
坡耕地运输车爬坡性能
2016-04-11 17:20孟长伊庄丽娜杨海天李广宇
江苏农业科学 2016年2期
孟长伊++庄丽娜+++杨海天+++李广宇
摘要:分析了不同分类下的坡耕地机械使用界限及特性。对四轮、两轮、履带型、六轮型运输车的爬坡性能进行了比较,计算了4种运输车的推力系数。通过推力比,求出不同类型运输车在不同情况下的爬坡极限角,并对它们的爬坡性能进行了推算。
关键词:坡耕地;爬坡;性能
中图分类号: S222.5文献标志码: A文章编号:1002-1302(2016)02-0418-02
收稿日期:2015-02-05
基金项目:吉林省农业机械研究院项目(编号:201407001)。
作者简介:孟长伊(1971—),女,吉林长春人,硕士,高级工程师,主要从事农业工程、农业技术研究。E-mail:1006946222@qq.com。坡耕地是指与水平地面呈一定角度的旱耕地。除坡度问题外,坡耕地普遍具有温度低、水利条件差、土壤不良等问题,水土流失严重[1]。因此,坡耕地农业普遍比平地农业的劳动生产率低,因作业种类不同而异,其中运输作业的效率最低,劳动强度也明显增大。通用型手扶拖拉机在安全、操纵、爬坡性能上是不完善的,近年来,开发专用坡耕地机械已成为中国农业工程界的研究重点。目前出现了坡耕地专用运输机械,性能也在不断提高;但目前国内有关坡耕地机械的研究较少,相关产品的研发还处于起步阶段。国外有关坡耕地机械的研究处于前沿,向全功能、微型化方向发展,以意大利Ferrari系列微型拖拉机为代表。因此,配合目前的农艺模式,研究易操作、稳定性好、爬坡能力强的坡耕地专用运输车,具有重要意义[2]。本研究针对坡耕地运输车在不同角度、地况上的爬坡性能进行理论探讨,以期为研发专用坡耕地运输车提供参考。
1坡耕地分类和坡度界限
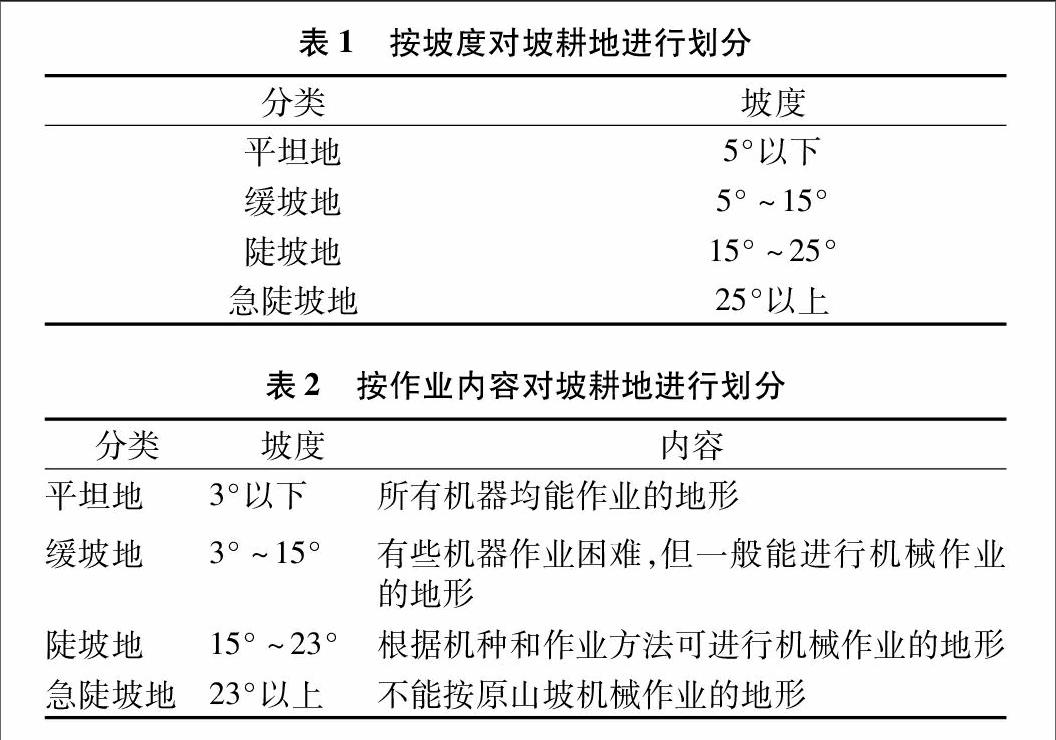
根据目前坡耕地生产的农艺要求,按照不同情况对坡耕地进行划分(表1、表2)。
分类坡度内容平坦地3°以下所有机器均能作业的地形缓坡地3°~15°有些机器作业困难,但一般能进行机械作业的地形陡坡地15°~23°根据机种和作业方法可进行机械作业的地形急陡坡地23°以上不能按原山坡机械作业的地形
平地农业机械在坡耕地利用界限见表3;不同耕作方式下坡耕地用农机作业坡度界限见表4。
表3平地农业机械在坡耕地利用界限
分类坡度内 容14°以下和平地一样进行作业24°~8°机器性能稍有下降,熟练的操作者可用平地机器进行作业38°~12°须要对平地机器进行改装,且需要熟练的操作者才能进行作业412°以上利用平地机器有困难。机器须要改装,有时还要设置坡地用特殊装置
表4不同耕作方式下坡耕地用农机作业坡度界限
耕作方式作业机种坡度界限犁耕犁6°以上时不易完全翻转圆盘犁耕偏置圆盘耙、重型耙超过7°时效率降低旋耕手扶式旋耕机(牵引式)沿等高线方向的作业界限为6°,6°以上按爬坡、下坡方向牵引,但功效显著下降旋耕机(悬挂式)15°左右则作业困难
2坡耕地运输的特性分析
2.1坡地上机械的特性
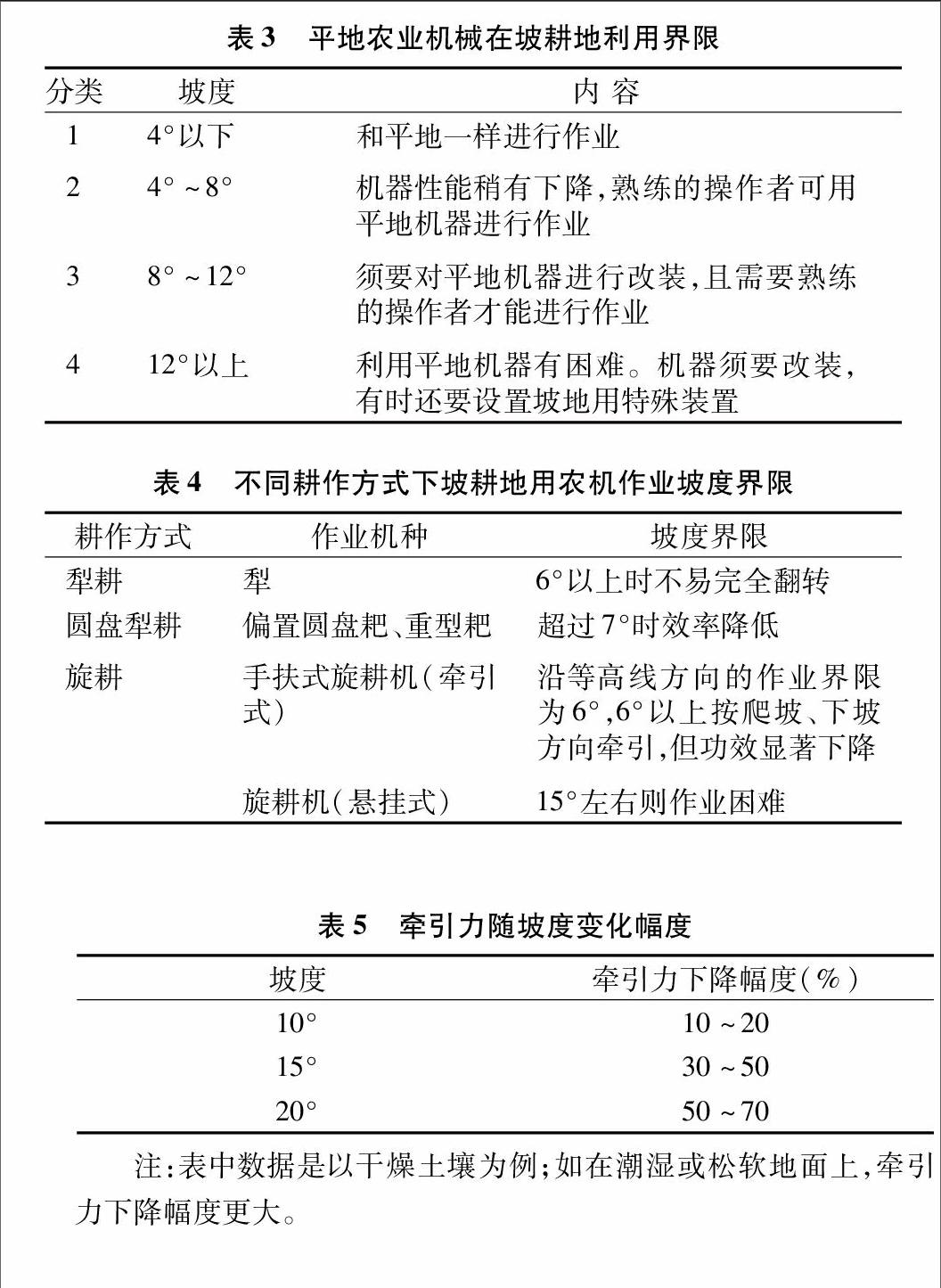
在坡地上作业的农业机械以轮式、连续作业为主,牵引力小。根据调研结果,实地耕作都是按农艺要求,采用等高线方向作业,作业时的主要问题是拖拉机的横向侧翻,关于该问题已经进行了很多研究[3]。在较硬土地上试验时,随着地面坡度增大,牵引力下降(表5)。
表5牵引力随坡度变化幅度
坡度牵引力下降幅度(%)10°10~2015°30~5020°50~70注:表中数据是以干燥土壤为例;如在潮湿或松软地面上,牵引力下降幅度更大。
2.2特性分析
由于机体倾斜,坡下侧和坡上侧驱动轮上的质量分配不等,因而减少推进力。在坡地上车轮的横向滑移一直是难以解决的问题。为使拖拉机沿等高线方向前进,须要计算运输车的机体偏角和前轮操舵角。把车轮上一部分推进力变成行走阻力,防止横向滑移[4];沿上坡、下坡方向作业时利用从行走装置中产生的推进力来克服行走阻力。
3.3橡胶履带运输车或多轮型运输车
履带型运输车和六轮车一样,由于重心位置不同,推力系数也随之不同。其稳定性尤其重要,容易发生滑移和侧翻,在平地履带型车的极限推力系数为0.74以下,六轮驱动车的极限推力系数在0.86以下,说明它较适合在松软地使用。近年来,有学者进行履带式微型拖拉机的研究,采用机、电、液一体化技术,设计了液压调平装置,使履带式运输车的爬坡极限得到提高,最高可达23.9°[6]。
4结语
本研究表明,在10 ℃以下坡地可以使用行驶速度高、价格便宜的平地拖拉机作为运输工具;在10°~20°坡地宜用坡地用乘用型运输车;在20°以上的超陡坡应考虑应用无人驾驶运输。在10°~20°坡地,采用四轮驱动可充分发挥其爬坡性能。对于橡胶履带型车和六轮驱动车,通过附加配质量使车辆接地压力分布均匀,来设定机体的荷质量分配,则其推力系数比四轮驱动型车大。必须注意的是,θ0是根据车轮的推进力计算出的爬坡极限角,有时即使在θ0以下的坡度,有些车辆也会出现侧翻。
参考文献:
[1]姜心禄,池忠志,李旭毅,等. 发展丘陵山地农机化存在的问题与对策[J]. 中国农机化,2012(6):12-14.
[2]张娟利,师帅兵. 拖拉机行走机构的研究现状[J]. 农机化研究,2010,5(5):243-246.
[3]杨罗成. 农用运输车车架动静态有限元分析[D]. 兰州:甘肃农业大学,2008.
[4]高斯. 车辆动力学稳定系统仿真及优化[D]. 武汉:华中科技大学,2006.
[5]张战文. 微型履带山地拖拉机稳定性能研究[D]. 杨凌:西北农林科技大学,2011.
[6]董新建. 履带车辆行动部分动力学分析与仿真[D]. 长沙:湖南大学,2007.孙爱东,尹令,石凯歌,等. 基于RFID的群养种鹅个体产蛋记录方法[J]. 江苏农业科学,2016,44(2):420-423.
猜你喜欢
当代陕西(2021年13期)2021-08-06
当代工人(2020年1期)2020-05-11
家庭影院技术(2019年8期)2019-08-27
水利规划与设计(2016年10期)2017-01-15
国际木业(2016年10期)2016-12-21
燕山大学学报(2015年4期)2015-12-25
中国塑料(2015年4期)2015-10-14
中国水利(2015年24期)2015-04-25
水土保持通报(2014年5期)2014-06-09
火炸药学报(2014年1期)2014-03-20
