
采摘机器人智能监控和路径规划设计研究
2016-03-23 08:11汪小志
农机化研究 2016年7期
吴 芳,汪小志
(1. 江西工业贸易职业技术学院,南昌 330038;2.南昌工学院,南昌 330108;3.武汉理工大学,武汉 430070)
采摘机器人智能监控和路径规划设计研究
吴芳1,汪小志2,3
(1. 江西工业贸易职业技术学院,南昌330038;2.南昌工学院,南昌330108;3.武汉理工大学,武汉430070)
摘要:为了提高采摘机器人自主导航和自动化定位能力,提升机器视觉的路径规划精度,基于TI公司的MSP430F149单片机,设计了一款具有监控终端和GPS导航功能的自动采摘机器人,实现了机器人路径规划实时处理、通讯、定位、报警一体化和自动化控制功能。通过测试发现,MSP430F149 单片机具有功耗低、体积小、操作简单,便于系统管理维护等优点。对机器人5种路径规划的总体行驶精度路、径规划的移动时间利用率、路径规划的漏采率进行了测试,通过测试发现:5种路径规划中套行法的各种指标测试效果最好。同时,结合MSP430F149单片机和PID算法,实现了采摘机器人高效自动化采摘功能,提高了机器人的采摘精度,为采摘机器人的智能化设计提供了较有价值的参考。
关键词:采摘机器人;智能监控;路径规划;自主导航
0引言
智能监控系统融和全球卫星定位系统(GPS)、无线通讯技术(GPRS) 和地理信息系统(GIS)等高科技系统,可以通过处理和分析GPS数据,将车辆的各种移动动态数据,包括经度、纬度、高度、时间、速度、车辆行驶记录等及各种报警信息实时通过GPRS无线通信传输给单片机或者监控中心。单片机或者监控中心把得到的数据进行解析处理后,可以得到被监控终端的各种行驶轨迹等具体参数,供用户进行监控和查询。单片机或者监控中心可以根据参数发出控制指令,通过机器人控制终端执行动作,实现了整个系统的实时交互功能。本文将这种原理应用到了采摘机器人的设计过程中,以期提高采摘机器人的自动导航和定位功能,从而提高果蔬采摘的效率和精度。
1总体结构设计及工作原理
采摘机器人控制系统的总体设计分为上位机和下位机两个部分,其控制核心是MSP430f149单片机,除此之外还包括供电模块、通讯串口接口模块、无线自主导航模块、报警器模块、速度传感器、位移传感器、电机模块和监控终端模块等。其中,下位机部分主要是MSP430f149单片机作为核心控制部件,电机和监控终端可以通过上位机进行操作,也可以通过无线遥控进行。传感器将采集得到的速度和温度数据传送给上位机,并且当速度和位移超过预定设置时可以发出报警。上位机的控制界面采用delphi软件编写,利用spcomm控件来实现上下位机的通讯,其总体设计框架如图1所示。
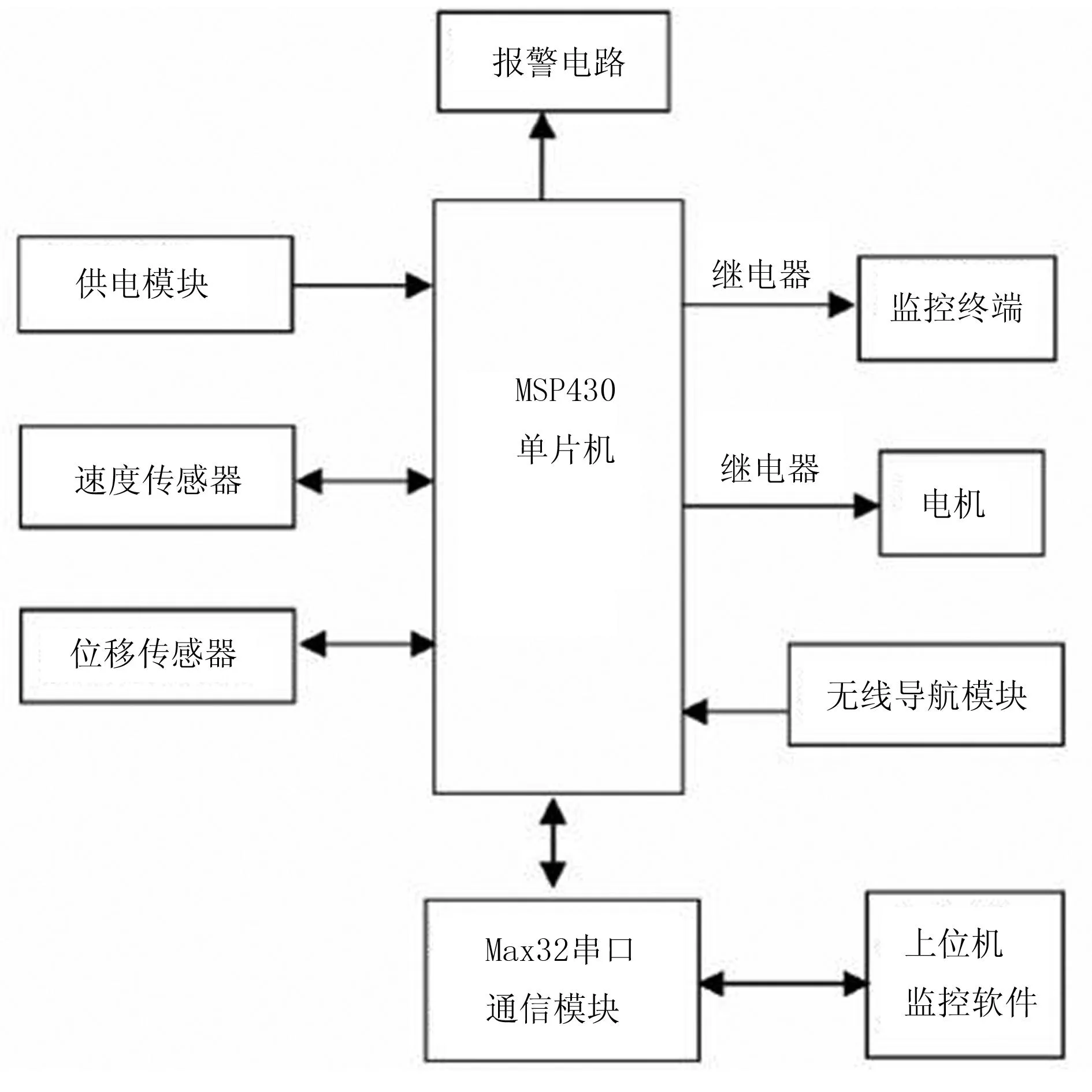
图1 系统总体结构框图
图1中,监控终端系统主要由监控中心和机器人移动终端组成,车载移动终端通过GPRS 无线通讯网络以Internet同单片机处理中心连接在一起,系统结构框架如图2所示。
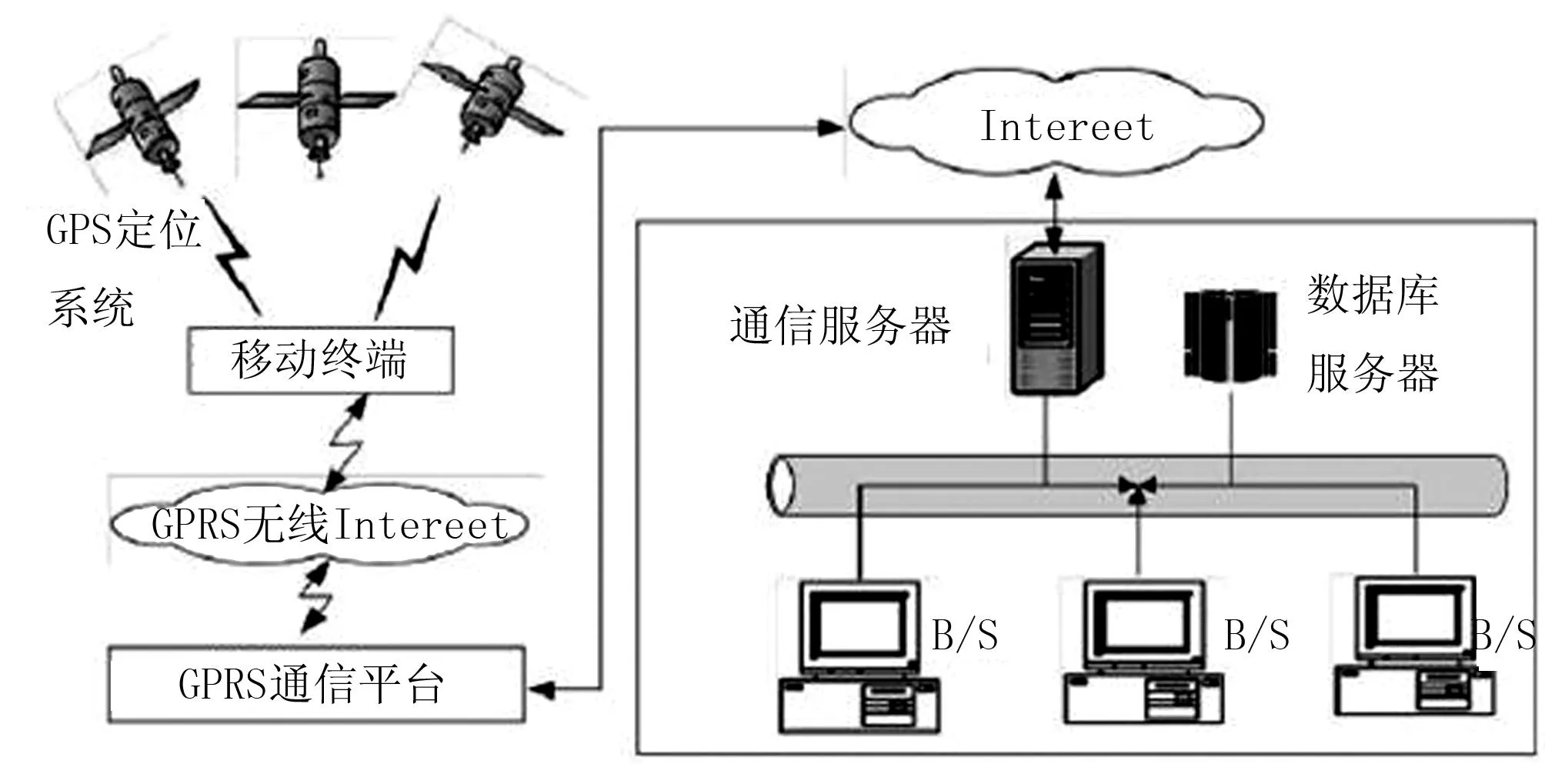
图2 机器人监控终端系统结构
采摘机器人通过监控系统终端得到的新型安装自定义传输的格式进行封装,将数据传递给移动终端GPRS通信模块,GPRS将数据通过无线Internet发送到中国移动GPRS 数据平台;再由GPRS平台经由有线Internet上传至监控中心,并利用单片机处理中心发出路径规划指令,其基本功能设计如图3所示。
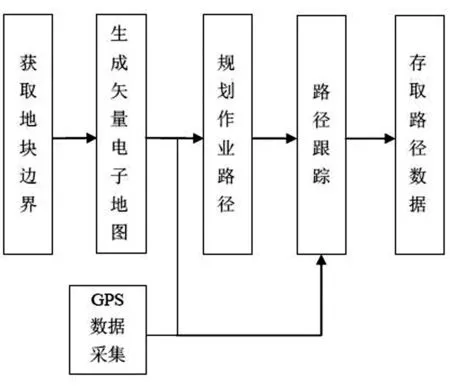
图3 采摘机器人功能设计
采摘机器人的主要功能设计分为3部分,包括获取地块信息、规划路径和路基跟踪。采摘机器人在获取地块信息后可以生产矢量化电子地图,并利用GPS采集得到的数据进行路径规划和路径跟踪,最后存取路径数据。
2监控终端和PID路径控制系统设计
采摘机器人的监控终端和车载机器视觉终端的原理结构一样,主要由4部分组成,核心部分是GPS系统和CPU处理器;通信模块由GPRS组成;人机接口系统主要包括LCD、键盘、语音,其总体框架结构如图4所示。
图4中,通信模块由GPS接收模块和GSM/GPRS通信模块组成,机器人位移的驱动电路选用IR公司的芯片IR2110,如图5所示。
机器人移动位移控制的电路原理图和用分立元件搭建的驱动电路相比较,该电路原理简单,可以驱动桥臂上的上下两个功率,可靠性高。为了提高规划路径控制的精度,需要对位移控制电流进行采样,通过采样值进行反馈。采样电路如图6所示。

图4 采摘机器人路径规划硬件系统总体框架

图5 机器人移动位移驱动电路
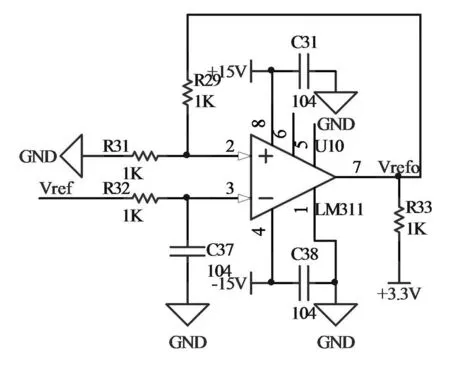
图6 反馈采样电路及峰值检测电路
采摘机器人位移反馈信号利用电压跟随器和稳压管,既可以采集反馈信号,也可以保护单片机的采集口,反馈信号对系统的条件使用PID调节。
对于机器人移动路径反馈调节的PID使用位置型PID,参数整定方法选用Z-N整定法,位移采用Simulink环境下PID参数的稳定边界法进行整定。对于指定路径后的采摘机器人运动系统的状态结构,当加入PID控制器后,可以得到如图7所示的系统PID调节图。

图7 加入PID后位置系统结构图
其中,R(s)、C(s)分别表示输入量和输出量;E(s)表示控制误差;F(s)表示位移调节函数。对于系统中的积分环节,可以使用Z-N规则的第2种方法来整定参数,假设Ti=∞,Td=0,则系统的传递函数可以写成
(1)
其中,mc表示机器人的本体质量;ml表示机械手的质量;μ表示摩擦因数;s表示位移;l表示机械手长度,则相应的闭环特征方程为
mcls4+μls3+(mc+ml)gs2+μgs+Kp=0
(2)
令s=jω,则式(2)变为
mclω4-(mc+ml)gω2+Kp+jμω(g-lω2)=0
(3)
于是得到方程组
(4)
解之得
(5)
参数整定后的位置PID传递函数为
(6)
通过传递函数可以对位移进行较高精度的控制,利用MSP430F149智能监控终端反馈的误差值作为反馈调节数值,对输入值可以进行有效的调节,从而得到期望的输出值。
3采摘机器人智能路径规划测试
为了测试本文设计的MSP430F149机器人智能监控终端和机器人路径规划的有效性和可靠性,对机器人的果蔬采摘和路径规划能力进行了测试。其中,果蔬采摘对象选择为番茄,其采摘过程如图8所示。
机器人番茄采摘的路径通过实时规划来实现,路径跟踪模块采用实时控制的方式,使用一个Timer函数来控制。数据采集过程中,采集数据间隔时间为1s,Timer函数间隔也为1s,通过数据采集得到了如图9所示的路径跟踪模型示意图。

图8 机器人番茄采摘过程

图9 路径实时跟踪示意图
根据得到的路径实时跟踪图形状特点,运用离心行走法、向心行走法、梭行法、套行法以及绕行法得到这5种路径行驶方法方案图,其规划示意图如图10所示。

图10 5种路径规划示意图
为了测试采摘机器人智能规划的效果,对机器人的行驶精度进行了计算。行驶精度一般是指实际行驶和预定行驶之间的误差,一般取偏差平均值、偏差标准差和最大偏差来衡量。经计算,5种路径规划的行驶精度如表1所示。

表1 5种路径规划的总体行驶精度
由表1可以看出:不同行走方案的行驶精度有所不同:绕行法的行驶误差最大,套行法的误差最小;采摘机器人在直线行走时,精度较高,而在转弯时偏差较大。5路径规划的移动时利用率如表2所示。

表2 5路径规划的移动时间利用率
由表2可以看出:不同的行走方案的机器人移动时间利用率有所不同,绕行法的移动时间利用率最低;而套行法的移动时间利用率最高,最高利用率达到了96.95%,采摘效率较高。5路径规划的漏采率测试如表3所示。
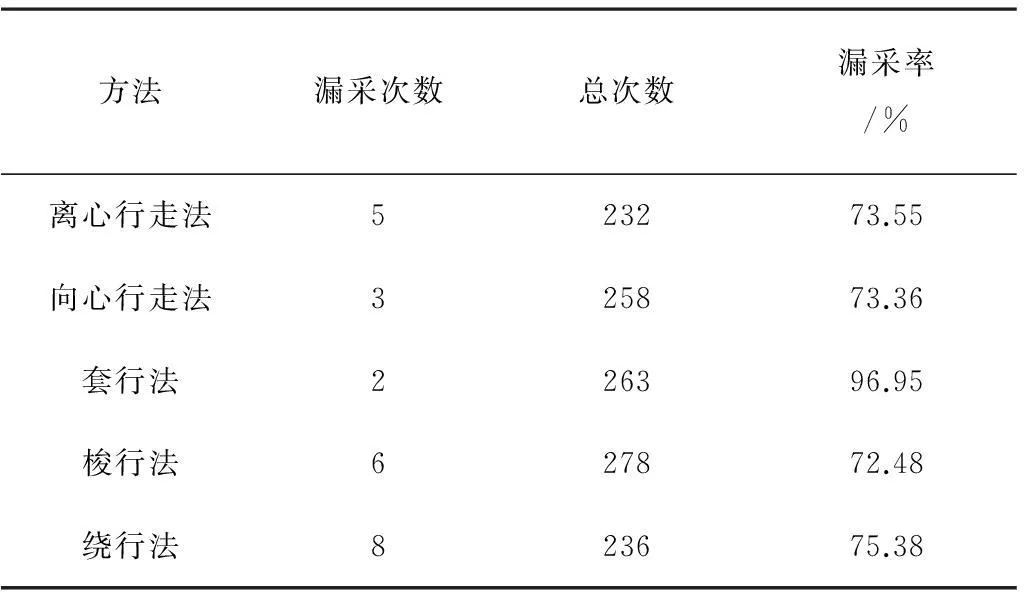
表3 5路径规划的漏采率测试
由表3可以看出:不同的行走方案的机器人的果实漏采率有所不同,绕行法的漏采率最高,而套行法的漏采率较低。综合上述,在机器人采摘智能路径规划过程中,使用套行法作为路径规划的效果最好,可以使用该方法作为智能路径规划的方法,结合MSP430F149监控终端的误差调节,可以实现路径的高精度控制,提高机器人采摘的质量。
4结论
基于TI公司的MSP430F149单片机,结合位置型PID的自动化控制功能,设计了一款新的具有自主导航和定位能力的自动化采摘机器人,并通过调试,实现了机器人路径规划实时处理、通讯、定位、报警一体化和自动化控制功能。
对机器人路径规划的功能进行了测试,测试项目主要包括机器人总体行驶精度路、径规划的移动时间利用率及路径规划的漏采率。通过测试发现:机器人对于5种路径规划的测试结果有所不同,套行法在3项测试指标中测试结果最好。因此,可以利用套行法作为机器人路径规划的方法,结合PID反馈调节功能,提高机器人路径规划的精度。
参考文献:
[1]孔德刚,张帅,杨明东,等.大功率拖拉机播种作业效率与经济性的测试分析[J].东北农业大学学报,2008,39(4):7-13.
[2]孔德刚,赵永超,刘立意,等.功率农机作业效率与机组合理运用模式的研究[J].农业工程学报,2008,24(8):143-146.
[3]纪晴,段培永,李连防,等.移动机器人全覆盖路径规划算法综述[J].山东建筑大学学报,2007, 22(4):354-358.
[4]王俭,陈卫东,赵鹤鸣.移动机器人全覆盖路径规划优化方法[J].计算机工程,2005,31(22):162-163.
[5]吴修文,冯晓霞,孙康岭,等.农用机器人导航电子地图的研究[J]. 农业装备与车辆工程,2010(3):40-42.
[6]韩高楼.GPS定位技术的优缺点[J].陕西建筑,2010(2):56-58.
[7]栾宝宽,田华明,张磊.GPS 定位误差的影响因素分析[J].中国科技信息,2010(9):132-133.
[8]陈文良,谢斌,宋正河,等.拖拉机电控液压动力转向系统的研究[J].农业工程学报,2006, 22(10): 122-124.
[9]徐文兵,高飞.天宝Trimble AgGPS 332 单点定位在林业测量中的应用探析[J].浙江林学院学报, 2010,27(2):310-315.
[10]张楠,董晓晶,张健.WGS-84坐标系与BJ-54坐标系的转换方法及精度探讨[J].制造业自动化, 2009, 31(12):162-164.
[11]朱向庆,陈志雄.采用GPS 和GPRS的移动目标监控导航系统设计[J].计算机测量与控制,2011, 19(5):1133-1136.
[12]王俭,陈卫东,赵鹤鸣.移动机器人全覆盖路径规划优化方法[J].计算机工程, 2005,31(22): 162-163.
[13]吴修文,冯晓霞,孙康岭,等.农用机器人导航电子地图的研究[J].农业装备与车辆工程,2010(3):40-42.
[14]朱向庆,陈志雄.采用GPS 和GPRS 的移动目标监控导航系统设计[J].计算机测量与控制,2011, 19(5):1133-1136.
[15]李界家,陈浩,李颖.神经网络迭代算法解耦控制在中央空调系统中的应用[J].沈阳建筑大学学报,2012,28(1):182-186.
[16]徐文兵,高飞.天宝Trimble AgGPS 332 单点定位在林业测量中的应用探析[J].浙江林学院学报,2010,27(2):310-315.
[17]张楠,董晓晶,张健.WGS-84 坐标系与BJ-54 坐标系的转换方法及精度探讨[J].制造业自动化,2009,31(12):162-164.
[18]李红,沈冬.基于ArcGlS Engine 的地理信息数据库设计与实现[J].测绘与空间地理信息,2009,32(4):74-76.
[19]李文国.导航电子地图的设计与实现[J].科技资讯,2008(30):3.
[20]陈文良,谢斌,宋正河,等.拖拉机电控液压动力转向系统的研究[J].农业工程学报, 2006,22(10):122-124.
[21]韩高楼.GPS定位技术的优缺点[J].陕西建筑,2010(2):56-58.
[22]李洪欣,杨建中.基于两参数的表冷器建模方法研究[J].建筑热能通风空调,2009,28(6):15-17.
Design of Intelligent Monitoring and Path Planning in Picking Robot
Wu Fang1, Wang Xiaozhi2,3
(1.Jiangxi Vocational Technical College of Industry Trade, Nanchang 330038, China;2.Nanchang Institute of Science & Technology, Nanchang 330108,China;3.Wuhan University of Technology, Wuhan 430070,China)
Abstract:In order to improve the picking robot autonomous navigation and automatic positioning capability and improve the accuracy of path planning for the machine vision, based on MSP430F149 of TI company,it designs a function automatic picking robot with the monitoring terminal and GPS navigation, the robot path planning in real-time processing, communication, location and alarm integration and automation control function.Through the test, the MSP430F149 micro controller has the advantages of low power consumption, small size, simple operation, and easy to maintain the system management and maintenance.5 robot path planning for the overall running accuracy and path planning of mobile time utilization, path planning leakage recovery rate were tested, it was found by test that five kinds of path planning method for various index to test the effect best, combined with MSP430F149 MCU and PID algorithm, to realize picking robot, automatic picking function, which can improve the robot's picking accuracy and provides a valuable reference for the picking robot intelligent design.
Key words:picking robot; intelligent monitoring; path planning; autonomous navigation
文章编号:1003-188X(2016)07-0040-05
中图分类号:S225;TP399
文献标识码:A
作者简介:吴芳(1982- ),女,南昌人,讲师,硕士。通讯作者:汪小志(1981-),女,武汉人,副教授,博士研究生,(E-mail) wangxiaozhi@ncu.edu.cn。
基金项目:湖北省自然科学基金项目(2014CFC1079);湖北省自然科学基金计划面上项目(2013CFB418)
收稿日期:2015-06-16
猜你喜欢
中国新通信(2016年22期)2017-01-13
中国科技纵横(2016年20期)2016-12-28
电子技术与软件工程(2016年22期)2016-12-26
电脑知识与技术(2016年28期)2016-12-21
电子技术与软件工程(2016年20期)2016-12-21
科技视界(2016年26期)2016-12-17
电脑知识与技术(2016年26期)2016-11-25
科技视界(2016年20期)2016-09-29
电脑知识与技术(2016年10期)2016-06-16
物联网技术(2015年9期)2015-09-22
