
新型六自由度混联机床机构设计及位置逆解研究**
2016-04-07 12:05:25王俊彦苗鸿宾王书森
制造技术与机床 2016年12期
倪 璟 王俊彦 苗鸿宾 王书森
(①太原铁路机械学校,山西 太原 030006; ②中北大学机械与动力工程学院,山西 太原 030051; ③山西省深孔加工工程技术研究中心,山西 太原 030051)
新型六自由度混联机床机构设计及位置逆解研究**
倪 璟①王俊彦②③苗鸿宾②③王书森②③
(①太原铁路机械学校,山西 太原 030006; ②中北大学机械与动力工程学院,山西 太原 030051; ③山西省深孔加工工程技术研究中心,山西 太原 030051)
提出了一种以新型三自由度并联机构3-PRP作为定位模块,串联上三自由并联机构3-RPS来共同实现六自由度运动的新型混联机床的机构设计方案。首先,运用螺旋理论中运动和约束的关系分析了该机床实现3T3R运动原理,计算出该机构的自由度,进行了输入选取;然后,利用解析矢量法及几何关系建立机构位置逆解方程;最后,应用MATLAB对逆解方程进行求解并利用ADAMS对求解结果进行仿真验证,验证了逆解模型的正确性及机构的可行性。
混联机床;自由度;旋量理论;位置逆解
20世纪90年代末提出的混联机床可同时兼顾串、并联机床各自的优点,同时又能避免单纯串、并联构型所带来的问题,在现代制造业中更具有实用性,是创新发展各种复杂先进装备所需的新机型来源之一[1]。
目前,国内外制造业中,已设计并成功应用多种混联机床,例如德国DS-Techonlogy公司生产的5自由度Exechon机床及瑞典Neos Robotic公司生产的5自由度Tricept系列机床[2-3],均由1R2T的并联机构和一个2自由度的转动头串联形成,具有工作空间大、速度高、刚度大、重构性强等特点,已用于汽车生产自动线上加工、装配、焊接等工序;德国的DS-Technology公司在 DST Sprint Z3 Head 主轴头的基础上,推出的3大系列5自由度高性能加工中心 Ecospeed、Ecomill、Ecolinear,已成功在航空大型结构件高速加工得到应用[4]。德国Mikromat公司采用串联机构实现大的位移运动,并联机构实现旋转运动的思想研制了5自由度Dynapod混联机床;美国Adept Technology公司生产的5自由度Adept Quattro混联机床,由3T1R的4自由度并联机构的动平台串联一个1转动自由度构成[5]。国内,由清华大学和齐齐哈尔第二机床厂研制的NXZ24系列的重型龙门式五轴联动混联机床[6],是由2自由度平动并联机构的动平台上串联2个自由度摆动头并附加一维移动的工作台构成五轴联动机床;Huang等[7]提出一种5自由度名叫Bicept的混联机床,由2自由度并联机构加上一个2自由度旋转头组成一个滑动模块,使滑动模块在直线导轨上滑动工作用于飞机结构零件的装配。Gao等[8]提出一种由3自由度并联机构,辅以平面内的2自由度运动平台组成的5自由度龙门式混联机构,用于大型零部件的加工。
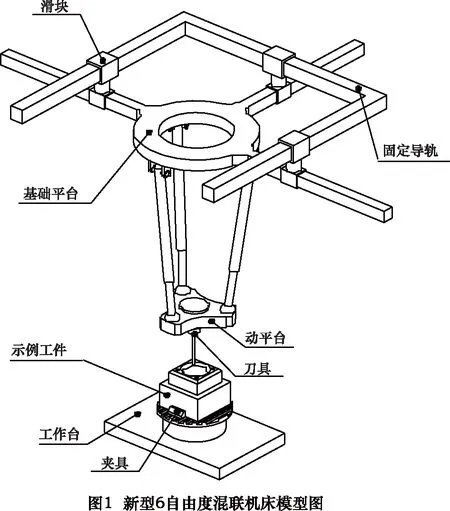
本文将一种新型的混联机构作为混联机床机械本体,设计出一种新型6自由度混联机床,使其满足复杂精密结构件进行高速加工过程中机床应具有的刚度重量比大、响应速度快、加工精度高等的性能要求[9]。解决目前存在于航空航天、铁路运输、国防军工等领域精密结构件的加工难题。基于螺旋理论分析了该机床的运动性质、基于解析矢量法、几何法分析了其位置逆解。
1 新型混联机床构型设想及描述
1.1 混联机床构型设想

1.2 混联机床构型描述
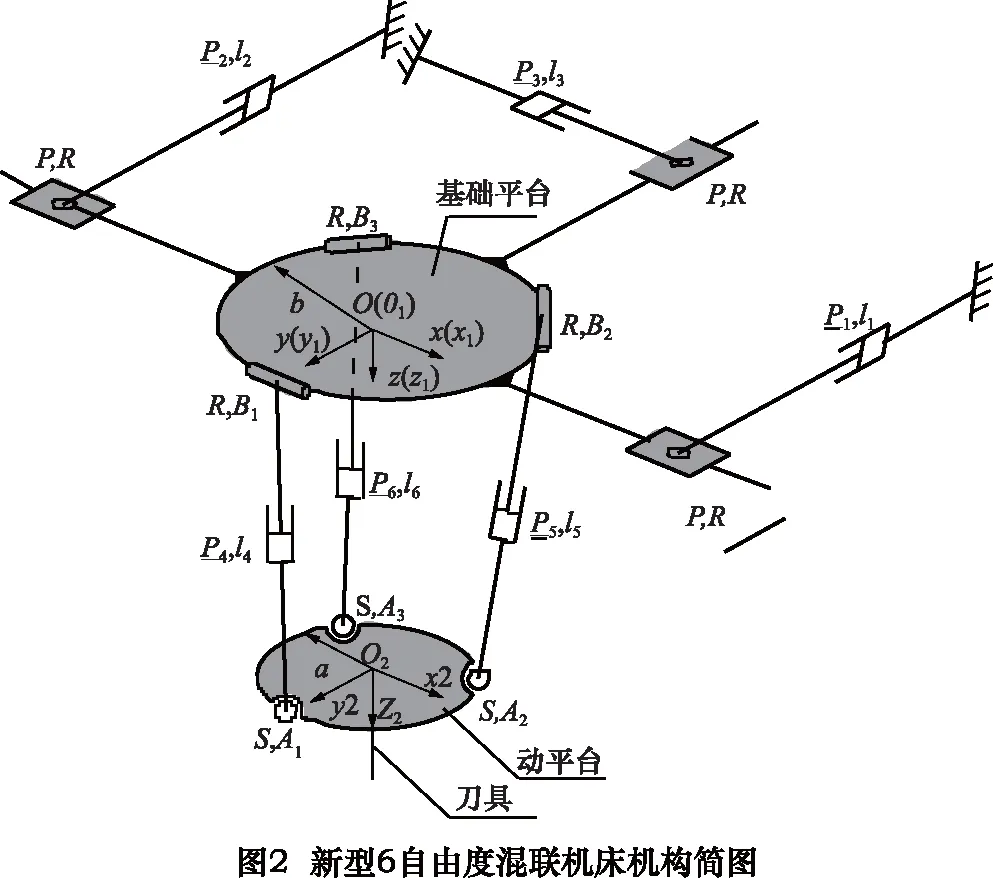
在基础平台B1B2B3中心固连坐标系O1-x1y1z1记为{O1},其y1轴经过B1铰点,x1轴经过两端的滑块,z1轴方向经右手螺旋定则判定为垂直基础平台向下;机床的绝对坐标系(或固定坐标系)O-xyz记为{O},在机床运动的起始位置与基础平台固连坐标系{O1}重合,其位置是固定不动的,O点位于左右平行导轨中间,x轴平行于后侧固定导轨,y轴平行于左右导轨;在动平台A1A2A3中心固连坐标系O2-x2y2z2记为{O2},其y2轴经过A1铰点,x2轴在平面内垂直于y2轴,z2轴方向经右手螺旋定则判定为垂直动平台向下。刀具连接在动平台中心,其轴线与z2轴始终保持平行。机构各长度参数、运动副标号如图标注所示,各驱动支链长度为li(i=1,2,3,4,5,6)。
2 新型混联机床机构自由度分析
2.1 基于螺旋理论的机床机构自由度分析
并联机构自由度分析指对动平台自由度数目以及运动性质的分析。其中常用的方法就是基于螺旋理论中运动螺旋与约束螺旋间的相互关系进行的观察法[11-12]:与分支运动螺旋系相逆的线矢量(约束力)必须满足与该运动螺旋系所有偶量(P副轴线)相垂直且与所有线矢量(R副轴线)相交(平面相交、平行或共轴);与分支运动螺旋系相逆的偶量(约束力偶)必须满足与该运动螺旋系所有线矢量(R副轴线)相垂直。根据此方法可以判断动平台所受的约束螺旋,进而可以推得动平台可以实现的运动形式。而此处运动形式的判定同样可以根据以上方法反推为:与动平台约束螺旋系相逆的线矢量(转动轴线)必须满足与该约束螺旋系所有偶量(约束力偶)相垂直且与所有线矢量(约束力)相交(平面相交、平行或共轴);与动平台约束螺旋系相逆的偶量(移动方向)必须满足与该运动螺旋系所有线矢量(约束力)相垂直。
运用以上方法进行观察判定得出:并联机构3-PRP各支链对基础平台作用有一个约束力、两个约束力偶,其中约束力与R副轴线相交且垂直P副移动轴线,故可判断其方向为沿z方向,该约束力约束基础平台不能实现z轴方向的移动;而两个约束力偶垂直于该支链中R副轴线,故可判断其垂直于z轴即位于xy平面内,此两个约束力偶约束基础平台不能有轴线位于xy平面内的转动自由度。故得出3-PRP可以实现xy平面内的两个移动及轴线平行于z轴的转动,有3个自由度。
3-RPS并联机构中各支链都对动平台存在一个经过支链球铰S中心且平行于R副轴线的约束力,3条支链存在3个这样的约束力平行于基础平台,限制了动平台相对基础平台平行于基础平台的两个移动,即xy平面内的移动;同时3个约束力的线性组合可以唯一地构成一个约束力偶,它约束了动平台绕自身法线的转动。故动平台相对于基础平台有沿z轴方向移动及绕轴线在动平台平面内的两个转动。这样3-PRP并联机构和3-RPS并联机构相互叠加,可得动平台具有3个移动及3个转动,6个自由度。
2.2 基于修正G-K公式的机床机构自由度验证
下面再通过黄真等[12]修正的G-K公式来计算和验证一下该新型并联机构3-PRP的自由度,其公式如下:
(1)
式中:M表示机构的自由度;n表示包括机架的构件数目;g表示运动副的数目;fi表示第i个运动副的自由度数;υ表示机构冗余约束;ζ表示机构存在的局部自由度;d表示机构的阶数。
由前面分析可知并联机构3-PRP基础平台有3个公共约束,故机构阶数d=3;机构没有冗余约束及局部自由度。进而根据公式(1)可求得并联机构3-PRP的自由度数为
(2)
由可知并联机构3-RPS动平台没有公共约束,故机构阶数d=6;机构没有冗余约束及局部自由度。进而根据公式(1)可求得并联机构3-PRP的自由度数为
(3)
所以这也验证了前面的混联机床机构自由度分析是正确的。
3 新型混联机床机构位置逆解模型

(4)
式中:s=sin,c=cos;该矩阵每一列分别表示动平台坐标系x2、y2、z2轴对机床x、y、z轴的方向余弦。
由于刀具轴线与z2轴同轴,于是有刀轴在系{O}的方向矢量nz2为
(5)
在位置逆解中已知的是刀尖的位置OD和刀轴的方向矢量nz2,由几何关系可直接建立OD与系{O2}原点OO2二者之间的关系为
OO2=OOD-lnz2=

(6)
式中:l表示刀具的长度。
易知OO1可表示为

(7)
在{O2}中点Ai(i=1,2,3)的位置及{O1}中点Bi(i=1,2,3)的位置可分别表示为
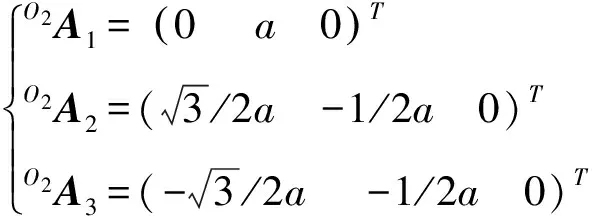
(8)
式中:a、b分别表示动平台、基础平台半径大小。
基础平台姿态即坐标系{O1}相对于机床坐标系{O}的姿态,其旋转矩阵描述为
(9)
通过齐次坐标变换将点O2Ai、O1Bi(i=1,2,3)坐标转换到{O}中,其变换公式为
(10)
故可求得驱动杆长度li(i=4,5,6)为
(11)
Si=li-li0
(12)
式中:li0为杆初始长度。
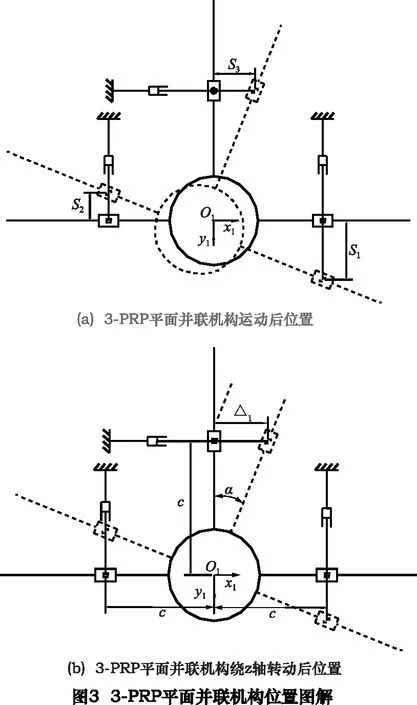
3-PRP平面并联机构运动中位置假设如图3所示,实线表示运动初始位置,虚线表示运动中位置,其移动副Pi(i=1,2,3)的输入位移Si如图3所示。此机构移动运动和转动运动时解耦的故,其Si(i=1,2,3)可表示为
S1=Δ1+O1y;S2=Δ1-O1y;S3=Δ1+O1x
(13)
式中:O1y、O1x为运动中原点O1的坐标分量;Δ1为各驱动杆在由基础平台绕z轴旋转α时的输入位移,如图3b所示,可以表示为
Δ1=ctanα
(14)
式中:c为基础平台原点O1在初始位置至导轨的距离。
整理可得Si(i=1,2,3)可表示为
(15)
4 基于MATLAB的位置逆解计算及基于ADAMS的仿真验证
4.1 基于MATLAB的位置逆解

4.2 基于ADAMS的仿真验证
将机床三维模型导入ADAMS中,添加点运动激励并定义驱动方程使其实现设置的运动,进行运动仿真,仿真结束姿态如图5所示,在后处理模块得到各驱动副输入位移Si(i=1,2,3,4,5)仿真曲线如图6。

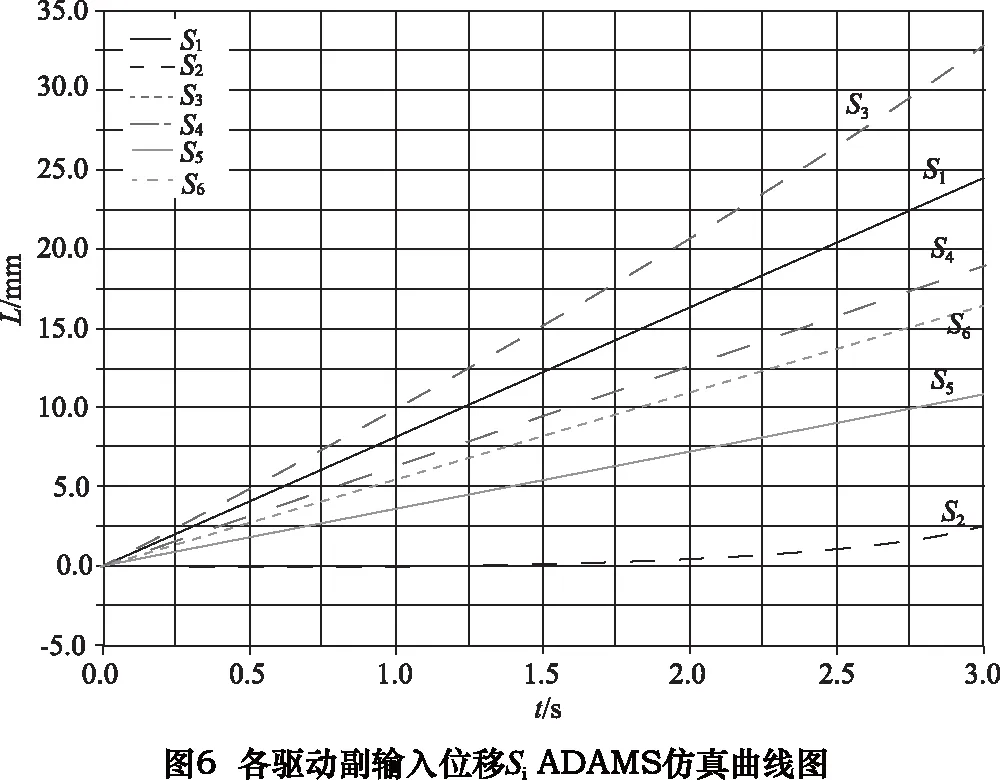
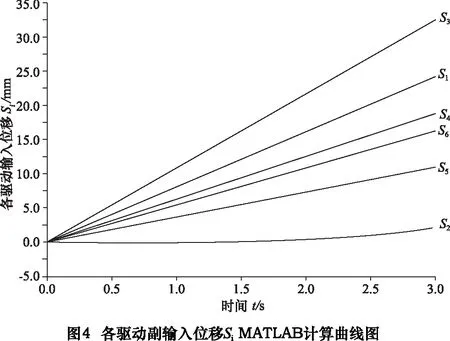
通过对比图4、图6看出MATLAB计算曲线与ADAMS仿真曲线相吻合,从而说明位置逆解模型的正确性。将MATLAB计算的杆长变化曲线,拟合生成驱动副的驱动函数并给驱动副添加,同样可以实现假设的运动形式,从而验证机构的正确性及可实现性。
5 结语
(1) 为完成复杂精密结构件的加工任务,提出一种新型6自由度混联机床,该机床机构为3-PRP+3-RPS混联机构。通过螺旋理论中运动螺旋和约束螺旋的关系及修正的G-K公式分析并验证了此机构能实现3T3R的运动形式。该方法从运动本质上揭示动平台的运动原理,省去了复杂的计算。
(2) 基于解析矢量法及几何法建立了机床机构逆解模型。对于假设的运动形式基于MATLAB进行逆解计算,并通过ADAMS进行仿真分析,验证了逆解模型求解的正确性。对于计算数据拟合成各输入驱动函数能实现其假定运动,证明机构的可行性。
(3) 3-PRP是一种两平移一转动解耦平面机构,可以实现转动和平移运动的解耦运动,做为此机床的定位平台,使此6自由度混联机床具有解耦特性,易于控制。此混联机床兼有并联机床承载能力强、刚度好、精度高的优势,又具有工作空间大的优点,可以用于多轴联动加工,也可作为工业机器人进行喷漆、点焊、钻铆等工作。
[1]沈惠平,赵海彬,邓嘉鸣,等.基于自由度分配和方位特征集的混联机器人机型设计方法及应用[J].机械工程学报,2011,47(23):56-64.
[2]沈惠平,张曙,杨廷力,等.并联运动机械结构综合及其优化设计研究的最新进展[J].中国机械工程,2009,20(1):118-125.
[3]Neumann K E.Robot: US, 4732525[P].1988-03-22.
[4]张曙.航空结构件加工的新一代数控机床—解读 Ecospeed 领悟机床设计之道[J].金属加工:冷加工,2012(3):2-5.
[5]Adept Technology Company Website.Quattro parallel robots [EB/OL].[2011-03].www.adept.com.
[6]刘辛军,汪劲松,高峰,等.并联机器人机构新构型设计的探讨[J].中国机械工程,2001,12(12):1339-1342.
[7]Huang T,Wang P F,Zhao X M,et al.Design of a 4-DOF hybrid PKM module for large structural component assembly[J].Manufacturing Technology,2010,59(1):159-162.
[8]Gao Z,Zhang D.Performance analysis, mapping, and multiobjective optimization of a hybrid robotic machine tool[J].IEEE Transactions on Industrial Electronics,2015,62(1):423-433.
[9]Sangveraphunsiri V,Chooprasird K.Dynamics and control of a 5-DOF manipulator based on an H-4 parallel mechanism[J].International Journal of Advanced Manufacturing Technology,2011,52(1-4):343-364
[10]陈纯,黄玉美,韩旭,等.五面加工混联机床概念设计[J].农业机械学报,2009,40(9):187-192.
[11]黄真,赵永生,赵铁石.高等空间机构学[M].2版.北京:高等教育出版社,2014:114-124.
[12]Lu Y,Hu B.Unification and simplification of velocity/acceleration of limite-dof parallel manipulators with linear active legs[J].Mechanism and Machine Theory,2008,43(9):1112-1128.
如果您想发表对本文的看法,请将文章编号填入读者意见调查表中的相应位置。
Design and inverse kinematics analysis of a novel 6-DOF hybrid machine tool
NI Jing①,WANG Junyan②③,MIAO Hongbin②③,WANG Shusen②③
(① TaiYuan RailWay Machinery School,Taiyuan 030006,CHN;②School of Mechanical and Power Engineering,North University of China,Taiyuan 030051,CHN;③Shanxi Province Deep Hole Machining Center,Taiyuan 030051,CHN)
In this scheme, a novel 3-PRP parallel mechanism is proposed as the position module, which can realize three motion, with assistance of the 3-RPS parallel mechanism, 6-DOF machining can be realized.First, the three-dimensional translations and three-dimensional rotations motion of this machine tool are analyzed based on screw theory of motion and constraints.The DOF of the mechanism is calculated, and the driving joints are chosen; Then, the inverse displacement analysis model is provide by using analytical methods and the geometric relation of the mechanism; At last, the position inverse solution is obtained by using MATLAB and the results simulation verification by using ADAMS, which verify that the correctness of the inverse displacement analysis model and the realizability of the mechanism.
hybrid machine tool;degree of freedom;screw theory;inverse position solution
*国家自然科学基金资助项目(51275486);山西省留学回国人员项目基金(2015-077)
TH165
A
10.19287/j.cnki.1005-2402.2016.11.007
倪璟,女,1990年生,硕士研究生,讲师,主要研究方向为现代机构学与机器人学、现代深孔加工技术。
颖) (
2016-05-03)
161215
猜你喜欢
湖南电力(2022年3期)2022-07-07 08:56:36
装备制造技术(2020年11期)2021-01-26 00:39:14
制造技术与机床(2019年7期)2019-07-22 03:42:24
电子制作(2018年17期)2018-09-28 01:57:02
水利科技与经济(2017年10期)2017-04-25 00:21:00
工会信息(2016年4期)2016-04-16 02:39:07
少儿美术·书法版(2016年12期)2016-02-06 01:00:54
法律史评论(2015年0期)2015-07-31 18:56:51
衡阳师范学院学报(2015年2期)2015-02-26 03:25:05
机械制造与自动化(2014年1期)2014-03-01 04:21:44
