
名优茶并联采摘机器人的结构与工作空间设计
2016-03-25 08:21王会丽河南省工艺美术学校河南郑州450000
福建茶叶 2016年1期
关键词:结构设计
王会丽(河南省工艺美术学校,河南郑州450000)
名优茶并联采摘机器人的结构与工作空间设计
王会丽
(河南省工艺美术学校,河南郑州450000)
摘要:茶叶受季节影响很大,采摘时间必须控制在一定期限内。由于采茶具有工作任务重的特点,采茶中已经逐渐开始使用机械采摘手段。与传统的手工采茶相比,机采具有效率高的显著优势。但其采摘效果却没有人工采摘效果好。因此,茶产业要想取得长远发展,就必须重视解决茶叶采摘难题。本文对名优茶并联采摘机器人的结构与工作空间设计进行了简要分析。
关键词:名优茶采摘;并联机器人;结构设计;工作空间设计
1 前 言
名优茶经济价值极高,但采茶面临着巨大的难题。由于采茶期限较短,采摘任务十分繁重,传统的人工采摘无法满足当今的茶叶采摘要求。因此,名优茶采摘的机采得到了一定的发展。但是,机采并不像人工那样灵活,采摘效果有待提高。随着这个问题越来越突出,名优茶并联采摘机器人的设计就成为不少人关心的话题。
2 概 述
我国果蔬采摘的传统方式为人工采摘。随着经济和科技的发展,带动了农业机械化的发展。目前我国在采摘机器人研究方面已经取得了一些成绩。如,中国科学院自动化研究院设计的草莓采摘机,能够自主识别、精确定位,可以基本达到草莓采摘的要求,损伤率相对较小。相关试验研究表明,在实验室环境下,其采摘成功率最高可达90%。采茶机是一种能够显著提高茶叶采摘效率的机械设备,当前我国茶叶采摘中主要使用的是往复切割式采茶机。这种采茶机明显的不足,是无法识别新梢和老叶,成功采摘的茶叶往往完整性比较差。在并联机器人方面,我国很多专家、学者都对其进行了长时间的研究,几乎所有研究都是在实验室环境下进行的,研究成果始终停留在理论层面,在实践方面还有着明显的不足。并联机器人尚未真正与采茶技术结合,因此,如何将理论付诸实施,是我国目前亟待解决的问题。
3 名优茶并联采摘机器人结构设计分析
3.1方案分析
本文在合理利用并联机构优势,将其与采茶技术充分结合,尝试着提出了名优茶并联采摘机器人的结构设计。名优茶并联采摘机器人应用的基本要求是可以迅速、准确的定位茶叶,并进行有选择的采摘。基于上述要求,机器人必须具备一定的工作自由度。该机器人的工作原理为:在摄相机1与投影仪4共同构成新梢识别定位系统的基础上,由摄相机1将茶叶冠层图像拍下来,之后通过颜色特征区分老叶与新梢,并确定新梢的平面坐标;投影仪4与摄相机1分别进行图像的投射、摄取,并经由处理调制过的图像,获取新梢高度坐标;将高度坐标与平面坐标结合起来,就可以获取新梢的空间坐标,将其传至控制系统,就能够利用电机实现并联机构的运动控制;最后,准确定位执行器,就能够实现高效的茶叶采摘。结构方案见图1。
3.2机器人总体结构
名优茶并联采摘机器人由五部分构成:1、静平台。2、动平台。3、驱动臂。4、执行臂。5、执行器。静平台位于行走机构上,能够起到减少转动惯量的作用。动平台的主要功能在于安装执行器,因此,可以说,动平台是实现名优茶自动化采摘的重要影响因素。驱动臂与执行臂的功能主要在于传递运动,使执行器能够实现运动。执行器被四个球铰联接起来,具有平行四边形的运行特点。机器人总体结构见图2。
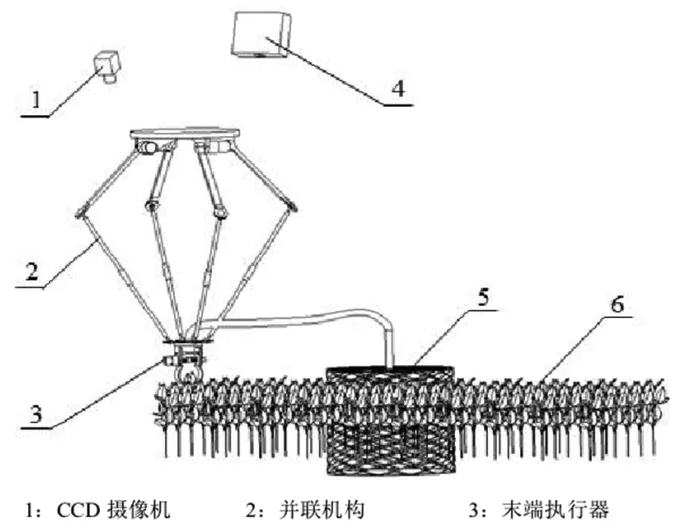
图1 名优茶并联采摘机器人结构方案
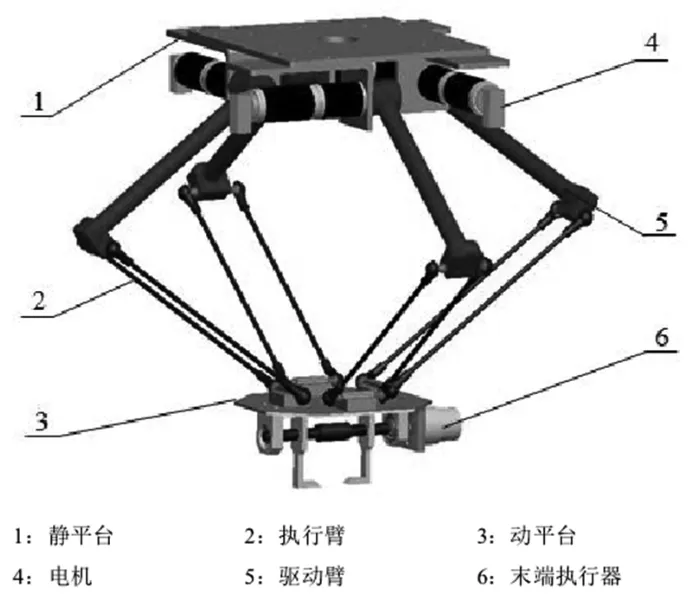
图2 名优茶并联采摘机器人总体结构
3.3并联结构设计
并联机构的优点有很多,包括刚度大、承载力强等,且不会产生累计误差。并联机构设计时,可将驱动装置设置在静平台上,同时,为了减小惯量、降低机构质量,可以将执行臂设计为轻质杆件。这样做还有利于保证执行器运动的速度、为物料的抓取以及搬运提供便利。因此,从理论上来讲,这样设计的并联机器人是能够满足采茶的基本要求的。
在设计的过程中,应确保满足这些条件:一、并联机构必须能够满足x、y、z三自由度移动要求,保障准确定位以及有选择采摘的实现。二、动平台、静平台都应确保刚度能够承载执行器而不会变形。三、机构在采摘过程中的运动空间必须足够。
并联结构由动平台利用四条单链连接到静平台上;单链包含执行臂与驱动臂,且执行臂为平行四边形机构;利用转动副将驱动臂安装在驱动器上,驱动器位于静平台上;执行臂包含2个杆件、4个球铰,且一端与驱动器连接,另一端与动平台连接。
3.4平台结构设计
静平台的功能是承载驱动装置,因此,静平台的尺寸与驱动装置密切相关。驱动装置中包含四部分:一、电机。二、驱动器。三、编码器。四、减速器。计算静平台尺寸时,应先选定驱动电机以及其他装置。结构中可以使用直流伺服电机,其具有原理简单、价格低廉等显著优势,应用范围相当广泛。面板的主要功能是承载控制系统,设计过程中必须重视保障面板的尺寸足够容纳电机座与控制系统。为了防止电机座出现变形,最好使用折弯件。
3.5末端执行器设计
茶叶采摘是末端执行器的基本功能。在实际的茶叶采摘中,执行器的运行需要并联机的驱动。基于此,本文设计的执行器必须确保满足这些条件:一、电机1带动丝杠4运动,并利用丝杠带动夹子3、夹子5的运动,实现采摘操作。二、必须设计导杆,防止出现丝杠旋转问题,实现有选择的茶叶采摘。
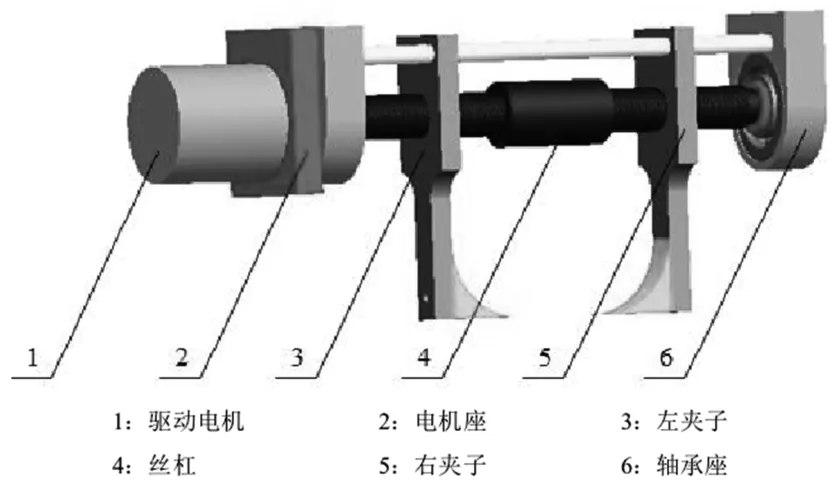
图3 执行器设计
丝杠能够在机构间传递能量以及运动形式,转换旋转运动和直线运动。本文利用丝杠传递运动,设计时必须满足的要求有:首先,其要能够适应高效采摘的基本要求,因此,丝杠应为双边反向螺纹,确保能够由电机带动夹子运动;其次,要想保证采摘茶叶的完整性,丝杠行程必须要足够,结合名优茶新梢长度与宽度,本文将丝杠单边行程设计为40mm;最后,要想保证夹持装置的运行顺利,避免出现刀片重叠过大的问题,应在丝杠间设计尺寸为35mm凸台限位。另外,在凸台限位安装的过程中,为了避免以后使用中出现零件磨损问题,应注意使用弹性垫片;在该项设计中,电机是丝杠运动与夹子张合的驱动,因此,必须为电机和滚动轴承留出安装位置、运动空间。结合上述分析,本文最终将丝杠长度设计为164mm。
4 名优茶并联采摘机器人工作空间设计
工作空间设计是名优茶并联采摘机器人设计的重要环节,设计的是否合理,关系到机器人的性能以及使用效果,因此,必须慎重对待。在设计环节中,工作空间设计必须经过科学的分析。在某种程度上来讲,机器人尺寸取决于其工作空间,所谓机器人的工作空间,一般指的是执行器可到达的点的集合,但是,空间求解相当复杂,由于篇幅有限,本文在此不作详述。当前,确定机器人工作空间的方法主要有数值法与解析法两种。机构比较简单的可用解析式,复杂的只能用数值法。本文将两种方法综合使用,对名优茶并联采摘机器人的工作空间设计进行了简要阐述。
一般来讲,影响机器人工作空间的因素主要包括:一、驱动副转角。二、机构。三、奇异位置。上述三项因素均会对其工作空间形成约束。驱动副转角需满足的条件为q1min<qi1<q1max,机构则要保证q2min<qi2<q2max、q3min<qi3<q3ma(x其中,i=1、2、3、4)。依照机构运动特性,Delta并联机构工作空间为单链可达区域。因此,并联机器人工作空间内的点应满足的条件为△i≥0,且qmin≤qi≤qma(x其中,i=1、2、3、4)。
5 结 语
为了确保茶叶的经济价值,在名优茶采摘过程中,必须尽量保障茶叶匀整。名优茶采摘具有时间紧、任务重的特点,传统的手工采摘模式很显然与新时期的采摘要求不相适应。采茶机能够在一定程度上起到提高采摘效率的作用,但是采摘效果无法保障,与实际要求相去甚远。因此,合理利用并联机构的优势,设计名优茶并联采摘机器人对于推动我国茶产业的发展具有十分积极的意义。
参考文献
[1]范宇超.基于PMAC的3自由度并联机器人的控制研究[J].黑龙江大学工程学报.2015,06(02):91-96.
[2]李博,罗振军.基于Modelica的并联机器人整机建模与仿真[J].机械设计与研究.2015,31(03):01-03.
[3]余跃庆.运动副间隙引起的并联机器人误差及其补偿[J].光学精密工程.2015,23(05):1331-1339.
作者简介:王会丽(1980-),女,河南禹州人,本科,讲师,研究方向:工业设计。
猜你喜欢
房地产导刊(2022年5期)2022-06-01
建材发展导向(2022年6期)2022-04-18
建材发展导向(2021年13期)2021-07-28
建材发展导向(2021年11期)2021-07-28
防爆电机(2020年4期)2020-12-14
中国核电(2017年1期)2017-05-17
电子制作(2016年1期)2016-11-07
专用汽车(2016年5期)2016-03-01
专用汽车(2016年5期)2016-03-01
中国房地产业(2016年2期)2016-03-01
