采用帧转移CCD的Smear校正通道恢复饱和图像通道的方法研究
2016-03-27 01:44张腾飞王宏博黄小仙
红外技术 2016年1期
张腾飞,王宏博,黄小仙,危 峻,马 亮
采用帧转移CCD的Smear校正通道恢复饱和图像通道的方法研究
张腾飞1,2,王宏博1,2,黄小仙1,危 峻1,马 亮1,2
(1. 中国科学院上海技术物理研究所,上海 200083;2. 中国科学院大学,北京 100049)
海洋水色遥感应用对光学遥感仪器提出了高灵敏度与高精度的要求。本文研究的可见近红外成像光谱仪采用推扫扫描的方式,从而获得了较高的灵敏度;通过对系统进行杂散光定标和校正实现高精度测量。杂散光校正算法要求图像中所有目标信号不能饱和。由于仪器的动态范围针对水色目标设置,因而大部分图像通道高亮度的云目标信号会饱和,导致杂散光校正算法无法获得较好效果。以一台基于帧转移面阵CCD的推扫式可见近红外成像光谱仪为研究对象,通过分析系统设置的CCD Smear校正通道的成像机理,论证了在不同光源下Smear通道和各图像通道间均存在线性相关性,进而提出了一种利用Smear校正通道来恢复各图像通道饱和信号的方法,为星上高光谱图像的杂散光校正提供有效的数据源,也为饱和图像恢复提供了一种较为可行的方法。
帧转移面阵CCD;Smear校正通道;杂散光;饱和信号恢复
0 引言
海洋水色遥感是指利用卫星上搭载的遥感仪器获得的海洋表层离水辐射量来研究海洋现象或海洋过程的新兴遥感技术,被广泛地应用到气象预报、渔业规划、环境监测及领土划分等领域[1]。
海洋水色探测要素主要包含在离水辐射量中,其能量一般约为陆地目标的10%。空气分子和气溶胶的后向散射辐射在可见光谱区大气顶辐射率中占绝对优势(80%以上),这对遥感仪器提出了高灵敏度要求。许多高级应用主要靠极少量信号的反演,如果水色信息达不到必要的精度和准确度,遥感仪器多波段的用途可能丧失[2]。
本文研究的一台基于光栅分光和帧转移面阵CCD的推扫型可见近红外成像光谱仪(以下简称“仪器”),主要用于海洋水色遥感,光谱范围0.4~1.04mm,根据系统指标要求,仪器设置了14个默认图像通道和1个Smear校正通道。为了满足仪器的高灵敏度要求,采用了推扫扫描成像方式,利用较长的像元驻留时间提高仪器的信噪比。通常系统的灵敏度和动态范围性能需折衷平衡,该仪器针对海洋水色目标的动态范围设置,因而比较亮的云目标信号很容易饱和,同时,分光系统的狭缝在沿轨和穿轨方向之比约为1/1000左右,导致仪器在两个方向上存在极大的杂散光分布差异。由于海洋富含大量水分,在太阳照射下生成了大量云,因此云在海洋遥感图像中往往占据很大比例[3],相关数据表明:同样应用于海洋水色的遥感器HY-1A与HY-1B上获取的数据一半以上被云覆盖。由于海洋水色目标较弱,云等高亮度目标对海色遥感带来的杂散光会影响定量化应用,所以,对于大片云所引起的杂光影响必须予以校正和消除。
为了消除图像中的杂散光影响,首先要建立合适的杂散光模型,并保证获取的图像信息真实有效。较亮的云目标信号容易饱和,而杂光很大程度上来自于云的影响,因此,对于较亮的云目标饱和部分的数据,需要合适的方法在一定程度上进行恢复,为杂散光校正算法提供有效的数据源。
1 利用Smear校正通道进行饱和恢复可行性分析
1.1 Smear校正通道
本文研究的仪器采用了e2v公司的一款帧转移型面阵CCD探测器。电荷转移通过帧转移、行转移和像素读出3个步骤完成,当像元完成目标的有效积分后,从光敏区到存储区的帧转移过程中,不希望的积分仍在进行,前一行的光敏元就会对后一行的光敏元造成影响,最终反映在图像中表现为沿电荷转移方向延伸的“拖尾”,又称之为Smear现象[4]。
为了消除拖尾的影响,仪器设置了专用的Smear通道,位于CCD边缘处最先被读出的几行,这几行被专门设计的遮光壳遮盖,形成不会受到任何有效光照射的光学暗行,这些暗行的输出即是拖尾信号[5]。Smear通道仅在快速的帧转移过程中获取目标辐射,积分时间短,因此观察比较亮的云目标时,Smear通道信号也不会饱和。
1.2 Smear通道与图像通道间的相关性
面阵CCD的拖尾现象只发生在同列像元之内,以CCD上的某一列作为分析对象。假设面阵CCD共有个有效光谱响应行,其中,第行像元的信号积分速率为()(单位为DN/s),CCD的积分时间为,则第行的有效信号为:
()=×() (1)
假设帧转移期间,某个光谱响应行的电荷包在其他各行的驻留时间(即转移一行的时间)为,则第行数据中的拖尾信号为:
那么第行的实际信号为:

对于第行的实际信号来说,它与拖尾信号的关系为:
由式(4)可知,对于一个光谱分布确定的目标,单个光谱响应行的目标信号与“拖尾”信号呈线性关系。同理,由多个光谱响应行累积构成的图像通道与Smear通道的信号,也是一个确定的线性关系。因此,在标定Smear通道与其他图像通道的线性关系后,图像通道出现饱和失真时,可以利用不饱和的Smear通道数据,来恢复图像通道中饱和的数据。
2 积分球数据关联性及其饱和恢复结果
2.1 积分球图像通道饱和现象及其与Smear通道的线性关系
为了验证上述方法,以积分球作为光源进行试验,将仪器入瞳置于积分球出口,调节积分球内部开启的灯源数,来获取所有通道的数据。出于稳定性考虑,调节开启灯源数的过程是由开启多盏灯逐步递减直至全部关闭。开启的灯源较少时,由于输入的能量较弱,各个通道信号均不会饱和,当开启的灯源增多时,Smear通道和其他图像通道的DN值都在增大,直到部分能量较高的通道出现饱和,这时随开启灯数的增加,Smear通道(配置为第1通道)的DN值继续增加,已饱和的图像通道DN值不再增大。
以仪器第9通道为例,随着开启灯源个数的变化(从7递减到0盏),其DN值随Smear通道的DN值而变化,其中空间维第512和第980像素点变化情况如图1所示。
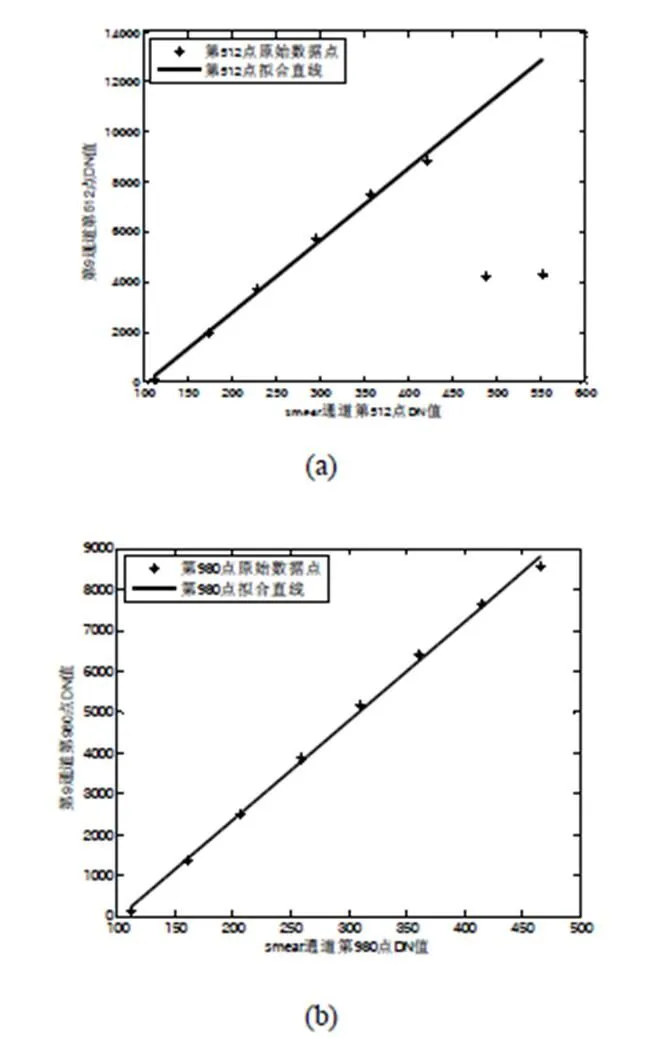
图1 第512点(a)和980点(b)第9通道与smear通道的关系
图1(a)可以看出,开启5盏灯之后,第9通道的第512像素点已经饱和,继续增加开启的灯数,第9通道信号出现饱和与深度饱和反转现象。而图1(b)所示,此时第980像素点的DN值仍继续增加,该点在开启7盏灯后开始饱和,但未达到深度饱和反转。两点的现象不同,说明不同像元间有目标源辐射或系统响应不一致等因素存在。
图1中两个不同的目标点,在图像通道数据没有饱和时,Smear通道与图像通道表现出比较理想的线性关系。分别计算这两点Smear通道和第9通道的相关系数[6],得到9(512)=0.9982,9(980)=0.9990,表明两通道数据是比较理想的线性关系。
2.2 积分球饱和数据恢复的方法
利用Smear通道对图像通道进行饱和判断及饱和数据恢复的方法如下:
1)利用仪器获取某目标点各通道数据,将Smear通道数据作为自变量数组,其他各图像通道数据分别作为应变量数组Y(=2, 3, 4, …, 15),将数组Y与数组中的元素一一对应。
2)数组中的元素按照从小到大的顺序重新排列,中的每个元素所对应的Y中的各元素也随之重新排列。
3)找到某通道Y的最大值的位置,若Y最大值处对应的也是它的最大值,说明该通道并未出现饱和,不需处理;
4)如果Y最大值对应的并不是其最大值,说明Y最大值之后的数据已经饱和,需要恢复。由于Y最大值之前的数据是真实可信的,对于这部分数据和它们各自对应的,利用最小二乘法,拟合出两者的线性关系,由此得到Smear通道和该通道的线性关系;
5)Y最大值之后的数据,认为其已经饱和,利用第5步求出的线性关系和Y最大值之后数据所对应的,可以恢复出饱和的数据。
2.3 积分球饱和数据恢复结果
利用上述方法,对各图像通道所有像素点进行饱和判断与恢复,其中第8通道的结果如图2所示。
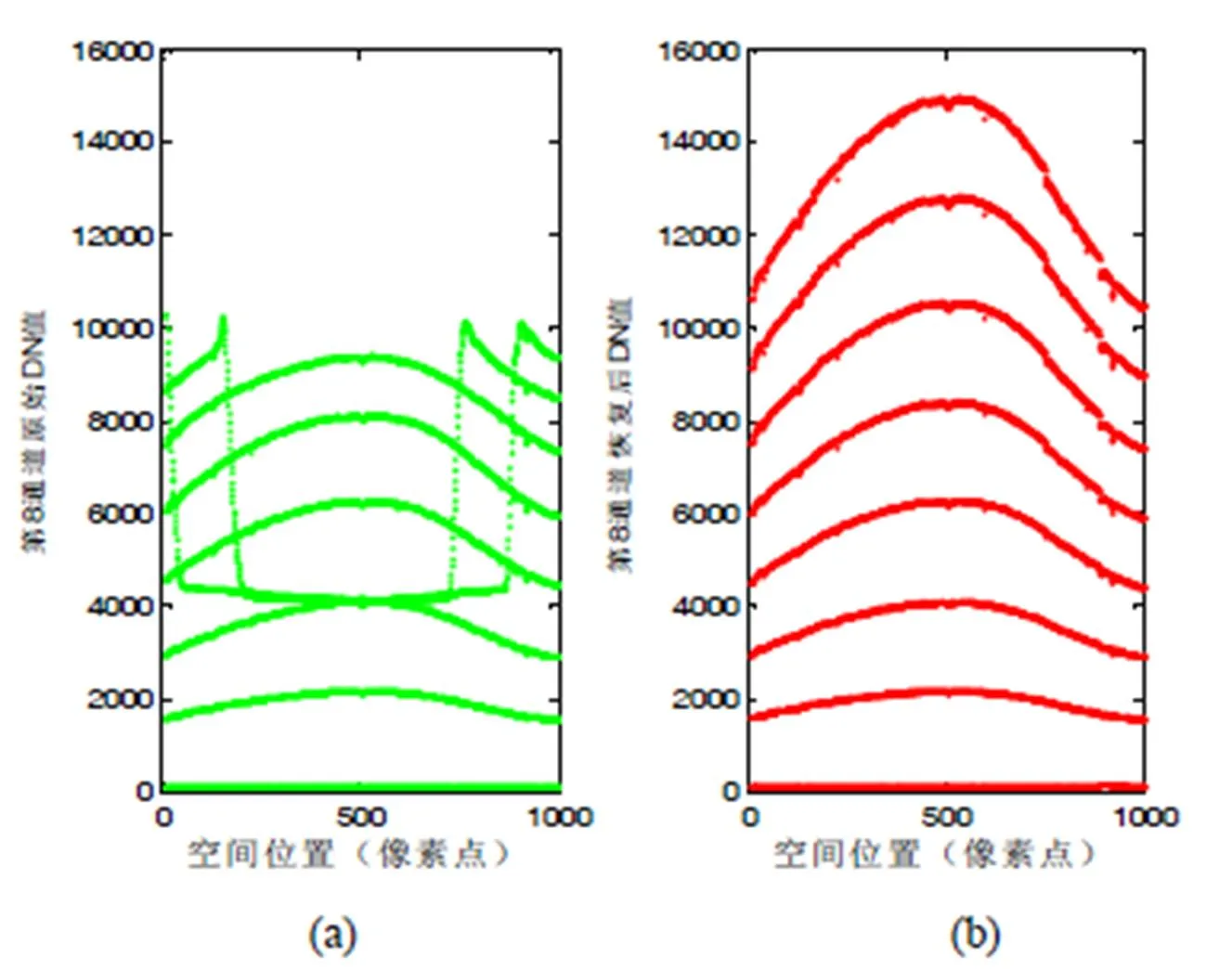
图2 (a)所有位置第8通道原始数据(b)所有位置第8通道饱和恢复后数据
由图2(a)可以看出,开启5盏灯源时,第8通道的部分像素点出现饱和现象,而开启6、7盏灯时,部分像素点出现明显的饱和反转现象,由图2(b)可以看出,饱和像素点数据已经恢复。
由此,对于图像通道的饱和数据,找到了一种合适的恢复方法。
3 太阳光源下饱和恢复的可行性分析
3.1 积分球与太阳的光谱分布差异
上述实验验证了以积分球为光源时,Smear通道与各图像通道为线性关系,而仪器在轨运行时,探测目标的光源是太阳,积分球与太阳能量的光谱分布如图3所示。
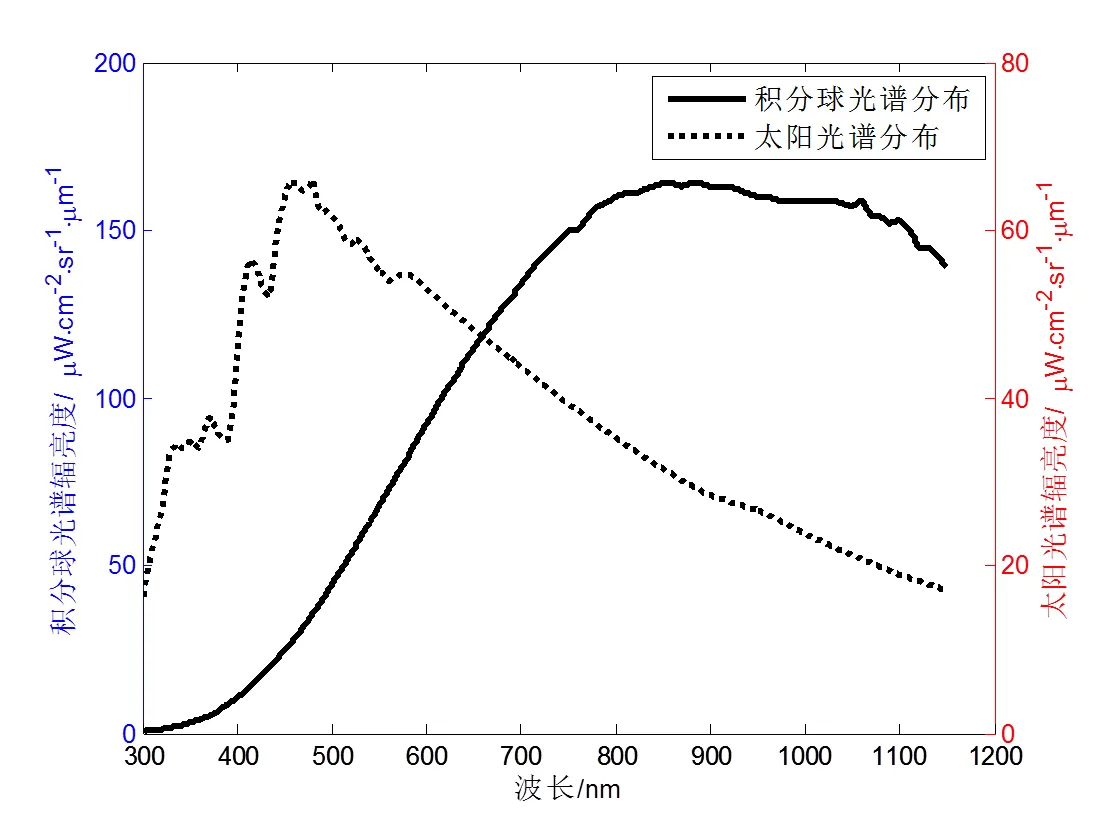
图3 积分球和太阳能量的光谱分布差异
可以看出,积分球与太阳能量的光谱分布并不一致,未来需要对在轨图像进行处理,因此,需要对太阳光源下Smear通道与图像通道是否存在线性关系进行验证。
3.2 利用太阳照射下的漫反射灰阶板验证通道之间的响应关系
根据云的种类不同,低反射的云反射率约在20~70%之间,高反射的白云在可见光、近红外波段具有较高反射率,在可见光范围内的反射率甚至接近于1[7]。遥感仪器在轨运行时,云反射的是太阳光,因此,可以在地面上利用漫反射灰阶板来模拟仪器在轨运行时不同反射率的云目标。
在2种积分时间下,分别利用3组反射率不同的灰阶板来获取数据,由此得到了6种条件下的数据。以仪器第8通道第512点为例,它与该点Smear通道信号的关系如图4所示。图中的6个点分别表示在6种条件下获取的该点数据。
由图4可以看出,对于确定的目标点,目标反射率以及仪器的积分时间不同时,Smear通道和图像通道间依然存在比较理想的线性关系,求得的相关系数8(512)=1.0000。拟合后残差的标准差[6]为9(512)=9.2138,它与DN值中值的比例为0.142%。
此时该点第8通道并未饱和,与Smear通道之间存在良好的线性关系。在太阳光下,如果能量较强出现饱和时,同样可以采用前文所述的方法,利用拟合得到的两者的线性关系,进行饱和数据的恢复。

图4 不同反射率和积分条件下第512点第8通道和Smear通道的关系
4 全视场图像饱和恢复的可行性分析
由前文可知,对于确定的目标点,在积分球和太阳两种光源下,都可以利用Smear通道来恢复图像通道饱和的数据。对于经过非均匀校正的全视场图像中存在的饱和现象,可否采用同一组系数进行恢复?本节对分别采用积分球与太阳光两种光源获取的全视场图像数据进行分析。
上述积分球实验中,分别开不同盏灯,获得视场内所有目标点各个通道的数据。对于每个通道,将所有开灯情况下的所有目标点的数据合并,由此获得15组数据,以Smear通道数据为自变量,其他各图像通道的数据作为应变量Y(=2,3,4,…,15),将和Y中的每个元素一一对应,利用前述的方法试进行饱和判断及恢复,以第4通道为例,它与Smear通道间的线性关系及饱和恢复后的结果如图5所示。
由图5可以看出,由于使用了整个视场的数据,数据点更加密集,图中不连续的地方是开启灯源个数变化的交界处。虽然这些目标点不是同一点,但由于积分球不同目标点的光谱基本一致,第4通道未饱和的部分和Smear通道依然呈现很好的线性关系,两者相关系数为4(all)=0.9947,这也进一步证实了这种线性关系,拟合后残差的标准差相对于DN值中值的比例为4(all)=4.43%。
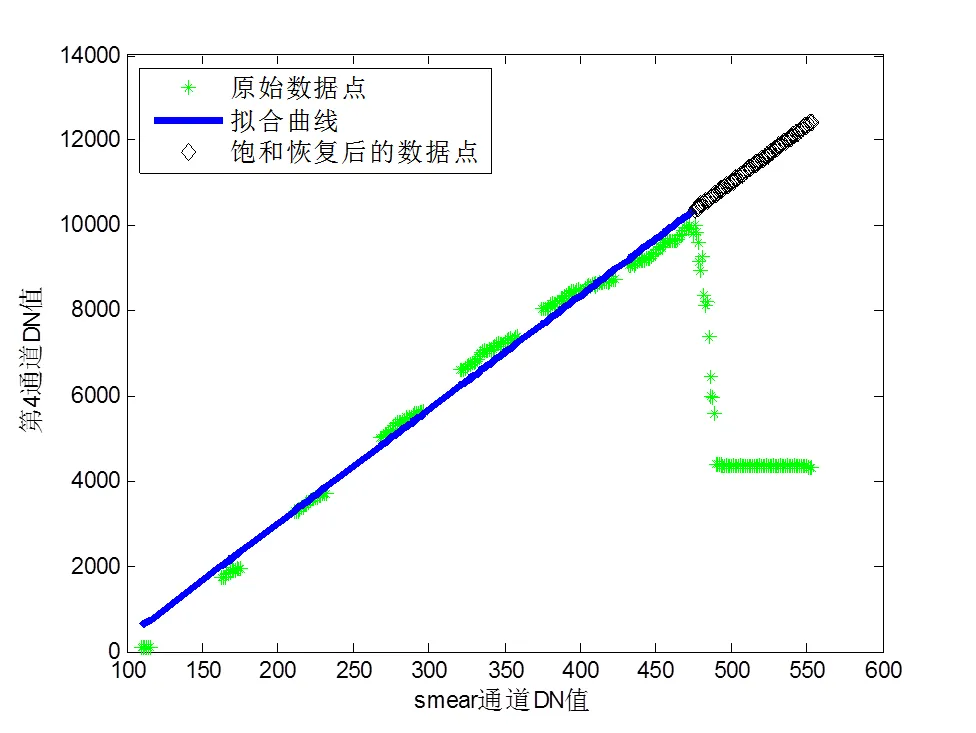
图5 积分球全视场数据线性相关性及饱和恢复结果
以太阳为光源的漫反射灰阶板实验中,分别改变目标的反射率和改变仪器的积分时间,得到视场内所有目标点各个通道的数据,用同样的办法,对于每个通道,将所有数据合并,由此获得15组数据,并由此确定图像通道与Smear通道是否存在线性相关性。以第10通道为例,结果如图6所示。
结果表明,对于视场内所有目标点,第10通道数据和Smear通道的相关系数10(all)=0.9997,说明两者有比较理想的线性关系,拟合后残差的标准差相对于DN值中值比例为10(all)=0.896%
上述2种情况下,图像通道与Smear通道间均存在良好的线性关系。太阳光源下的漫反射板实验得到的线性相关性,要优于以积分球为光源的情况,原因在于积分球输出均匀性不及漫反射板。
以太阳为光源来确定各图像通道与Smear通道关系,结果如表1所示。
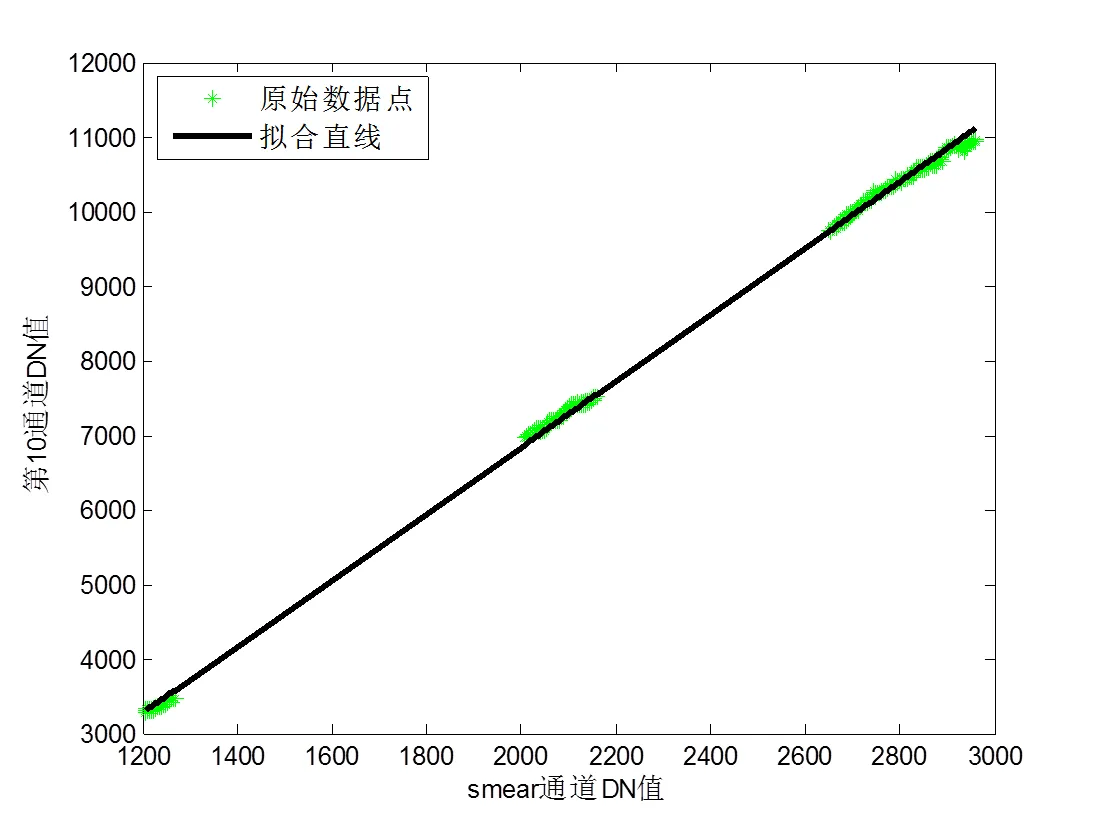
图6 漫反射板全视场数据的线性相关性
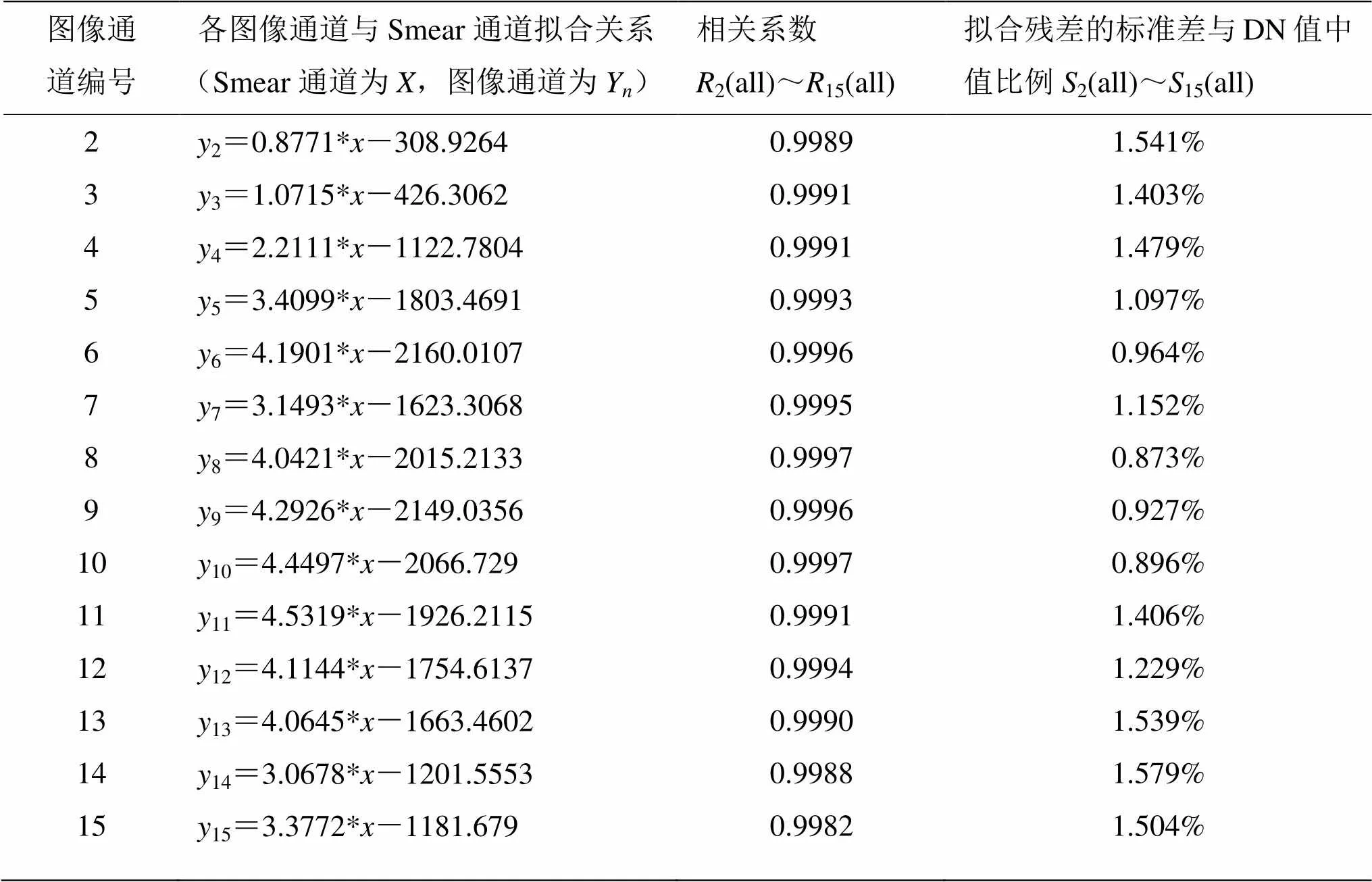
表1 利用太阳光源确定的各图像通道与smear通道的关系
表1结果说明,各图像通道和Smear通道均存在比较良好的线性关系,分别获得了各通道与Smear通道的拟合关系,可以利用它对出现饱和的图像通道数据进行恢复。
上述参数是在太阳光源下灰阶漫射板各通道均未饱和时获取,实际在轨图像饱和恢复的阈值与饱和恢复系数需要在仪器的电路参数固化之后,在天气晴朗时,对更多灰阶漫射板进行图像获取并加以处理后获得。
5 结论
本文研究的仪器的动态范围针对海洋水色目标设定,对高亮度的云目标成像时某些通道会饱和,导致云对海洋弱目标杂光校正算法无法完成。针对该问题进行分析,推导了仪器设置的Smear通道和其他图像通道间的线性关系,并通过实验验证了这种线性关系的存在,利用这种线性关系实现了对积分球饱和图像数据的恢复。分析了积分球与太阳光两种光源下的一致性以及存在差异性的原因,由此推导出该恢复算法同样可以用于在轨图像饱和恢复,为在轨杂散光校正算法提供了有效的数据源。
[1] 刘良明, 祝家东. 海洋水色遥感器发展趋势初探[J]. 遥感信息, 2011(2): 111-119.
LIQ Liangming, ZHU Jiadong. Preliminary study on trend of ocean color sensor development[J]., 2011(2): 111-119.
[2] 李四海.海洋水色遥感原理与应用: 国际海洋水色协调工作组(IOCCG)报告[P]. 北京: 海洋出版社, 2002: 11-13.
LI Sihai.[M]. Beijing: Ocean Press, 2002: 11-13.
[3] 孙从容, 张正, 张为良, 等. 利用卫星遥感进行海上透明云薄云的检测[J]. 海洋预报, 2005, 22: 87-93.
SUN Congrong,ZHANG Zheng, ZHANG Weiliang, et al.Detecting Method of Thin and Transp Arent Cloud Over Sea in Remote Sensing[J]., 2005, 22: 87-93.
[4] 傅平. CCD图像传感器拖尾的研究[J]. 压电与声光, 2004, 26(1): 72-75.
FU Ping. Research on Chancing Vertical Smearing of Frame Transfer Array CCD Image Sensor[J]., 2004, 26(1): 72-75.
[5] 崔毅. 推扫式宽视场CCD成像光谱技术研究[D]. 上海: 中国科学院大学, 2014: 41-42.
CUI Yi. Study of Large Field Push-Broom Imaging Spectrometer Using CCD Detector[D]. Shanghai: University of Chinese Academy of Sciences, 2014.41-42.
[6] 陈希孺. 概率论与数理统计[M]. 合肥: 中国科学技术大学出版社, 2009: 117-125.
CHEN Xiru.[M]. Hefei: University of Science & Technology China press, 2009: 117-125.
[7] 何全军, 曹静, 黄江, 等. 基于多光谱综合的MODIS数据云检测研究[J].国土资源遥感, 2006 (3):19-22.
HE Quanjun, Cao Jing, HUANG Jiang, et al. Cloud Detection in MODIS Data Based on Multi-Spectrum Synthesis[J]., 2006(3):19-22.
Research on Using Frame Transfer CCD SmearCorrection Channel to Restore Saturated Image Channels
ZHANG Tengfei1,2,WANG Hongbo1,2,HUANG Xiaoxian1,WEI Jun1,MA Liang1,2
(1.,,200083,;2.,100049,)
Ocean color remote sensing applications require optical remote sensing instruments with high sensitivity and high precision. The visible and near infrared imaging spectrometer studied in this paper achieved high sensitivity using push-broom scanning, and it achieved high precision measurement by using stray light calibration and correction. Unsaturated target signals in the images are needed when using stray light correction algorithm. The dynamic range of the instruments are set according to ocean color targets, so the signals of high brightness clouds would saturate, and it leads to poor performance of the stray light correction algorithm. This paper works on a push-broom visible near infrared imaging spectrometer based on frame transfer array CCD, and by analyzing the mechanism of the CCD smear correction channel of the system, we prove linear correlation between the image channels and the smear channel under different lights, then we propose a way of restoring saturated signals in image channels using smear correction channel, so it could provide useful data for the stray light correction of the satellite hyperspectral images, and it proposes a feasible way of restoring saturated images.
frame transfer array CCD,smear correction channel,stray light,saturated signal recovery
TP75
A
1001-8891(2016)01-0041-06
2015-06-16;
2016-01-06.
张腾飞(1987-),男,博士研究生,主要从事可见近红外成像光谱仪成像及图像处理技术的研究,E-mail: zhangtengfeiflame@foxmail.com。
空间科学基金项目(20130190001)。
猜你喜欢
应用光学(2022年3期)2022-07-05
小资CHIC!ELEGANCE(2021年28期)2021-08-18
上海工艺美术(2021年4期)2021-04-24
日用电器(2021年1期)2021-03-13
雨花(2020年9期)2020-09-10
科教导刊·电子版(2019年9期)2019-05-20
数学小灵通·3-4年级(2017年3期)2017-04-16
上海农业学报(2017年3期)2017-04-10
红外技术(2017年4期)2017-03-22
中国扶贫(2015年15期)2015-08-10