
基于GPS/INS和线控转向的农业机械自动驾驶系统
2016-04-09 03:16蔡骏宇陶昌岭王利明江苏大学汽车与交通工程学院镇江212013
农业工程学报 2016年1期
刘 军,袁 俊,蔡骏宇,陶昌岭,王利明,程 伟(江苏大学汽车与交通工程学院,镇江212013)
基于GPS/INS和线控转向的农业机械自动驾驶系统
刘军,袁俊,蔡骏宇,陶昌岭,王利明,程伟
(江苏大学汽车与交通工程学院,镇江212013)
摘要:研究旨在设计出一套农用车辆自动导航控制系统,让机器人代替农民进行田间作业,实现农用车辆自动驾驶,从而可以有效提高农业机械的作业精度、生产效率和使用安全性,并且为精细农业研究提供技术支持,改善农业生产的方法。该文通过GPS/INS(global positioning system/ inertial navigation system)组合导航技术实时获得载体的导航信息(位置、速度、航向、姿态),根据导航信息与预设轨迹参数计算出载体的目标前轮转向角,并以该目标前轮转向角与当前前轮转角的差值作为控制输入,实现对转向执行电机的精确控制,从而实现载体的路径跟踪控制。同时对整个系统的软硬件进行设计,并对系统控制策略进行仿真和试验验证。最终结果表明,本文所设计的组合导航系统定位精度高,其定位精度可达到0.1~0.5 m;路径跟踪系统误差小,当车速分别为0.5 m/s和1 m/s时,路径跟踪的最大横向误差分别为0.16 m和0.27 m;整个系统响应速度快,可达到0.1s。通过将GPS/INS组合导航技术与线控转向技术相结合,能够实现农用车辆的自动驾驶。
关键词:农业机械;机器人;控制系统;GPS/INS;组合导航;路径跟踪;线控转向
刘军,袁俊,蔡骏宇,陶昌岭,王利明,程伟.基于GPS/INS和线控转向的农业机械自动驾驶系统[J].农业工程学报,2016,32(01):46-53.doi:10.11975/j.issn.1002-6819.2016.01.006 http://www.tcsae.org
Liu Jun, Yuan Jun, Cai Junyu, Tao Changling, Wang Liming, Cheng Wei.Autopilot system of agricultural vehicles based on GPS/INS and steer-by-wire[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2016, 32(01): 46-53.(in Chinese with English abstract)doi:10.11975/j.issn.1002-6819.2016.01.006 http://www.tcsae.org
0 引言
农业是一个国家经济发展水平的标志,我国一直在寻找改善农业生产的方法,促进我国国民经济的发展[1]。目前,欧洲、美国和日本等一些国家较早地对农用车辆路径跟踪控制技术进行了研究,尤其是在导航控制、导航定位等方面,但这些研究主要集中在单一的GPS或惯性导航技术在车辆导航中的应用上[2-4]。GPS导航系统有全天候作业、定位精度高、速度快等优点,但也存在其固有的缺点,如复杂环境可靠性差,数据输出频率低,信号抗干扰能力差等;惯性导航的信息连续性好、噪声低、不易受外界干扰,短期精度和稳定性好,但该系统存在累积误差,定位精度会随时间增长而降低[5-7]。本文主要针对车载导航控制系统进行研究,开发出了一套基于GPS/INS(global positioning system/ inertial navigation system)组合的车载导航控制系统,可以实现全天候、高精度、高可靠性和低成本的车载导航。
1 系统工作原理
本文设计的农用车自动驾驶系统取消了传统的转向执行机构,采用电子控制单元代替方向盘和转向轮之间的机械连接,摆脱了机械转向系统的局限性[8]。将捷联式惯性导航和GPS导航以松耦合的方式组合在一起,同时采用卡尔曼滤波技术对INS和GPS数据进行融合,从而获得优于单一子系统的位置、速度和姿态信息[9-11]。上位机将位置、速度、姿态等信息通过CAN(controller area network)总线发送给主控制器。主控制器根据实时接收的各类信号,对车辆的行驶姿态进行识别,并根据相应的路径跟踪控制策略计算出目标前轮转角,控制转向执行电机使其快速、准确地达到目标转角。最终完成车辆的跟踪定位,实现了农用车自动驾驶功能。
2 系统硬件设计
本文所设计的自动驾驶系统主要包括了以下子系统:组合导航系统、路径跟踪系统、转向执行系统。其中组合导航系统实时获得车辆运行状态、位置信息;路径跟踪系统根据载体运行参数确定载体目标前轮转角;主控制器根据载体目标前轮转角与当前前轮转角的差值实现对转向执行电机的精确控制。整个系统硬件架构如图1所示:
2.1车载感知单元硬件设计
根据车载感知单元的测量精度、系统体积及功耗等因素要求,最终选择的传感器模块为运动处理组件MPU-6050,它集成有3轴陀螺仪与加速度计[12];选择的微处理器模块为STM32F103T8U6。
MPU-6050传感器模块采集的信号先经过调理电路进行处理,然后通过微处理模块的A/D转换实现对传感器信号的采集。考虑到信号的抗干扰性及对芯片的限压保护,所以在调理电路的设计中加入了RC(resistancecapacitance circuits)滤波、电压调节、限压保护等功能。微处理器根据姿态解算算法对传感器模块采集的数据进行处理,获得最优姿态角估计值,并将其以串口的形式输出。其实物如图2所示:
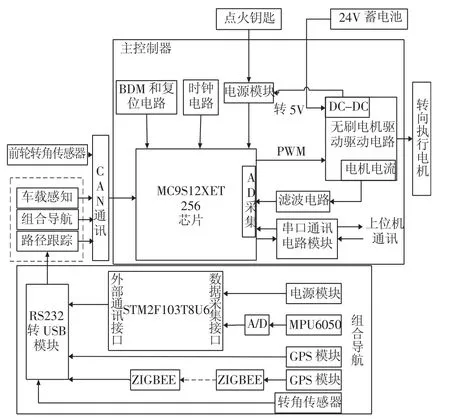
图1 系统硬件架构Fig.1 Overall system hardware design

图2 车载状态感知单元Fig.2 Vehicle perception unit
2.2GPS模块
根据差分GPS定位原理:由基准站已知精密坐标,计算出基准站到卫星的距离改正数,并由基准站实时地将这一改正数发送给流动站。流动站不但接收GPS信号,同时也接收基准站的改正数,并对其定位结果进行改正,提高定位精度。所以本系统采用两组GPS模块,一组作为基准站,一组作为流动站。鉴于流动站需要随车实时采集数据,所以两组GPS模块之间选择通过ZigBee实现无线传输。本文所采用GPS模块为BD-126模块,GPS模块和ZigBee模块均采用5V直流电源进行供电。其实物如下图3所示:

图3 GPS模块Fig.3 GPS Modules
2.3主控制器设计
主控制器需要采集传感器信号来实现对直流无刷电机驱动电路的控制,从而控制转向执行电机。根据系统的实际需要,本文基于飞思卡尔MC9S12XET256芯片设计了转向系统的电控单元[13],主要包括:单片机最小系统、直流无刷电机驱动电路、滤波电路、CAN总线通讯电路、串口通讯模块等。
本文所设计的主控制器电源模块采用SCM6716芯片,其具有电源DC-DC功能,将车载24V电压转换为5V电压对元器件供电。同时该芯片具有I/O口驱动,20号引脚用来控制直流无刷电机的使能、21号引脚用来控制刹车、19号引脚控制电机转向。直流无刷电机的调速则由主控制器输出的PWM(pulse width modulation)波经过两路的D/A调节电路实现,根据PWM的占空比控制电压以达到直流无刷电机调速的目的。
信号输入滤波电路主要是对转向执行电机的电流传感器信号进行调理,电流传感器采集的信号先经过滤波电路处理将电压控制在0~5 V的范围内,然后通过控制芯片A/D转换实现对传感器信号的采集。调理电路的设计需要考虑信号的抗干扰及对芯片的限压保护,所以在电路中加入了RC滤波、电压调节、限压保护等功能。
本文设计了两路CAN总线,车载感知单元采集的车辆运行状态参数、位置参数等经过上位机软件处理后,通过串口转CAN模块发送给线控转向主控制器。CAN控制器集成在主控芯片内,CAN收发器选择TJA1050,电路中加入了ESD(Electro-Static discharge)保护,提高了CAN总线的EMC(electro magnetic compatibility)性能。
主控制器增加了串口通讯模块,用来与上位机进行相关的数据传输。主控制器设计完成后,对其进行相应的硬件在环试验,测试软件的可行性。需要监测的数据通过从单片机的TXD0和RXD0引脚输出,通过RS232串口通讯方式传输给上位机的LABVIEW检测程序中,经过相应的分析和处理,把所需要的信息以数字和波形曲线实时显示出来。主控制器实物如图4所示:

图4 线控转向控制器实物图Fig.4 Controller of SBW
3 系统控制策略及算法
整个自动驾驶系统的控制策略和算法比较复杂,从控制功能的实现上分为组合导航算法、路径跟踪控制及转向执行电机控制策略。系统整体控制框图如图5所示:
根据车辆当前位置坐标y与规划路径坐标ym计算出车辆横向偏差Δy,以Δy和车辆航向角θ为输入变量,利用控制器决策出车辆目标航向角θm;结合车辆当前航向角θ计算航向角偏差Δθ,以Δθ和载体当前轮转角α为输入变量,控制器决策出电机的目标转角ωm;采用双闭环控制方法控制电机转动,使电机目标转角偏差最小化。
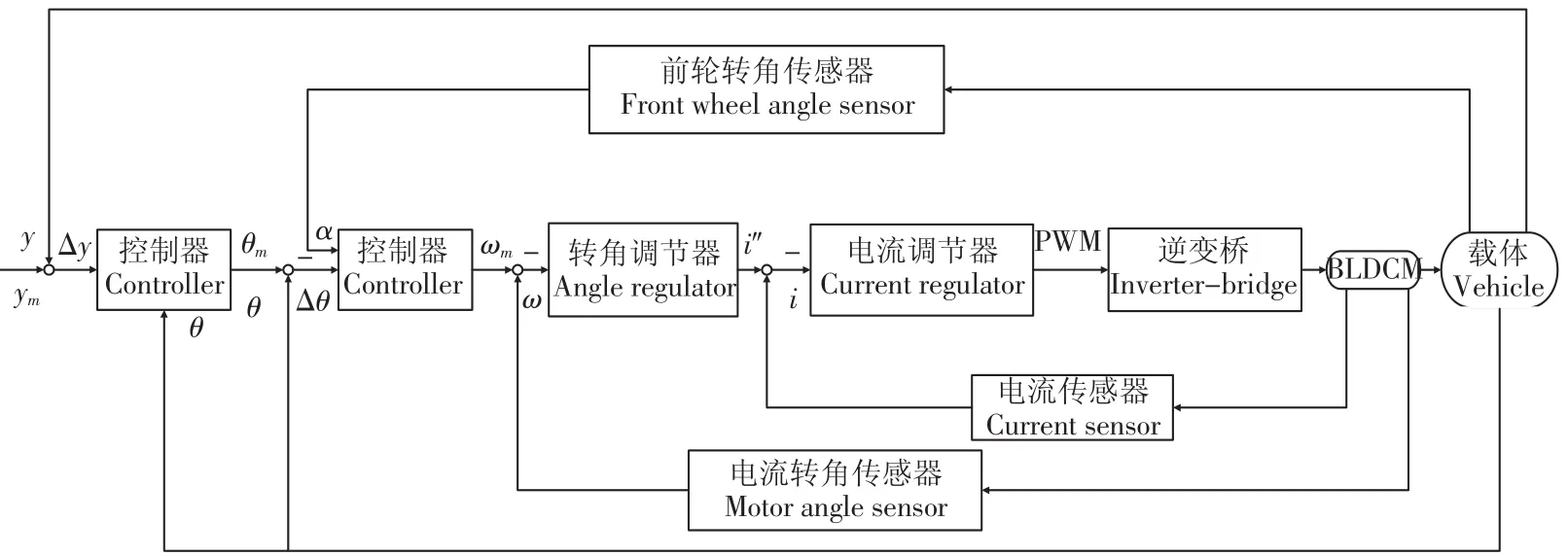
图5 系统控制框图Fig.5 Control block diagram of system
3.1组合导航算法
本文根据物理组成和功能将组合系统划分为三个模块:GPS接收机模块、INS模块和组合导航计算模块。本文采用松耦合方式,将GPS和INS各自输出的位置估值和速度估值进行比较,得到的差值作为卡尔曼滤波器的测量输入值,对惯导系统提供测量更新,以提高惯性导航的精度。位置速度信息的组合原理框图如图6所示:

图6 组合导航系统设计方案Fig.6 Integrated navigation system design
3.1.1车辆姿态解算方法设计
本文利用惯性传感器测量汽车的6自由度状态参数,采用四元数法对车辆的姿态角进行捷联解算,再通过卡尔曼滤波器对姿态角进行最优估计[14],减小误差,其流程如图7所示。
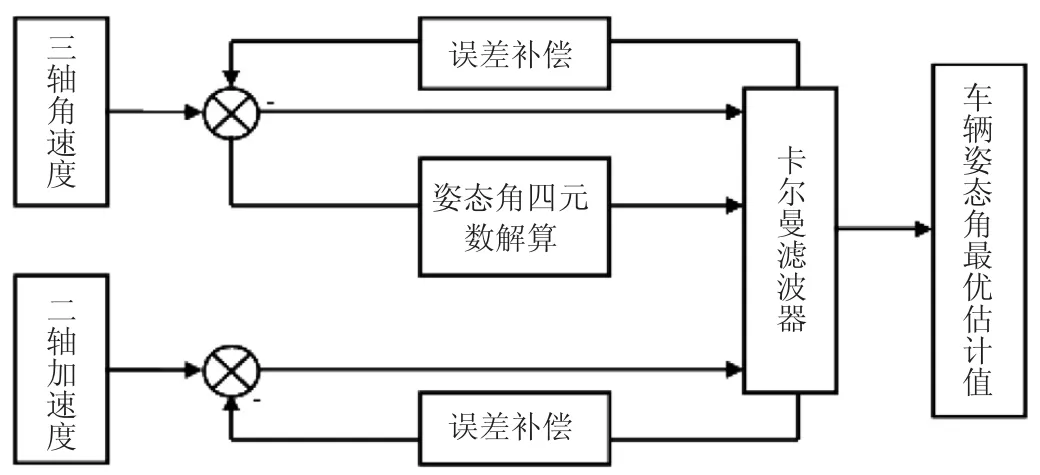
图7 姿态解算流程图Fig.7 Vehicle attitude angle measurement flow chart
四元数是一个由四个元构成的数,首先建立系统四元数的微分方程,通过四阶的Runge-Kutta法求解q0,q1,q2,q3,再将其带入车辆姿态矩阵(1),方程解如下:

其中,q0,q1,q2,q3均为实数标量。
(1)式即为车辆四元数姿态矩阵,将其与车辆的欧拉角姿态矩阵进行对比,可得到姿态角与四元数之间的转换关系。

式中φ为横摆角、γ为侧倾角、θ为俯仰角,其单位为rad。
所以汽车姿态角:横摆角φ、侧倾角γ、俯仰角θ分别为:

3.1.2捷联惯导算法设计
导航坐标系下车辆速度的微分方程为:

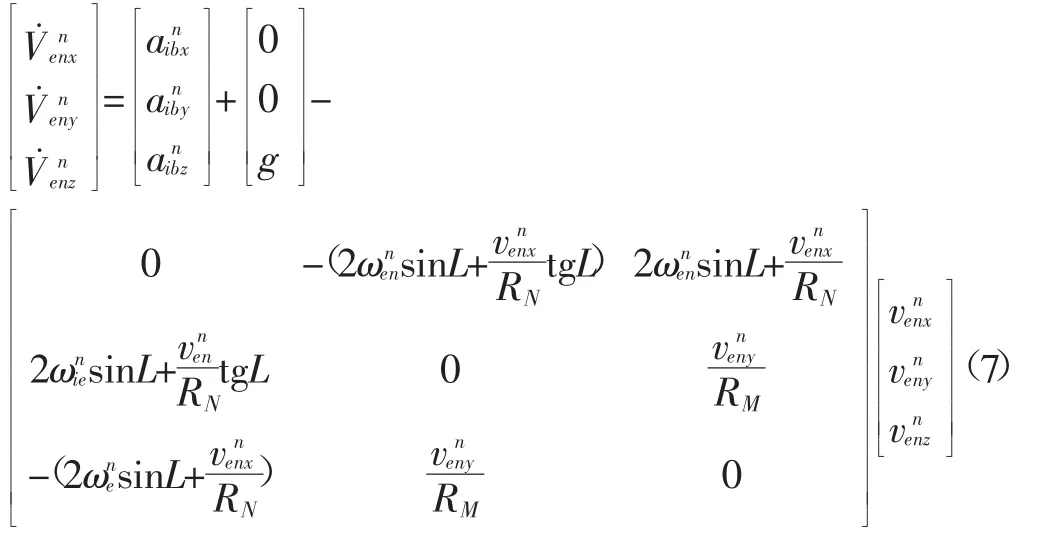
根据式(7)计算出地理坐标系中的经纬度位置
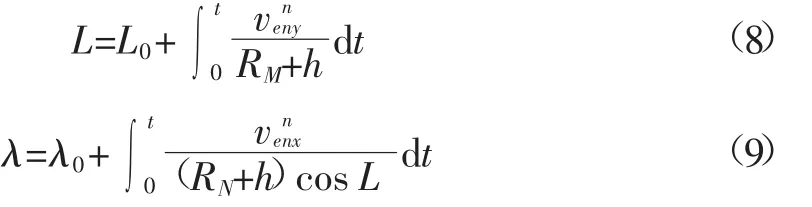
式中RN、RM为地球半径,L为前纬度,h为高度。
3.1.3差分GPS算法设计
根据GPS动态定位法,选择单差定位模型。在多台接收机同时观测的情况下,对于同一颗卫星,可以同时列出多个观测方程,取其中一个观测方程作为基准,其他方程与之相减。基准站的空间坐标为己知,由此解得流动站的空间坐标[16]。现考虑一个基站一个流动站的动态定位情况,假设a点为基准站,b点为流动站,GPS接收机在两个不同的地点a,b的误差为:

当a,b处的接收机选取同一组星座时,ΔSa=ΔSa=ΔS,位置差分的定位误差为:


位置误差可以分成随机误差V和系统误差B,其中地面多径效应、GPS通道误差、接收机噪声是随机误差的主要原因,对流层
在a,b两处分别设置GPS站点,有:

将(13)式带入(12)式,可以得到:

可以认为,Va、Vb是相互独立的,并且E{V1}=E{V2}=0。Ba,Bb有很多相同的元素,令:
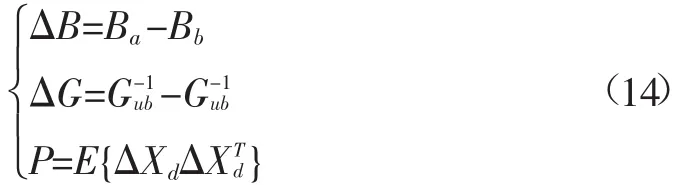
由(14)式可算出P,其中定位误差的RMS值是P的前三个对角线元素之和开方,即:

由(15)式可以看出,由B引起的定位误差只剩下了二阶小量,因此可以认为大部分系统误差被抵消。由V引起的误差增大了,但V引起的误差所占成分较小,综上可以认为差分后定位误差可以大幅度降低。
3.2路径跟踪控制算法设计
使车辆贴合既定轨迹行走的反馈控制是路径跟踪的重要目的[17],本文设计的控制方法是基于车辆的未来位置和目标位置的偏差值,当车辆行驶的目标路径已知时,利用预测控制的理论得到目标前轮转角,从而实现路径跟踪控制功能。
3.2.1预见点Q以及目标点P
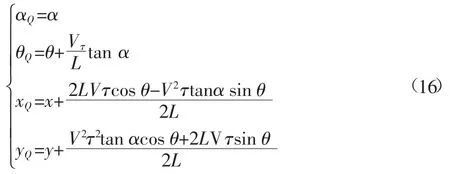
路径跟踪功能的实现要求预见点和给定路径尽量重合。本文中,将点定义成预见点,也就是经过时间τ后到达的位置并且车辆始终保持当前的转向角,设xQ=[xQ,yQ,θQ,αQ]T是预见点的状态向量,可由(16)式求出,其中x,y,θ,α为当前车辆的状态值。
根据求出的Q点的坐标,利用二分法求得目标路径上距离Q点最近的点P的状态量xp=[xp,yp,θp,αp]。
3.2.2P点附近的车辆运动方程
预见点以及目标点的状态向量分别为:

上式中δx=[δx,δy,δθ,δα]T为更新后的状态向量,δu=δα为更新后的控制向量。A(t),b分别由下式表示:

3.2.3前轮转角算法设计
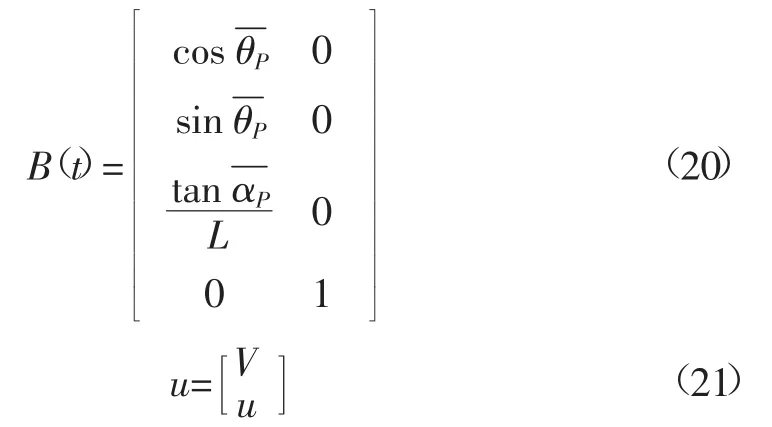
当式(18)中的状态量θP=0或时,系统将不能控,所以将速度变化量δV=V-看成新的控制量引入以避免不能控的情况,扩张后的车辆运动方程式为:=A(t)δx+ B(t)u。式中:
根据无限时间调节器的概念设计导航控制器的时候,目标函数表达式见(22)式:

路径跟踪控制的关键在于x,y,θ的精度跟踪,假设农用车辆为匀速行驶,可以对Q、R做出以下设定,消除行驶速度的影响。
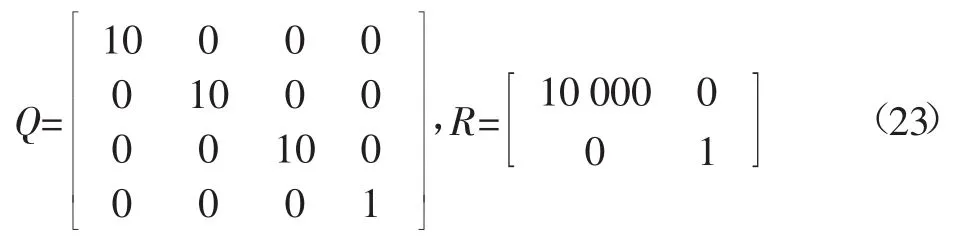
由黎卡提代数方程:

可以得到的反馈增益矩阵为:

由于所求得的Kv会很小,并且本文中的控制变量不包括行驶速度,所以在实际情况下的控制器就如(25)式所示:

将计算出的转角修正量与P点的转向角相加,得到最终转向角如下:

4 系统软件设计
本文根据系统的功能对系统软件进行设计,主要包括组合导航系统软件设计、主控制器软件设计。
4.1组合导航系统软件设计
组合导航定位系统主要为车辆导航控制提供准确的位姿信息,如车辆位置坐标、航向角、行驶速度等,本文在目标试验车辆上分别安装GPS传感器、惯性传感器,将传感器检测到的车辆状态信息通过一定的接口输入到计算机内,利用计算机软件计算车辆的位置坐标以完成精确导航定位。图8所示为组合导航系统软件设计的流程:
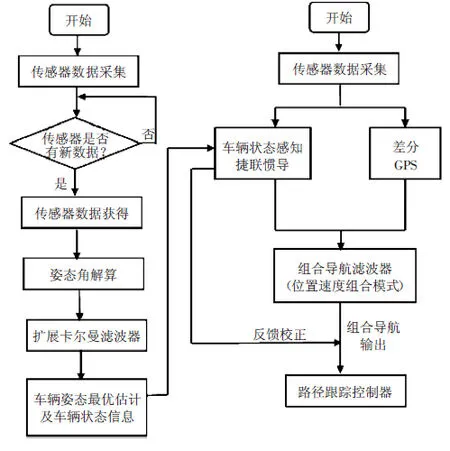
图8 组合导航系统软件设计的流程Fig.8 Overall process of software design
本文以Visual Studio2010为工具,根据组合导航的系统功能自主开发了组合导航系统软件,通过该软件采集车载感知系统数据和GPS数据,并计算出载体姿态解算值[18]。其软件如图9所示:
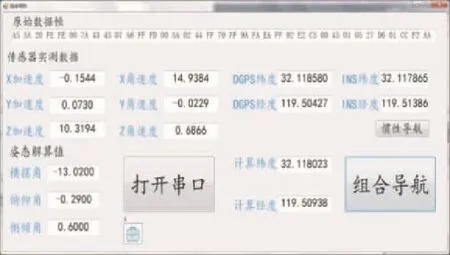
图9 组合导航系统软件Fig.9 Vehicle navigation system interface
4.2主控制器软件设计
本文选用直流无刷电机来实现车辆的转向控制,对于直流无刷电机采用双闭环控制[19],其中转角环为滑模变结构控制,电流环为PID控制。转向执行电机的控制框图如图10所示。

图10 转向执行电机控制框图Fig.10 Control block diagram of BLDCM
由主控制器的功能和上述控制框图可知,主控制器主要实现路径跟踪控制和对转向执行电机的控制,因此需要实时接收电流传感器、转角传感器的数据,同时需要实时接收CAN总线发送的载体姿态信息,并根据接收到的各类数据计算出载体目标前轮转角,根据目标前轮转角、当前前轮转角及传动比最终确定转向执行电机的转角。其软件设计方案如图11:
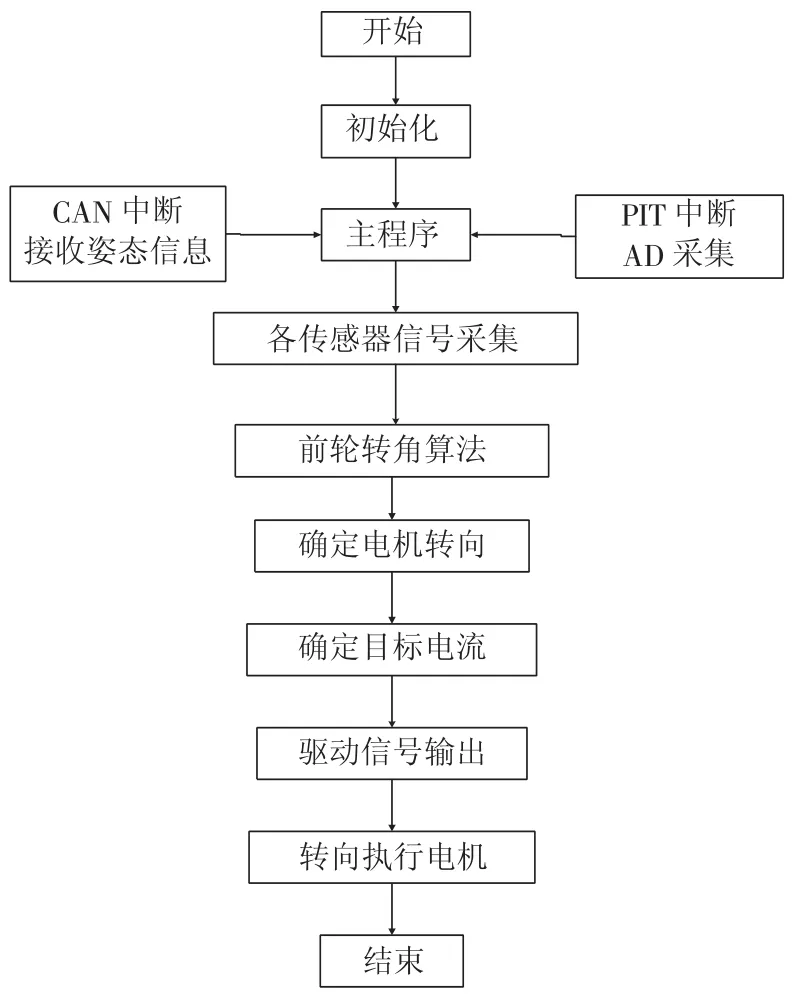
图11 转向系统软件设计方案图Fig.11 Designing scheme of the program of ECU
5 试验验证及仿真
本文根据车辆运动学方程对车辆导航控制方法以及所设计的路径跟踪控制器进行有效性验证,在Matlab环境下对车辆导航控制进行了仿真研究。同时,建立直流无刷电机的Simulink模型,对其控制策略进行仿真研究[20]。5.1路径跟踪控制仿真
利用车辆运动学模型和所设计的导航控制器,在Matlab里面编写了相应的M文件,设计一条曲线参考路径y=2*sin(x/3),车辆速度分别取0.5、1 m/s进行仿真,设置车辆初始位置偏差为0,跟踪效果如图11所示。航向角的偏差变化曲线如图12所示。最大横向误差在两种速度下分别为0.16、0.27 m。
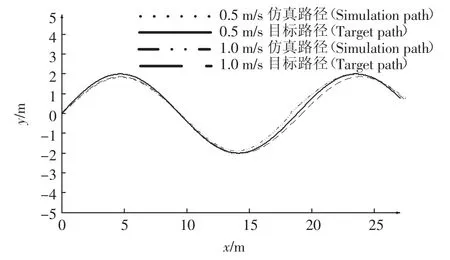
图11 目标路径及行驶轨迹Fig.11 The target path and trajectory

图12 航向偏差Fig.12 Lateral deviation
5.2转向执行电机控制策略仿真
文建立直流无刷电机的Simulink模型,对其控制策略进行仿真研究。分别对直流无刷电机以普通PID控制和滑模变结构控制,将两种控制策略结果进行对比。给直流无刷电机以48°角输入,观察仿真时电机的响应曲线。在0.5 s时给直流无刷电机一定常值干扰下,观察PID控制和滑模变结构控制的响应曲线。仿真结果如图13所示:
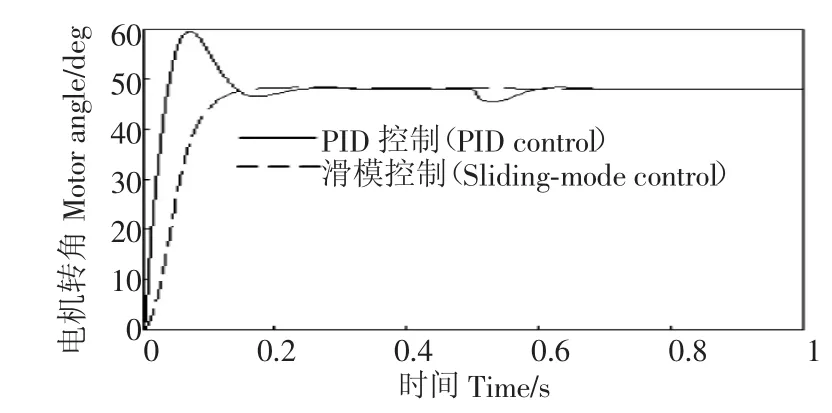
图13 值扰动下电机转角响应曲线图Fig.13 Changing curve of motor angle under constant disturbance
由图13可知滑模变结构控制能够使电机快速到达目标稳定值,而PID控制存在着一定的超调,所以滑模变结构控制相对于PID控制响应速度快、超调量小。当在0.5 s时给电机加入一定的定值干扰时,滑模控制对干扰免疫力强,几乎不受干扰影响,而PID控制对干扰比较敏感。所以可以看出滑模变结构控制较PID控制抗干扰能力强。
5.3GPS/INS导航验证试验
基准站与流动站安装完成后,通过车载电源转换装置为GPS接收机与惯性感知单元进行供电。通过RS232串口通信将惯性感知单元和GPS接收机输出的数据同时输入计算机,利用自主设计的组合导航软件将实验数据进行处理并存储。所有设备安装好后,预热10 min。开始进行实验,在进行初始对准结束后,车辆开始运动,利用编写好的软件采集组合导航系统输出的数据和GPS的输出数据,并对其进行处理。
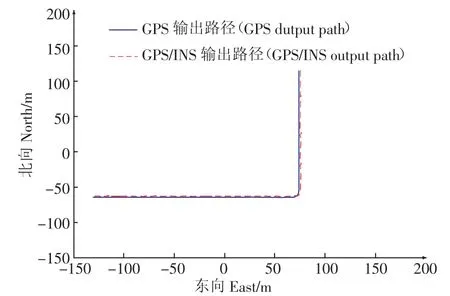
图14 位置信息对比Fig.14 Location information comparison

图15 试验车辆平台的搭建图Fig.15 Software program flow chart
由于存在连续的GPS速度和位置信息的输出,惯性传感器的误差以及INS的导航参数都被5 Hz的GPS输出进行了校正,从而阻止了INS的定位误差随时间长期积累。从图14可以看出,组合导航系统解算得到的载体运动轨迹可以很好的跟踪上载体真实的运动轨迹。组合导航系统最后的导航定位精度在0.1~0.5 m左右。
5.4转向控制试验
由于条件限制,转向实验不能在实车上完成。所以设计了转向实验台,完成相应的硬件在环实验。本文将路径跟踪系统所得到的目标前轮转角以数据文件的格式通过串口输入到转向系统ECU中。通过上位机监控程序进行监测,主要为前轮转角监测模块。实验平台硬件搭建如图16:

图16 线控转向实验图Fig.16 SBW test bench test
试验过程中观察结果,电机响应目标前轮转角输入如图17所示,结果表明试验台架转向跟随效果较好,证明该转向系统性能较好,未来改装到车辆上进行转向控制是可行的。

图17 目标前轮转角与台架电机的前轮转角Fig.17 The front wheel steering angle and front wheel corner bench machine
6 结论
本文自主设计了农业机械自动驾驶系统,包括GPS/ INS(global positioning system/inertial navigation system)组合导航系统、路径跟踪系统、转向执行系统。所设计的组合导航系统能获得较精确的农用车辆导航信息;主控制器实时精确控制转向执行电机,实现车辆的自动驾驶功能。
本文通过对农用车辆的路径跟踪控制系统进行了研究,开发了一套组合导航跟踪定位系统,可实时获取车辆的精确位置,并实现车辆对规定路径的跟踪;搭建了线控转向试验台,完成了主控制器的软硬件设计,并对相关控制算法进行了联合仿真和硬件在环实验验证,最终验证了整个系统响应速度快,达到0.1 s;超调量小、稳定性好;组合导航系统定位精度高,定位精度在0.1~0.5 m左右;整个系统控制策略可行,抗干扰能力强。
[参考文献]
[1]殷春燕.浅谈农业机械自动化[J].西部大开发旬刊,2010,(6):188-188.Yin Chunyan.Introduction of agricultural machinery automation [J].West China Development,2010,(6):188-188.
[2] Torii T.Research in autonomous agriculture vehicles in Japan [J].Computers & Electronics in Agriculture, 2000, 25(99):133-153.
[3] Reid J F,Zhang Q, Noguchi N, et al.Agricultural Automatic Guidance Research In North America[J].Computers & Electronics in Agriculture,2000,25(1):155-167.
[4] Keicher R,Seufert H.Automatic guidance for agricultural vehicles in Europe[J].Computers & Electronics in Agriculture,2000,25(99):169-194.
[5]黎永键,赵祚喜.基于GPS_SINS组合的农业导航定位系统设计与研究[D].农机化研究,2014,(3): 16-22.Li Yongjian, Zhao Zuoxi.The design and research of agricultural navigation and positioning system based on GPS/SINS [D].Agricultural Mechanization Research, 2014,(3): 16-22.
[6]魏少东.基于GPS和惯性导航的果园机械导航系统研究[D].西北农林科技大学,2013.Wei Shaodong.Research on orchard mechanical navigation system based on GPS and inertial navigation[D].Northwest Agriculture and Forestry University, 2013.
[7]龚毅.一种无人驾驶车辆路径跟踪控制方式研究[D].南京理工大学,2014.Gong Yi.An unmanned vehicle path following control method research[D].Nanjing university of science and technology, 2014.
[8]刘军,穆桂脂,罗石,等.线控转向硬件在环系统设计[J].机械设计与制造, 2009,(3):232-234.Liu Jun, Mu Guizhi, Luo Shi.Wire control steering hardware in loop system design[J].Machinery Design and Manufacture, 2009, (3): 232-234.
[9] Hoffman K,Varuso R,Fratta D.The Use of Low-Cost MEMS Accelerometers for the Near-Surface Monitoring of Geotechnical Engineering Systems[J].American Society of Civil Engineers,2014,(187).
[10]陈树人,尹建军.GPS技术及其在农业工程中的应用[J].排灌机械工程学报,2003,21(5):40-42.Chen Shuren, Yi Jianjun.GPS technology and its application in agricultural engineering[J].Journal of Drainage and Irrigation Machinery Engineering, 2003, 21(5): 40-42.
[11]李富荣,秦永元.松散组合导航系统中惯导和GPS的信号同步[C].中国航空学会控制与应用学术年会,1998.Li Furong, Qin Yongyuan.Loosely integrated navigation system of INS and GPS signal synchronization[C].China aviation learn to control and application of academic annual meeting, 1998.
[12]刘军,石存杰,余节发.车载感知与智能终端的硬件设计[J].微型机与应用,2012,(3):31-33.Liu Jun, Shi Cunjie, Yu Jiefa.The design of intelligent terminal hardware and perception on vehicle[J].Microcomputer & Its Applications, 2012,(3): 31-33.
[13] MC9S12XET256开发平台实验指导手册.http://fxfreefly.taobao.com.MC9S12XET256 development platform experiment instruction manual.http://fxfreefly.taobao.com.
[14]罗建军.组合导航原理与应用[M].西安:西北工业大学出版社,2012, 4:115-118.Luo Jianjun.Principle and application of integrated navigation [M].Xi’an: Northwestern Polytechnic University Press, 2012, 4: 115-118.
[15]刘华迪.基于MEMS惯性组件的INS/GPS组合导航定位定姿的研究[D].沈阳理工大学,2013.Liu Huadi.Research on INS/GPS integrated navigation and positioning based on MEMS inertial components[D].ShenYang Ligong University, 2013.
[16]徐周.GPS差分定位技术及实现方法的研究[D].中国人民解放军信息工程大学,2006.Xu Zhou.The research of differential GPS positioning technology and implementation method[D].The PLA InformationEngineering University,2006.
[17] Harada H.Control strategy of active rear wheel steering in consideration of system delay and dead times[J].JSAE Review, 1995, 16(2):171-177.
[18]隗燕琳,陈进明.基于VB与Matlab的混合编程方法[J].计算机与数字工程,2013,41(8):1388-1390.Wei Yanlin, Chen Jinming.The mixed programming method based on VB and Matlab[J].Computer & Digital Engineering, 2013, 41(8): 1388-1390.
[19]罗石.线控转向系统主动安全预测控制策略的研究[D].镇江:江苏大学博士论文,2010.Luo Shi.The control strategy of active safety prediction research of SBW system[D].ZhenJiang: Jiangsu university doctoral thesis, 2010.
[20]李颖,朱伯立,张威.Simulink动态系统建模与仿真基础[M].西安:西安电子科技大学出版社,2004.LiYing, Zhu Boli, ZhangWei.The model of dynamic system and basic simulation[M].Xi′an: xi′an electronic science and technology university press, 2004.
Autopilotsystemofagriculturalvehiclesbasedon GPS/INSandsteer-by-wire
Liu Jun, Yuan Jun, Cai Junyu, Tao Changling, Wang Liming, Cheng Wei
(Jiang Su University School of Automobile and Traffic Engineering, Zhenjiang Jiangsu 212013, China)
Abstract:The application of the path tracking technology on agricultural vehicle makes the robot replace farmers for field operation, and the accuracy, production efficiency and dependability about farming automation are improved effectively.Meanwhile the labor time, labor intensity of drivers and the production cost are saved.The path tracking of agricultural vehicle was studied in an operating condition, and a variety of sensors were installed on the car features of the external environment.Then it generated a four-element in state space by the target path which was given for controling the agricultural vehicles to track the target path automaticly according to the theory of optimal navigation control.The location method of GPS/INS was selected, the navigation system was developed, and the experiment was finished in 2014.According to the needs of automatic walking positioning system, a variety of sensors has been chosen, including the inertial sensor, angle sensor and GPS sensor.Then the serial program was writen to collect the signal from the sensors and calibrate them.In order to meet the requirements of vehicle navigation system, the positioning system with low cost and high precision was developed.The hardware of the system consisted of two GPS modules, two Zigbee wireless transmission modules and an inertial sensor.The data from the sensors are filtered and fused, and finally accurate, reliable vehicle position data was got.The tracking controller based on preview control was designed to obtain the future values and target values of the vehicle.With the target path and its curvature, the feed forward control value was got.There was an error between the current state and the state of vehicle target path that was needed to use LQR for elimination.The performance of the path following controller was simulated by Matlab, then the maximum lateral error was 0.16 m and 0.27 m at the speed of 0.5 m/s and 1 m/s respectively.The results showed that the control method was feasible.The steering control system was designed based on steer-by-wire(SBW)after the study of vehicle navigation control principle.SBW removed out mechanical connection between steering wheel and steering front wheel.It used motors to control front wheel angle and simulated force characteristic.Compared with traditional steering system, SBW had characteristics of ideal steering ratio and active steering control according to vehicle state parameters, and improved safety of driving and handling stability.The strategy of BLDCM was designed in order to make actual front angle follow the desired angle better.PID control and sliding mode variable structure control were applied in strategy of BLDCM and the result of simulation showed that sliding mode variable structure control was better than PID control.This paper designed the electronic control unit of SBW based on chip of MC9S12XET256, mainly including peripheral circuit of MCU, CAN communication circuit, drive circuit of BLDCM, power circuit, signal acquisition and processing circuit, current sampling circuit of motor.Based on the requirement of joint simulation, we designed a bench test for control strategy and hardware, software of ECU in 2015.The results of test bench showed that angle correction was similar with the result of simulation and sliding mode variable structure control was better than PID control in following front angle.Finally, the vehicle steering control test and the vehicle path tracking control test were carried out based on vehicle test platform, which was built personally.The vehicle path tracking system was based on the Windows platform, using Microsoft Visual Studio as the development environment.The integrated navigation system was validated and the test data showed that the integrated navigation system had a high positioning accuracy and the steering system had a reliable tracking performance.The final navigation and positioning accuracy of integrated navigation system was around 0.1 m to 0.5 m and the response speed of the whole system was about 0.1s .The results proved that the system could meet the requirements of agricultural vehicle path tracking control system.
Keywords:agricultural machinery; robots; control systems; GPS/INS; integrated navigation; tracking control; steer-by-wire
作者简介:刘军,教授,主要从事汽车电子研究。镇江江苏大学汽车与交通工程学院,212013。Email:772595769@qq.com
基金项目:国家自然科学基金资助项目(51275212)
收稿日期:2015-07-08
修订日期:2015-11-30
中图分类号:U260.38
文献标志码:A
文章编号:1002-6819(2016)-01-0046-08
doi:10.11975/j.issn.1002-6819.2016.01.006
猜你喜欢
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
模具制造(2019年10期)2020-01-06
小学生学习指导·爆笑校园(2019年6期)2019-09-10
中学生数理化·八年级物理人教版(2018年4期)2018-06-27
解放军健康(2017年5期)2017-08-01
中国惯性技术学报(2017年1期)2017-06-09
百科探秘·航空航天(2016年9期)2016-12-01
红蜻蜓·低年级(2015年11期)2016-02-02
探测与控制学报(2015年4期)2015-12-15
