基于多普勒效应LED灯光控制系统
2016-04-21 08:41:35梁佩莹梁泽汇范财武魏壮勇蔡静佛山科学技术学院光信息工程系广东佛山528000
佛山科学技术学院学报(自然科学版) 2016年2期
梁佩莹,梁泽汇,范财武,魏壮勇,蔡静(佛山科学技术学院光信息工程系,广东佛山528000)
基于多普勒效应LED灯光控制系统
梁佩莹,梁泽汇,范财武,魏壮勇,蔡静
(佛山科学技术学院光信息工程系,广东佛山528000)
摘要:介绍了一种基于多普勒效应的新型智能LED灯光控制系统的设计。根据多普勒效应原理,通过微波移动传感器HB100,探测有无物体通过,并产生多普勒信号,对输出的信号进行放大及滤波处理,利用汇编语言对单片机STC89C52进行编程,使系统在探测到有物体通过时点亮LED灯。系统测试采用两排LED灯模拟路灯并根据预测物体的移动速度,预判物体的位置,并点亮相应位置的LED灯,延时自动熄灭,达到节能照明的效果。设计的LED灯光控制器可以改变延时程序,从而改变亮灯的时间间隔,利于实际生活的应用。
关键词:多普勒效应;单片机STC89C52;LED照明
随着城市的发展,道路交通系统变得四通八达,道路照明也相应发展,但是路灯的使用却依然存在着不少问题。目前,国内路灯存在两方面的问题[1]:1)在繁华的大中型城市中,即使路上没有车辆或者行人时,路灯仍然开着,浪费了大量的能源,且由于路灯的长时间工作,也大大减小了其使用寿命。2)在人烟较为稀少的城市中,深夜都会关闭路灯,虽然减小能耗,但给此时出行的人带来极大的不便。随着科技的不断发展,LED以其功耗低、使用寿命长等优点,逐渐取代传统照明方式[2-3],LED路灯作为新型的照明光源应用于道路路灯上,一定程度上解决了能耗、寿命等问题。但是要从根本上解决国内路灯照明的以上问题,不仅需要一种新型的照明光源,而且要求有一种新型的控制系统,可以实现对于LED路灯照明的智能控制,达到真正环保节能的作用。本文对此进行研究。
1 灯光控制器的总体设计
基于多普勒效应的微波移动探测和单片机控制的智能LED灯光控制器,可以准确地探测出移动的物体,从而实现没有行人车辆通过的时候,或者行人车辆处于静止的时候,LED灯处于熄灭状态;有行人或车辆通过时,根据车辆通过的速度以及道路情况,智能地点亮此刻经过的LED灯以及前方一定数量的LED灯,并能智能的控制点亮时间。该控制器在提高LED灯利用率和节约能源的同时,又满足了夜间行人及车辆在任何时间任何地点出行时都有灯光照明。
本控制器采用单片机STC89C52、微波移动传感器HB100及后续放大滤波电路作为本设计的3个核心模块。通过传感器HB100检测行人以及车辆通过的速度,并将速度信号转换成电信号传输到单片机STC89C52,单片机处理这一信号,若满要求足则点亮LED灯。
智能系统主要由硬件和软件两个部分组成。硬件由传感器及其后续处理电路、LED灯、电源及复位电路和单片机等组成。系统的软件采用模块化程序设计思想,整个软件系统由主程序、初始化子程序、外部中断0子程序、计算子程序、亮灯程序、延时子程序等组成。系统原理流程如图1所示,整个系统的供电电压为5 V稳压电源,LED灯直接连接单片机的I/O口。
系统的工作原理为:工作的HB100不断发射微波,当有物体经过时,传感器接收反射回来的微波,将其频率信号转换成电信号,在没障碍物时持续为高电平,检测到物体经过时为低电平。速度达到1 m/s时信号特征是在10 ms内产生3个低脉冲,此时认为有行人或者车辆经过。这一信号线连接到单片机的外部中断0上,通过软件编程来判断是否有物体,从而确定是否点亮LED灯。

图1 系统原理流程
2 硬件电路设计
2.1控制模块
路灯智能控制器的控制模块使用STC89C52单片机。中断过程是在硬件基础上再配以相应的软件而实现的,不同的计算机其硬件结构和软件指令、中断系统不同。与中断有关的寄存器有4个,分别为中断源寄存器TCON和SCON、中断允许控制寄存器IE和中断优先级控制寄存器IP。有中断源5个,其排列顺序由中断优先级控制寄存器IP和顺序查询逻辑电路共同决定,分别对应5个固定的中断入口地址。
2.2探测模块
控制器的探测模块主要是利用微波传感器,应用多普勒效应实现。多普勒效应是指当发射源和接收者之间有相对径向运动时,接收到的信号频率将发生变化,这一物理现象可以运用到电磁波范围[4]。其多普勒频率fd为

式中,fd为多普勒频率[5],Vr为相对运动的速度,λ为工作波长,φ为初相。
当目标面向传感器运动时,多普勒频率为正值,接收信号频率高于传感器发射信号的频率;而当目标背离传感器运动时,多普勒频率为负值,接收信号频率低于传感器发射信号频率[6]。
多普勒微波传感器HBl00工作频率为10.525 GHz,应用多普勒原理,微波传感器传送低功率微波信号,并接收物体反射回来的信号。当微波传感器检测到物体的运动时,其反射的微波频率将产生偏移,这种偏移的微波与发射的微波相混合,从而在输出端产生低频电压。这种传感器模块适用于探测物体无接触运动,如自动门激活、汽车警报器、自动点火控制以及交通道路监控。
2.3信号处理
从HB100的IF端口输出的信号只有微伏级别,极不稳定,不利于实现信号的探测,所以必须经过滤波放大,此处使用四运算放大器LM224,采用如图2所示电路,由两个运放构成二级放大电路,以及两个一阶低频滤波器。
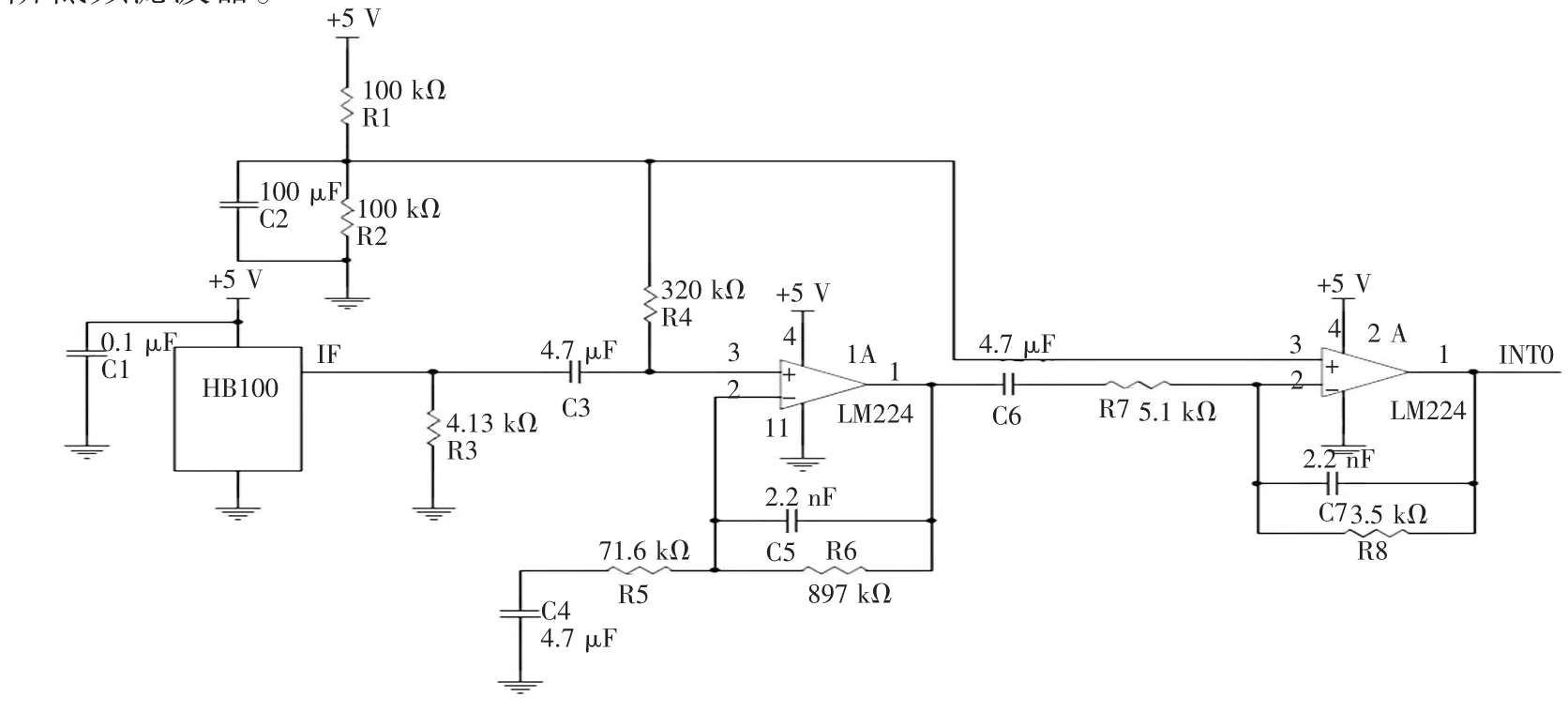
图2 多普勒信号滤波放大电路原理
2.4控制器的硬件接口设计
把控制器各部分电路接口连接起来,并且接上模拟路灯的8盏LED灯,接上12 MHz的晶振,则机器周期为1 μs,电路原理图如图3所示,+5 V电源采用实验室稳压电源。
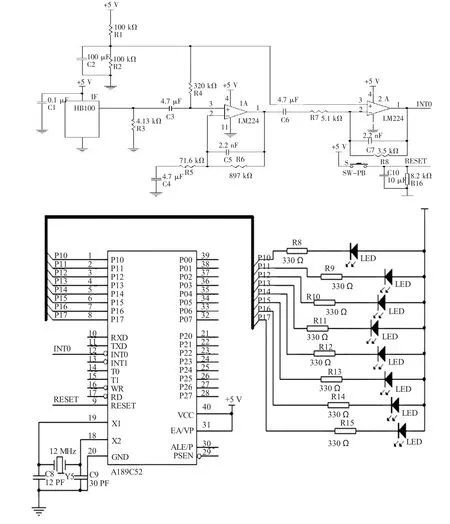
图3 控制器电路原理
3 系统的软件设计
软件设计,即单片机汇编程序的编写,通过与传感器检测信号线连接,检测在10 ms内是否有3个以上低脉冲出现,以确定是否有车辆或者行人经过,进而控制后边LED灯的点亮以及其点亮方式。程序包括:主程序、初始化子程序、外部中断0程序、亮灯程序、计算子程序和延时子程序。
3.1主程序设计
系统的主程序是对所需资源的初始化并等待中断,通过调用计算子程序确定有无车辆或者人经过,若有则运行亮灯程序点亮LED灯,通过延时程序控制LED灯的点亮时间。其流程如图4所示。

图4 主程序流程
3.2亮灯子程序
亮灯程序是外部中断0子程序的一部分,也是智能控制器的关键。当经过计算子程序后,若满足10 ms内3个以上低脉冲前提条件的情况下,先点亮前两盏LED灯,再调用延时程序,让灯持续点亮一段时间后,通过左移一位,并不断循环,依次点亮后边剩下的灯,且控制器点亮LED灯的方式为两两分别点亮。此程序可以控制并改变灯的点亮方式,可以根据实际需要对其进行修改。其程序流程如图5所示。

图5 亮灯子程序流程
3.3计算子程序
如图6所示,设定控制器亮灯的前提条件,即计算在10 ms内是否有3个以上的低脉冲,倘若有,则返回外部中断0程序,运行亮灯程序,点亮8盏LED灯;倘若没有,则返回,重新初始化,对下一个10 ms进行计数。通过此子程序,可以改变亮灯的前提,即将10 ms改为其他不同的时间间隔,观察控制器的亮灯情况,以此测试出控制器的灵敏度,并根据实际需要智能控制灵敏度。

图6 计算子程序流程
3.4延时子程序
延时子程序,即在满足亮灯条件下,控制灯的点亮时间。此处为了实验观察方便,把每两盏灯被点亮的时间都设定为0.5 s。也可以根据实际需要,即道路环境,行人以及车辆情况,对参数进行修改,以实现修改延时时间[7],提高灯的利用率,并减小能源损耗,也是此控制器的优势之处。其程序流程如图7所示。

图7 延时子程序流程
4 系统测试结果
系统信号经过滤波放大后,输入到单片机外部中断端口INT0,无干扰时的信号波形如图8a所示,有物体经过时的信号波形如图8b所示。此时可以观察到单片机的8盏灯被依次点亮,如图9所示。
把微波传感器的接收面对着通道,让人在通道上行走,模拟道路上的行人情况,以测试控制器的具体使用范围。经过测试,当LED灯的点亮条件为10 ms、系统输出电压为15 V时,设计的LED灯光控制器能实现半径为5.60 m,圆心角为900°的扇形范围内的智能控制。
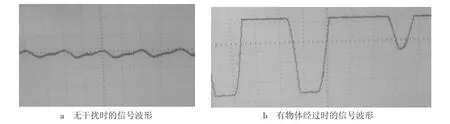
图8 系统测试波形
调节电阻,改变输出信号的峰-峰值,如表1所示,LED灯光控制器有效范围也会发生变化。
通过亮灯子程序改变LED灯点亮条件,如表2所示,不同的点亮条件对应不同的最大控制距离。实验表明,控制器的灵敏度随着LED灯点亮条件的时间间隔增大而增大,但与此同时也会降低其抗干扰能力,使其受到周围环境影响变大。根据道路的情况,如行人的多少,道路的长短等,可以控制延时子程序,即控制LED灯依次点亮的时间,实现智能节能的功能。
图9 LED灯被点亮

表1 有效距离随输出电压变化

表2 不同的点亮条件对应的最大控制距离
5 小结
实验表明,设计的基于多普勒效应的新型的智能LED灯光控制器可以根据环境的情况控制LED灯的通断,并控制LED灯依次点亮的时间,实现半径为5.6 m,圆心角为90°的扇形范围内的智能控制。系统适合于道路、楼道、小区、走廊、家居等场所,可实现节能照明的效果。
参考文献:
[1]辛红伟,唐慧强,彭树生.多普勒路灯智能控制器及其应用方案研究[J].电力电子技术, 2007, 41(10): 31- 33.
[2]李静,王永亮,段海龙,等. LED可见光的虚拟仪器通信系统[J].电子测量与仪器学报, 2011, 25(10): 901- 904.
[3]尤泳,王永清,计鑫山,等.光伏供电的LED照明路灯测控电路设计[J].电子测量技术, 2012, 35(1): 11- 13.
[4]漆安慎,杜婵英.普通物理教程力学[M].北京:高等教育出版社, 1997.
[5]OBERSON P, HUTTNER B, GISIN N. Frequency modulation via the Doppler effect in optical fibers[J]. Optics Letters, 1999, 24(7): 451- 453.
[6]王令辉,戴石良,胡海洋.一种烟丝微波速度计的设计与实现[J].工业仪表与自动化装置, 2012(2): 84- 86.
[7]汪文明.综合传感器实验教学内容设计探讨[J].物理与工程, 2008(6): 30- 33.
【责任编辑:任小平renxp90@163.com】
The LED lighting control system based on the doppler effect
LIANGPei- ying,LIANGZe- hui, FANCai- wu, WEI Zhuang- yong,CAI Jin
(Department of Photoelectric Information and Engineering,Foshan University, Foshan 528000, China)
Abstract:The design of an intelligent LED lighting control system is introduced. According to Doppler Effect, by using a microwave based motion sensor HB100, moving targets could be detected and Doppler waves would be generated consequently. After amplifyingand filteringthe output signal of HB100, byusinglogics and algorithms described in this paper, a STC89C52 microcontroller system could control the street lighting system to illuminate the movingtargets accordinglyon time. In the experiment, towrows of LEDlights were used tosimulate the street lighting system and by lighting the LEDs successively according to the moving target’s position which is predicted by the system, energy- saving lighting is achieved. The latency and the interval of the lighting behavior could be adjusted accordingtothe needs fromreal deployments.
Keywords:Doppler effect; STC89C52 MCU; LEDlighting
作者简介:梁佩莹(1975-),女,广东佛山人,佛山科学技术学院讲师。
基金项目:2015年度广东省大学生科技创新培育专项资金资助项目;佛山市科技发展专项基金资助项目(2012AA100361)
收稿日期:2015-10-13
文章编号:1008- 0171(2016)02- 0049- 05
中图分类号:TP332.3
文献标志码:A