一种高精度双模定位的智能公交报站系统
2016-04-07 08:41姚晨雨冷明鑫
导航定位学报 2016年1期
王 璞,姚晨雨,冷明鑫,毛 琪
(东南大学 仪器科学与工程学院,南京 210000)
一种高精度双模定位的智能公交报站系统
王璞,姚晨雨,冷明鑫,毛琪
(东南大学 仪器科学与工程学院,南京210000)
摘要:本文针对现有的公交报站终端大多存在定位模式单一、精度低和数据传输不稳定等不足,提出了采用BDS/GPS双系统融合定位模块、无线数传模块与连续运行卫星定位服务综合系统相结合的改进型智能公交报站系统,保证了在高楼和林荫等遮挡环境下定位的准确性和通信的稳定性、实时性。测试结果表明,该系统的定位精度达到亚米级,可以实现车道级导航,具有较好的应用前景。
关键词:BDS/GPS组合定位;伪距差分;CORS系统;智能公交;车道级导航
0引言
城市公共交通是城市经济生活的命脉,然而目前城市公交系统却存在着不少问题[1]:车辆在行驶过程中与调度系统缺乏信息化反馈机制、站台等车乘客得不到公交行驶信息、驾驶员仍采用操作繁琐的手动报站器等等,要解决这些问题,必须发展信息化、网络化的智能公交系统,对公交车辆进行实时定位并统一管理。
公交车现在普遍使用手动按键报站器,当车辆进出站台、拐弯下行时,驾驶员需要对报站器进行手动操作,向乘客播报提醒信息。但这些时刻公交车面临的路况往往较为复杂,驾驶员既要对车辆进行操作,同时还要兼顾报站器,有一定的安全隐患,因此建设智能化报站系统很有必要。目前的智能化报站方法有两种:基于卫星定位与基于非卫星定位。基于非卫星定位的方法有红外等[2],成本较低,但是能做到的仅仅是提供报站信息,不利于构建更加完善合理的公交调度系统;基于卫星定位的智能报站器不仅可以提供报站信息,还可以将定位信息发送给公交调度中心,对于车辆调度、应急处理、信息交互等方面有积极作用,实现更加科学的管理和服务。
现存的基于卫星定位的自动报站器,大都只使用了全球定位系统(global positioning system,GPS)单模式定位[3-4],由于受到市区高层建筑、林荫树木等因素影响,单模式接收机有时会因可搜索到卫星信号数目的减少无法输出有效信息,而且定位精度也十分有限;同时现有设备大多数没有通过网络与公交调度系统形成可靠互联,无法把定位结果上传,以便后续的管理和服务。针对以上问题,本文提出了一种改进型的自动报站器,使用北斗卫星导航系统(BeiDou navigation satellite system,BDS)/GPS双模式定位技术,增加卫星信号,提高定位精度,同时加入第四代移动通信技术(the 4th generation,4G),达到快速连接连续运行卫星定位服务综合系统(continuously operational reference system,CORS)基准站进行差分定位,实现亚米级定位和与调度中心保持联系的目的。
1框架结构设计
整个报站系统分为人机交互模块和内置高精度定位系统两个部分。人机交互模块包括用于播报提示信息的语音模块,显示公交线路及站台信息的显示器以及操作按钮。在进行自动报站前,需要事先将播报信息的位置点坐标和对应的提示语记录在安全数码卡(secure digital memory card,SD)中,对于相同行驶路线的公交车可以直接复制SD卡中的信息。在公交车正常运行过程中,报站器会根据内置定位系统获得的高精度定位信息,在SD卡存储坐标点的允许误差范围内进行自动报站。同时SD卡中信息可以人工擦除用于公交线路的更改。本系统还设有手动报站模式供给特殊情况下使用。
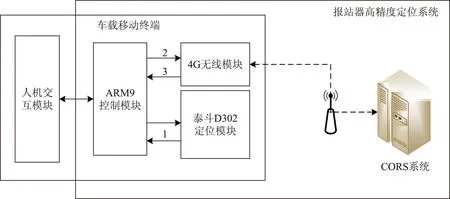
图1 智能公交报站系统系统框图
报站器内置的高精度定位系统为整个系统的核心,可以实现亚米级定位功能,主要包括车载移动终端的定位部分和CORS系统。车载终端定位部分包括:泰斗定位模块、4G模块和ARM9控制模块。泰斗定位模块用于原始定位信息的获取,ARM9控制模块用于实现原始观测数据的解析与伪距差分算法,CORS系统用于提供伪距差分所需的差分改正数。其总体结构框图如图1所示。当通过定位系统获得的定位结果和存储在SD卡中的地理点坐标在误差范围内相符时,自动报站系统会通过语音模块和显示器播报相应提示信息。
智能公交报站系统准确报站的基础是能够获得高精度的位置信息,而现有系统多采用单一GPS或者单一BDS通过单点定位的方式进行公交车位置的定位。同时目前所使用的定位算法需要在卫星数目大于等于4颗时才可以正确解算,当公交车行驶在城市多高楼多树木的区域内时,单一定位系统的卫星跟踪数目将无法满足要求,因此本系统采用BDS兼容GPS的定位模块,并经过现有论文和实验的论证,保证了卫星数目,提高了定位准确度[5-6]。由于卫星的精度普遍误差在8~10 m,传统单点定位精度较低,本系统采用实时动态码相位差分技术(real time differential,RTD),结合CORS基站实时动态修正定位坐标可以达到亚米级定位。在城市车辆导航中,亚米级定位已经可以达到具体车道的定位,提高报站器工作准确性,也为公交车调度管理,例如拥堵车道避开指示、特殊路段公共车辆先行等提供了可能。
2硬件设计
改进后的系统具有高精度的优势,硬件核心部分包括S3C2440处理器、卫星定位模块和无线数传模块。
2.1S3C2440处理器
控制模块采用以ARM9为内核的S3C2440芯片,并在其上移植Linux操作系统。ARM嵌入式设备体积小、功耗低、功能强,该处理器运行于400 MHz,处理速度快,操作系统支持多线程处理,是高性能车载导航应用的理想选择。
2.2卫星定位模块
卫星定位模块采用泰斗D302 BD2 B1/GPS L1频点双模导航定位模块,支持BDS/GPS双模工作模式。本装置只采集卫星模块的原始观测量,在后续处理中自主使用CORS基站信号进行高精度的差分解算。
2.3无线数传模块
无线数传模块采用中兴ME3860 4G通信模块,其传输速率上行最高到50 Mbps,下行最高150 Mbps。支持Linux操作系统,与控制器通过通用串行总线(universal serial bus,USB)接口进行连接,系统采用加载驱动后通过AT指令获取动态网络协议(Internet protocol,IP)的方式接入无线网络。
3软件设计
系统核心软件由三个线程组成,线程一为差分改正数据的获取与解码,数据的传输遵循Ntrip协议;线程二为原始观测数据的获取与解码,数据的传输是通过串口由D302模块传送给ARM板;线程三为RTD解算,得到亚米级的定位信息。
3.1数据的接入
车载终端与CORS系统间的数据传输遵循基于传输控制协议/因特网互联协议(transmission control protocol/Internet protocol,TCP/IP)的Ntrip协议。
3.2数据解码模块
数据解码模块用以完成原始观测数据解码和RTCM差分电文解码。电文解码类似于事后解码,从网络中接收到二进制数据块之后,根据数据消息块标识确定数据类型,再根据数据类型的定义进行相应的数据提取与转换[7-8]。具体流程如图2所示。
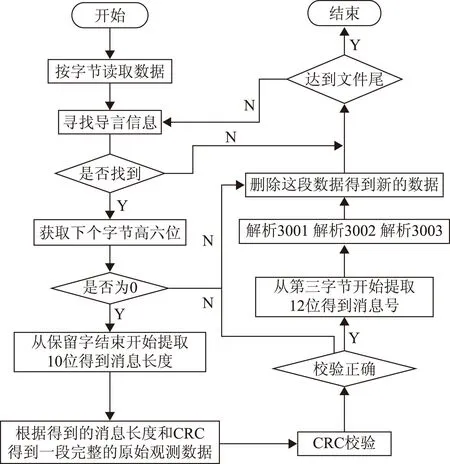
图2 原始数据解码流程图
3.3定位解算模块
本系统中由S3C2440处理器结合接收到的差分改正数与移动终端原始观测信息完成定位解算,采用的是实时差分动态定位的方式。利用设置在坐标已知的点(基准站)上的BDS/GPS接收机测定BDS/GPS测量定位误差,用以提高在一定范围内其他BDS/GPS接收机(流动站)测量定位精度。即在基准站上,观测所有卫星,根据基准站的精确坐标和各卫星的坐标,求出每颗卫星每一时刻到基准站的真实距离。再与测得的伪距比较,得出伪距改正数,将其传输至运动载体上的接收机来改正测量的伪距,提高定位精度。
4定位精度测试
由于本系统主要对报站系统进行定位精度上的改进,因此测试阶段仅验证定位系统经过差分改正后的定位精度。测试过程如下:
1)选取东南大学3S中心实验室自主研发的EarthNet2.0为CORS服务软件建立RTD单基站模式。同时,车载终端所接入的卫星天线的坐标已知,其经纬度坐标为(32.058 137 239°N,118.788 552 719°E)。
2)用车载终端(图3)对同一点进行半小时的静待定位测试,得到GGA定位信息,截取部分见表1所示:

图3 定位系统实物图
3)将所得GGA中的经纬度信息按照度分的形式表示,并将结果由大地坐标系B、L、H转换成空间直角坐标系N、E、U[9-10]。定位精度分为平面精度与高程精度,对于地面导航定位一般只需要验证平面精度,即N、E方向的误差,因此,对定位结果与标准坐标点计算N、E方向定位误差,并将定位误差按照5 s的间隔采样得到两个方向上的定位偏差图,如图4所示。

表1 GGA定位信息
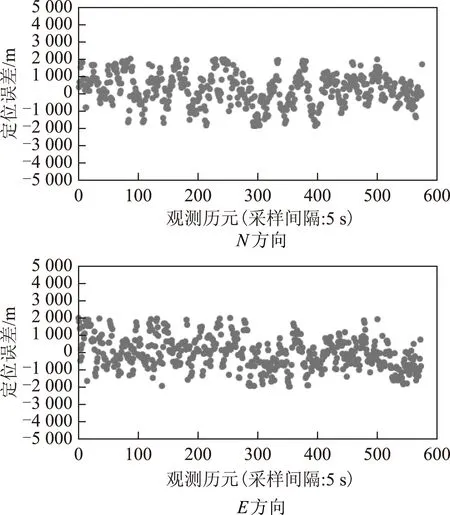
图4 定位系统定位偏差图
从图4中可以看出,在半个小时的测试时间内,定位结果比较稳定,大部分点的定位N、E方向的偏差优于1 m。
以上测试结果表明,该定位系统具有亚米级的定位精度,为智能公交报站系统准确报站提供了基础。
5结束语
随着社会的快速发展,公共交通建设必然越来越重要,本文所实现的高精度智能公交报站系统由于具有可定位到车道的优势不仅可以实现报站功能,还可以实现与公交车管理系统的信息交互,完成对公交车的调度。
在未来的应用上,拥有亚米级定位精度的车载终端不仅可以在智能公交管理中大放异彩,也可以移植到普通车辆上实现路径规划和车辆导航,移植到警车、消防车、救护车等特殊车辆上实现车辆优先控制,移植到特殊物品运输车辆上实现车辆安全监管功能。
参考文献
[1]邓健,王庆,潘树国,等.基于多参考站的分米级GPS伪距差分定位方法[J].东南大学学报(自然科学版),2010,40(2):316-319.
[2]杨徉,潘树国,汪登辉,等.北斗地基增强系统软件(EarthNet2.0)及其应用[J].测绘通报,2014(10):46-49,85.
[3]刘鲁玉,吴旭光,张竞凯,等.基于GPS的公交调度系统智能报站器的设计与实现[J].电子测量技术,2008,31(2):99-102.
[4]黄金明.基于ARM9的公交车智能报站系统的设计[J].自动化仪表,2008,29(4):53-55.
[5]任思佳,关可.北斗/GPS双模车载终端对静态定位精度的影响[J].信息通信,2014(4):22-22,23.
[6]刘永明,张云,袁国良.GPS/北斗-2组合定位性能的研究[J].电子设计工程,2013(14):121-126
[7]祁芳,林鸿.Ntrip协议在CORS系统中的应用[J].城市勘测,2008(1):82-85.
[8]史小雨,程鹏飞,蔡艳辉,等.差分GPS数据通信格式RTCM3.1及其解码算法的实现[J].测绘通报,2012(6):4-6,67.
[9]凌震莹.大地坐标系与站心地平直角坐标系的坐标转换[J].声学与电子工程,2009(4):31-34.
[10]黄张裕,杨志文,丁旭,等.基于CORS的逆向RTD系统的关键技术和可行性研究[J].工程勘察,2012,40(10):56-59,64.
An Intelligent Bus Stop Announcement System with Precision Dual-system Navigation
WANGPu,YAOChenyu,LENGMingxin,MAOQi
(School of Instrument Science and Engineering,Southeast University,Nanjing 210000,China)
Abstract:Nowadays existing bus stop announcement systems have deficiencies in single positioning mode,low accuracy and unstable data transmission.This paper focuses on a new smart bus stop announcement system combining with BDS and GPS Dulan-system Navigation module,wireless data transmission module and the CORS.The new announcement system guarantees the accurate positioning and stably real-time communication.Experiments showed that the system reached 1m accuracy and could realize lane-level navigation.
Key words:BDS/GPS integrated positioning system;pseudo-range difference;CORS;smart bus system;lane-level positioning
中图分类号:P228
文献标识码:A
文章编号:2095-4999(2016)-01-0055-04
作者简介:第一王璞(1994—),女,安徽寿县人,本科,研究方向为测控技术与仪器。
收稿日期:2015-05-13
引文格式:王璞,姚晨雨,冷明鑫,等.一种高精度双模定位的智能公交报站系统[J].导航定位学报,2016,4(1):55-58.(WANG Pu,YAO Chenyu,LENG Mingxin,et al.An Intelligent Bus Stop Announcement System with Precision Dual-system Navigation[J].Journal of Navigation and Positioning,2016,4(1):55-58.)DOI:10.16547/j.cnki.10-1096.20160111.