BDS支持下的航天器着陆回收指挥平台
2016-04-07 08:41刘灿由郭洪建
导航定位学报 2016年1期
刘灿由,张 威,汪 波,黄 明,郭洪建
(1.西安卫星测控中心 宇航动力学国家重点实验室,西安 710043;2.测绘信息技术总站,西安 710054)
BDS支持下的航天器着陆回收指挥平台
刘灿由1,张威2,汪波1,黄明1,郭洪建1
(1.西安卫星测控中心 宇航动力学国家重点实验室,西安710043;2.测绘信息技术总站,西安710054)
摘要:针对航天器着陆返回后需在大范围区域内进行快速搜救的问题,提出了BDS支持下的航天器着陆回收指挥平台建设方案。该方案利用BDS的导航定位功能,实现对搜索载体的快速定位;利用BDS短报文通信功能,完成各级指挥平台对所属用户的辅助指挥,实现各搜救力量之间的信息传输,完成着陆区航天器态势数据向指挥中心三维GIS系统的传递,并提出了将基于地理信息的空间分析与人的经验相结合实现最优越野路径的规划方法,文中分别阐述方法的原理及步骤,结果表明新方法使得着陆回收指挥平台形成全方位的立体快速搜救能力,满足实际工程需求。
关键词:BDS;着陆返回;搜救指挥;路径规划;人工智能;地毯式搜索
0引言
航天器回收着陆技术是航天技术的重要组成部分,它是随着火箭、导弹、空间技术发展而发展起来,并得到广泛应用的一门综合性应用技术,其涉及的范围很广,而航天器着陆返回最后的搜救工作是整个航天任务过程成败的关键[1-2]。对于载人航天器的搜救,虽然着陆区域范围较小,但考虑到宇航员的安全,要求以最短时间集结空中与地面搜救分队,对时间与应急路径规划方面提出了很高要求;对于非载人航天器的搜救由于散射范围较大,对着陆区域的大范围地形路径规划提出了很大要求[3-4]。总之,根据航天器多种传感器信息及时、快速找到航天器,是目前搜救工作的难点。为此,本文提出了基于北斗卫星导航系统(BeiDou navigation satellite system,BDS)的航天器着陆搜救指挥平台,它集成了多种类型数据包括影像数据、地形数据、路网数据等,并利用BDS进行导航定位与通信,以实现高效的路径规划算法,快速、准确到达航天器的落地点,实现整个搜救工作的智能化。
1平台结构设计
整个航天器着陆回收指挥平台运用三维地理信息系统直观地反映主着陆场地形状况,并根据实时信息提供指挥决策与搜索救援方案,它主要由两部分组成:地面指挥车地理信息系统(geographic information system,GIS)服务端、地面搜救车与空中直升机的GIS客户端。其中,指挥车GIS系统是以统筹全局为目的,配置在主着落场指挥车上提供指挥决策与搜索救援方案的可视化辅助决策系统。该GIS系统核心功能主要有三个,1)实时展示遥测信息,包括弹道、特征点参数、航天器高度-时间表;2)搜集地面分队、空中分队的方位、位置信息,统筹地面与空中搜救任务;3)快速导航,获取到目标位置后,系统自动规划路径,快速导航到目标所在位置。地面搜救车与空中直升机的GIS系统主要用于航天器实时位置显示、三维地形模拟与路径导航,并向指挥车实时发送位置信息。

图1 基于BDS的航天器着陆回收指挥平台结构
如图1所示,航天器着陆回收指挥平台所处理的数据主要包含四种类型影像数据、矢量数据、高程数据以及动态数据。其中,原始影像数据经过切片工具预先切片形成瓦片数据集,瓦片数据集在搜救车的平板上、指挥车的计算机上以及直升机上作为地图数据进行显示;基础矢量数据包含行政区划边界、道路、水系、地名点、高程点或者等高线数据,这些数据通过要素分层配图后存储为文件数据源,基础矢量数据在搜救车、直升机或者指挥车上叠加到影像数据上显示,另外为提高大比例尺的矢量数据实时显示速度,也可将大比例矢量数据切片为矢量瓦片数据集后叠加显示;高程数据(digital elevation model,DEM)通过预处理形成基于地形的路径搜索网络数据,同时DEM通过预切片形成地形瓦片数据集,此地形瓦片数据集是GIS系统实现地形三维模拟的数据基础。另外,为实现回收区各类态势信息向指挥中心传递,平台还需要处理一些动态数据信息,例如受环境影响而变化的地理区域、河流、道路等矢量数据,各搜救车、指挥车、直升机的位置、轨迹,指挥车发送的任务内容等,需要通过BDS短报文的形式实现信息传输,同时指挥车还需要能够接收航天器的遥测信息。直升机在接收到航天器位置信息后,通过GIS系统的目标方位指引,便能很快明确航向,迅速飞向目标,但对于航天器着陆后的处理工作,还需要用到大型的装备,这就需要地面分队通过运输才能抵达,如何根据运输车的行驶条件,找到最佳的搜救路径是该平台的一个关键,以下将对此问题进行深入探讨。
2关键技术算法
各移动载体的BDS定位信息通过BDS短报文的形式传送到指挥车,指挥车的GIS系统需要融合各类数据,并实时计算出各搜救车的最佳搜救路径,然后将搜救方案下发给各搜救车。为实现路径最优规划,本文提出了基于多源数据融合的路径搜索算法,首先需要分析各类数据类型与用途,再根据不同的场景状况采用不同的路径规划方法实现最优路径规划。
2.1路径规划数据
本文将路径规划需要使用的数据细化为以下几种类型,具体包括影像数据、高程数据、基础矢量数据、路网数据以及不可达或危险区域。
影像数据,是指卫星或者航拍的遥感数据,影像数据应该使用尽可能新的数据,其用途是在GIS系统中提供直观的纹理层,以方便搜索人员更准确的判断周围的情况。高程数据的用途存在两种,一种为GIS系统提供三维地形显示,三维场景显示不需要很高精度的DEM,实际使用可以采样到10~30 m精度,第二种为路径规划搜索可行进路线所使用,此种场景下数据格网精度一般要求在1~5 m之间,精度越高路径规划的可靠性越高,通过地形算法计算出某区域内从起点到目标点适合行驶的路线。基础矢量数据包括水系、境界、居民地、道路等基础数据,基础矢量数据主要用于GIS使用过程中能够更方便的参照定位。
路网数据是指已经规划、建设的道路,主要来源于基础矢量数据或事先在着陆场区采集的数据。对于路网数据中的道路和可行进路线,不仅要记录路线定位数据,而且要记录路线的合适级别,如(非常容易行驶,比较容易行驶、晴天可行驶、雨雪天气不可行驶等)。路网数据用于路径搜索时优先使用的路径。不可达或危险的区域数据是指通过现场勘查人员在场区勘察采集到的车辆不可达的区域(如山区、丘陵),危险区域(如沙地、沼泽)等,也可以通过影像数据由专业人员识别不可达或危险的区域,或者通过高程数据使用空间分析算法计算出不可达的区域。对于不可达或危险的区域的数据采集应尽量采用多种方式,单一采集方式有可能不够完全、不够准确。不可达或危险的区域数据并不仅仅是区域数据,同时应该包含一定的环境对区域危险程度的影响,如雨雪天气下为危险区域,但是晴朗天气下则不危险等。不可达或危险的数据用于在路径规划过程中自动实现避开危险区域或者提醒搜索人员注意危险区域。
2.2路径规划方法
基于BDS的航天器着陆回收指挥平台是通过短报文进行动态数据的发收,并通过BDS与遥测数据确认航天器坐标进行路径规划,根据不同的场景状况分为以下三种类型:
(1)理想状态(有路网与目的地)
航天器着陆点位于道路网可以到达的区域或者附近,此路径规划方法可以由通用的最短路径分析功能完成。
(2)非理想状况(无路网,但有目的地)
航天器落地点已知,但是着陆区域内的路网状况未知,需要在常规路网分析的基础之上从高精度DEM数据分析得出最优的越野路线。
(3)特殊状况(无路网且无目的地)
当航天器着陆过程中,其信号发射器出现故障,不能发射航天器位置信号,即不知道着陆场区的路网情况,也不知道航天器实际位置这种情况出现时,只能进行地毯式搜索。搜救直升机先以最快的速度抵达预计落地点进行搜寻,地面搜救分队根据可能的着陆区域展开地毯式搜索。
2.2.1道路网数据可以连通目标位置
目标位置可能位于道路网可以到达的区域或者附近,此路径规划方法可以由通用的路径分析功能完成。对于存在道路网数据、目标位置已知的情况下通过常规道路网分析实现,需要注意的是分析过程需要根据环境的恶劣程度预先剔除不适合行进的路径段,路径分析出来之后应该结合危险避让区域进行叠加分析,提醒搜索人员注意危险区域,必要时考虑危险避让区域与道路网的重叠,剔除重叠的路径段再进行分析,整个流程如图2所示。

图2 路径规划流程
2.2.2无道路网或道路网不可到达目标位置
在没有道路网或者道路网不全,目标位置位于道路网之外的情况需要在常规路网分析的基础之上从高精度DEM数据分析得出行径路线。具体过程如下:
(1)根据DEM计算理论适合行进的区域
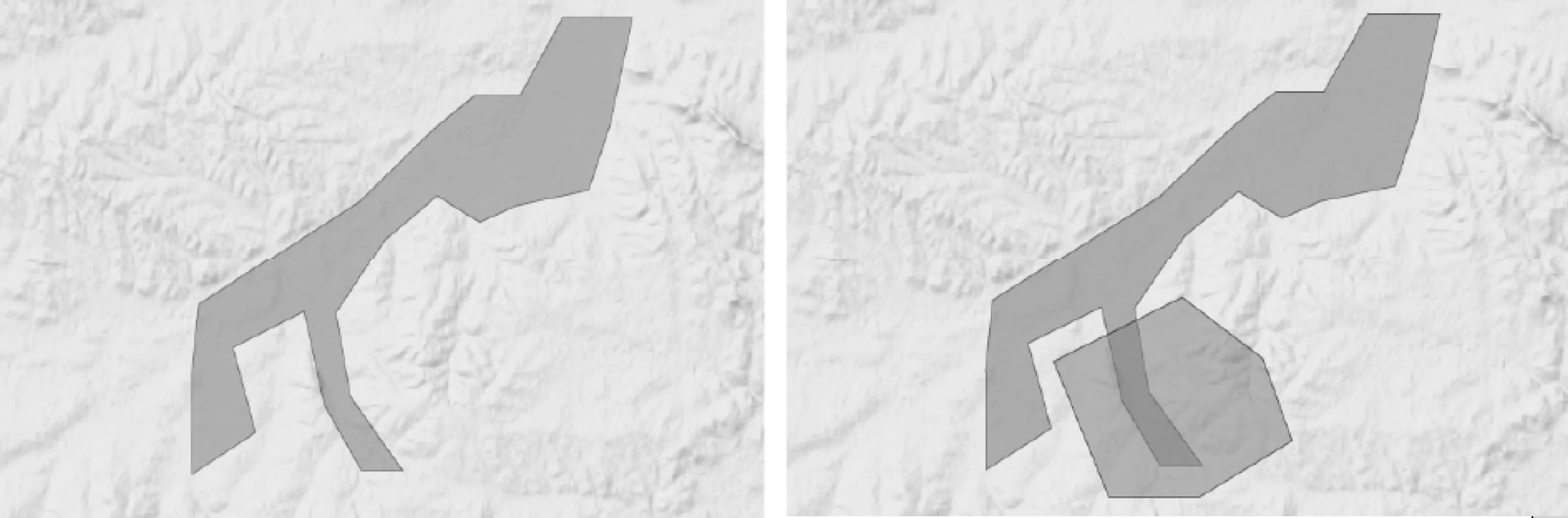
图3 路径规划示意图(左图表示可通行区域,右图叠加了不可达或危险区域)
此过程不需要在搜索现场实时进行,可以事先计算保存结果既可。具体方法是通过对高精度DEM数据采用空间分析算法[5],计算出整个DEM地形范围内所有适合行进的区域范围,所谓适合行进是根据搜索特种车辆的性能要求,地势适合搜索车辆行驶的区域。理论适合行驶区域可以以矢量数据面的形式存储起来,如图3所示。
(2)叠加不可达或危险区域,形成最可能行进区域
理论可行进区域与危险、不可及区域在搜索现场进行叠加分析,这主要是因为危险、不可及区域和现场的气候环境相关,可以根据气候环境来确定哪些区域为不可及、危险区域,通过和理论可行进区域叠加分析,即可从理论可行进区域排除危险区域形成最可能行进的区域,如图3所示。
(3)形成路径搜索走廊
路径搜索走廊是路径搜索结果可能会覆盖的一片区域,路径搜索最优的搜索走廊就是从始发点到目标点之间的一段直线进行缓冲区分析后所得到的区域。

图4 考虑人工干预的路径规划示意图
搜索走廊可以由计算自动生成(即始发点到目标点的直线缓冲区),也可以由有经验的搜索人员在地图上标绘建议路径定义为搜索走廊,如图4所示。
(4)分析参与路径搜索的可行进区域
通过确定的搜索走廊和最可能的行进区域进行相交查询可以确定哪些可行进区域参与到路径规划过程中。
(5)分析可行进区域最优越野路线生成行进路线网
通过对参与路径规划的可行进区域计算出行进时间最短的越野路线,即可得出可行进路线网,如图4所示。
(6)补全破碎的进行路线网
通过最优越野路线分析出来的路线网可能无法构成完整的通达网络,此时需要对各拓扑分离的路线网进行补全[6]。具体方法可以对所有破碎的最优越野路线进行端点间的距离分析,在距离足够近的情况下进行连通,如图5所示。
程序自动补全路线网并不一定都是正确的,通过醒目的标示,程序自动拓扑补全的路线可以借鉴人工势场法[7-8],通过与地形、影像数据结合来确定程序补全的路线是否合理,或者可以由人工来手动补全一些路线。
(7)对生成的路网载入到路网分析流程中规划出搜索路线,如图5所示。
2.2.3地毯式搜索越野路径规划
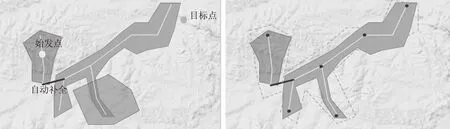
图5 规划路径的自动拓扑示意图
地毯式搜索路径规划的方法可以认为是多次路径规划的过程,与目标位置明确的路径规划不同,地毯式搜索的目标不是到达路径规划终点[9],而是通过多次路径规划形成的搜索走廊进行区域合并,最终实现对整个可能着陆区域的全覆盖。
地毯式搜索路径规划的具体过程如下:
(1)通过人工标绘圈出可疑搜索范围;
(2)通过可疑搜索范围和可行进区域相交查询,得出参与规划可行进区域;
(3)计算可行进区域的最优越野路线构成路线网;
(4)补全路线网;
(5)定义搜索设备车辆可覆盖的观察范围(如附近1 km);
(6)定义地毯式搜索的可能起点;
(7)程序可以通过路网的端点自动生成地毯式搜索的起点,也可以人工添加地毯式搜索的起点;
(8)通过对所有可能的起点排列组合形成多次路径规划,每次路径规划根据观察范围形成搜索走廊的缓冲区。
通过对所有的走廊排列组合计算可行的搜索路线要求达到这样的条件[10]:
(1)所使用的搜索走廊数量最少,
(2)搜索走廊间的重叠区域最小
(3)所有搜索走廊覆盖的区域最大。
3平台实验
基于BDS的航天器着陆回收指挥平台包含三大核心功能,包括:航天器态势信息的实时展示;地面分队与空中分队位置信息搜集,以及相互间的BDS通信;考虑人工干预的最优越野路径规划,统筹地面空中的搜救力量,实现对航天器的立体快速搜救。
3.1航天器实时信息显示
当指挥车接收到航天器的遥测数据后,系统右上角状态栏遥测灯变亮,单击遥测按钮,系统界面上显示实时的遥测信息,主要有实时弹道轨迹、高度-时间表与信号通道,以及屏幕上方的详细信息,如经纬度、高度、预报落点等。
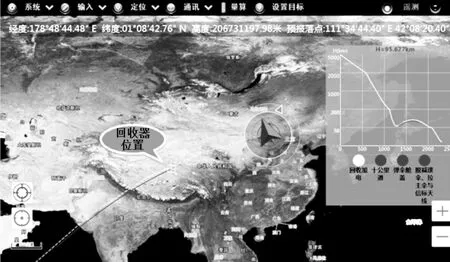
图6 航天器信息显示
3.2各搜救队间的位置关系
以指挥车为中心,可实时看到所有搜救车、直升机到它的距离、方位,其中距离以文字形式展示,方位信息用搜救队与指挥车的连线表示。

图7 搜救队与指挥车的距离、方位信息
3.3考虑人工干预的越野路径规划
航天器着陆回收指挥平台另一个核心功能是考虑人工干预的越野路径规划功能。当目标位置确定后,并可人工干预输入中间点坐标或在图上直接点选位置后,系统将自动进行路径规划。指挥车GIS系统导航获取目标位置的方式有多种包括遥测自动获取、BDS短报文获取、手动输入目标经纬度、以及定向仪角度交会位置。如图8所示当接收到BDS短报文的航天器落点信息时,系统将其自动设置为目标位置,并开始规划路线。

图8 通过BDS短报文获取定位信息并自动导航
4结束语
随着后续载人空间站的常规化,航天器的着陆回收工作将越来越频繁,对航天器的快速搜救工作将提出更高的要求,本文提出的基于BDS的航天器着陆回收指挥平台,对搜救力量的整合与实况信息的互联互通提供了一个基础地理信息平台,并能够将基于地理数据的空间分析与人为的经验相结合,根据不同的场景状况为搜救队快速计算出最优搜救路径,但对于不同搜救力量的协同搜索路径规划还有待于进一步研究。
参考文献
[1]卢波.国外深空探测再入返回技术发展分析[J].国际太空,2014(11):11-17.
[2]卞韩城,黄宁,袁亚军,等.国外载人航天器返回着陆分析与启示[J].载人航天,2011(6):1-7.
[3]闵学龙,潘腾,郭海林.月球返回再入着陆场位置选择限定因素分析[J].航天器工程,2011,20(2):25-29.
[4]葛亚华,卞韩城,李振海,等.空间站工程着陆场航天员应急搜救体系建设研究[J].载人航天,2013(4):23-30.
[5]林笃斌,李欣.基于DEM格网的改进型A*路径搜索算法[J].计算机工程与设计,2011,32(10):3414-3418.
[6]彭松,贾阳.月球车全局路径规划中的A*算法改进[J].航天器工程,2010,19(4):80-85.
[7]况菲,王耀南,张辉.动态环境下基于改进人工势场的机器人实时路径规划仿真研究[J].计算机应用,2005,25(10):2415-2417.
[8]于振中,闫继宏,赵杰,等.改进人工势场法的移动机器人路径规划[J].哈尔滨工业大学学报,2011,43(1):50-55.
[9]蒲兴成,孙凯.一种改进的自适应蚁群算法及其应用研究[J].重庆邮电大学学报(自然科学版),2011,23(3):331-335.
[10]吴天羿,许继恒,刘建永,等.多策略蚁群算法求解越野路径规划[J].解放军理工大学学报(自然科学版),2014,15(2):158-164.
Spacecraft Landing Recovery Command Platform based on BDS
LIUCanyou1,ZHANGWei2,WANGBo1,HUANGMing1,GUOHongjian1
(1.Xi’an Satellite Control Center,State Key Laboratory of Astronautic Dynamics,Xi’an 710043,China;2.Technical Division of Surveying and Mapping,Xi’an 710054,China)
Abstract:For the issues of rapidly searching and rescuing in a wide range after spacecraft landing,the construction scheme of the spacecraft landing recovery command platform based on the support of BDS is proposed.The scheme realizes the rapid positioning of the search vectors by using BDS navigation and positioning function;it also achieves auxiliary command at all levels of command platform,transmits information between the search and rescue forces,transfers landing spacecraft state data to the command center of 3D GIS by using BDS short message communication function.This paper presents method of combining geographic information spatial analysis and experience to achieve best off-road path,and explains in detail the principle of the method and steps.The results show that the new method makes landing recovery command platform to form a full range of three-dimensional rapid search and rescue capabilities,and meet the needs of practical engineering.
Key words:BDS;landing recovery;rescue command;path planning;artificial intelligence;blanket search
中图分类号:P228
文献标识码:A
文章编号:2095-4999(2016)-01-0010-06
作者简介:第一刘灿由(1985—),男,福建省泉州市人,工程师,博士,现主要从事航天测控等科研和应用方面工作。
收稿日期:2015-05-18
引文格式:刘灿由,张威,汪波,等.BDS支持下的航天器着陆回收指挥平台[J].导航定位学报,2016,4(1):10-15.(LIU Canyou,ZHANG Wei,WANG Bo,et al.Spacecraft Landing Recovery Command Platform based on BDS[J].Journal of Navigation and Positioning,2016,4(1):10-15.)DOI:10.16547/j.cnki.10-1096.20160103.
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
中国交通信息化(2022年6期)2022-08-30
国际太空(2022年7期)2022-08-16
中国交通信息化(2022年3期)2022-06-01
数学小灵通·3-4年级(2020年11期)2020-12-14
数学小灵通·3-4年级(2020年3期)2020-06-24
国际太空(2019年9期)2019-10-23
国际太空(2018年12期)2019-01-28
国际太空(2018年9期)2018-10-18
环球飞行(2018年7期)2018-06-27