陆海风力机动态响应对比
2016-04-18 08:12:58丁勤卫周国龙
动力工程学报 2016年1期
丁勤卫, 李 春,2, 周国龙, 叶 舟,2
(1.上海理工大学 能源与动力工程学院,上海 200093;
2.上海市动力工程多相流动与传热重点实验室,上海 200093)
陆海风力机动态响应对比
丁勤卫1,李春1,2,周国龙1,叶舟1,2
(1.上海理工大学 能源与动力工程学院,上海 200093;
2.上海市动力工程多相流动与传热重点实验室,上海 200093)
摘要:以NREL实测数据为湍流风场数据源,以NREL 5 MW风力机为样机,并结合波浪作用,分别研究了陆海风力机平台及各柔性部件的动力学响应.结果表明:平台运动形式主要为纵荡、纵摇和首摇;漂浮式风力机的叶根摆振力矩和纵向剪力要大于陆上风力机;漂浮式风力机塔尖和塔基纵向剪力及塔基俯仰力矩的波动范围为陆上风力机的3倍;漂浮式风力机塔尖运动加速度呈现高频和大跨度的特点.
关键词:风力机; 湍流风; 波浪; 动态响应; 力和力矩
在煤、石油和天然气等常规能源日益短缺的当今世界,风能由于其安全、无污染和可再生等优点逐渐成为诸多国家和地区关注的焦点[1].与陆上风能相比,海上风能具有储量大、分布广和不占用土地等优点[2-4].据统计,截止到2012年底,全球海上风电累计装机容量达到5 111 MW,其中中国海上风电新增装机46台,容量达到127 MW[5].因此,“由陆向海、由浅向深、由固定基础向漂浮式平台”是未来风电场建设的必然趋势[6-7].
风载荷是风力机正常运行时叶片等柔性部件受到的主要载荷,由于未考虑风的强不均匀性及叶片气动弹性响应,叶片在远未达到最大设计风速时就遭到破坏[8-9],因此对高风速及风速突变作用下的风力机柔性部件动态响应的研究值得重视.与陆上风力机相比,漂浮式风力机除了受到风作用于风轮和塔架产生的气动载荷外,塔架和基础还受到波浪作用的水动力载荷,从而使机组的动态响应呈现出复杂的变化,2002年以来,陆续有学者对此进行了初步的研究[10-12].Bulder[13]采用线性频域方法,通过添加附加质量、附加阻尼等方式引入风力机的气动和结构特性,对漂浮式风力机进行初步分析.Henderson等[14]将风力机模拟软件与水动力学软件相结合,建立了漂浮式风力机非线性时域动力学模型.Jonkman[15]对漂浮式风力机进行动力学理论建模,并对Spar平台、张力腿平台(TLP,Tension Leg Platform)和驳船平台进行动力学特性对比.目前,国内对漂浮式风力机发电机组尤其是对整机进行的动力学动态响应研究较少,不仅如此,对漂浮式风力机的研究仅侧重于漂浮式平台的动态响应及稳定性分析,而对漂浮式风力机柔性部件动力学响应的研究关注较少[16-18].
因此,为更直观地得出湍流风和波浪作用下风力机整机的动态响应,笔者建立轮毂高度处平均风速为12 m/s的风场模型,并结合不规则波浪载荷作用对陆上风力机和漂浮式风力机进行仿真模拟,对比分析了陆海风力机各部件的动态响应.
1风力机模型及坐标系
陆上风力机和漂浮式风力机均选择NREL 5 MW风力机,风力机参数见表1[19].
TLP平台是一种典型的深海风电机组支撑平台,其能够在陆上安装和调试,从而避免海上安装的各种难题,最显著的特点是运动性能好,抵抗恶劣环境能力强且造价低.本文漂浮式平台选择MIT/NREL TLP,平台参数见表2[20].
为方便计算,在风力机及基础(漂浮式风力机基础为平台)上建立多个相对坐标系,分别为叶片坐标系{O,X,Y,Z}、轮毂坐标系{O′,X′,Y′,Z′}、塔架坐标系{O″,X″,Y″,Z″}和基础/平台坐标系{O‴,X‴,Y‴,Z‴},各结构部件坐标系如图1所示.

表1 风力机参数
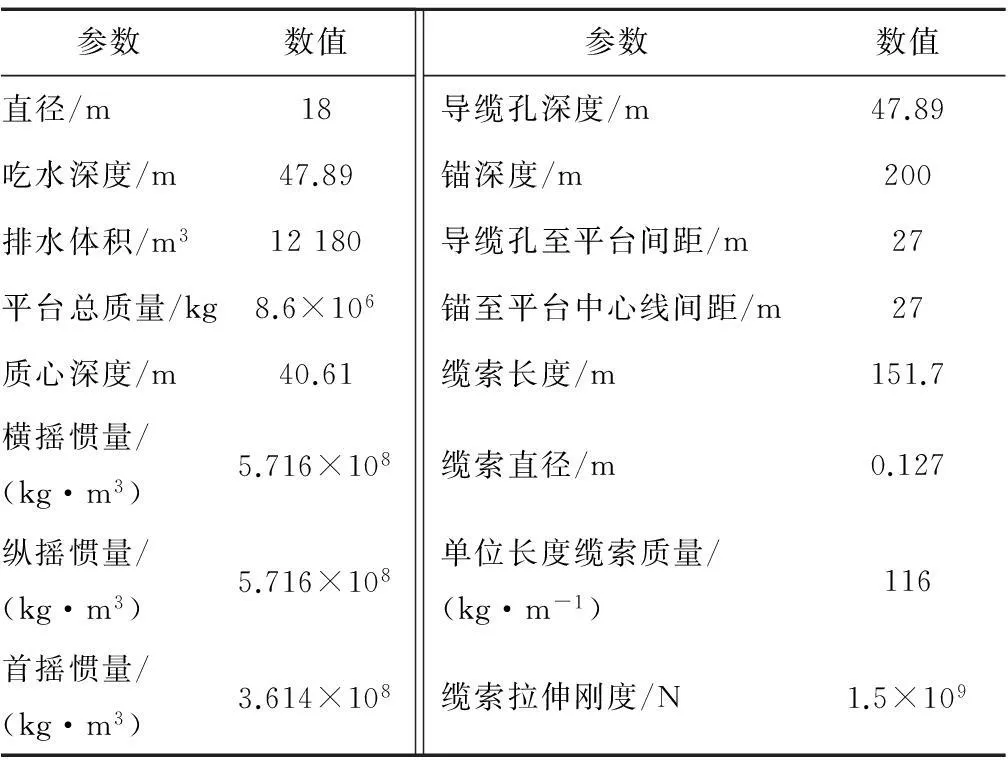
表2 TLP平台参数

图1 风力机坐标系
2风场模型及气动理论
2.1风场模型建立
风场模型与风载荷直接相关,风场模型选择的准确性刻画了风力机运行的真实环境.为真实模拟时域高风速湍流风况下风力机的动态响应特性,笔者选用由NWTC(National Wind Technology Center)建立的NWTCUP模型,该模型基于NWTC/LIST项目,由实测40 Hz时间序列数据构成该湍流模型速度谱[21].根据风轮参数设计风场覆盖区域为145 m×145 m(以轮毂中心为参考点).
通过幂律风廓线形式描述风剪切效应,水平方向速度变化规律采用对数风廓线表示:
(1)
式中:u(z)为垂直方向速度分布;u(zhub)为轮毂处垂直方向风速;z为计算节点高度;zhub为轮毂高度;u(y)为水平方向速度分布;u(yhub)为轮毂处水平方向风速;y为计算节点水平位置;yhub为轮毂水平位置;z0为地表粗糙度,其值取0.021;ψ为垂直稳定度无量纲函数.
在轮毂坐标系{O′,X′,Y′,Z′}中,以轮毂高度处风速12 m/s为参考风速,建立湍流风风场,轮毂高度处风速时域分布如图2所示.其中uX′,uY′和uZ′为湍流风在X′、Y′和Z′方向的风速大小.
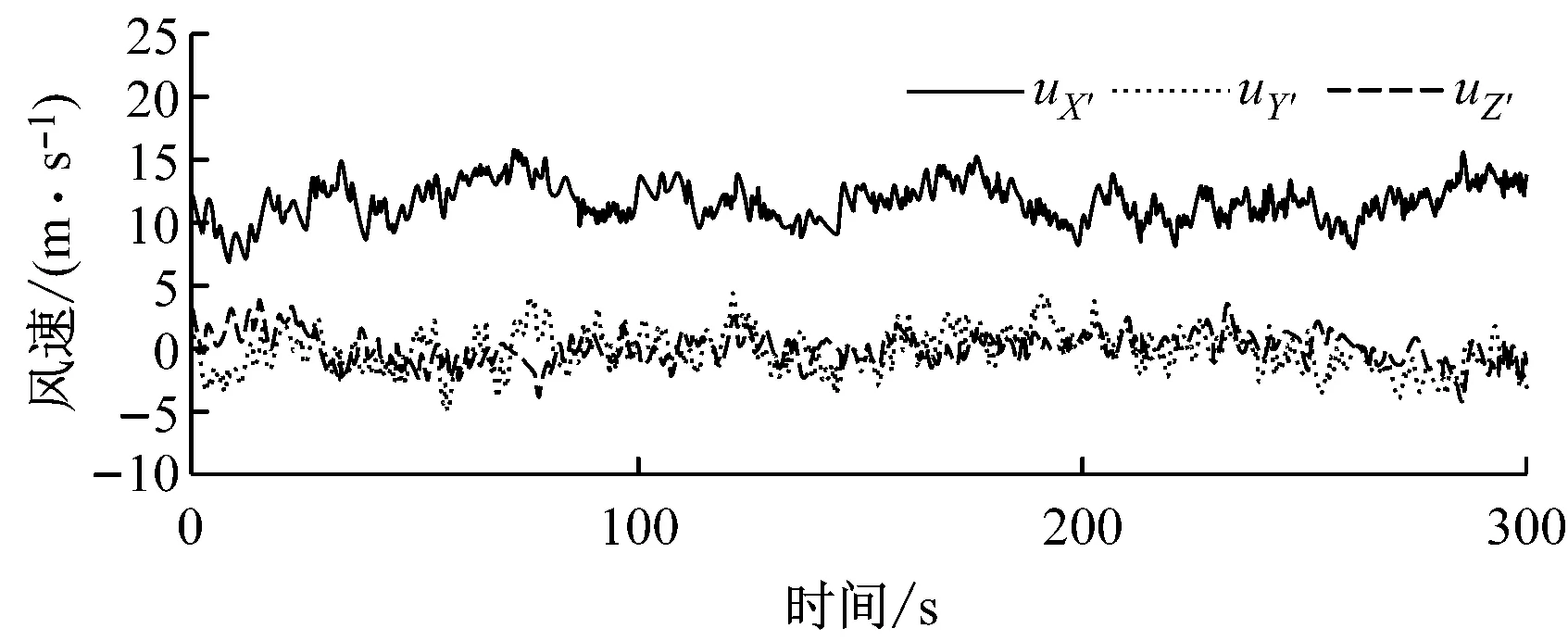
图2 轮毂高度处风速时域分布
由图2可知,来流风X′方向风速波动范围为6.52~16.2 m/s,平均风速为11.7 m/s;Y′方向风速波动范围为-4.92~4.58 m/s,平均风速为0 m/s;Z′方向风速波动范围为-4.22~3.91 m/s,平均风速约为0 m/s,瞬时风速的大小主要取决于X′方向风速.
2.2动态入流理论
风轮气动计算的本质就是利用流体力学控制方程求解流场压力和速度分布规律,基于加速度势的动态入流理论,利用分离变量的方法求解Laplace方程表达的压力分布,然后通过Euler方程求解速度分布,结合BEM(Blade Element Moment)理论模型求解风轮气动力.
Pitt-Peters动态入流理论模型通过3个参数描述风轮平面诱导速度的变化规律,通过求解诱导速度来获知风轮平面压力分布.式(2)为风轮平面由于扰动引起的诱导速度非均匀分布的一阶Fourier级数表达式.
(2)

气动力变化和诱导速度的关系为:
(3)
式中:M为风轮动态入流的质量矩阵,反映了入流动态特性;V为质量流量参数矩阵;L为入流增益矩阵;CFT、CMy、CMz分别为风轮推力系数、偏航系数和俯仰系数.具体表达式如下:
(4)
(5)
(6)
(7)

通过求解微分方程式(3)得到风轮平面诱导速度场,结合相应的翼型空气动力学特性,求解风轮气动力.
3波浪谱及辐射/绕射理论
3.1波浪谱
海浪可视为是由无限多个振幅不同、频率不同、方向不同、位相杂乱的简单余弦波组成的.波浪谱是随机海浪的一个重要统计性质,它不仅包含着海浪的二阶信息,而且还直接给出海浪组成波能量相对于频率和方向的分布.波浪谱描述海浪能量相对于组成波的分布,故又名“能量谱”、“功率谱”和“方向谱”.常用的波浪谱形式有P-M谱、JONSWAP谱、劳曼谱和布氏谱等[22].笔者采用JONSWAP谱:

(8)
设定波浪高度为5 m,波浪周期为9 s,波浪高度时域分布如图3所示.

图3 波浪高度时域分布
3.2辐射/绕射理论[23]
海洋工程水动力计算使用的Morison方程是依据结构物的存在对入射波动场无显著影响这一基本假定建立的,即当结构物特征长度大于0.2倍的波长时,绕射问题就会发生.TLP平台的截面直径大于入射波波长,因此计算平台的波浪力时,Morison方程不再适用.
设定入射波为微幅波,因此漂浮式平台动力学问题可分解成3个部分来分析计算:绕射作用、辐射作用和水静力学作用.
绕射作用是假定平台固定在某个位置时,被平台分散的入射波作用在平台上而产生的载荷.波浪绕射作用力为:
(9)
式中:W(ω)为高斯白噪声时序的傅里叶变换;Xi(ω,β)为作用在浮式平台上的单位波浪力,β为入射波的方向角.
平台在不受任何波浪力作用的情况下所受浮力为:
(10)

(11)
式中:A0为平台在静水中的水线面面积;ZCOB为浮心的坐标.
辐射作用是假定不考虑入射波的影响,浮式平台在自由面上以不同运动模式振荡时,产生从四周辐射出去的波浪,该辐射波浪对浮式平台产生的作用力为:
(12)

将式(9)、式(10)和式(12)相加,可得浮式平台所受的水动力为:
(13)
4多体动力学模型
基于Kane方法[24]建立的多体动力学模型将风力机视为具有N个自由度的刚体和柔体结构系统.

(14)
即每个广义速率对应的广义主动力和广义惯性力之和等于零.其中,广义主动力Fr由各部件的重力、气动力、弹性力和水动力组成:
(15)
(16)

将式(15)和式(16)代入式(14)中,可得风力机系统动力学方程:
(17)

(18)

通过4阶Adams-Bashforth预测-校正方法求解式(17)和式(18),前4个时间步通过Runge-Kutta法求解.
5结果与分析
5.1漂浮式平台动态响应
漂浮式平台最直观的动态响应是在外界环境载荷作用下的位置变化,即平动位移和转动角.平台坐标系{O‴,X‴,Y‴,Z‴}中,漂浮式风力机TLP平台六自由度上的运动包括沿X‴轴、Y‴轴和Z‴轴的平动及绕各轴的转动.平动包括纵荡(Surge)、横荡(Sway)和垂荡(Heave),其大小由长度单位表示;转动包括横摇(Roll)、纵摇(Pitch)和首摇(Yaw),其强弱由角度单位表示.图4为TLP平台在湍流风和波浪联合作用下的六自由度动态响应.
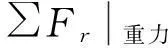
由图4可知,TLP平台在湍流风和波浪联合作用下不论平动方向抑或转动方向均做非周期性往复运动;纵荡方向,平台自初始时刻起逐渐偏离初始位置,在40 s左右平动位移达到最大值8 m,之后运动幅度减小且随着时间在4 m左右呈现出往复增大减小的趋势;与纵荡方向相比,垂荡和横荡方向位移几乎为0不变.平台偏转剧烈程度,首摇>纵摇>横摇,横摇方向角度几乎为0,纵摇方向角度为-0.4°~0.8°,首摇方向角度为-1°~2°.

(a) 平动位移
(b) 转动角
5.2风力机柔性部件动态响应
风力机的柔性部件主要为叶片、塔架和低速传动轴,与叶片和塔架相比,低速传动轴刚度较大、位移较小.叶尖受力过大会撞击塔架,叶根受力过大会导致风力机破坏,塔架受力过大会诱发其大幅震动进而导致失稳,因此柔性部件研究重点为叶片和塔架.
图5为湍流风和波浪联合作用下陆上风力机与TLP平台漂浮式风力机风轮功率的时域动态特性及对比.由图5可知,由于来流风为风速时刻变化的湍流风,且风力机因采用变速变桨控制策略,因此功率时刻变化,对比轮毂高度时域风速可知,当风速低于额定风速时,风力机功率与风速变化一致,当风速超过额定风速时,风力机功率稳定在额定功率附近.

图5 风力机功率
因漂浮式风力机处在不规则波作用的海洋环境中,功率波动相对于陆上风力机更为剧烈,从而说明计算结果的可靠性.
图6为陆上风力机和漂浮式风力机叶根所受载荷的动态响应及对比.在叶片坐标系{O,X,Y,Z}中,X方向为纵向,Y方向为横向;叶片在XOZ平面内的运动为挥舞,在YOZ平面内的运动为摆振.

(a) 叶根挥舞力矩

(b) 叶根摆振力矩

(c) 叶根变桨力矩

(d) 叶根纵向剪力

(e) 叶根横向剪力
风力机叶片主要受到风载荷作用,由图6可知,无论基础是否固定,风速波动时叶根载荷呈现出非周期性往复波动.陆上和漂浮式风力机的叶根挥舞力矩、叶根变桨力矩和叶根横向剪力变化趋势、数值大小较为接近;虽叶根摆振力矩和叶根纵向剪力变化趋势相同,但数值上漂浮式风力机略大于陆上风力机.计算结果表明,平台的存在对叶根载荷的影响主要体现在叶根摆振力矩和叶根纵向剪力上.
图7为陆上风力机和漂浮式风力机塔尖所受载荷的动态响应及对比.在塔架坐标系{O″,X″,Y″,Z″}中,X″方向为纵向,Y″方向为横向.

(a) 塔尖横摇力矩

(b) 塔尖俯仰力矩

(c) 塔尖偏航力矩

(d) 塔尖纵向剪力

(e) 塔尖横向剪力
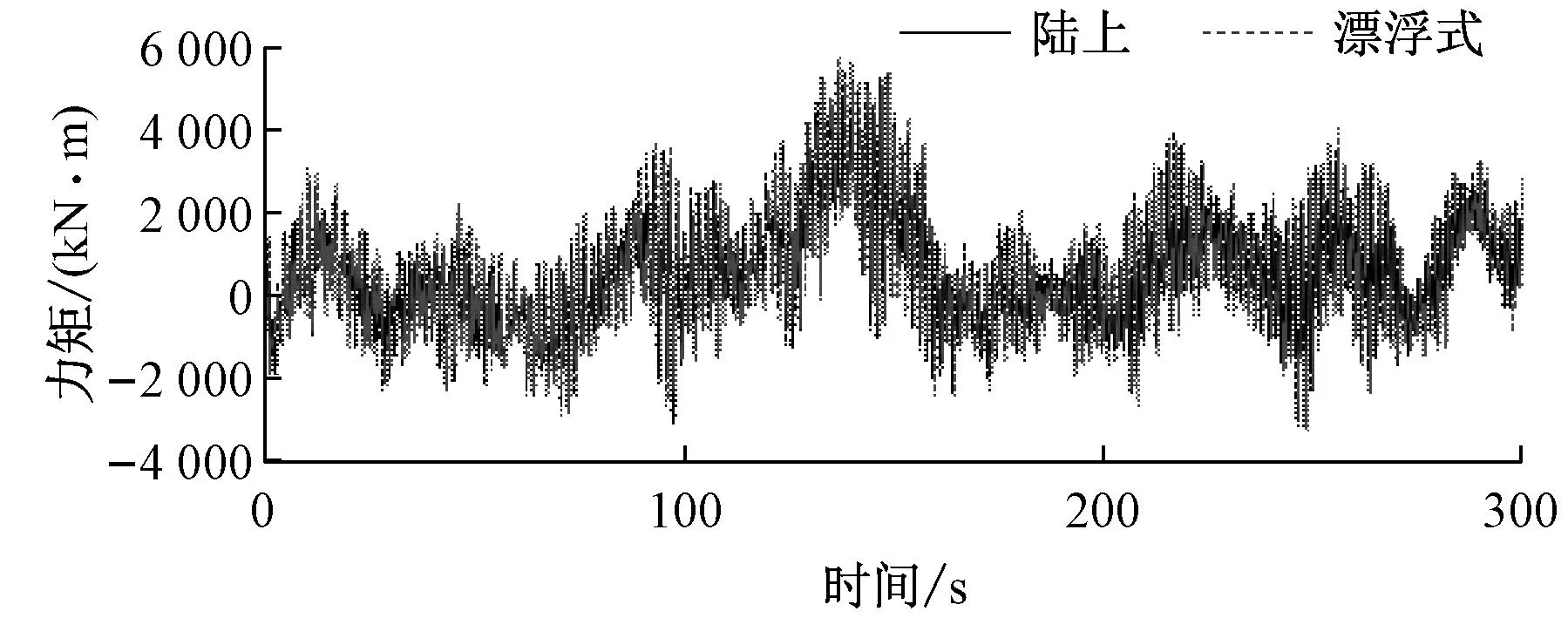
由图7可知,风力机塔尖载荷呈现出非周期性往复波动.风力机启动时,2种类型风力机塔尖载荷波动十分剧烈,前20 s内的波动范围为36.1~6 190 kN·m,稳定之后的波动范围为2 970~4 770 kN·m,前20 s内的波动范围为稳定后的3倍.陆上塔尖俯仰力矩和塔尖偏航力矩变化趋势和量级均与漂浮式较接近,但在数值上略小于漂浮式.风力机启动20 s后,陆上风力机塔基纵向剪力波动范围为273~934 kN·m,漂浮式风力机为-362~1 540 kN·m,为陆上风力机的3倍.前150 s 2种风力机的塔尖横向剪力较为接近,但随后漂浮式风力机塔尖横向剪力的波动剧烈程度远大于陆上风力机.
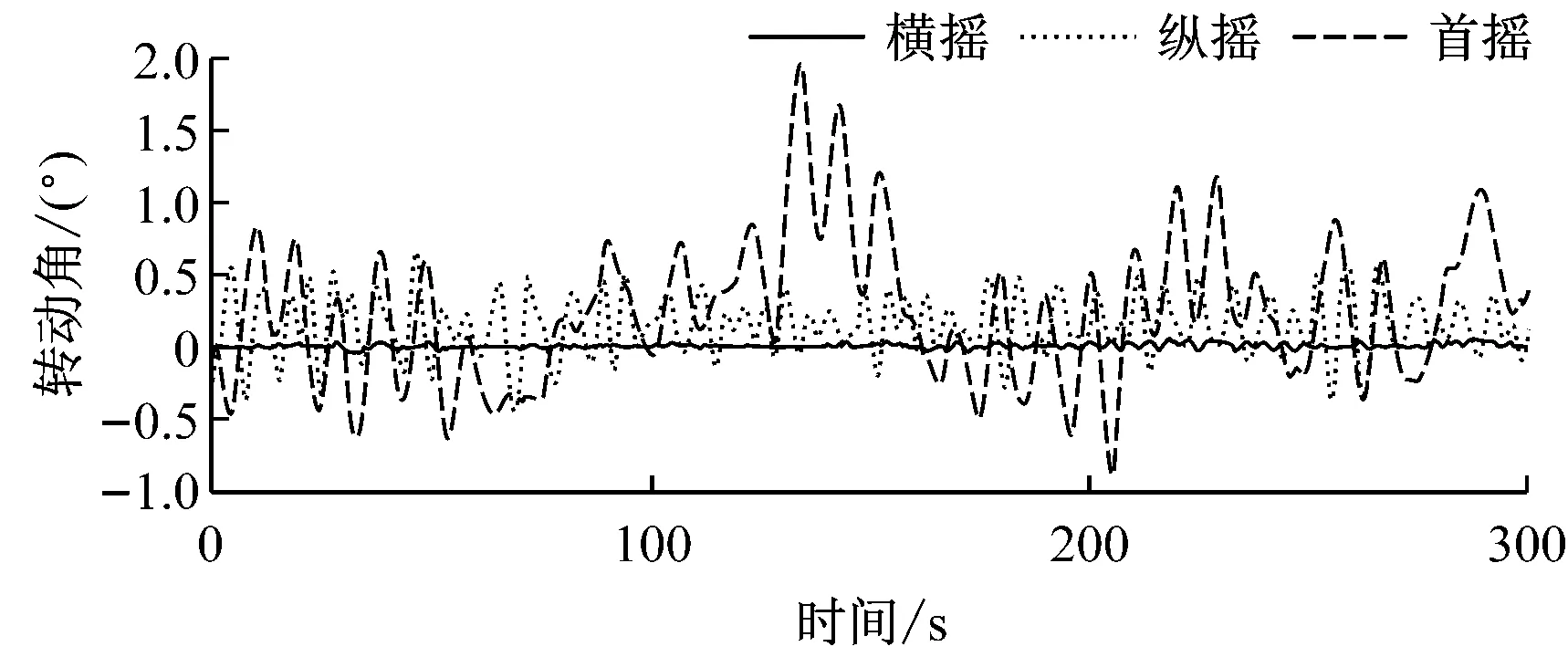
图8为陆上风力机和漂浮式风力机塔基载荷的动态响应及对比.由图8可知,风力机塔基载荷呈现出非周期性剧烈波动.陆上风力机塔基横摇力矩、偏航力矩和横向剪力均与漂浮式较接近.风力机启动20 s之后,陆上风力机塔基俯仰力矩波动范围为29 600~81 600 kN·m,漂浮式为-21 300~132 000 kN·m,为陆上风力机的近3倍;陆上风力机塔基纵向剪力波动范围为273~934 kN,漂浮式为-362~1 540 kN,为陆上风力机的近3倍.

(a) 塔基横摇力矩

(b) 塔基俯仰力矩
(c) 塔基偏航力矩
(d) 塔基纵向剪力

(e) 塔基横向剪力
5.3振动特性响应对比
图9为漂浮式风力机平台加速度在湍流风和波浪联合作用下在纵荡、横荡和垂荡方向的动态响应.由于陆上风力机基础深埋底下,位移几乎为0,故只分析漂浮式风力机平台加速度.由图9可知,平台在横荡和垂荡方向加速度几乎为0,纵荡方向加速度呈非周期性往复波动,波动范围为-1.5~1.5 m/s2.

图9 平台加速度
图10为陆上风力机和漂浮式风力机叶尖位移加速度的动态响应及对比.由图10可知,叶尖位移加速度几乎不受风力机基础是否固定的影响,陆上和漂浮式叶片叶尖挥舞加速度和叶尖摆振加速度变化趋势、数值大小均接近.

(a) 叶尖挥舞加速度

(b) 叶尖摆振加速度
图11为陆上风力机和漂浮式风力机塔尖加速度动态响应及对比.由图11可知,陆上风力机塔尖加速度在纵荡和垂荡方向几乎为0,横荡方向加速度波动范围为-0.2~0.2 m/s2,漂浮式风力机塔尖加速度在纵荡、横荡和垂荡方向均呈现出高频、跨度大的特点,其中纵荡方向波动范围为-2~2 m/s2,横荡方向波动范围为-0.2~0.2 m/s2,垂荡方向波动范围为-0.1~0.1 m/s2.

(a) 塔尖纵荡加速度

(b) 塔尖横荡加速度

(c) 塔尖垂荡加速度
6结论
(1) TLP平台六自由度上的运动主要为纵荡方向平动和纵摇、首摇方向转动,纵荡方向运动幅值为8 m左右,纵摇方向角度为-0.4°~0.8°,首摇方向角度为-1°~2°.
(2) 叶根摆振力矩、纵向剪力受平台是否固定影响较大,数值上漂浮式基础略大于陆上,而叶根挥舞力矩、变桨力矩和横向剪力几乎不受平台不固定影响.
(3) 塔尖横摇力矩、俯仰力矩、偏航力矩和塔基横摇力矩、偏航力矩、横向剪力受平台是否固定影响较小;漂浮式风力机塔尖纵向剪力、塔基纵向剪力和塔基俯仰力矩波动范围均为陆上风力机的近3倍.
(4) 叶尖挥舞加速度和叶尖摆振加速度受平台是否固定影响较小,二者较为接近,陆上风力机塔尖在纵荡、横荡和垂荡方向加速度几乎为0,而漂浮式风力机塔尖加速度均不为0,且均呈现出高频、跨度大的特点.
参考文献:
[1]郑崇伟,胡秋良,苏勤,等.国内外海上风能资源研究进展[J].海洋开发与管理,2014(6):25-32.
ZHENG Chongwei, HU Qiuliang, SU Qin,etal. Research progress of offshore wind energy resources at home and abroad[J].Marine Development and Management,2014(6):25-32.
[2]JUNGINGEER M, FAAIJ A, TURKENBURG W C. Cost reduction prospects for offshore wind farms[J]. Wind Engineering, 2004, 28(1): 97-118.
[3]U. S. Department of Energy(U. S. DOE). 20% wind energy by 2030: increasing wind energy's contribution to U. S. electricity supply[M]. Washington, USA: U. S. DOE, 2008.
[4]李少华,匡青峰,吴殿文,等.1.2 MW风力机整机流场的数值模拟[J]. 动力工程学报,2011,31(7):551-557.
LI Shaohua, KUANG Qingfeng, WU Dianwen,etal. Numerical simulation on flow field of a 1.2 MW wind turbine[J]. Journal of Chinese Society of Power Engineering, 2011, 31(7):551-557.
[5]苏晓. 2012年全球海上风电发展统计与分析[J]. 风能,2013(6):30-35.
SU Xiao. Statistics and analysis of global offshore wind power development in 2012[J].Wind Turbine,2013(6):30-35.
[6]高坤,李春,高伟,等.新型海上风力发电及其关键技术研究[J].能源研究与信息,2010,26(2):110-116.
GAO Kun, LI Chun, GAO Wei,etal. New-type floating offshore wind power generation and its key technology research[J]. Energy Research and Information, 2010,26(2):110-116.
[7]李春,叶舟,高伟,等. 现代陆海风力机计算与仿真[M]. 上海:上海科学技术出版社,2012:510-512.
[8]王景全,陈政清. 试析海上风机在强台风下叶片受损风险与对策——考察红海湾风电场的启示[J]. 中国工程科学,2010,12(11):32-34.
WANG Jingquan, CHEN Zhengqing. Analysis of risks and measures on the blade damage of offshore wind turbine during strong typhoons—enlightenment from Red Bay wind farm[J]. Engineering Science, 2010,12(11):32-34.
[9]宋丽莉,毛慧琴,钱光明,等. 热带气旋对风力发电的影响分析[J]. 太阳能学报,2006,27(9):961-965.
SONG Lili,MAO Huiqin,QIAN Guangming,etal. Analysis on the wind power by tropical cyclone[J]. Acta Energiae Solaris Sinca, 2006,27(9):961-965.
[10]李德源,刘胜祥,张湘伟. 海上风力机塔架在风波联合作用下的动力响应数值分析[J]. 机械工程学报,2009,45(12):46-52.
LI Deyuan, LIU Shengxiang, ZHANG Xiangwei. Dynamic response numerical analysis of the offshore wind turbine tower under combined action of wind and wave[J]. Journal of Mechanical Engineering, 2009,45(12):46-52.
[11]VELDKAMP H F, TEMPEL J. Influence of wave modelling on the prediction of fatigue for offshore wind turbines[J]. Wind Energy, 2005, 8(1):49-65.
[12]刘强,杨科,黄宸武,等. 漂浮式风力机动态响应特性研究[J]. 工程热物理学报,2013,34(7):56-62.
LIU Qiang, YANG Ke, HUANG Chenwu,etal. Study on the dynamic response of floating wind turbines[J]. Journal of Engineering Thermophysics,2013, 34(7):56-62.
[13]BULDER B H. Study to feasibility of and boundary conditions for floating offshore wind turbines[R]. Neitherlands: [s.n.], 2002.
[14]HENDERSON A R, PATEL M H. On the modeling of a floating offshore wind turbine[J]. Wind Energy,2003,6(1):53-86.
[15]JONKMAN J M. Dynamics modeling and loads analysis of an offshore floating wind turbine[R]. [S.l.]: National Renewable Energy Laboratory, 2007.
[16]张社荣,黄虎. 海上张力腿平台风电机组结构动力特性研究[J]. 太阳能学报,2010,31(9):1198-1203.
ZHANG Sherong, HUANG Hu. Structural dynamic analysis of offshore wind turbine with tension leg platform[J]. Acta Energiae Solaris Sinica, 2010,31(9):1198-1203.
[17]成欣,叶舟,周国龙,等. 漂浮式风力机平台在不同水深下的响应特性分析[J]. 水资源与水工程学报,2014,25(4):97-104.
CHENG Xin, YE Zhou, ZHOU Guolong,etal. Analysis on response performance for floating wind turbine platforms under different water depth[J]. Journal of Water Resources and Water Engineering, 2014, 25(4):97-104.
[18]高月文,李春,叶舟,等. 风波流多环境海上风力机张力腿平台动态特性[J].水资源与水工程学报,2014,25(2):91-98.
GAO Yuewen, LI Chun, YE Zhou,etal. Dynamic characteristics of wind turbine tension leg platform for multi-environment of wind wave current above sea[J]. Journal of Water Resources and Water Engineering,2014,25(2):91-98.
[19]ROBERSTON A N, JONKMAN J M. Loads analysis of several offshore floating wind turbine concepts [C]//International Society of offshore and Polar Engineers 2011 Conference.Hawaii,USA: [s.n.], 2011.
[20]JONKMAN J M, MATHA D. A quantitative comparison of the response of three floating platforms [C]//European Offshore Wind 2009 Conference and Exhibition.Stockholm, Sweden: [s.n.], 2009.
[21]KELLY N D, SHIRAZI M, JAGER D,etal. Lamar low-level jet project interim report[R]. [S.l.]:National Renewable Energy Laboratory, 2004.
[22]安利强,孙少华,周邢银. 风波联合作用下5 MW海上风力机的疲劳载荷特性分析[J]. 可再生能源,2014,32(7):66-73.
AN Liqiang, SUN Shaohua, ZHOU Xingyin. Fatigue load characteristic analysis of 5 MW offshore wind turbine under combined wind and wave loads[J]. Renewable Energy Resources, 2014,32(7):66-73.
[23]JONKMAN J M. Dynamics modeling and loads analysis of an offshore floating wind turbine [D].Boulder, CO, USA: University of Colorado, 2007.
[24]JONKMAN J M, BUHL M L,Jr. FAST user's huide[R]. London,UK: National Renewable Energy Laboratory, 2005:1-34.
Comparison of Dynamic Response Between Stationary and Floating Wind Turbines
DINGQinwei1,LIChun1,2,ZHOUGuolong1,YEZhou1,2
(1. School of Energy and Power Engineering, University of Shanghai for Science and Technology,Shanghai 200093, China; 2. Shanghai Key Laboratory of Multiphase Flow and Heat Transfer in Power Engineering, Shanghai 200093, China)
Abstract:Considering wave loads, the dynamic responses of stationary and floating wind turbine platforms and relevant flexible components were studied by taking the measured data of NREL as the source of turbulent wind field and the NREL 5 MW wind turbine as a prototype. Results show that the movements of above platforms are mainly in surge, pitch and yaw directions; the in-plane moment and out-of-plane force at blade root of floating wind turbines are bigger than that of stationary wind turbines; for floating wind turbines, the shear force in surge direction of tower top and tower base and the pitching moment of tower base are three times as much as that of stationary wind turbines; the acceleration at tower top of floating wind turbines presents the characteristics of high frequency and large span.
Key words:wind turbine; turbulent wind; wave; dynamic response; force and moment
文章编号:1674-7607(2016)01-0065-09
中图分类号:TK83
文献标志码:A学科分类号:480.60
作者简介:丁勤卫(1990-),男,山东济宁人,硕士研究生,研究方向为风力发电.
基金项目:国家自然科学基金资助项目(E51176129);上海市教育委员会科研创新(重点)资助项目(13ZZ120,13YZ066);教育部高等学校博士学科点专项科研基金(博导)资助项目(20123120110008);上海市科委资助项目(13DZ2260900)
收稿日期:2015-03-11
修订日期:2015-04-24
李春(通信作者),男,教授,博导,电话(Tel.):18301928952;E-mail:Lichunusst@163.com.
猜你喜欢
学苑创造·A版(2022年4期)2022-06-18 11:22:44
测控技术(2021年10期)2021-12-21 07:10:24
当代陕西(2020年24期)2020-02-01 07:06:46
小哥白尼(趣味科学)(2018年12期)2018-12-18 02:13:58
测控技术(2018年5期)2018-12-09 09:04:38
少儿美术(快乐历史地理)(2018年3期)2018-09-25 02:49:48
电测与仪表(2015年8期)2015-04-09 11:50:06
振动工程学报(2015年1期)2015-03-01 01:15:46
太阳能(2015年6期)2015-02-28 17:09:35
中国航海(2014年1期)2014-05-09 07:54:24