
浅谈列车动力性能型式试验
2016-04-21 10:39邢井超
科技与创新 2016年6期
邢井超
摘 要:对地铁车辆进行动力性能型式试验后发现,列车的动力性能有时仍无法满足信号系统停车精度调试的需求。简要介绍了列车重新定型调整的软件优化问题,并提出了可供参考的改进建议。
关键词:型式试验;牵引系统;制动系统;加速度
中图分类号:U441.3 文献标识码:A DOI:10.15913/j.cnki.kjycx.2016.06.116
型式试验是验证一个或多个装置、系统或整车设计是否满足规定的技术条件和有关标准的试验。牵引性能和制动性能是地铁车辆运行的基本,也是地铁车辆运行中的关键因素,因此,对牵引性能和制动性能的测试是列车型式试验中的重点工作。
1 列车的动力性能要求
一般项目对列车动力性能的要求如下:
一般情况下,项目信号系统对列车动力性能的要求如表1所示,项目信号系统对列车平均加速度的要求如表2所示,项目信号系统对列车减速度的要求如表3所示。
2 实际运行中存在的问题
目前,在一般项目的型式试验中,列车动力性能的评判标准基于合同中对列车动力性能的要求,并以列车的平均加、减速度(启动加速度),最大速度加速度和最大速度减速度作为判断依据。值得注意的是,虽然平均减速度的可作为判断依据,但瞬时减速度无法满足评判要求。
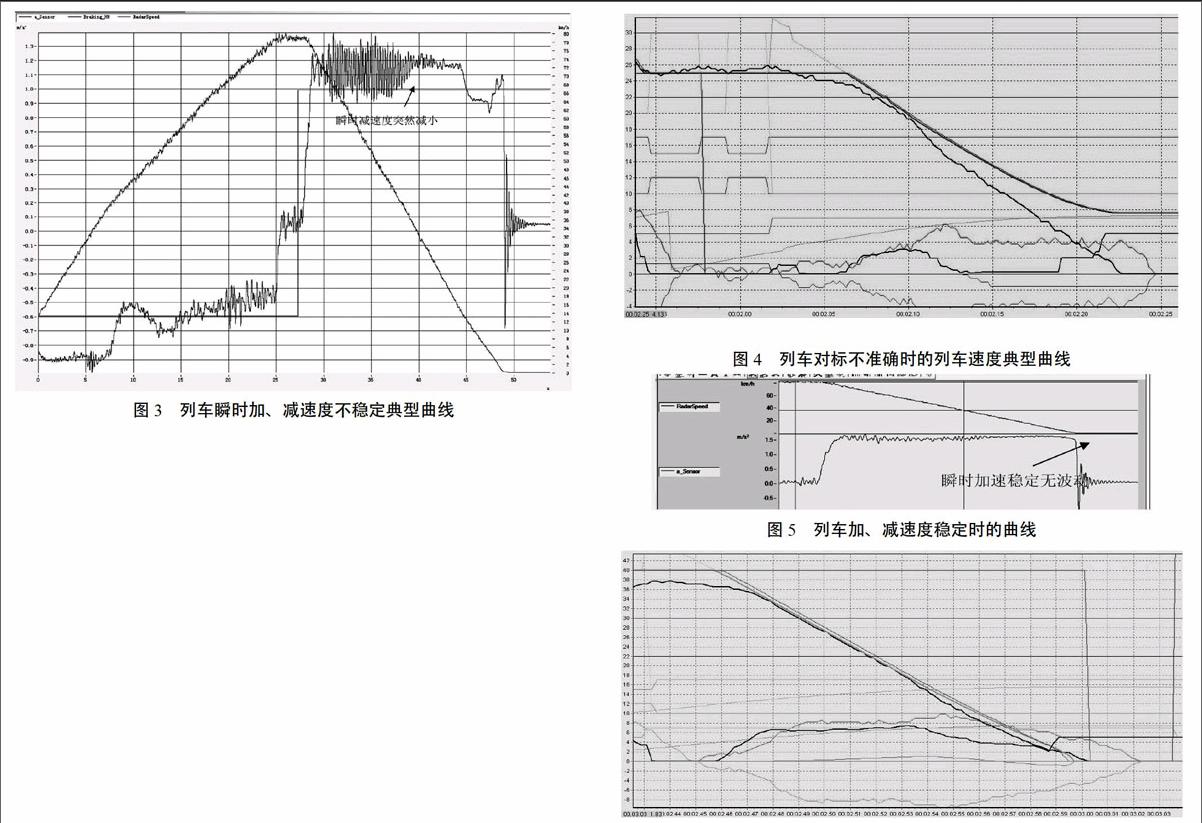
图3为某项目列车在梯度为0.7%的坡道的最大常用制动的测试曲线和数据。
值得注意的是,列车制动初始速度为78.863 km/h,制动距离为241.312 m。坡道修正公式为:
式(2)中:L1为正确的停车制动距离,m;L为测得的停车制动距离,m;V0为初始基准速度,km/h;V为实际初始速度,km/h;i为梯度;R0为转动惯量因数,一般取0.08.
根据式(2)计算出的制动距离为233.350 1 m,平均加速度a为1.058 m/s2。由此可见,该项目列车的减速度完全可满足合同要求,但因部分速度区间的瞬时减速度无法满足ATO系统的要求,当ATO系统采用此速度进行组织列车停车时,易出现欠标或冲标的现象。
综上所述,只采用平均减速度为评定标准时,会产生以下影响。
2.1 影响型式试验的校准检定作用
从理论上看,列车完成动力性能型式试验后,其动力性能可满足列车在任何驾驶模式下的控制需求,且列车中的重要系统(牵引系统和制动系统)的软件已经固化,不会改变。但因瞬时加、减速度无法满足要求,导致列车的动力性能无法满足信号系统停车精度调试的需求,进而增加了重新调整定型后软件优化的工作量,消弱列了车型式试验的作用,使业主不再信任检验机构提供的型式试验结果。
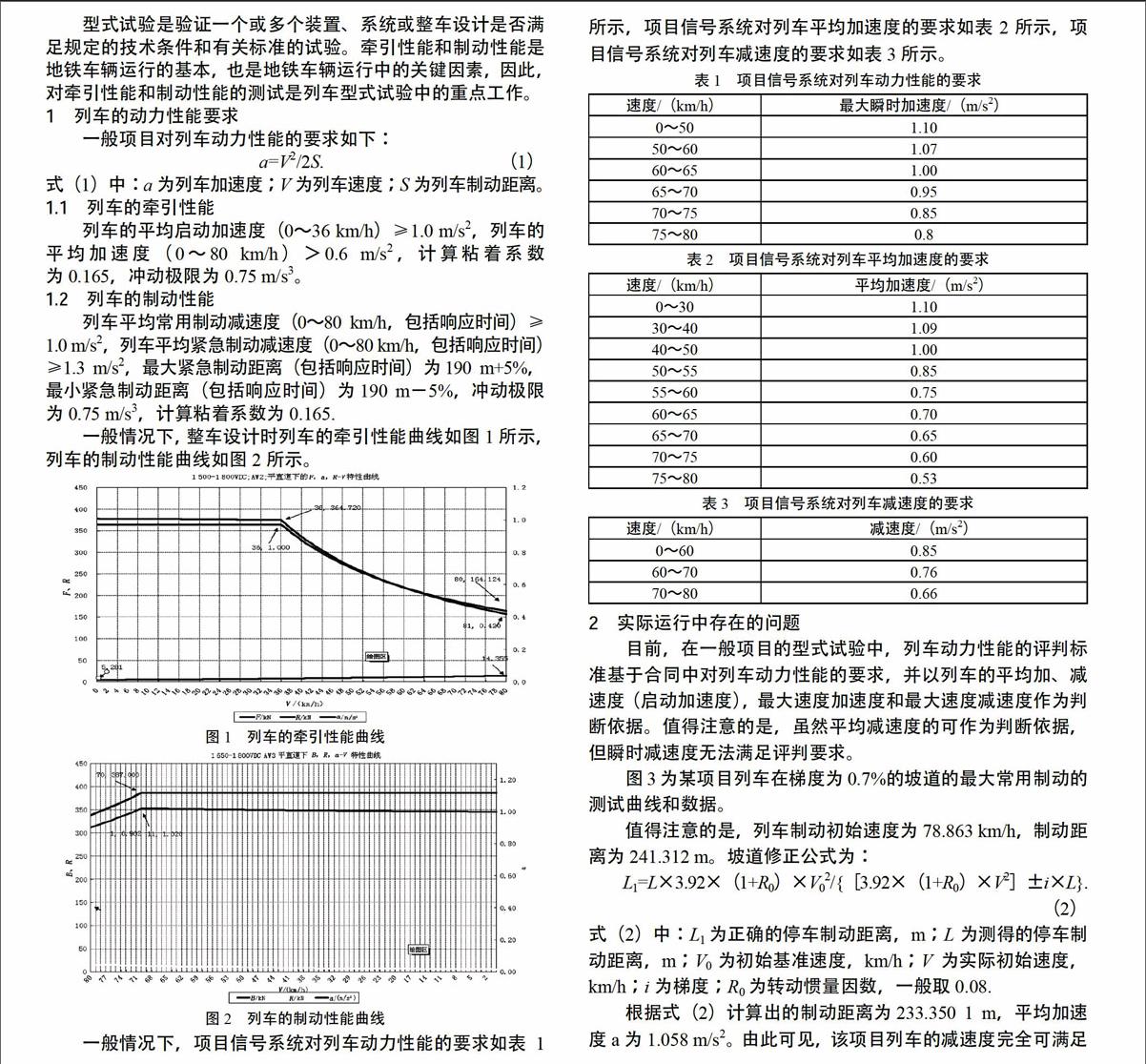
2.2 影响列车在ATO系统下的停车精度
当列车的制动力需求减小、实际制动力变大时,会导致列车快速减速,实际停车距离短于预期停车距离,进而发生提前停车的情况;当列车的制动力需求增大、实际制动力变小时,会导致列车减速过慢,实际停车距离长于预期停车距离,进而发生列车延后停车的情况。上述两种情况都会影响列车的停车精度,导致列车车门与车站安全门的对位不准确,进而造成车门打开后乘客无法快速上、下车。在列车投入自动驾驶模式时,系统对列车停车位置和停车精度的要求非常高,如果停车位置不准确,则信号系统将无法收到列车进站的信号,导致信号系统无法发出列车开门的信号,进而造成列车车门无法打开。此时,列车必须转换至人工驾驶模式,由列车司机进行二次对标,并将列车停至合适的位置,从而避免对列车运营造成较大的影响。列车对标不准确时的列车速度典型曲线如图4所示。
3 整改效果
针对上述问题,应在型式试验中增加列车的瞬时加速度,并基于列车的瞬时加速检测和评定。图5为列车加、减速度稳
定时的曲线。
从图5中可以看出,列车的瞬时减速度变化相当平稳,无异常波动。因此,列车的平均减速度可满足ATO系统的要求,且瞬时减速度也可满足ATO系统的要求,列车在运行过程中将更加平稳、易控。
图6为动力性能稳定的列车在自动驾驶模式下的速度曲线。
橙色线——ATO系统要求的列车速度曲线;蓝色线——列车的实际速度曲线
橙色线——ATO系统要求的列车速度曲线;蓝色线——列车的实际速度曲线
从图6中可以看出,列车的实际速度曲线基本上紧贴ATO系统要求的速度曲线。由此可见,列车的动力性能可完全满足ATO控制的需要。
4 结束语
综上所述,本文基于列车平均加、减速度的测试,提升了列车的动力性能和制动性能,以期为相关单位的需要提供理论基础。
参考文献
[1]王冬雷.地铁车辆电空混合制动平滑过渡问题分析及改进建议[J].电力机车与城轨车辆,2010(03).
〔编辑:张思楠〕
猜你喜欢
新高考·教师版(2016年2期)2017-07-05
农机使用与维修(2016年12期)2017-01-17
未来英才(2016年14期)2017-01-12
科技传播(2016年19期)2016-12-27
科技创新与应用(2016年34期)2016-12-23
安徽理工大学学报·自然科学版(2016年2期)2016-12-22
中学生数理化·高一版(2016年8期)2016-12-07
科技视界(2016年22期)2016-10-18
新高考·高一物理(2016年3期)2016-05-18
新高考·高一物理(2015年5期)2015-08-18
