
襟翼不对称运动和襟翼倾斜的保护逻辑研究
2016-03-24 08:08韩赛化东胜
航空工程进展 2016年1期
关键词:监控
韩赛,化东胜
(1.中航飞机研发中心 飞控液压设计研究所,西安 710089)
(2.中航飞机研发中心 动力燃油系统研究所,西安 710089)
襟翼不对称运动和襟翼倾斜的保护逻辑研究
韩赛1,化东胜2
(1.中航飞机研发中心 飞控液压设计研究所,西安710089)
(2.中航飞机研发中心 动力燃油系统研究所,西安710089)
摘要:实现高升力系统的故障保护对提高电传飞机安全性具有重要的意义。本文描述了高升力系统后缘襟翼的架构;针对不对称故障和倾斜故障的监控和和保护方式问题,分析了上述两类故障的监控和保护措施及其工作逻辑,在确定工作逻辑的阈值参数时综合考虑了检测和确认故障、襟翼动力驱动装置的制动过程以及系统机械误等因素;建立了故障保护逻辑的Simulink模型,并对不同的失效情况进行了仿真分析,仿真结果表明本文设计的故障保护措施能够很好地监控系统并防止故障蔓延,研究结果对民机高升力系统设计具有一定的借鉴意义。
关键词:高升力系统;不对称故障;倾斜故障;监控;故障保护逻辑
0引言
高升力系统是大型民机及支线民机的关键分系统之一,通常由前缘缝翼、后缘襟翼、控制装置及驱动装置组成,通过后退偏转后缘襟翼来改变机翼弯度和面积,以增加飞机起飞、进近和着陆时的升力和阻力,改变飞机的升阻比特性,从而缩短飞机起飞和滑跑距离。
国外大型民机A320、A340等其高升力系统基本都是由前缘缝翼和后缘襟翼组成,通常单侧机翼由10块前缘缝翼和4 块后缘襟翼组成[1],中小型民机ERJ190高升力系统的后缘襟翼包括2个内襟翼和6个外襟翼,DASH8-Q400飞机和ATR-72飞机均包含2个内襟翼和2个外襟翼。
鉴于前缘缝翼的控制方式及作动方式与后缘襟翼基本相似,本文只对后缘襟翼进行研究。
随着技术的发展,民机研制规章制度及标准逐渐成熟,对民机的安全性要求也在不断提高,因此高升力系统的失效形式备受关注。经分析后缘襟翼的一般失效形式包括:①襟翼不对称运动,即飞机左右侧的襟翼运动不一致;②襟翼倾斜,即单侧襟翼运动不一致,舵面发生扭转;③襟翼无指令运动,即襟翼运动不到指定位置、超过指定位置或没有响应指令;④襟翼超速,即襟翼运动超过襟翼标牌速度,对飞机结构产生破坏;⑤襟翼不一致监测,襟翼运动的位置和襟翼操纵手柄输入的位置不一致或运动过快、过慢等[2]。这些失效形式的等级可参考标准SAE ARP4761[3]。
国内新研的民机ARJ21和C919以及国外民机A320、A380、ERJ190等的高升力系统均具有襟翼不对称运动和襟翼倾斜保护功能,不同的飞机采用的监测和保护措施也不尽相同。
本文首先介绍高升力系统架构,然后分析襟翼不对称运动和襟翼倾斜的监控与故障定位,并阐述襟翼不对称运动和襟翼倾斜故障保护逻辑,最后对二者进行仿真,以期为民机高升力系统的设计提供参考。
1高升力系统架构
通常,高升力后缘襟翼系统由控制部分和作动部分构成。其中,控制部分由襟翼操纵手柄(FCL)、襟翼电子控制装置(FECU)、襟翼马达控制模块(FMCM)、襟翼动力驱动装置(FPDU)、襟翼位置传感器(FPSU)和襟翼倾斜传感器(FSSU)构成,作动部分由扭力管、万向节、角齿轮箱和作动器等构成[4]。
假设本文设计的后缘襟翼包括2个内襟翼和2个外襟翼,在正常工作模式下,飞行员通过FCL下达指令;在应急工作模式下,飞行员通过襟翼超控开关(FOS)下达指令;FCL或FOS的指令通过FCL中的转换装置将手柄的机械信号转换为电信号给FECU,FECU利用航电系统发送给高升力系统的空速和轮载信号与当前的襟翼位置信号,经解算后将FCL指令发送给FMCM,FMCM经解算后发送马达控制指令给FPDU中的马达,两个马达通过齿轮组构成的行星减速器实现大扭矩、低转速的输出扭矩,经传花键、扭力管、万向节组成的传动轴后将扭矩输入到作动器,最终通过摇臂实现襟翼的收放运动。高升力系统架构如图1所示。

图1 高升力系统架构
FECU除了应该实现襟翼的收放控制功能以外,还应该监测系统控制功能和工作状态,并保护飞机在高升力系统出现故障后不出现灾难级的失效事件,这就需要高升力系统增加故障保护功能,以阻止故障蔓延,进而实现保护飞机结构的目的。
2襟翼不对称运动和襟翼倾斜的监控与故障定位
不同的机型具有不完全相同的监测手段和故障保护措施,民机为了取得适航许可证,都遵照FAR25、ARP4761、ARP4754等规章进行高升力系统的设计和分析[5]。
(1) 襟翼不对称运动
在襟翼运动过程中,FPSU将襟翼的实时运动位置反馈给FECU,当左、右侧襟翼的不对称达到襟翼最大不对称度时,FECU发出停止运动的指令信号给FMCM,FMCM通过发出速度指令信号指令给FPDU的刹车装置使电机减速,最终使电机停止运动,将襟翼锁定在当前襟翼位置,系统从正常工作模式转换到无法工作模式;同时FECU向发动机指示和机组告警系统(EICAS)发送高升力系统状态信息(Non-Operating Mode)和告警信息(琥珀色的“Flap asymmetry”)并向主飞控计算机(FCC)发送高升力系统状态信息(Non-Operating Mode)。
(2) 襟翼倾斜
襟翼倾斜的监控和探测是通过检测襟翼的倾斜来检测作动机构的故障并锁止系统以防止更严重的故障发生[6],民机使用的倾斜传感器分为拉线式的线位移传感器(LVDT)和角位移传感器(RVDT);FECU通过比较同一舵面上的两个倾斜传感器的值来判断襟翼是否发生倾斜。如果发生襟翼倾斜,FECU对该故障的处理方式与襟翼不对称运动类似,最终将襟翼锁定在当前襟翼位置并转换到无法工作模式;同时向发动机指示和机组告警系统(EICAS)发送高升力系统状态信息(Non-Operating Mode)和告警信息(琥珀色的“Flap skew”)以通知飞行员高升力系统被保护,并向主飞控计算机(FCC)发送高升力系统状态信息(Non-Operating Mode)。
襟翼不对称运动和襟翼倾斜的失效监测及判断依据如表1所示。

表1 高升力系统失效监测及判定依据
3襟翼不对称运动和襟翼倾斜故障保护逻辑
襟翼不对称运动和襟翼倾斜故障的保护逻辑在FECU中实现,整个FECU软件分为硬件模块支持层、操作系统核心层以及控制律应用层三部分[7]。故障保护逻辑在控制律应用层实现。
3.1不对称运动故障保护逻辑
(1) 襟翼不对称运动逻辑判断
当FPSU有效,FECU将左、右FPSU的信号经放大器处理后折算为襟翼角度,然后判断是否满足表1中襟翼不对称运动的判定依据,如果满足,则触发不对称保护逻辑;系统开始检查和确认故障并发出不对称的信号。如果任意FPSU无效,高升力系统应丧失襟翼不对称运动监控和保护的能力。
(2) 襟翼不对称运动故障定位
当FSSU有效,首先判断左、右侧内襟翼内侧倾斜传感器(1#FSSU)信号的差值是否超过襟翼最大不对称阈值,超过则说明FPDU任一输出轴的扭力管发生断裂,导致襟翼左右不对称;否则进行第二步判断,判断左、右侧外襟翼的内侧3#FSSU信号的差值是否超过襟翼最大不对称阈值,如果超过说明左侧或右侧的外襟翼发生不对称;为了区分左侧或右侧,需要分别判断左、右侧1#和3#FSSU信号差值,如果左侧或右侧的差值超过襟翼最大不对称阈值,则说明左侧外襟翼发生不对称;右侧同理。当出现告警信息时,要充分利用中央维护系统(CMS)的下载信息,帮助排除故障[8]。
襟翼不对称运动保护逻辑的流程如图2所示。其中襟翼不对称运动判断逻辑的Simulink模型如图3所示,襟翼不对称运动故障定位的Simulink模型如图4所示。

图2 襟翼不对称运动保护逻辑

图3 襟翼不对称运动判断逻辑的Simulink模型

图4 襟翼不对称运动故障定位逻辑的Simulink模型
3.2襟翼倾斜故障保护逻辑
(1) 襟翼倾斜逻辑判断
当FSSU有效,FECU将FSSU的信号经放大器处理后折算为襟翼角度值,然后判断是否满足表1中襟翼舵面倾斜的判定依据,如果满足则说明襟翼发生倾斜。
(2) 襟翼倾斜故障定位
只需确定是哪个襟翼的两个FSSU的差值超过襟翼最大倾斜阈值即可。襟翼倾斜保护逻辑的流程图如图5所示,其中襟翼倾斜保护逻辑判断及故障定位的Simulink模型如图6所示。

图5 襟翼倾斜保护逻辑
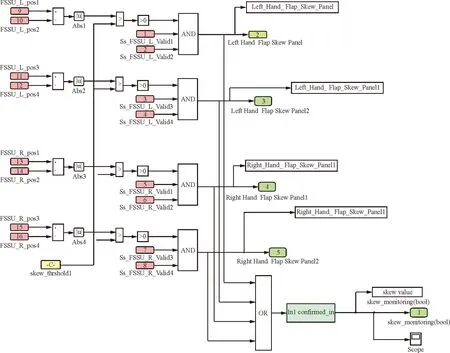
图6 襟翼倾斜保护逻辑判断及故障定位的Simulink模型
3.3故障保护逻辑中阈值的确定
(1) 影响故障保护逻辑中阈值的因素
确定襟翼不对称运动和襟翼倾斜故障保护逻辑的阈值时应考虑以下因素:
①襟翼舵面允许的最大不对称运动或襟翼倾斜角度;
②FPSU和FSSU的传感器误差范围;
③FECU检测、确定失效发生所需的时间内襟翼转动的角度;
④FPDU接通刹车装置所需的时间内襟翼转动的角度;
⑤机械误差(包括FPDU输出端、扭力管、轴承支座、滚珠丝杠作动器等的游隙以及刚度变形引起襟翼偏差角度);
⑥刹车装置接通后到FPDU停止转动时襟翼运动角度。
(2) 故障保护逻辑中参数的确定
参考ERJ190、DASH8-Q400等飞机的数据,本文选用的参数为
①襟翼最大的不对称和倾斜量为5°;
②襟翼位置传感器和襟翼倾斜传感器的误差为±0.5°;
③FECU的采样周期为20 ms,检测、确定失效发生需要3个采样周期,因此所需时间为60 ms;
某型机的襟翼从0°(巡航构型)变化到38°(着陆构型)时,历时20 s且FPDU的输出轴的总转数为133.32 r,因此FPD的平均转速为

在检测、确定失效期间襟翼以最大速度转动,FPDU在加速或减速过程中的位置、速度和加速度的变化趋势[9]如图7所示。其中,D为从失效发生开始PDU输出轴转动的位移;T为距离不对称失效时间发生的时间;Vmax为FPDU输出轴的最大转速;T1为检测和确认失效、接通PDU刹车装置的时间;T2-T1为FPDU刹车所需时间;a为FPDU减速度。

图7 PDU的制动过程
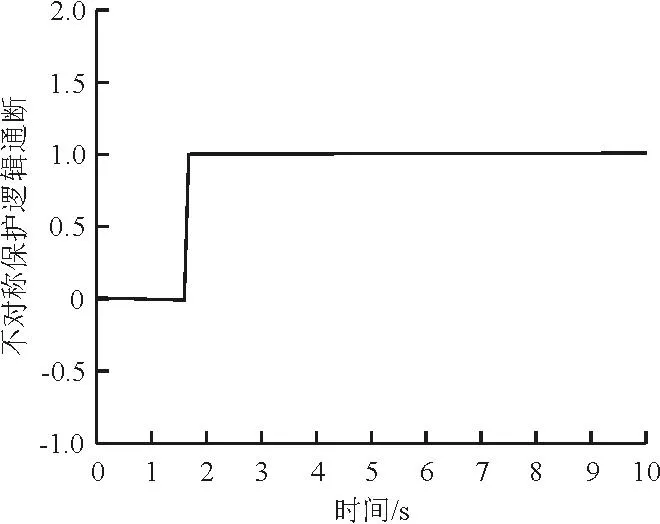
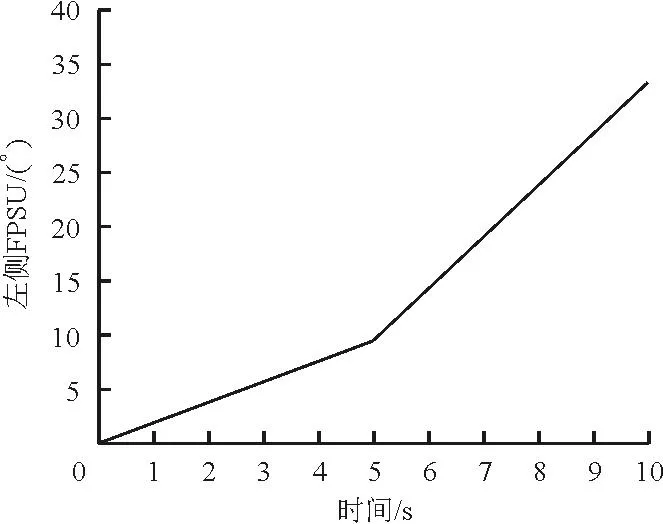
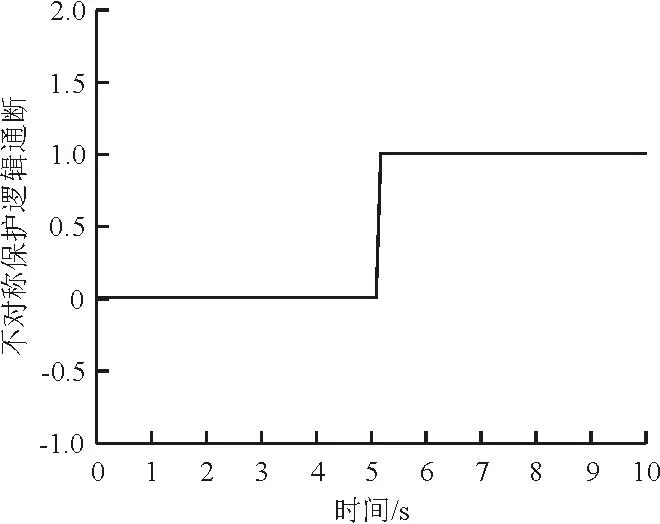
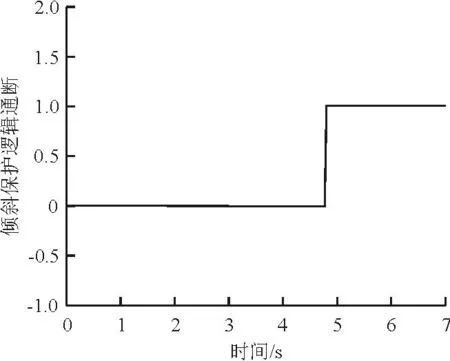
当T 当T≥T1时,FPDU完成制动的时间T2=T1+Vmax/a,输出轴的速度V2(T)=-a×(T-T1)+Vmax且V2(T2)=0,根据运动速度和时间可知T2时刻襟翼停止运动时发生的位移D2(T2)=Vmax×T1+0.5×Vmax×(T2-T1)。 某型机选用的FPDU在1 s可达到额定转速450 rpm,可得加速度为 a=(450 rpm×1 min/60 s)/1 s 假定FPDU需要时间Δt,则FPDU的最大工作转速Vmax=a×Δt。FPDU的加速、匀速和减速过程的行程等于FPDU的平均转速乘以工作时间,即 0.5×Vmax×Δt+Vmax×(20-Δt-Δt)+ 0.5×Vmax×Δt=Vmax×20 (1) 求解可得FPDU的加速时间Δt=0.932 s,最大工作转速Vmax=419.5 rpm。 进而可得检测、确定失效过程中襟翼运动的角度为 (60 ms×1 s/1 000 ms)×(419.5 rpm× 1 min/60 s)/133.32 rad×38°=0.119 6° ④FPDU接通刹车装置所需的时间为20 ms,该期间襟翼运动的角度为 (20 ms×1 s/1 000 ms)×(419.5 rpm× 1 min/60 s)/133.32 rad×38°=0.039 9° ⑤机械误差:某型机的FPDU输出轴的误差为2 rad,襟翼在38°时FPDU的总的圈数为133.32 rad,则FPDU输出端的误差为2 rad/133.32 rad×38°=0.57° 滚珠丝杠作动器、扭力管、轴承支座等的游隙、刚度变形引起襟缝翼偏角的误差范围为0.2°,因此总的机械误差为0.2°+0.57°=0.77°; ⑥假定刹车装置的制动时间与加速时间相同,则接通后到FPDU停止转动时襟翼运动角度为 0.5×419.5 rpm×1 min/60 s× 0.932 s/133.32 rad×38°=0.929° 确定襟翼不对称运动和襟翼倾斜的工作逻辑中的阈值时,应在襟翼舵面允许的最大不对称运动或襟翼倾斜角度的基础上,除去检测及确定失效过程中襟翼运动的角度、FPDU接通刹车装置襟翼运动的角度、接通刹车装置后到FPDU停止转动时襟翼运动角度和总的机械误差;由于襟翼电子控制装置得到的数据来自两个不同的传感器,会使襟翼电子控制装置在同一襟翼位置时得到的数据存在±0.5°的误差,因此扩大了工作逻辑中的阈值的范围。最终可得工作逻辑中的阈值应为5°-0.119 6°-0.039 9°-0.929°-0.77°+0.5°×2=4.142°。 3.4故障保护逻辑仿真结果 根据图2~图3建立的襟翼不对称运动和襟翼倾斜的监控和故障保护逻辑的Simulink仿真模型,下文给出三类典型的不同故障类型[10]的仿真结果。 ①左侧FPSU失效:某时刻左侧的FPSU有效性从真值变为假值,如图8所示,襟翼不对称运动保护逻辑的仿真结果如图9所示。 图8 左侧FPSU故障 图9 左侧FPSU失效触发襟翼不对称运动保护 ②左侧第一个扭力管断裂:该故障使左侧传动线系随动,使左侧FPSU变化率增大,触发不对称逻辑,经检查定位为左右不对称,仿真结果如图10~图11所示。 图10 左侧FPSU变化率 图11 左侧FPSU变化率过大触发不对称保护 ③右侧4#作动器卡阻:该故障4#FSSU输出角度比其他FSSU小,经右侧3#倾斜传感器和4#倾斜传感器值的比较,故障定位为右外襟翼倾斜,仿真结果如图12~图13所示。 图12 右侧4#FSSU故障 图13 右侧4#FSSU故障触发襟翼倾斜保护 从图12~图13可以看出:本文建立的Simulink仿真模型可以对不同类型的故障进行监控和定位,进而实现襟翼不对称运动和襟翼倾斜故障的保护。 4结论 本文描述了典型的民机襟翼系统架构及失效形式,针对襟翼不对称运动和襟翼倾斜故障两种失效形式,提出了故障的监控和保护措施,着重分析了故障保护逻辑中阈值的确定方法,建立了故障保护逻辑Simulink模型并仿真了几种典型的失效情况,仿真结果表明本文设计的故障保护措施能成功地监控并保护系统。 本文采用Simulink模型建立了不对称和倾斜保护的工作逻辑并实现了故障定位,不足之处是尚未考虑FMCM对电机加、减速度的影响和高升力系统的柔性特征。 目前,国内外民机高升力系统的设计难点在于控制系统、驱动装置、监控和保护系统的设计以及系统集成,本文设计的襟翼不对称运动和襟翼倾斜的监控和故障保护措施是高升力系统监控和保护分系统的一部分,对高升力系统的设计具有一定的借鉴作用。 参考文献 [1] 宋翔贵. 电传飞行控制系统[M]. 北京: 国防工业出版社, 2003. Song Xianggui. Fly-by-wire flight control system[M]. Beijing: National Defense Industry Press, 2003.(in Chinese) [2] 徐向荣, 孙军帅. 民用飞机高升力系统浅析[J]. 中国制造业信息化, 2011, 40(19): 61-63. Xu Xiangrong, Sun Junshuai. Summary on the elevating system of civil aeroplane[J]. Manufacture Information Engineering of China, 2011, 40(19): 61-63.(in Chinese) [3] United States Department of Defense. MIL-DTL-9490E Flight control systems-design, installation and test of piloted aircraft, general specification for[S]. USA: United States Department of Defense, 2008. [4] 程科. 飞机操纵系统状态监测与故障预测方法研究[D]. 南京: 南京航空航天大学, 2015. Cheng Ke. Aircraft control system condition monitoring and fault forecast method research[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2015.(in Chinese) [5] Nau C. Torque Limiter: USA, 3596740[P]. 1971-08-03. [6] 马军辉, 徐向荣. 民用飞机高升力系统翼面倾斜探测方案分析[J]. 机械设计与制造工程, 2013, 42(7): 52-54. Ma Junhui, Xu Xiangrong. The project analysis on the airfoil tilt detection for civil aircraft with higt lift force[J]. Machine Design and Manufacturing Engineering, 2013, 42(7): 52-54.(in Chinese) [7] 梁森, 何嘉航. 某型飞机高升力控制系统软件设计[J]. 航空科学技术, 2015(25): 31-34. Liang Sen, He Jiahang. Design of a software for aircraft high-lift control system[J]. Aeronautical Science & Technology, 2015(25): 31-34.(in Chinese) [8] 孟巍. EMB145襟翼系统的故障分析[J]. 航空维修与工程, 2007(1): 51-53. Meng Wei. Brief talks on the flap system of EMB145 regional jet airplanes[J]. Aviation Maintenance & Engineering, 2007(1): 51-53.(in Chinese) [9] 贾士伟, 李开慧. 电机与控制[M]. 北京: 国防工业出版社, 2011. Jia Shiwei, Li Kaihui. Electric machines and control[M]. Beijing: National Defense Industry Press, 2011.(in Chinese) [10] 段容宜, 刘英. 襟翼故障分析与维护[J]. 科技视界, 2013(35): 89-90. Duan Rongyi, Liu Ying. Flap failure analysis and maintenance[J]. Science & Technology Vision, 2013(35): 89-90.(in Chinese) 韩赛(1987-),女,硕士,工程师。主要研究方向:民机高升力系统设计、系统仿真和系统需求。 化东胜(1989-),男,助理工程师。主要研究方向:飞机发动机系统设计。 (编辑:赵毓梅) Logic of Protection for Flap’s Asymmetry Movement and Flap Skew Han Sai1, Hua Dongsheng2 (1.Flight Control and Hydraulic Pressure Institute, Xi’an Aircraft International Research &Development Center, Xi’an 710089, China)(2.Prowerplant and Fuel System Institute, Xi’an Aircraft International Research &Development Center, Xi’an 710089, China) Abstract:Improving the safety of fly-by-wire aircraft and implementing the fault protection of high lift system are of important significance.The trailing-edge flap of high lift system architectureis described, and the monitor and protection method as well as working logic of the both type faults are analyzed.Duringthe process of making sure the threshold parameter of the logic, the factors of checking and ensuring the fault, the brake process of flap power drive unit as well as the system mechanical error etc. should be considered synthetically. Finally, the simulation model of the fault protection logicis built. Several different failure conditions are simulated. Result indicates that the fault protection method can monitor the system and prevent fault from spreading. This method can be used as reference indesigningthe civil airplane high lift system. Key words:high lift system; asymmetry fault; skew fault; monitor; fault protection logic 作者简介: 中图分类号:V249.11 文献标识码:A DOI:10.16615/j.cnki.1674-8190.2016.01.009 文章编号:1674-8190(2016)01-062-08 通信作者:韩赛,hansai19870622@stu.xjtu.edu.cn 收稿日期:2015-11-03;修回日期:2015-12-21

猜你喜欢
中国交通信息化(2022年4期)2022-06-17
疯狂英语·新读写(2021年10期)2021-12-07
冰雪运动(2021年4期)2021-11-20
成都信息工程大学学报(2021年2期)2021-07-22
昆钢科技(2021年1期)2021-04-13
航天工业管理(2020年9期)2020-12-28
新世纪智能(英语备考)(2020年3期)2020-08-11
电子制作(2019年15期)2019-08-27
电子制作(2019年24期)2019-02-23
电子制作(2018年9期)2018-08-04
