SVPWM原理及逆变技术的仿真研究
2016-04-11 01:25张军凯韩峻峰
计算技术与自动化 2016年1期
张军凯 韩峻峰

摘要:由于传统的正弦波脉宽调制(SPWM:SinusoidalPWM)技术直流母线电压利用率低,谐波成分高等,针对这一问题介绍瞬时空间磁链矢量圆轨迹法(SVPWM:SpaceVectorPWM)技术。首先对SVPWM原理进行了详细的分析,在此基础上确定SVPWM算法实现的基本流程,并将SVPWM技术应用于三相永磁同步电机控制系统中,在SIMULINK中建立整个系统的仿真模型,仿真结果表明SVPWM控制方法能够实现等效正弦电压的输入,为SVPWM控制策略在永磁同步电机调速系统中的应用提供了一定的理论依据。
关键词:SVPWM;永磁同步电机;逆变器;SIMULINK
中图分类号:TM46文献标识码:A
1引言
在永磁同步电机调速系统中,电机电流变化的快慢决定了电机转速和转矩的响应速度。与电流型逆变器相比电压型逆变器更能实现电流的快速变化。目前,使用较多的逆变器控制方式有电流跟踪PWM方式、正弦波脉宽调制SPWM方式、瞬时空间磁链矢量圆轨迹方式(SVPWM方式)[1,2]。电流跟踪PWM方式存在开关频率不固定的缺点,在实现时受到功率开关器件最高开关频率及控制系统响应时间的限制[3]。SPWM是通过平滑的正弦波调制信号与高频三角波载波相比较得到PWM通断信号,二者交汇点确定逆变器的通断时刻,从而产生正弦波,但这种调制方式会产生高次谐波,对于电机控制十分不利[4]。基于SVPWM方式的逆变技术具有转矩波动小,易于数字化编程实现、直流电压的利用率高等优点,目前在逆变器控制中得到了广泛地使用[5]。
本文深入分析了SVPWM的控制策略,并将此方式进行逆变器的开关控制,应用于永磁同步电机的调速控制中,并进行了仿真实验研究。
2SVPWM的原理
瞬时空间磁链矢量圆轨迹法(SVPWM)就是在很短的一段时间间隔内,通过对电压型逆变器的开关状态的线性组合,得到磁链矢量轨迹为圆形的PWM方式[1,2]。SVPWM控制算法的思想是:运用定子磁链空间矢量跟踪的思想,在正弦波永磁同步电机内部空间产生旋转的圆形磁场,从而产生稳定的电磁转矩[6]。
三相逆变器对PMSM供电时,SVPWM技术产生的PWM波控制着三相逆变器的六个开关管的开通与关闭。逆变器结构如图1所示,逆变器由三个桥臂六个开关管组成,为避免短路,逆变器同一个桥臂上的两个电子开关交替导通。将上面开关导通而下面开关断开的状态用1表示,反之用0表示。将开关管V1-V4、V3-V6、V5-V2的通断状态进行组合得八种开关状态。其中有六个为基本电压空间矢量Vl(001)、V2(010)、V3(011)、V4(100)、V5(101)、V6(110)和两个零电压空间矢量V0(000)、V7(111)。
计算技术与自动化2016年3月
第35卷第1期张军凯等:SVPWM原理及逆变技术的仿真研究
采用SVPWM逆变技术时,在平面中的任何一个电压矢量Uout,都可以由6个基本电压空间矢量以及零电压空间矢量根据不同的作用时间叠加合成[7]。从图2中可以发现基本电压空间矢量V1-V6将平面划分为6个扇区。每个扇区对应的时间均为π/3。设某时刻Uout转到某个扇区中,组成此扇区的两个非零电压空间矢量,按照逆时针方向设定为Vn、Vn+1,分别对应的作用时间为T1、T2。TPWM为PWM采样周期。当Uout所处的扇区为n时,Uout就可以通过Vn、Vn+1组合而成。如式(1)所示:
uout=T1TpwmVn+T2TpwmVn+1(1)
Tpwm=T1+T2+T0(2)
其中n为1-6所有的整数;T0零电压矢量的作用时间[8]。在一个SVPWM采样周期内,通过改变基电压矢量的作用时间,使得由基电压矢量合成的矢量大小都相等,那么当TPWM取非常小的值时,则合成的空间电压矢量近似成为一个圆形,这就是SVPWM方式的工作原理。
3SVPWM算法的MATLAB实现
SVPWM的调制原理就是在很短的时间间隔内,通过线性组合电压型逆变器的开关时间,得到圆形的磁链矢量轨迹的PWM方式[1,2]。SVPWM算法的基本流程有三个步骤:一是扇区的判断;二是确定相邻空间电压矢量的作用时间;三是确定开关顺序及电压空间矢量的切换时间,尽量减少开关管的开关次数及开关损耗[9,10]。
3.1电压矢量Uout所处扇区的判断
SVPWM算法是基于两相静止坐标系(αβ坐标系)来实现的,因此在判断扇区时首先要对电压矢量进行坐标变换,得到Uα和Uβ并定义以下变量:
U1=UβU2=32Uα-Uβ2U3=-32Uα-Uβ2(3)
再定义,若U1>0,则A=1,否则A=0;若U2>0,则B=1,否则B=0;若U3>0,则C=1,否则C=0。计算N值为:N=A+2*B+4*C,N值和扇区的关系如表1
3.2合成矢量作用时间的确定
设合成矢量Uout所处的扇区号为Ⅰ时,由图2可知:此时n值为1,合成电压矢量由V1与V2以及零电压空间矢量利用平均等效原则得到,可知Uout×Tpwm=V1×T1+V2×T2在两相静止坐标系α-β中,向α轴和β轴作投影,根据三角函数关系可求得:
Uα=T1V1Tpwm+Uβtan60°Uβ=T2V2Tpwmcos30°(4)
又因为V1=V2=2Udc/3,故可算出T1与T2的值为:
T1=Tpwm2Udc3Uα-3UβT2=3TpwmUdcUβ(5)
X=3TpwmUdcUβY=TpwmUdc32Uα+32UβZ=TpwmUdc-32Uα+32Uβ(6)
式(6)为求取基本空间电压矢量开关作用时间的中间变量,在不同扇区,T1和T2与中间变量X、Y、Z关系如下表endprint
表2T1和T2与中间变量X、Y和Z的关系
T1、T2赋值后还要对其进行饱和判断。当T1+T2>Ts,则取T1=T1*Ts/(T1+T2),T2=T2*Ts/(T1+T2)。
3.3确定开关顺序及电压空间矢量的切换时刻
上述已经得到任意方向电压空间矢量实现所需要的基本电压空间矢量作用时间的PWM波形,进一步讨论如何在数字信号处理器的PWM模块中实现。定义下面三个式子:
taon=T-T1-T24tbon=taon+T12tcon=tbon+T22(7)
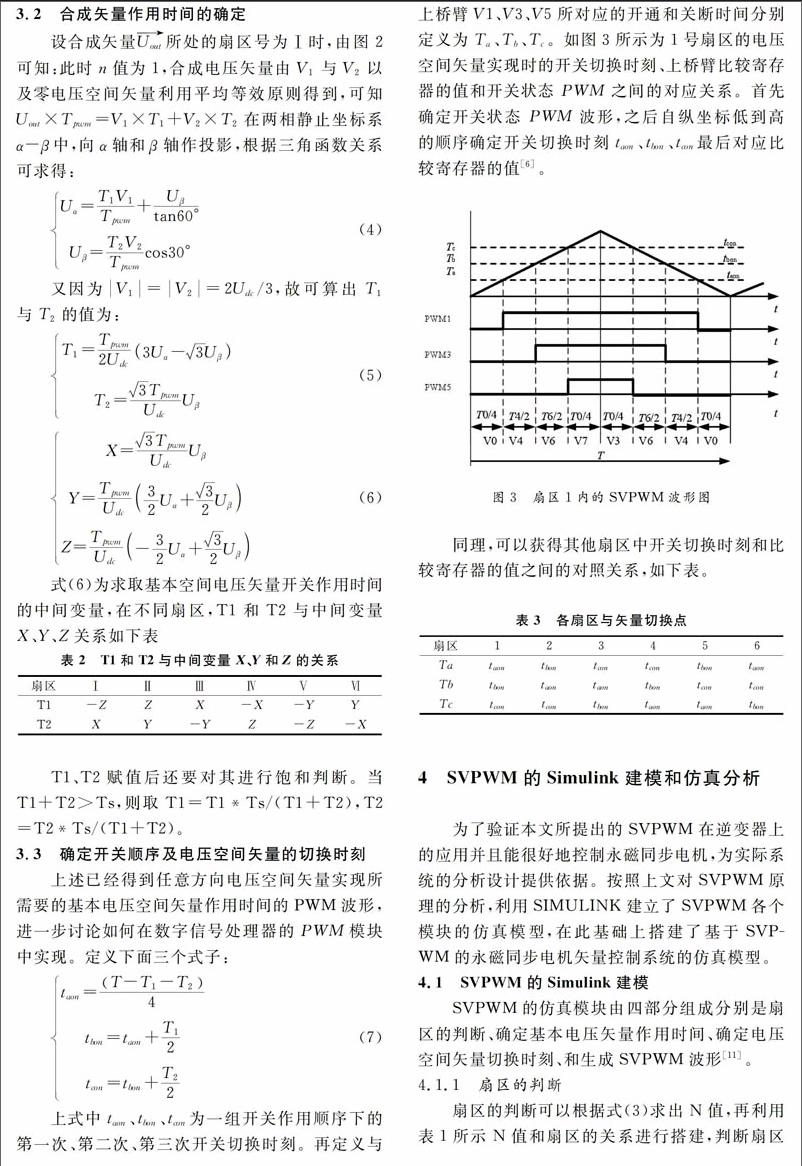
上式中taon、tbon、tcon为一组开关作用顺序下的第一次、第二次、第三次开关切换时刻。再定义与上桥臂V1、V3、V5所对应的开通和关断时间分别定义为Ta、Tb、Tc。如图3所示为1号扇区的电压空间矢量实现时的开关切换时刻、上桥臂比较寄存器的值和开关状态PWM之间的对应关系。首先确定开关状态PWM波形,之后自纵坐标低到高的顺序确定开关切换时刻taon、tbon、tcon最后对应比较寄存器的值[6]。
同理,可以获得其他扇区中开关切换时刻和比较寄存器的值之间的对照关系,如下表。
4SVPWM的Simulink建模和仿真分析
为了验证本文所提出的SVPWM在逆变器上的应用并且能很好地控制永磁同步电机,为实际系统的分析设计提供依据。按照上文对SVPWM原理的分析,利用SIMULINK建立了SVPWM各个模块的仿真模型,在此基础上搭建了基于SVPWM的永磁同步电机矢量控制系统的仿真模型。
4.1SVPWM的Simulink建模
SVPWM的仿真模块由四部分组成分别是扇区的判断、确定基本电压矢量作用时间、确定电压空间矢量切换时刻、和生成SVPWM波形[11]。
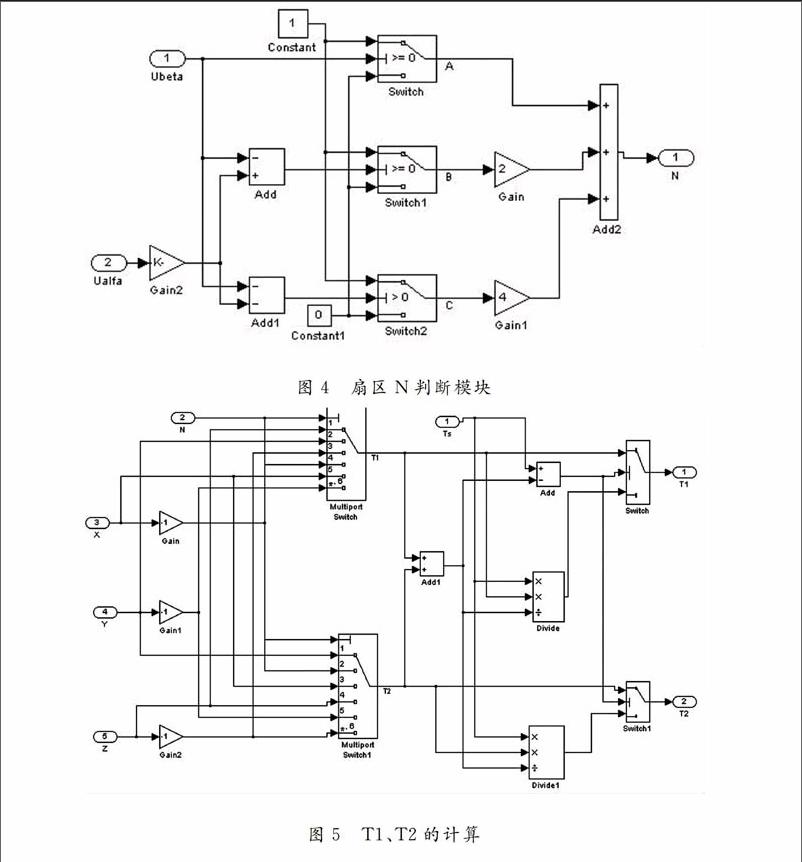
4.1.1扇区的判断
扇区的判断可以根据式(3)求出N值,再利用表1所示N值和扇区的关系进行搭建,判断扇区的模型如图4所示。
4.1.2计算相邻矢量作用时间
T1、T2计算模块可以根据式(5)、(6)求出中间变量X、Y、Z,再利用表2中T1和T2与中间变量之间的关系进行搭建,具体如图5所示。4.1.3确定电压矢量切换时间
计算电压矢量切换时间Ta、Tb、Tc的模块可以根据式(7)及表3进行搭建,具体如图6所示。
4.1.4生成SVPWM波
SVPWM波可以由等腰三角波与计算得到的Ta、Tb、Tc值相比较,将两者之间的差值二值化为1和0可得到三路PWM信号。将这三路信号进行类型转换和取反操作转化为双进度类型可以得到另外三路空间矢量PWM信号。具体如图7所示。
4.2仿真结果
根据SVPWM的原理和逆变技术建立了基于SVPWM的id=0矢量控制策略下的永磁同步电机电流速度双闭环仿真模型,如图8所示。电机的本体参数为:所用电机的额定功率是2.2KW,定子电阻Rs=1.8Ω,永磁体磁链值为0.55Wb,直、交轴的电感Ld=Lq=0.012H,转动惯量J=0.0154Kg.m2极对数p=2摩擦系数为0.005,直流母线电压为540V。电机在空载情况下启动,设定电机转速为1500转每分钟,0.2s时突加20N·m的负载。图9为电压矢量扇区N的图形。逆变器输出的线电压Ua波形如图10所示,电机转速波形如图11所示,转矩波形如图12所示。从图11中可以看出应用SVPWM技术的永磁同步电机在给定转速下可以快速启动,在0.05s即达到稳定状态,在0.2秒时由于增加负载使得转速有微小波动,略有下降,但很快恢复到稳定转速。由以上分析可知,本文提出的在逆变器中应用SVPWM控制算法,在永磁同步电机控制中系统转速响应快,跟踪能力强且稳定无误差,在突加负载时,系统能够快速的调整从而达到新的稳态,动态性响应快,稳态性能良好。
5总结
详细阐述了瞬时空间磁链矢量圆轨迹(SVPWM)的实现原理及逆变技术,明确了SVPWM算法实现的基本流程。在此基础上建立了SVPWM的仿真建模及永磁同步电机控制系统的模型并对其结果进行了分析。仿真结果表明了SVPWM控制方法能够实现等效正弦电压的输入,仿真结果为SVPWM控制策略在永磁同步电机调速系统中的应用提供了一定的理论依据。
参考文献
[1]李珍国.交流电机控制基础[M].北京:化学工业出版社,2010:62-67.
[2]王成元,夏加宽,孙宜标.现代电机控制技术[M].北京:化学工业出版社,2009:22-26.
[3]周卫平,吴正国,唐劲松,等.SVPWM的等效算法及SVPWM与SPWM的本质联系[J].中国电机工程学报,2006,26(2):133-137.
[4]李涛,张晓锋,乔鸣忠.SPWM与SVPWM的宏观对等性研究[J].中国电机工程学报,2010,30(1):178-184.
[5]陈娟,何英杰,王新宇,等.三电平空间矢量与载波调制策略统一理论的研究[J].中国电机工程学报,2013,33(09):71-78.
[6]刘红伟.永磁同步电机控制策略及算法融合研究[D].北京:中国科学院大学,2014.
[7]荆建立.两相SVPWM原理及经典两相SVPWM算法[J].电机技术,2008(4):8-10.
[8]翟程远.永磁同步电机矢量控制的研究及应用[D].上海:上海交通大学,2013.
[9]理文祥,王庆贤,葛莲.SVPWM的算法及仿研究[J].变频器世界,2011(04):67-70.
[10]郎宝华,刘卫国,周熙炜,等.空间矢量脉宽调制的仿真研究及应用[J].电机与控制应用,2007,34(08):6-10.
[11]周恒.基于空间矢量PWM控制的永磁同步电机驱动系统的研究[D].广州:华南理工大学,2014.
第35卷第1期2016年3月计算技术与自动化ComputingTechnologyandAutomationVol35,No1Mar.2016第35卷第1期2016年3月计算技术与自动化ComputingTechnologyandAutomationVol35,No1Mar.2016endprint
猜你喜欢
汽车工程学报(2016年5期)2017-01-16
计算技术与自动化(2016年4期)2017-01-11
现代电子技术(2015年18期)2015-09-16