
160 km/h有砟铁路轨道控制网建立新方法研究
2016-04-13 03:32颜廷祥
铁道勘察 2016年1期
颜廷祥
(中铁工程设计咨询集团有限公司,北京 100055)
160 km/h有砟铁路轨道控制网建立新方法研究
颜廷祥
(中铁工程设计咨询集团有限公司,北京100055)
160 km/h Ballasted Railway Track Control Network Establish Research New Methodologies
YAN Tingxiang
摘要在160 km/h标准铁路建设中,规范要求将轨道控制网(CPⅢ)布设在路肩,并采用导线方式建网,这种做法存在点位容易破坏、设站精度较低、使用不方便等弊端。提出基于抱箍方式进行“之”字形CPⅢ建网的方法。通过工程实践验证,该方法具有操作简便、设站精度高、使用方便、易于推广等特点,可以在160 km/h新建或既有运营铁路的建网工作中推广应用。
关键词抱箍轨道控制网(CPⅢ)平面精度高程精度
1概述
在铁路建设阶段,轨道线形的平顺性是依据轨道控制网(CPⅢ),通过轨道精调来实现;在运营期间,轨道线形的平顺性也是依据轨道控制网(CPⅢ),通过相应轨道精调来维持。因此,轨道控制网(CPⅢ)建立与维护是保证轨道平顺性重要因素。
2160 km/h轨道控制网(CPⅢ)现状
目前,我国铁路建设按设计时速标准区分为三个层次:250km/h~350 km/h高速铁路、200 km/h客货共线有砟铁路以及160 km/h及以下铁路。对于200 km/h及以上铁路,其轨道控制网(CPⅢ)的建设已有明确的规范规定,整体已经比较成熟;而160 km/h及以下铁路,规范要求轨道控制网(CPⅢ)采用导线方式布设,导线点间距为150~200 m。采用导线法有以下弊端:①测量作业时需进行对中,相比自由设站,对中会占用较多的时间,且会引起对中误差。在运营期,各种测量作业都需在天窗时间内完成,且每次天窗时间又较短,若因对中而增加每站的测量时间,会造成时间上不必要的浪费并影响作业效率。②导线点直接埋设在路肩,点位极易被破坏和遮挡,任何点的破坏都会造成该点处无法进行全站仪设站,从而影响轨道测量作业。
现阶段,我国铁路工务部门也正因为“天窗较短,效率较低”而无法快速进行铁路养护,亟需尽快通过技术创新、装备创新提升线路养护的效率和质量。不久的将来,我国铁路工务系统也会逐步实现“边测量边捣固”的模式,而导线点埋设在路肩,无法为这种模式提供有效的控制基准。160 km/h的轨道控制网(CPⅢ)若按照点对建立,则会造成在接触网杆上设置CPⅢ点多、测量精度要求高、费用也较高等问题。
鉴于以上诸多弊端,引入自由设站的理念,并为后期自动化养护作业奠定基础,从精度、效率、经济性及使用便利性等角度综合考虑,提出160 km/h铁路采用基于抱箍方式的“之”字形轨道控制网(CPⅢ)建网方式。
3“之”字形轨道控制网(CPⅢ)点位的埋设
在桥梁及隧道地段,采用常规的钻孔预埋件方式;在路基地段,为兼顾点位稳定性及埋设便利性、经济性,提出采用抱箍电气化杆预埋件的方式;点位构成“之”字形CPⅢ控制网,相比点对形式的CPⅢ控制网,埋点数量减少一半。
3.1“之”字形CPⅢ点位的布设要求
CPⅢ布网的技术要求如表1。

表1 CPⅢ控制网基本要求
3.2基于抱箍方式的点位埋设
根据电气化杆的类型,选用不同的抱箍埋设方式。抱箍件设计尺寸、埋设情况及所用的棱镜如图1、图2及图3所示。

图1 方形及圆形电气化杆抱箍设计尺寸(单位:mm)

图2 方形及圆形电气化杆抱箍现场

图3 抱箍件配套使用的棱镜
3.3编号与标示
CPⅢ点号按照公里数递增进行编号,其点号反映里程数,处于线路里程增大方向轨道左侧的CPⅢ编号为奇数,处于线路里程增大方向轨道右侧的CPⅢ编号为偶数,具体如表2所示。特殊地段的CPⅢ埋设应根据实际情况做必要的说明。
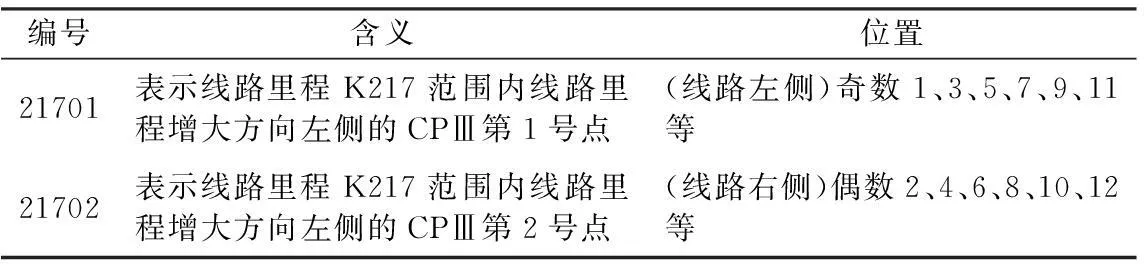
表2 CPⅢ编号
4“之”字形CPⅢ控制网测量及数据处理
4.1“之”字形CPⅢ平面测量
(1)“之”字形CPⅢ控制网测量采用自由测站边角交会的方法,每个自由测站至少观测6个CPⅢ控制点。其间距约为110 m,最远距离不大于180 m。每个CPⅢ控制点至少保证有2个自由测站的方向和距离观测量(见图4)。

图4 CPⅢ平面测量
(2)采用全圆方向观测法进行观测,距离观测采用多测回距离观测法。在每站观测时,需进行温度和气压改正。
(3)CPⅢ平面控制网每隔1 km左右联测一个CPⅠ点、CPⅡ点或加密CPⅡ点。与上级控制点联测时,至少通过两个或两个以上自由测站进行联测,如图5所示,联测时观测视距小于300 m。

图5 与CPⅡ加密点联测示意
(4)CPⅢ需要分段测量时,相邻区段间需重叠6个CPⅢ点,区段之间搭接处需进行约束平差。
4.2“之”字形CPⅢ高程测量
采用与平面测量同时进行的自由测站三角高程测量方法。外业观测完成后,将三角高程观测值组合成如图6所示的高差闭合环,并进行环闭合差检查。使用水准仪将水准加密点高程联测到附近的CPⅢ点上,以形成附合于高程控制点的路线,附合路线长度不大于3 km。

图6 自由测站三角高程网示意
4.3“之”字形CPⅢ观测技术要求
(1)平面测量
采用全圆方向观测法进时,水平方向观测应满足表3的规定。
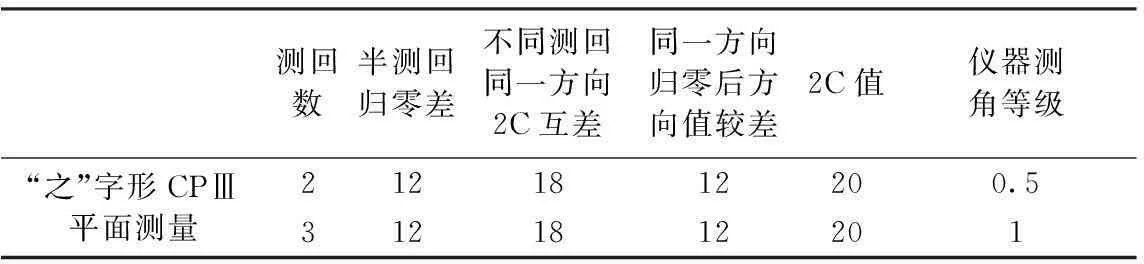
表3 水平方向观测的技术规定 (″)
距离观测应满足表4的规定。

表4 距离观测的技术规定 mm
(2)高程测量
除满足平面测量的要求外,还应满足表5的规定。

表5 自由设站三角高程外业观测主要技术规定
4.4“之”字形CPⅢ数据处理
(1)平面数据处理
外业观测数据质量检核合格后,以联测的CPⅡ加密点为起算数据,进行自由网和约束网平差计算,自由网平差及约束网平差主要技术要求如表6及表7所示。

表6 自由网平差主要技术规定

表7 约束网平差主要技术规定
区段衔接时,需比较相邻区段独立平差重叠点的坐标差值,坐标较差满足≤±6 mm时,后一区段采用本区段联测的CPⅠ点、CPII点或加密CPⅡ点及重叠段前一区段连续的1~3个CPⅢ网点作为约束点进行平差计算。平差后,其余未约束的重叠CPⅢ点在前后区段坐标差值满足≤±1.5 mm时,坐标成果采用上一区段成果。
(2)高程数据处理
统计环闭合差和附合路线闭合差,计算每km高差偶然中误差和每km高差全中误差。参照四等水准测量要求,高程指标应符合表8的技术要求。

表8 CPⅢ高程测量数据处理的精度规定 mm
注:表中L为往返测段、附合或环线的水准路线长度/km。
三角高程网采用联测的加密高程控制点进行约束平差,平差后各项精度指标要求见表9。

表9 高程测量平差后的精度要求
区段衔接时,前后区段独立平差后重叠点高程差值应≤±6 mm。满足要求以后,后一区段应采用本区段的起算点及重叠段前一区段连续的1~2个高程成果进行约束平差计算。
5工程实例
按照上述方法,在某160 km/h的新建铁路上进行建网作业,并选用其中一段5 km长的CPⅢ原始观测数据进行计算及数据分析。建网作业时,采用标称精度±1″及±(1+1×10-6D)mm的全站仪,CPⅡ网点纵向间距1 000 m左右。
5.1平面精度统计
经过平差计算,平面精度统计如表10及表11所示。

表10 自由网平差结果精度指标统计

表11 约束网平差结果精度指标统计
5.2高程精度统计
经过平差计算,该段数据每km水准测量全中误差为1.88 mm,高差改正数的最大值为0.77 mm,平差后相邻点高差中误差的最大值为0.62 mm。
如上所示平面及高程精度统计可以看出,采用本文所述方法进行“之”字形CPⅢ建网,各项精度指标已达到160 km/h铁路建网设计的精度要求。
6结论
(1)采用抱箍方式进行点位布设,埋设方式简单,点位稳定,且节约了单独设置预埋桩柱的费用,适合在160 km/h新建有砟铁路及运营有砟铁路广泛应用。
(2)利用本文方法进行平面和高程观测,平差后各项精度指标满足设计精度要求,可用于指导轨道的维护。
(3)“之”字形CPⅢ网,相比导线形式,点位密度大,设站更方便,多余观测值更多,精度和可靠性更强;相比点对形式CPⅢ,点位数量减少一半,点位布设成本降低。因此,这种建网方式更加便于建设期和后续运营期的使用。
参考文献
[1]中华人民共和国铁道部.TB10601—2009高速铁路工程测量规范[S].北京:中国铁道出版社,2010
[2]中华人民共和国铁道部.TB10101—2009铁路工程测量规范[S].北京:中国铁道出版社,2010
[3]武汉大学测绘学院测量平差学科组.误差理论与测量平差基础[M].武汉:武汉大学出版社,2003
[4]刘成龙,杨友涛,徐小左.高速铁路CPⅢ交会网的必要测量精度仿真计算[J].西南交通大学学报,2008(6)
[5]王鹏,刘成龙,杨希.无碴轨道CPⅢ自由设站边角交会网平差概略坐标计算方法研究[J].铁道勘察,2008(3)
[6]曾若飞.铁路有砟轨道自动养护测量系统研究思路探讨[J].铁道勘察,2011(2)
[7]朱宝训,刘成龙,杨天宇.后方交会方法及其精度评定[J].铁道勘察,2004(6)
[8]雷巨光.单轨测量系统在新建有砟铁路轨道粗捣中的应用[J].铁道勘察,2014(1)
[9]王斌,姜春杰,杨保华.CPⅢ平面控制测量网型改进的一种方法研究[J].铁道勘察,2014(4)
中图分类号:U212.24
文献标识码:A
文章编号:1672-7479(2016)01-0004-04
作者简介:颜廷祥(1970—),男,1993年毕业于西南交通大学铁道工程专业,高级工程师。
收稿日期:2015-12-21
