兼容型高灵敏捕获算法的硬件实现方案
2016-04-07 08:41刘益芬
导航定位学报 2016年1期
刘益芬,金 天
(北京航空航天大学 电子信息工程学院,北京 100191)
兼容型高灵敏捕获算法的硬件实现方案
刘益芬,金天
(北京航空航天大学 电子信息工程学院,北京100191)
摘要:针对多模接收机在弱信号环境下的可用性问题,本文提出了一种可兼容多个体制信号的硬件高灵敏度捕获算法。本文采用基于傅里叶变换的部分匹配滤波器的捕获算法,同时通过相干-非相干积分的方式延长积分时间。本文还实现了兼容型捕获算法的要求,可以高灵敏捕获多个类型的卫星导航信号。实际应用中,只需将捕获的信号类型、中心频率及捕获方式(普通/高灵敏)通过接口输入,便可将算法的关键参数预置,实现多种信号的捕获。最后,本文还将该算法在FPGA硬件平台上实现,并测试了实际信号的捕获灵敏度。测试结果表明,其捕获灵敏度可达到26 dBHz。
关键词:捕获;高灵敏;兼容;GNSS;BDS
0引言
北斗卫星导航系统(BeiDou navigation satellite system,BDS)是我国正在实施的自主发展、独立运行的全球卫星导航系统(global navigation satellite system,GNSS),2012年已正式开始提供亚太地区的服务[1],并将在2020年形成全球覆盖能力。目前,BDS在各个领域内都得到了广泛的应用,但是在一些特殊的环境中,例如室内、密林、城市等,信号功率收到了严重的遮挡和衰减,接收机的可用性面临挑战。
高灵敏捕获算法是高灵敏接收机的关键技术之一。但由于体制不同,不同系统信号的捕获方法和参数差别很大,采用单一方法进行捕获非常困难。为了拓展接收机在弱信号环境下的应用,本文提出了一种兼容型高灵敏捕获算法。该算法通过相干-非相干积分延长积分时间以提高捕获信号的信噪比,并且可通过接口配置不同系统、不同频点、不同体制的导航卫星的信号的捕获算法。相对于传统的只能捕获一种信号的算法而言增加了天空中可见星的数量,特别适用于多模接收机在弱信号环境下的使用。
1捕获算法原理
1.1PMF-FFT捕获算法
目前,全球导航卫星系统大多采用码分多址(code division multiple access,CDMA)的信号复用方式[2],接收机对导航信号的捕获主要包括载波频率捕获和伪码相位捕获[3]两方面内容。本文主要采用基于快速傅里叶变换的部分匹配滤波器(partial matched filter based on fast Fourier transform,PMF-FFT)[4]捕获算法,该算法捕获原理如图1所示。
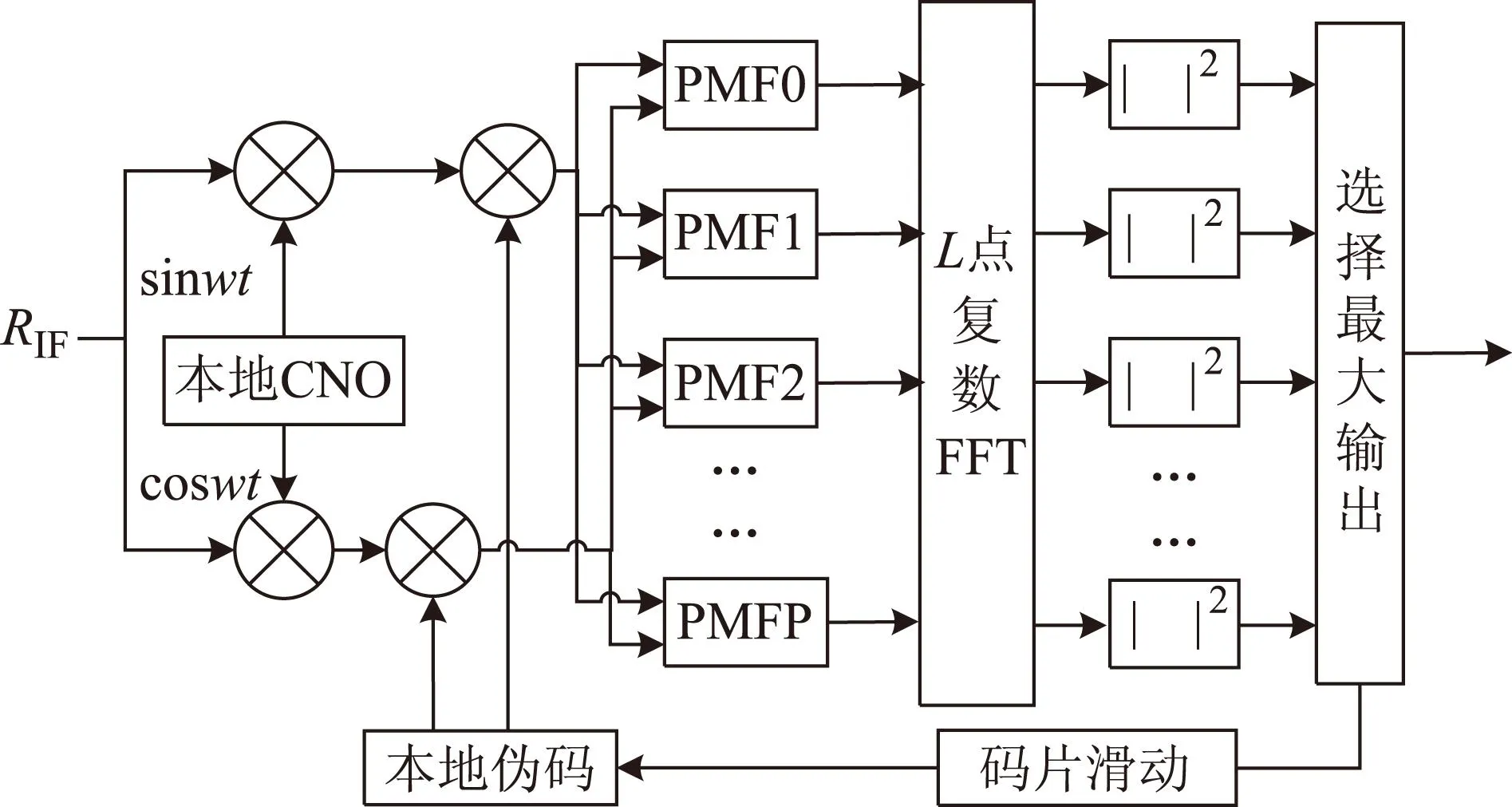
图1 PMF-FFT捕获原理图
如图1所示,射频信号经下变频后即得到中频数字信号RIF, 分别与同相、正交两路载波混频后即得到复数形式的中频信号,再与本地产生的伪码一起依次进入P个X级部分匹配滤波器组。P组匹配滤波器的输出即为P个复数,将这P个复数作为L点快速傅里叶变换快速傅里叶变换(fast Fourier transform,FFT)的输入。进行FFT补偿运算,比较L个FFT输出的最大值,与预设的门限比较判决是否同步成功。
设下变频后得到的中频信号[5]为
RIF(n)=Ac(n)d(n)cos[(ω0+ωd)n+φ]+N
(1)
式(1)中,A为信号幅度,c(t)为扩频序列,d(t)为导航电文数据,ω0为多普勒频率,ωd为载波频率,N为高斯白噪声。
本地参考信号为
I(n)=c(n)cos(ωdn)
(2)
Q(n)=c(n)sin(ωdn)
(3)
在不存在噪声且本地伪码与接收信号伪码同步的条件下,文献[6]给出了系统归一化的幅频响应为
(4)
式(4)中,ωd=πfdTc,k=0,1,…,L-1,L为FFT运算点数,M为部分匹配滤波器长度,Tc为码元宽度。
(5)
将参数稍作调整即可适用于多种类型信号的捕获,尤其满足高动态接收机捕获的性能要求。从运算量的角度看,该算法的FFT运算量仅为L点,节约了大量硬件资源和运算时间。
1.2高灵敏捕获算法
显然,采用相干积分与非相干积分[7]的方式延长积分时间可有效提高接收信号的信噪比以实现弱信号环境下的捕获。但受到导航电文数据跳变的影响,相干积分时间长度是有限的。以全球定位系统全球定位系统(global positioning system,GPS) L1 C/A信号为例,由于导航电文速率为50 bps,相干积分的时间一般被限制在20 ms以内。对于BDS B1I信号,也可以得到相同的结论。根据文献[7],当相干积分时间为Kms时,其增益可以表示为
Gc=10log(K)
(6)
非相干积分是另一种延长积分时间的方式,其中心思想为去除相位信息,仅保留幅度信息,将判决量取平方后再相加。这种积分方式可以使得积分结果不受数据跳变的影响,但是相对于相干积分而言积分增益较低。文献[7]给出非相干积分的增益为
Gi=10log(m)-L(m)
(7)
式(7)中,m表示非相干积分次数,L(m)表示由非相干引起的损耗,当m很小的时候,L(m)发挥的作用不明显,非相干积分可以有效的提高增益,但是当m是一个较大的数值的时候,非相干的损耗接近于L(m)=5log(m), 因此G=5log(m)[7],因此,采用长时间的非相干积分不能有效得提高信号的增益。
1.3参数设置
由式(4)可知,PMF-FFT捕获算法的捕获频率分辨率为
(8)
因此,捕获的频率范围为
(9)
文献[8]描述了GPS L1 C/A信号和BDS B1I信号的相似性,这也是兼容型捕获算法的基础。对于BDS B1I信号而言,低动态普通接收机的频率搜索范围一般为±5 kHz[9],码相位搜索间隔一般要求小于0.5个码片,频率搜索间隔小于500 Hz。而高灵敏捕获后一般需要采用高灵敏跟踪算法对信号进行跟踪,因此高灵敏捕获的频率分辨率一般要求小于50 Hz[10],同时需要满足
(10)
实际使用中取P=10,则有fmax=5 000Hz。
BDS B1I信号上调制了码速率2.046 Mbps,码长为2 046的信号测距码。导航电文分为D1导航电文和D2导航电文,D2导航电文速率为500 bps,主要用于快速定位。D1导航电文速率为50 bps,并调制有1 bps的二次编码,即纽曼-霍夫曼(Neumann-Hoffman,NH)码。该NH码周期为1个导航信息位的宽度,NH码1 bit宽度则与扩频码周期相同。
捕获中积分时间的参数是可配置的。普通捕获仅用2 ms信号。而高灵敏捕获使用20 ms的相干积分,再辅以5次非相干积分。在具体参数配置上,普通捕获和高灵敏捕获均取P=10,L=512,则有fmax=5 kHz,频率分辨率Δf=19.531 25 Hz。
GPS L1 C/A信号上调制了码速率1.023 MHz,码长为1 023的C/A码,导航电文速率为50 bps。仍采用20 ms的相干积分时间及5次非相干积分的高灵敏捕获算法。其余参数皆与BDS B1I信号相同。
2硬件设计与实现
2.1基本框架设计
为了验证算法的实际性能,本文将核心算法在集成了现场可编程门阵列(field programmable gate array,FPGA)、数字信号处理器(digital signal processor,DSP)及通信接口的开发板上实现,具体型号为Xilinx K7 FPGA及C6678 DSP,硬件结构如图2所示。
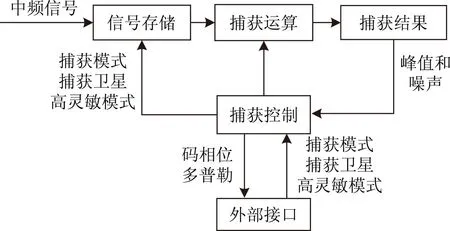
图2 FPGA总体框架设计
接收到外部接口传递的参数后,捕获控制模块首先根据卫星编号及信号模式控制信号存储模块对信号进行存储,同时进行内部参数的设置。再由内部参数控制产生相应的本地伪码序列并进行存储。初始化设置结束后即进入捕获阶段,此时由捕获控制模块对捕获流程进行控制,包括码片滑动、相干积分时间、非相干积分次数等。捕获完成后,同样由捕获控制模块将捕获结果及捕获成功的握手信号发送回外部接口。这样就完成了一次完整的捕获运算。
2.2接口配置
捕获模块的核心功能即为接收到外部的捕获指令,根据指令对相应的信号进行捕获,最后将捕获结果输出。因此接口配置见表1。
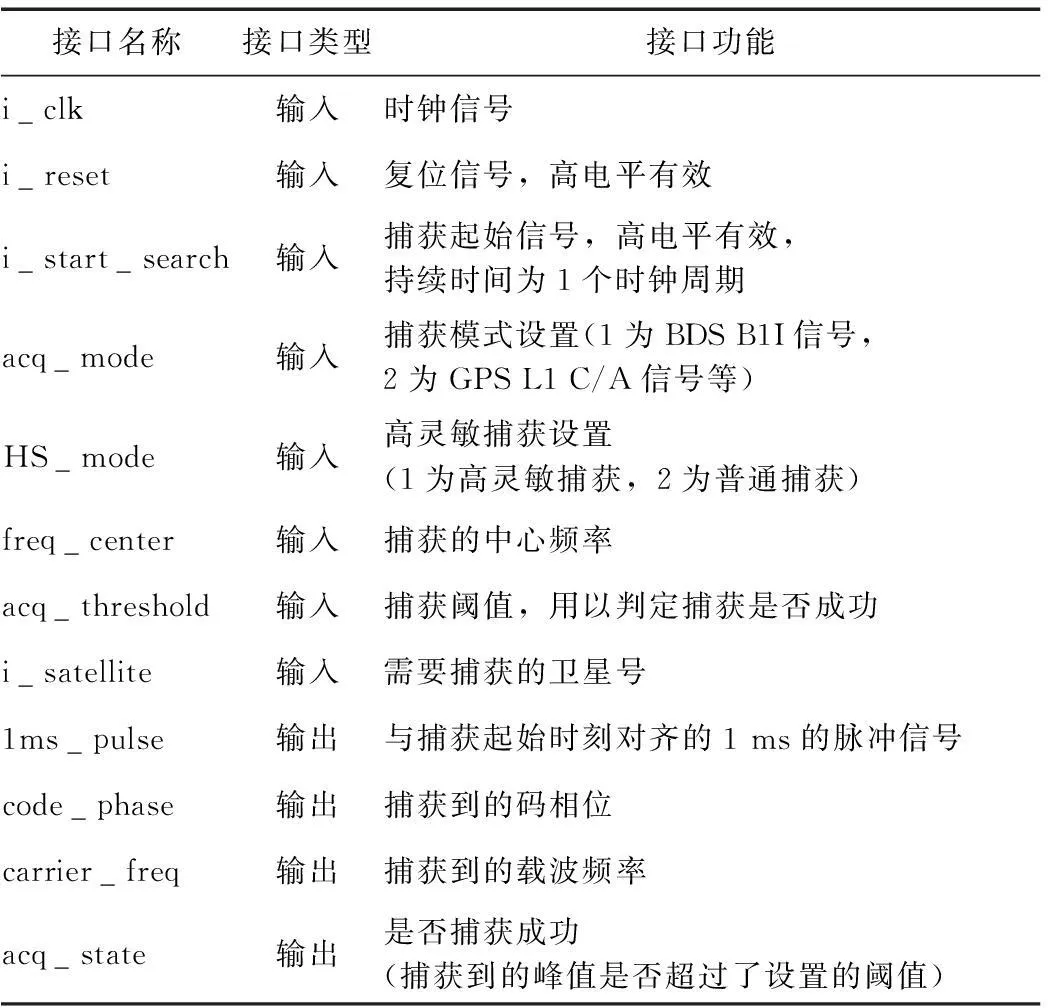
表1 捕获模块顶层接口配置
2.3模块划分
捕获功能的实现需要多个模块有机构成并协同工作,本文在明确捕获系统的输入输出接口后,将该系统划分为几个子模块并独立实现,以利于后期系统的升级和维护。子模块的划分及功能描述见表2。
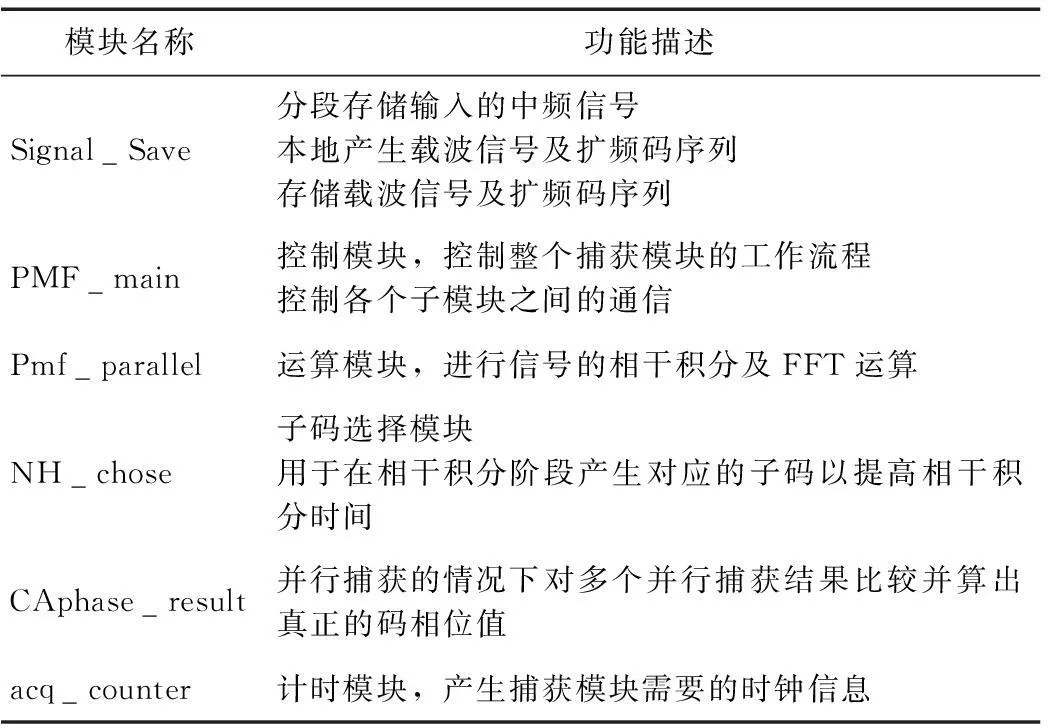
表2 捕获子模块划分
表2中前三个模块是捕获的核心模块,后三个模块主要起到对前三个捕获进行辅助的作用,因此接下来本文将对前三个模块的功能进行详细的描述。
2.3.1Signal_Save
Signal_Save模块即为信号存储模块,在捕获起始阶段由PMF_main模块控制完成捕获系统的初始化工作,Signal_Save模块的主要功能如表2所述。
2.3.2PMF_main
PMF_main模块主要完成了状态机的模块控制工作,包括衔接各子模块的功能、控制数据的运算、控制伪码相位的相对滑动、判决捕获结果的输出等。状态机包含INIT、COLLERATE、FFT、INCOHERENT、SLIDE、RESULT 6个状态,控制流程如图3所示。
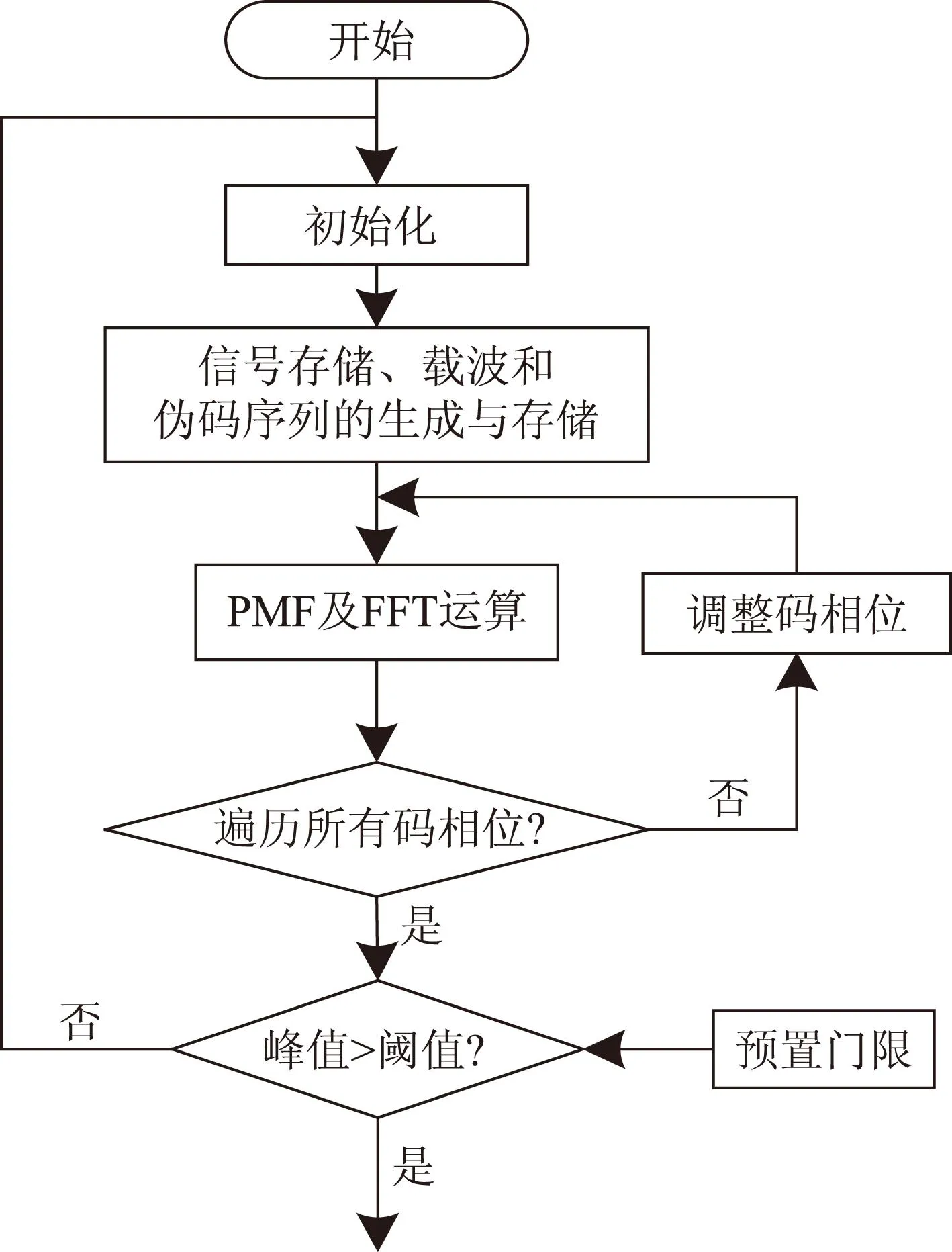
图3 状态机控制流程图
当FPGA接收到DSP传来的捕获开始信号后,工作流程见表3。
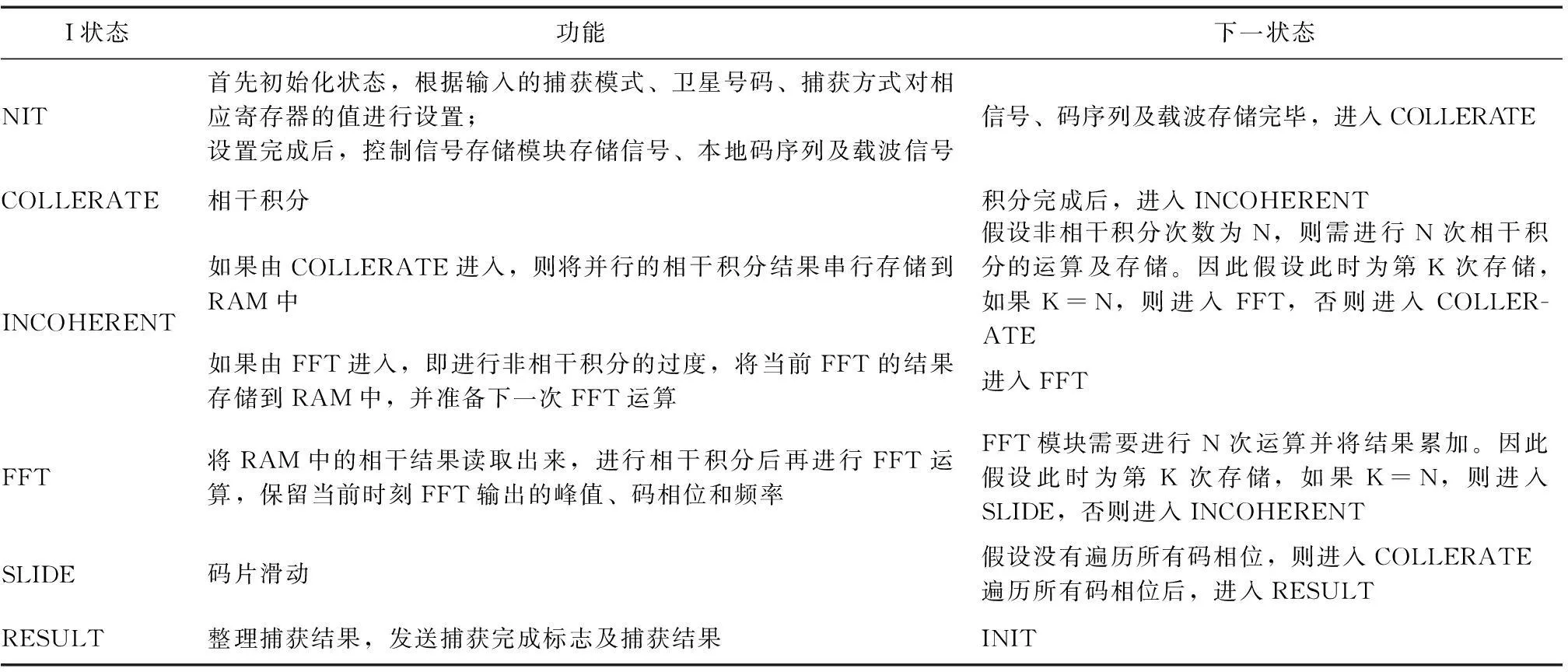
表3 状态机工作流程
2.3.3Pmf_parallel模块
该模块为捕获算法的实际运算模块,主要由相关器及FFT的IP核两部分组成。为了降低捕获时间,实现信号的快速捕获,本文采用了200个的并行相关器完成相干积分功能。相干积分完成后,将相干积分结果转存至存储器中。在高灵敏捕获模式中,还需要将存取器中相干积分的结果进行多周期的相干处理后再送入FFT模块,再进行非相干积分运算。遍历所有码相位后,捕获峰值与门限值进行比较以判定信号是否捕获成功。
2.4相干-非相干积分
根据1.2节所述高灵敏算法的基本原理,同时考虑到长时间相干积分算法可以有效地提高捕获信号的信噪比,而过多次数的非相干积分会引起损耗,本文采用最大限度地增加非相干积分的时间,再辅助以少量次数的非相干积分的捕获算法。
为了突破导航电文比特宽度对相干积分时间的限制,兼顾硬件设计的复杂度,本文采用了一种多周期的相干处理方法[10]。为了遍历所有的码相位,捕获模块至少需要存一个码周期的数据,而多周期的相干处理方法首先需要存储多个码周期的数据,在完成单个码周期相干积分后,根据已知信息量或预测值将输出值进行加权叠加运算,完成多个码周期的相干积分。多周期相干积分的结果经FFT运算后取模比较,将最大的输出值输出作为非相干积分的输入。硬件实现方案如图4所示。
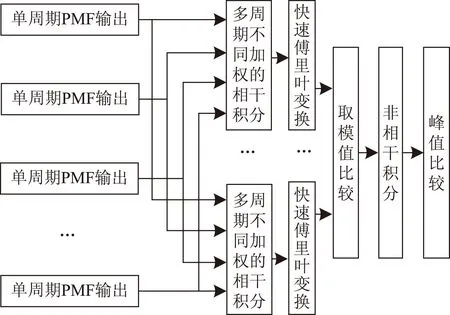
图4 相干及非相干算法框图
2.5兼容型功能的实现
相比较于传统的捕获算法而言,PMF-FFT捕获算法的结构不受伪码长度及伪码速率的影响。只需要将本地伪码与接收信号的伪码对齐后送入级联的匹配滤波器即可完成捕获的运算,因而特别适用于兼容型捕获算法的设计。本课题中兼容型捕获算法的关键在于将运算模块和控制模块彻底分离,如图5所示,在捕获的初始化设置中对相关寄存器的值进行设置。实际捕获流程中依靠这些寄存器的值进行状态转换、握手应答功能。
2.6硬件设计方案总结
结合第1节所述捕获基本原理及高灵敏算法兼容型算法的实现方案,最终完成FPGA捕获模块设计框图如图6所示。
接收到外部接口参数后,捕获模块首先根据当前的捕获模式、卫星编号和中心频率对捕获控制模块的内部参数进行设置。随后根据内部参数产生相应的本地码序列和同相、正交两路载波信号,并完成信号、伪码、载波的分段存储。初始化设置完成后,由捕获控制模块控制捕获的流程,包括PMF-FFT运算、码片滑动及相干-非相干积分运算。最后将捕获结果输出。
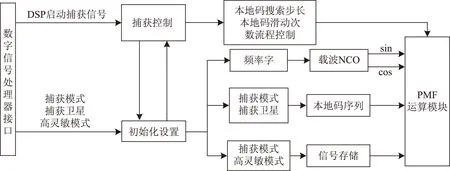
图5 寄存器控制方式
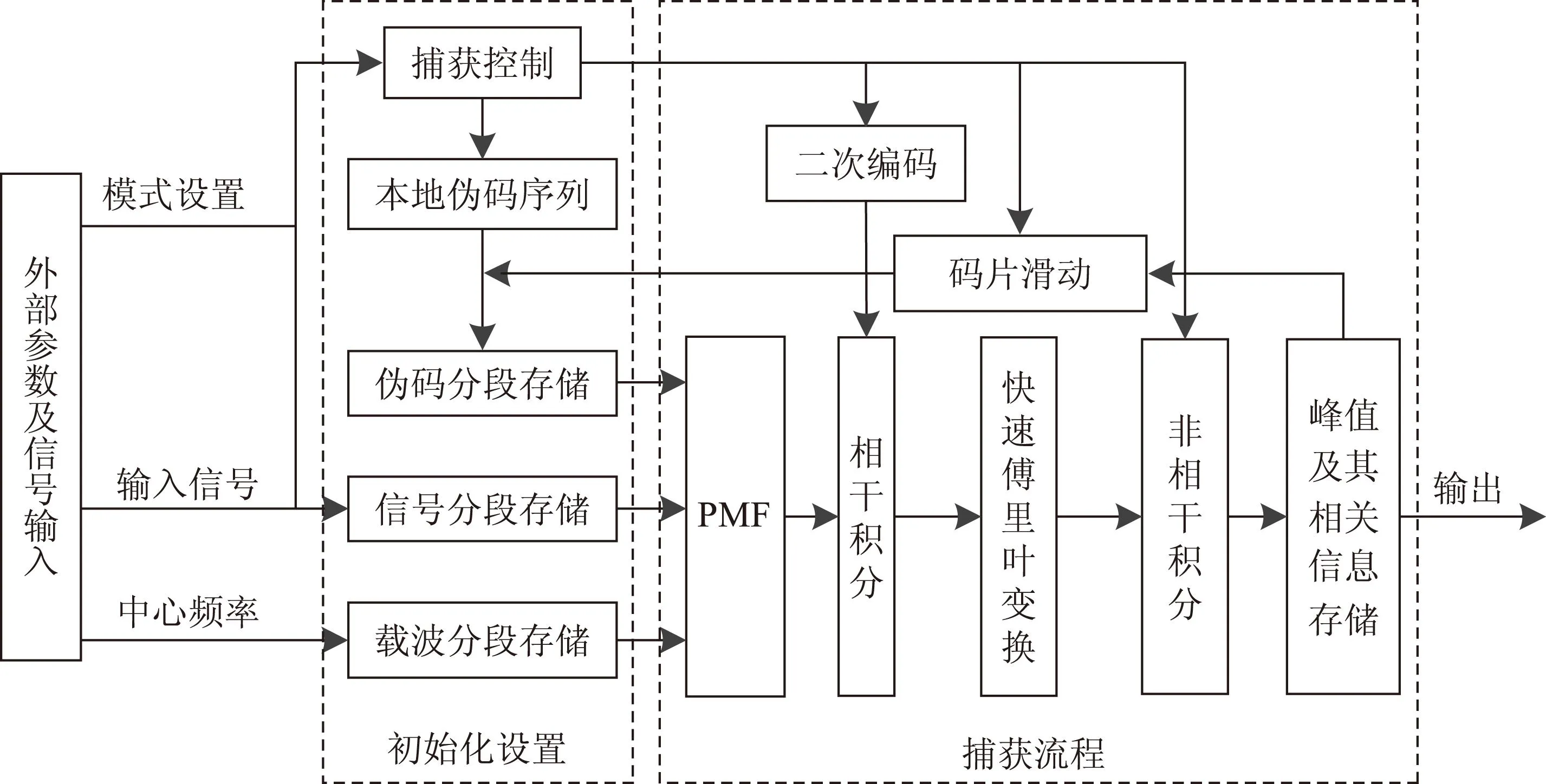
图6 FPGA捕获模块实现框图
3性能分析
本文测试真实的卫星发射的信号,将其进行衰减后利用跟踪环测出当前的载噪比以估测信号此时的功率大小。跟踪环也采用了高灵敏跟踪技术以保证跟踪灵敏度高于捕获灵敏度。这种测试方法不仅可以得到真实环境下该算法的捕获性能,也可以验证高灵敏算法在实际使用时的可用性。
3.1BDS B1I信号测试结果
为了保证该算法对于北斗导航系统的兼容型,本文设置FPGA及其模数转换(AD)芯片输入时钟为62 MHz,经下变频后的中频数据的中心频率为40.42 MHz。设置码片滑动的分辨率,即捕获伪码分别率为0.165个码片,普通及高灵敏捕获性能图7所示。
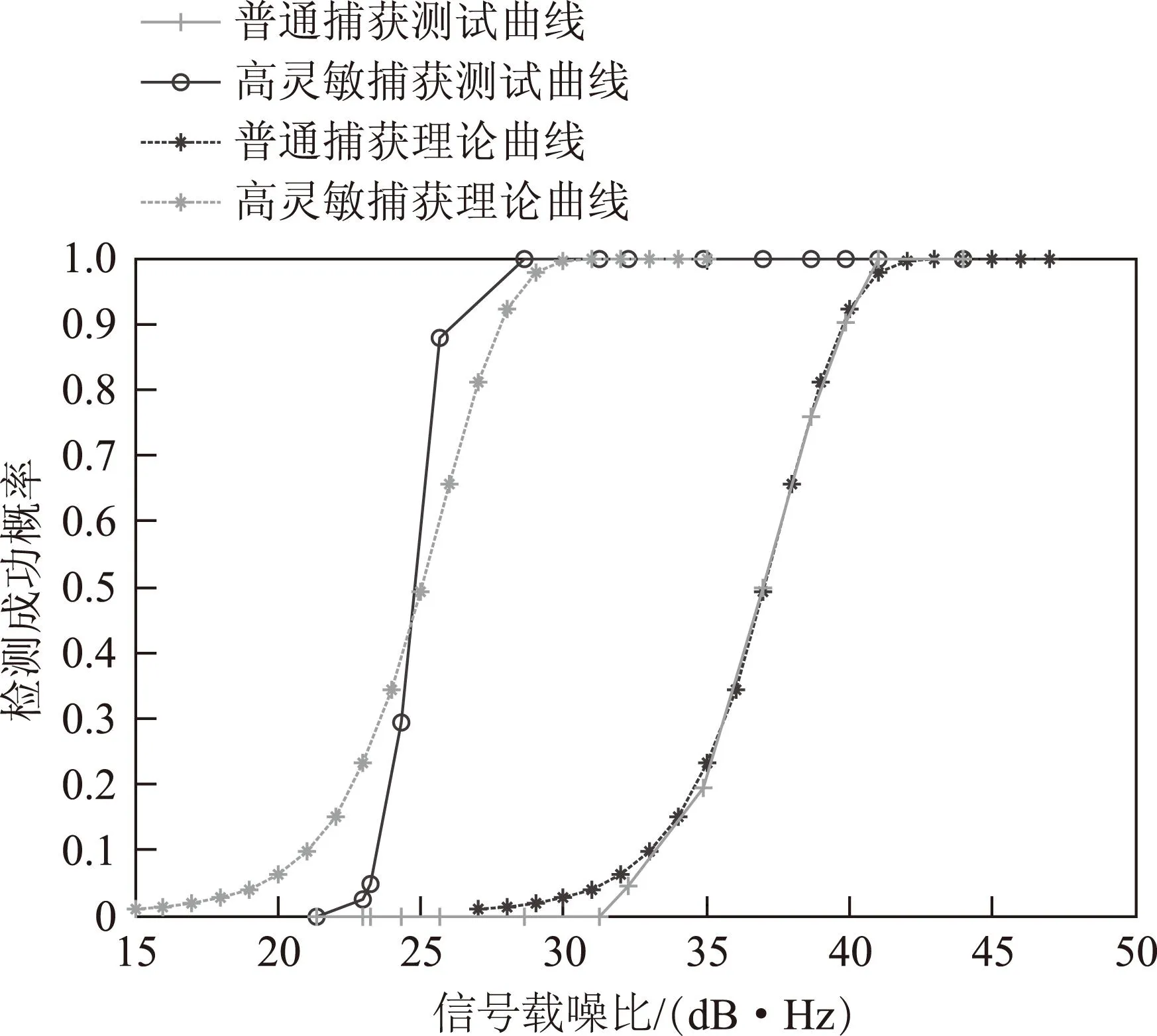
图7 BDS B1I信号捕获灵敏度
3.2GPS L1 C/A 信号测试结果
GPS L1 C/A捕获算法的参数配置与BDS B1I信号一致,普通及高灵敏捕获性能如图8所示。
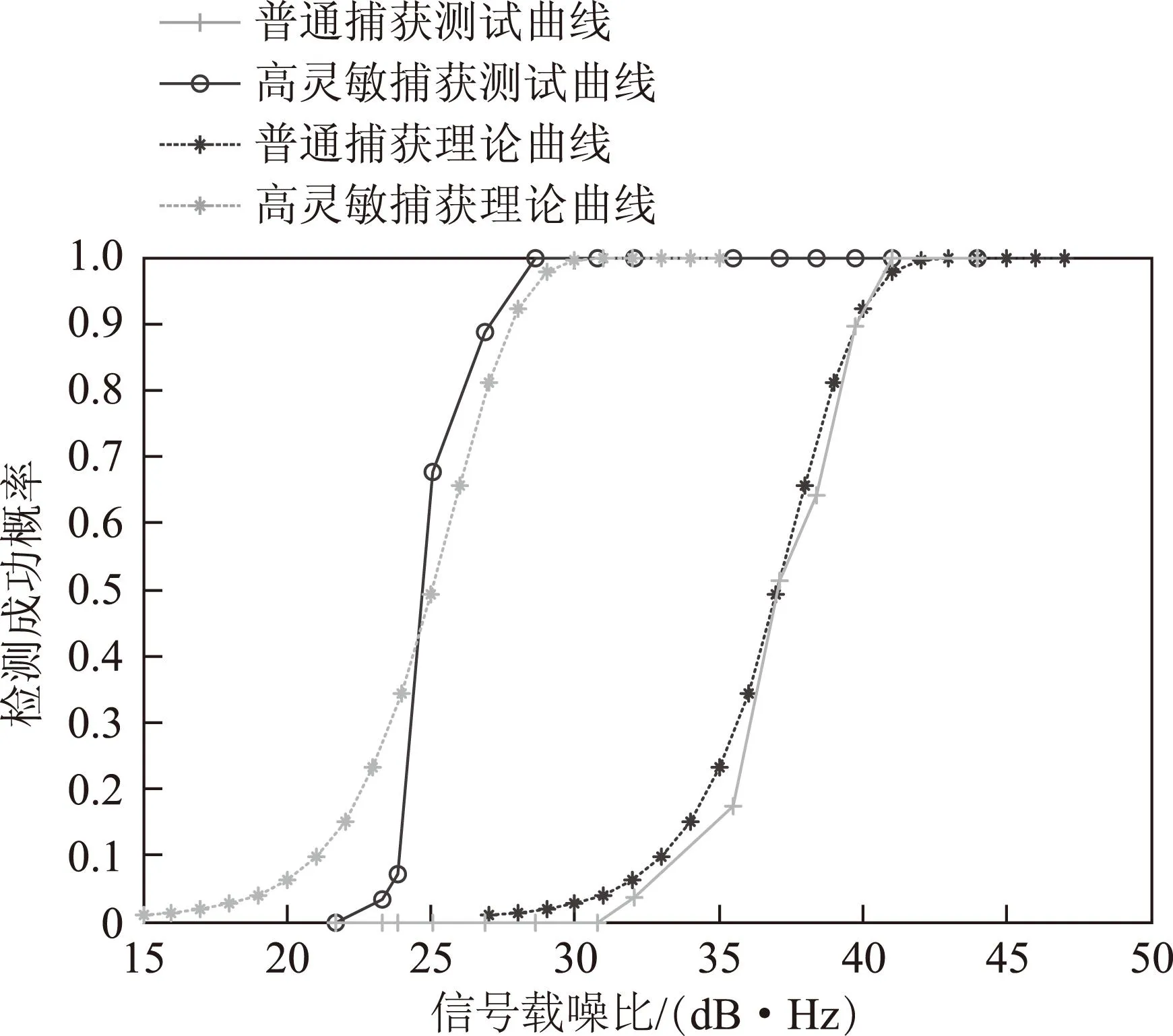
图8 GPS L1 C/A信号捕获灵敏度
4结束语
本文提出了一种兼容型高灵敏捕获算法。该算法可通过接口配置捕获多个频点、多个类型的导航信号。 该算法通过多周期相干积分和非相干积分延长积分时间以实现弱信号的捕获,特别适用于多模高灵敏接收机。此外,笔者还将该算法在FPGA硬件平台上实现,并用BDS B1I信号及GPS L1 C/A信号实际测试了其性能。测试结果表明,该算法具备兼容型功能,只需改变捕获模式设置、高灵敏捕获设置及中心频率三个接口的配置便可以捕获多个类型普通信号及高灵敏信号,捕获灵敏度可以达到26 dB·Hz。
参考文献
[1]王彦玢.北斗卫星导航系统正式提供区域服务[EB/OL].(2012-12-27)[2015-10-29].http://www.beidou.gov.cn/.
[2]赵静,曹冲.GNSS系统及其技术的发展研究[J].全球定位系统,2008,33(5):27-31.
[3]KAPLAN E D,HEGARTY C.Understanding GPS:principles and applications[M].2nd ed.Boston:Artech House,2006:219-223.
[4]SPANGENBERG S M,SCOTT I,MCLAUGHLIN S,et al.An FFT-based approach for fast acquisition in spread spectrum communication systems[J].Wireless Personal Communications,2000,13(1/2):27-55.
[5]何露,鲁振鹏,李健,等.基于部分匹配滤波器和FFT的信号捕获方案的设计与实现[J].科学技术与工程,2012,12(9):2048-2052.
[6]刘艳华,赵刚.基于PMF-FFT的PN码捕获方法及性能[J].通信技术,2009(1):24-26.
[7]LIN D M,TSUI J.An efficient weak signal acquisition algorithm for a software GPS receiver[C]//The Institute of Navigation,Inc.Proceedings of International Technical Meeting of the Satellite Division of the Institute of Navigation(ION GPS 2001).Salt Lake City, Utah:The Institute of Navigation,Inc.,2001:115-136.
[8]费威,应忍冬,刘佩林.GPS/北斗双模导航接收机捕获器硬件设计与优化[J].信息技术,2013(6):4-7.
[9]谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2009:354-355.
[10]李文刚,黄鑫磊,刘龙伟.低信噪比环境下的长码捕获新算法[J].西安电子科技大学学报.2013,40(4):29-36.
Research and Implementation of Compatible High-sensitivity Acquisition Algorithm
LIUYifen,JINTian
(Electronic Information Engineering Institute,Beihang University,Beijing 100191,China)
Abstract:In order to solve the usability problem of multimode receiver in weak signal environments,this article presents a high-sensitivity acquisition algorithm in the main of BDS B1 signals and compatible with multiple system signals.In this paper,partial matched filter algorithm based on fast Fourier transform is chosen as the acquisition method,coherent-non-coherent integration is also used to extend the integration time.The article also achieves the requirement of compatibility,which could acquire multiple signals with High-sensitivity method.In practical applications,the algorithm can start acquisition after getting preset of inputting signal type,center frequency,acquisition mode (Normal/High-sensitivity) via interface.Finally,the algorithm will also be realized on the FPGA hardware platform,and actually tested of the acquisition sensitivity of real signals.The result shows that acquisition sensitivity can reach 26dBHz.
Key words:acquisition;high-sensitivity;compatibility;GNSS;BDS
中图分类号:P228
文献标识码:A
文章编号:2095-4999(2016)-01-0103-06
作者简介:第一刘益芬(1991—),女,湖南益阳人,硕士生,主要从事卫星导航接收机算法研发工作。
基金项目:国家自然科学基金(61471017、41374137、61101076);国防技术基础科研计划支持(J1320130001)。
收稿日期:2015-06-24
引文格式:刘益芬,金天.兼容型高灵敏捕获算法的硬件实现方案[J].导航定位学报,2016,4(1):103-108.(LIU Yifen,JIN Tian.Research and Implementation of Compatible High-sensitivity Acquisition Algorithm[J].Journal of Navigation and Positioning,2016,4(1):103-108.)DOI:10.16547/j.cnki.10-1096.20160120.