太阳能平移式喷灌机行走驱动系统配置与性能研究
2016-03-24 02:19朱德兰葛茂生
节水灌溉 2016年4期
陈 昕,朱德兰,,葛茂生,李 丹
(1. 西北农林科技大学水土保持研究所,陕西 杨凌 712100; 2. 西北农林科技大学中国旱区节水农业研究院,陕西 杨凌 712100)
0 引 言
喷灌是一种在我国广泛应用的高效节水灌溉技术,随着国内能源短缺危机的加剧,节能降耗成为喷灌行业的未来发展趋势[1]。平移式喷灌机因其投资小、效益高、轻巧灵便等优点,可进行大田密植作物的灌溉[2,3]。然而在日常使用中,一些偏远地区由于缺乏供电设备,存在无法为喷灌机提供驱动能源的问题。而太阳能作为一种清洁可再生能源,在农业机械中有广阔的应用前景,逐步成为研究热点[4,5]。
目前,国内外学者在太阳能农业机械领域展开了一定研究,但大多集中在太阳能拖拉机和割草机方面,关于太阳能喷灌机研究较少。南京农业大学的张超[6]等人提出太阳能园艺拖拉机的驱动系统理论设计方法并进行了验证,结果表明相同工况下有太阳能供电比无太阳能时作业时间延长1.5倍;日本福泽拖拉机公司[7]研制出了一种太阳能农用拖拉机,太阳能光照充电6 h,可供拖拉机行走9~10 h;美国路易斯安那州的室外生产公司生产出的Weed Eater太阳能割草机器人[8]配备了34块太阳能电池板,可以实现阳光下割草。关于太阳能平移式喷灌机的研究鲜有报道,本文以课题组自行研发的太阳能平移式喷灌机为例,分析不同工况下的机组所需驱动功率,并以此为机组进行电机的功率匹配与光伏系统配置。本文初步探讨了太阳能平移式喷灌机行走驱动系统设计理论,并对其进行了实例验证。
1 太阳能平移式喷灌机行走驱动系统结构设计
太阳能平移式喷灌机示意图如图1所示,其中行走驱动系统由驱动电机、RV减速器、牙嵌式电磁离合器、联轴器、太阳能板及蓄电池构成,驱动动力由电机提供,电机输入的扭矩经RV减速器、牙嵌式电磁离合器和联轴器传递到驱动车轮,为机组提供行走动力。
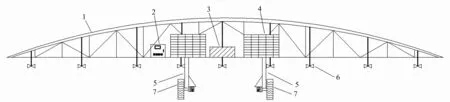
1-喷灌机桁架;2-控制箱;3-蓄电池;4-太阳能板;5-驱动系统;6-喷头;7-驱动车轮 图1 太阳能平移式喷灌机示意图Fig.1 Solar translational sprinkler schematic
2 行走驱动系统主要参数确定方法
2.1 驱动电机总功率计算
驱动电机的输入功率由喷灌机行走阻力和行走速度决定。其中,行走阻力主要包括滚动阻力、空气阻力、加速阻力以及坡度阻力[9-11]。考虑到太阳能平移式喷灌机行走速度低,且变化平缓,在确定驱动电机功率时,克服空气阻力和加速阻力所需功率忽略不计,只考虑水平路面和坡道行走时所需功率。
2.1.1水平路面行走驱动功率
根据驱动系统设计理论,计算喷灌机匀速行走时的车轮转矩时需要考虑减速机减速比及各级传动系数,最终得到电机所需理论输出扭矩。驱动电机的输出功率与输出扭矩转换计算公式为:
Pmotor=Tn/9.55
(1)
式中:P为驱动电机输出功率,W;T为驱动电机输出扭矩,N·m;n为驱动电机转速,r/min。
由于电机输入扭矩通过减速器传递到驱动轮,而且减速器具有降低转速,增加扭矩的作用,因此,电机扭矩T与驱动轮扭矩M表达关系式[17]为:
(2)
式中:io为主减速器传动比;ig为变速器传动比;ηt为驱动机构工作效率。
喷灌机匀速行走时,车轮驱动力等于车轮滚动阻力。因此,车轮驱动力计算公式为:
Ft=μ·N=μmg
(3)
式中:μ为附着系数;m为喷灌机组质量,kg;g为重力加速度,取9.8 m/s2。
驱动轮扭矩计算公式:
M=Ft·r=μmgr
(4)
式中:r为车轮半径,m。
驱动电机转速与喷灌机行走速度换算的计算公式为[17]:
(5)
式中:v为喷灌机行走速度,m/h;r为车轮半径,m;n为电机转速,r/min。
将公式(2)~(5)代入式(1)中,得到驱动电机所需的输出功率:
(6)
式中:根据驱动系统设计可知,太阳能平移式喷灌机行走驱动系统工作效率包括:RV减速器、牙嵌式电磁离合器和联轴器的传动效率以及驱动电机的工作效率,系统工作总效率为:
ηt=ηrbηclηcηm
(7)
式中:ηrb为减速器传动效率,%;ηcl为离合器传动效率,%;ηc为联轴器传动效率,%;ηm为驱动电机工作效率,%。
根据《机械设计手册》[13]中常用机械效率值,取RV减速器传动效率ηrb=90%,牙嵌式电磁离合器传动效率ηcl=99%,联轴器传动效率ηc=99%,驱动电机工作效率ηm=95%,代入式(6)计算可知驱动机构的总工作效率为83.8%。
2.1.2坡道行走驱动功率
喷灌机爬坡过程中所受阻力主要包括驱动阻力Ff和上坡阻力Fi,具体可按下式计算[12]:
∑F=Ff+Fi=μmgcosα+mgsinα
(8)
式中:Ff为驱动阻力单位;Fi为上坡阻力单位;μ为附着系数;m为机组质量,kg;g为重力加速度取9.8 m/s2;α为爬坡角,(°)。
根据式(1)~(5)可知,坡道行走时喷灌机行走功率计算公式为:
(9)
2.2 蓄电池参数确定
为保证在阴天或雾霾天气下喷灌机的正常运行,需要配备一定的蓄电池进行电能的储备。蓄电池容量可由下式计算[14]:
(10)
式中:C为蓄电池容量,kWh;D为最长无日照期间用电时数,h;Fa为蓄电池放电效率的修正系数,通常取1.05;L1为蓄电池的维修保养率,通常取0.8;U为蓄电池的放电深度,通常取0.5~0.8;Ka表示配线损耗,一般取0.9~0.95。
对蓄电池的容量进行单位换算,转化成安时,蓄电池的设计应保有余量,因此蓄电池的块数为:
(11)
式中:N1为蓄电池块数;Ct为蓄电池的设计容量,Ah;cs为单块蓄电池的容量,Ah;
2.3 光伏电池功率确定
光伏电池功率根据光伏电池能量确定。所需光伏电池能量与电池充电效率与控制器效率有关,即[15]:
(12)
式中:Et为光伏电池能量,W·h;VB为蓄电池组额定电压,V;ηcc为充电控制器效率,一般取0.95;ηch为电池充电效率,一般取0.8~0.85。
对于某地区日均峰值日照时数的计算,用公式可以表示为:
Tmax=7.599×10-5F
(13)
式中:Tmax为平均日峰值日照时数,h;F为该地区的年均辐射量,J/cm2。
确定光伏电池功率应考虑当地全天光照时间,所需光伏电池功率为:
(14)
式中:Pt为光伏电池功率,W;kd为功率降低因子,为太阳能面板因老化或污尘遮盖引起的修正值,取0.9~0.95;kaP为光伏电池老化因子,使用年数增加导致的光伏电池效率降低,一般取0.95~0.98;kw为光伏电池温度影响因子,光伏电池的输出功率随工作温度的上升而下降,晶体硅电池温度影响因子,取0.95。
在求得太阳能电池板的设计功率后,对太阳能电池板进行比选,以电池板的容量应保有余量为原则,太阳能电池板的数目为:
(15)
式中:N2为太阳能板块数;Ps为单块太阳能电池板的输出功率,kW。
3 附着系数试验
太阳能平移式喷灌机在不同路面条件下的行走驱动电机输出功率存在差异,由式(6)、(9)可知,喷灌机行走功率变化取决于喷灌机自身重量、行走速度、爬坡角度、驱动系统工作效率和路面附着系数。其中路面附着系数对喷灌机行走驱动力影响较大,附着系数由路面土壤条件及路面干湿条件所决定。《农业机械设计手册》[13]给出了农业机械田间行走常用附着系数,如表1所示。但一般农业机械田间行走速度远大于平移式喷灌机,手册推荐的附着系数是否仍适用于喷灌机驱动功率的计算有待验证。

表1 常用附着系数Tab.1 Common adhesion coefficient
3.1 试验设备及测试方法
太阳能平移式喷灌机滚动阻力系数测定试验装置如图2所示,试验在陕西杨凌中国旱区节水农业研究院小麦实验田中进行。实验田土壤为干燥黏土,土壤容重为1.42 g/m3,田中预留间距为2 m的两个机行道,机行道宽1 m。试验所用喷灌机为课题组自行研发的太阳能平移式喷灌机,喷灌机采用四轮驱动,每个驱动电机上安装功率表。
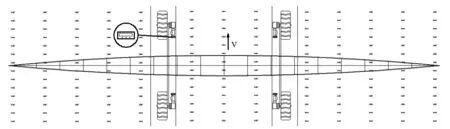
图2 太阳能平移式喷灌机行走功率测定试验装置示意图(图中放大部分为功率表安装位置)Fig.2 Schematic diagram of the test solar translational sprinkler running power measurement
试验时启动喷灌机至行走状态,调节电机转速,将喷灌机行走速度设定为150 m/h,待喷灌机运行稳定时从功率表中依次读取每个电机输入功率值,以此计算得到电机总输入功率。以同样的方法分别测定行走速度为200、250、300、350、400和450 m/h时的驱动电机总输出功率。
3.2 计算结果与分析
对公式(1)变形可得到附着系数与驱动功率关系式,即:
(16)
根据式(16)计算不同行走速度下喷灌机行走时的附着系数值,如表2所示得到干燥黏土条件下喷灌机行走速度与附着系数关系。

表2 干燥黏土条件下喷灌机行走速度与附着系数关系Tab.2 Solar translational sprinkler with speed and adhesion coefficient
从表2中可以看出,随着行走速度的不断提高,驱动电机总输出功率增大,而附着系数逐渐减小,行走速度对附着系数产生显著影响,近似成线性关系,附着系数变化范围在0.415~0.483之间。其变化范围与表1中给出的附着系数取值范围0.40~0.50相符,说明表1中给出的常用附着系数取值适用于太阳能平移式喷灌机动力需求的计算。
4 电机功率和光伏系统配置及性能评价
4.1 不同工况下电机功率和光伏系统匹配
以自行研发的太阳能平移式喷灌机为例对驱动电机与光伏系统的进行选型与匹配设计。喷灌机主要结构参数如表3所示。
表3喷灌机主要结构参数
Tab.3ThemainparametersofSprinkler

名称平移式喷灌机重量/kg桁架长度/m车轮半径/m数值667.60024.0000.325
选取沙质荒地与黏土荒地两种喷灌机常见工作路面条件,每种路面条件包括不同干湿条件,将不同行走速度带入式(16)中得到该行走速度下的附着系数;取喷灌机行走速度最大设计值为450 m/h;喷灌机作业环境较复杂,为避免其作业时出现驱动轮沉陷及打滑现象,应在田中预留两条压实路面机行道,而田间路面坡度一般不大于12°,故选择12°为最大爬坡角。将表3中参数以及附着系数分别带入式(6)、(9)中可得到太阳能平移式喷灌机沙质荒地和黏土荒地两种路面条件下的最大行走功率和最大爬坡功率。经计算,沙质荒地最大行走功率为511.6 W,黏土荒地最大行走功率为562.2 W。考虑到喷灌机实际运行时可能遇到的不利因素,在电机功率匹配时需乘以安全系数,安全系数取1.5,则选择配套电机为额定电压为24 V输出功率为200 W的直流有刷电机作为驱动电机。
为应对阴天或雾霾天气太阳能电池板发电不足以及机组夜间运行时太阳能电池板无法发电的情况,需要对机组配备一定容量的蓄电池。取最长无日照时数为20 h,蓄电池放电效率修正系数取1.05,蓄电池维修保养率取0.8,蓄电池放电深度取0.7,配线损耗率取0.9,则由式(12)~(15)计算得到沙质荒地和黏土荒地路面条件下配套蓄电池的容量分别为1.808和2.033 kWh,对其单位换算后可知宜选用2块12 V 90 Ah的蓄电池串联后为驱动电机供电。
本文以喷灌机行走速度为150 m/h为例,取最大日工作时间为20 h,参考全国不同城市的日均辐射量,确定日峰值日照时数为4 h。其中ηcc、ηch、kd、KaP和Kw分别取0.95、0.85、0.9、0.95和0.95。将上述参数值带入式(8)中,可得到沙质荒地和黏土荒地路面条件下太阳能板全天累计发电量分别为0.397和0.466 kW。据此选择2块单晶100 W太阳能电池板。
综上所诉,得到太阳能平移式喷灌机驱动电机选型及光伏系统配置表,如表4所示。

表4 太阳能平移式喷灌机驱动电机选型及光伏系统配置Tab.4 Solar translational sprinkler drive motor selection and photovoltaic system configuration
4.2 平移式喷灌机行走性能评价
4.2.1性能评价方法
对于太阳能平移式喷灌机作业能力的评价,本文采用一日累计作业时间作为评价指标,其中全天累计作业时间指蓄电池充满后,平移式喷灌机一天内工作时间的总和。由于喷灌机作业时消耗的能量等于光伏系统为其提供的总能量,其中光伏系统提供的总能量为太阳能板全天发出总能量和蓄电池额定输出能量两部分之和。则太阳能拖拉机在最大驱动功率下行走时全天累计作业时间为:
(17)
式中:Tc为全天累计作业时间,h;WS为太阳能板全天发出总能量,W·h ;Pmax为喷灌机最大驱动功率。
4.2.2太阳能板全天累计发电量分析
由于陕西关中地区土壤类型多为黏土而宁夏中卫地区土壤类型属于沙土,以地处陕西西安市和宁夏中卫市为例,由美国国家航空航天局(NASA)大气科学数据库可以查询该辐射量,通过数据库查得西安市和中卫市年均辐射量分别为为3.93和4.59 kWh/(m2·d),对其进行单位换算并代入式(8)可得,西安市的日峰值日照时数为3.92 h,中卫市日峰值日照时数为4.58 h,将上述参数值带入式(12)~(15)中,可得到西安市和中卫市太阳能板全天发电量分别为0.514和0.597 kW。
4.2.3全天累计作业时间分析
以所研制的太阳能平移式喷灌机为例,结合光伏系统全天发出总电量,根据式(17)分别计算晴天和阴天条件下太阳能喷灌机在水平路面和坡道工作行走两种工况下的全天累计作业时间。
表5所示为平移式喷灌机在陕西关中地区及宁夏中卫地区有无太阳能时一日累计作业时间比较,由表可知,同一地区相同工况下,喷灌机一日累计作业时间随行走速度的增大而减小,相同速度下水平路面行走一日累计作业时间要大于坡道行走。而在同一地区,有光照时一日累计作业时间要明显长于无光照时,约为无光照时的1.5倍。可以看出,使用光伏系统可以延长喷灌机一日累计作业时间,能够满足额定作业时间的需求。
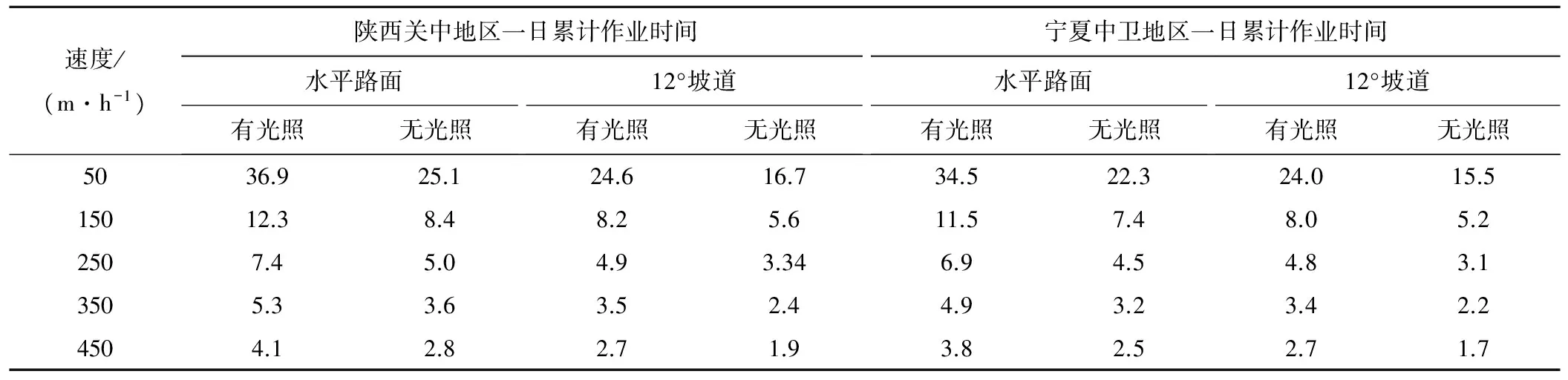
表5 太阳能平移式喷灌机驱动系统性能评价Tab.5 Solar translational sprinkler translation system performance evaluation
5 结 语
(1)本研究推导了太阳能喷灌机行走工作时驱动电机所需能耗,以及根据驱动电机所需能耗提出光伏系统中太阳能板和蓄电池的配置方案。结果表明,光伏电池为喷灌机提供能量,增加了喷灌机的作业时间,可以满足喷灌机日常行走工作需要,证明了光伏电池作为平移式喷灌机能源是可行的。
(2)平移式喷灌机行走工作时驱动电机所需能耗受到路面类型的影响,不同路面类型其附着系数取值不同。其中实测陕西关中干燥黏土荒地附着系数值为0.415~0.482,符合农业机械设计手册中给出的常用附着系数值,则可根据已知的常用附着系数值确定不同路面平移式喷灌机行走驱动电机输出功率。
(3)以所研制的太阳能平移式喷灌机为例,喷灌机随着作业速度的不断提高,随着行走坡度角的增大,全天累计作业时间不短缩短;喷灌机黏土荒地行走作业全天累计作业时间小于沙土荒地行走作业时间。相同工况下,晴天全天累计作业时间为阴天的1.5倍。
[1] 兰才有, 仪修堂, 薛桂宁,等. 我国喷灌设备的研发现状及发展方向[J]. 排灌机械工程学报, 2005,23(1):1-6.
[2] 涂 琴, 李 红, 王新坤,等. 不同指标轻小型喷灌机组配置优化[J]. 农业工程学报, 2013,(22):83-89.
[3] 潘中永, 刘建瑞, 施卫东,等. 轻小型移动式喷灌机组现状及其与国外的差距[J]. 排灌机械工程学报, 2003,21(1):25-28.
[4] 刘 强, 黎妹红, 朱明峰,等. 太阳能在智能生态农业中的应用[J]. 北华大学学报:自然科学版, 2012,13(3):344-347.
[5] 李加念, 洪添胜, 倪慧娜. 基于太阳能的微灌系统恒压供水自动控制装置研制[J]. 农业工程学报, 2013,(12):86-93.
[6] 张 超, 朱思洪, 王军洋,等. 太阳能园艺拖拉机驱动系统匹配设计与性能分析[J]. 农业工程学报, 2015,(11).
[7] 欣 然. 日研制出太阳能农用拖拉机[J]. 山东农机化, 2006,(2):16-16.
[8] 太阳能割草机器人[J]. 机器人技术与应用, 1995,(3).
[9] 赵云峰, 万杰, 朱自萍,等. 太阳能电池在汽车上的应用分析[J]. 农业装备与车辆工程, 2011, (5):39-42.
[10] 刘雪梅, 黄 伟, 周云山. 插电式混合动力汽车动力系统参数研究[J]. 计算机仿真, 2009, 26(10):302-306.
[11] 李广兆. 插电式混合动力电驱动系统的动力匹配算法[C]// 2011中国汽车工程学会年会论文集,2011.
[12] 刘泽旭, 王立海, 孙天用,等. 轮式与三角履带式集材机的爬坡性能比较[J]. 林业科技开发, 2014, (6).
[13] 中国农业机械化科学研究院编. 农业机械设计手册[M]. 北京:机械工业出版社, 1974.
[14] 李安定. 太阳能光伏发电系统工程[M]. 北京:北京工业大学出版社, 2001.
[15] Ahmed S, Zenan A H, Rahman M. A two-seater light-weight solar powered clean car: preliminary design and economic analysis[C]∥ Developments in Renewable Energy Technology (ICDRET), 2014 3rd International Conference on the. IEEE, 2014:1-7.
[16] 姬芬竹, 高 峰. 电动汽车驱动电机和传动系统的参数匹配[J]. 华南理工大学学报:自然科学版, 2006,34(4):33-37.
猜你喜欢
科学大众(2022年23期)2023-01-30
少年漫画(艺术创想)(2020年6期)2020-10-23
少年漫画(艺术创想)(2018年5期)2018-09-11
小哥白尼(趣味科学)(2018年4期)2018-06-21
好孩子画报(2018年1期)2018-04-14
汽车维修与保养(2017年1期)2017-05-15
汽车维修与保养(2016年1期)2016-09-07
汽车维修与保养(2016年12期)2016-03-14
汽车维修与保养(2016年11期)2016-02-21
少儿科学周刊·儿童版(2015年7期)2015-11-24