
基于传感和信息采集的自主导航免耕播种机设计
2016-03-23 08:11:32胡应占郭素娜余良俊
农机化研究 2016年7期
胡应占,郭素娜,余良俊
(1.河南工业职业技术学院,河南 南阳 473000;2.武汉工程科技学院,武汉 430200;3.中国地质大学 机械与电子信息学院,武汉 430070 )
基于传感和信息采集的自主导航免耕播种机设计
胡应占1,郭素娜1,余良俊2,3
(1.河南工业职业技术学院,河南 南阳473000;2.武汉工程科技学院,武汉430200;3.中国地质大学 机械与电子信息学院,武汉430070 )
摘要:为了提高免耕播种机的自动化程度,设计了一款新的具有自主导航和路径规划功能的免耕播种机。该播种机能够很好地估算出入射信号的个数和方向,克服了传统定位精度低的缺点,可以有效解决密集信号环境中多个辐射源的高分辨率、高精度测向定位问题。为了验证免耕播种机的性能,对使用DOA估计信号后的播种机进行了性能测试。测试发现:其播种误差要明显小于单纯使用最小二乘法和双曲线测量法,播种合格率最高达到了98.7%,变异系数最低为1.35%,播种的精确性和稳定性较高。通过对比传统播种机和本文设计播种机的播种时间,本文设计的播种机播种时间有所缩短,播种效率有了大幅度的提高,免耕播种性能好,可以在自动化播种作业中进行推广。
关键词:免耕播种;自主导航;DOA估计;分辨率;稳定性
0引言
保护性耕作播种通过对农田实行免耕、少耕等方式保护田间地表,减少土壤风蚀、水蚀对地表的伤害,从而提高土壤的肥力和抗干旱的能力。但是,当遇到春节播种时间气温低和雨水少的情况时,会阻碍农业的可持续发展。为了提高种子的发芽率,垄作成为春季播种种植的主要模式。一般传统的春季播种种植方式先对田间进行起垄,然后使用播种机进行播种、修复田垄,最后进行镇压等。该种植方式对土壤的扰动很大、土壤失水严重、土壤风蚀加重,机具反复进入田间增加了能耗,提高了作业成本、破坏了土壤的自身基本结果,不利于现代化农业的可持续发展。因此,采用保护性免耕播种,不仅可以提高作业效率,而且可以保护地表和土壤肥力,增收增产。为此,本文对一款免耕播种机的自主导航系统进行了设计,以期提高免耕播种的精度和速度。
1自主导航免耕播种机总体设计
目前,在垄作地实行保护性耕作技术还缺少相应的能够较好满足农艺要求套播种机具。因此,为了更好地促进保护性耕作技术与垄作技术相结合,需要研制一种能够在原垄上实现免耕播种作业且对垄形破坏小及播种后垄形保持好的新型垄作免耕播种机。本文设计了一种新的具有自主导航能力的免耕播种机,总体设计框架如图1所示。

图1 自主导航免耕播种机设计
图1中,定位方式使用双曲线定位,信号的方向使用DOA进行估计,通过信号的方向使用A/D转换功能调整伺服控制电机,从而完成自主导航和路径规划功能,流程如图2所示。
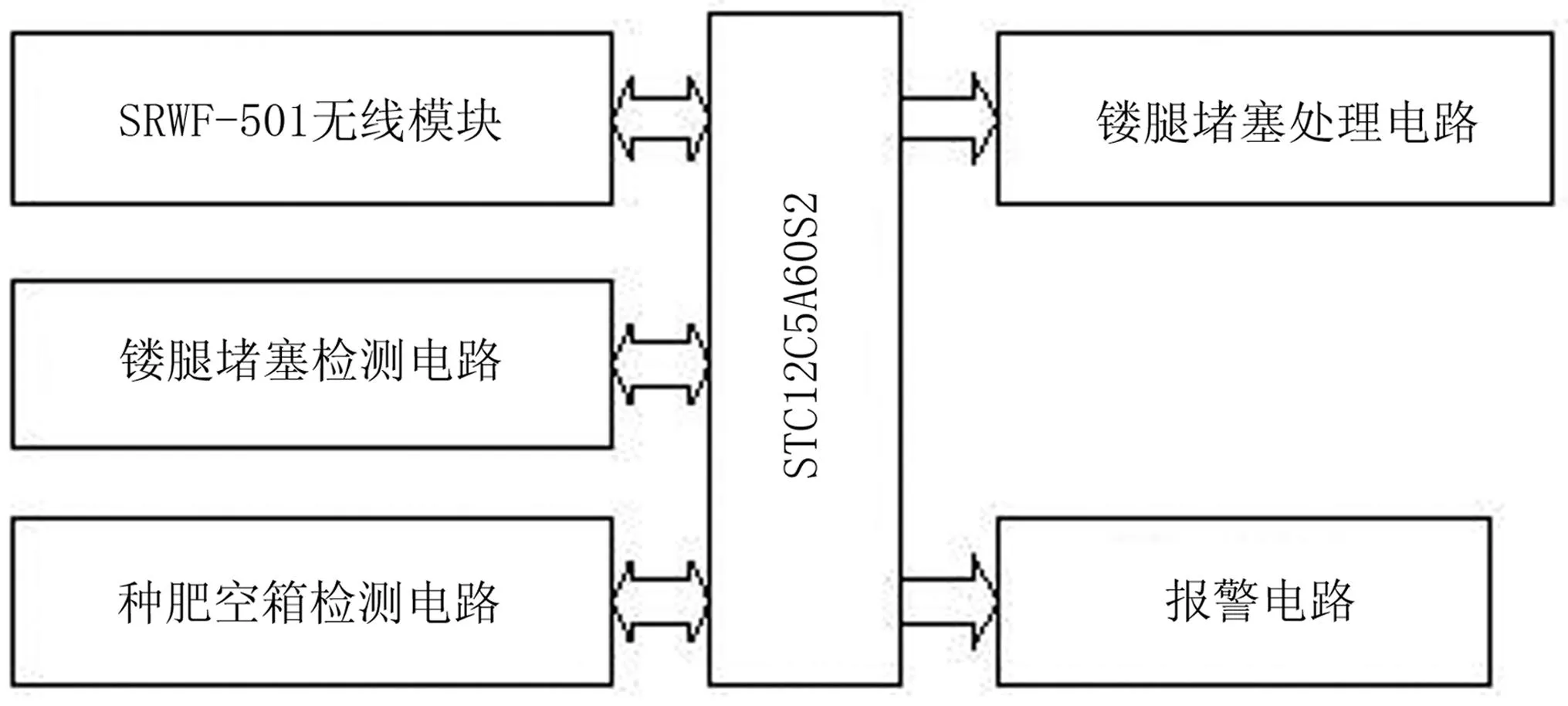
图2 耕播监控分机系统构成
耕播监控分机系统以STC12C5A60S2作为主控芯片,外围的有nRF905无线模块、镂腿堵塞检测电路及模拟量信号调理电路,发送函数占用主函数运行时间。当向上位机发送数据时,CPU完全被发送函数占用,直到发送完成。
免耕播种机定位通信的原理如图3所示。首先免耕播种机向上位机发送字节,CPU之前处于等待状态,当接受到字节后,对发送字节的位置开始搜索,最终完成定位功能。

图3 通信原理图
2免耕播种机结构和自主导航系统设计
免耕播种机的主要机械结构和部件包括孔式的排种器,主要由输肥管、导种管、输种管、开沟器、覆土器和镇压器等组成,来实现播种机的一次性播种(包括开沟、施肥、播种、压种和覆土)的全过程。
图4为新款的播种机结构设计示意图。在机架总成装有摄像头和传感器,通过摄像头可以完图像的采集。要实现播种机的自主导航系统,首先需要设计排种器的结构和形状,如图5所示。

1.传动装配 2.肥箱装配 3.机架总成 4.支承轮装配

图5 排种器设计图

(1)
而M到AP1和到各其他AP的距离差为
(2)
求解上述二元方程组就可以得到两个解,即双曲线的两个交点。其中,一个为M点的坐标。对于信号可以使用滤波算法降低噪声信号的干扰,其基本原理是去除小概率的数据,降低随机干扰数据的误差。假设对数正态分布模型可对电磁波田间传播情况进行如下近似,则有
(3)
其中,d为定位距离,ζ是遮蔽因子,PL是距离为d时信号损耗,γ是路径损耗系数,Pr是接收到的信号功率,Pt是发射机发送的功率,d0是参考距离,PL0是距离为d0时的信号损耗,用自由空间传播模型来得到PL0值。
为了实现滤波功能,使用DOA估计算法对信号进行滤波,假设DOA估计的目标是在给定N个快拍数据x(1),…,x(N),用某种算法估计k个信号的DOA值θ1,…,θk,其信号估计的基本原理如图6所示。
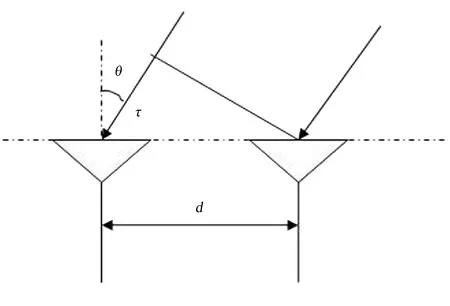
图6 DOA估计原理图
图6中,考虑两个阵元,d为阵元间的距离,c为光速,θ为远场信号的入射角,φ为阵元间的相位延迟,则天线所接收的信号由于波程差为
(4)
从而可得两阵元间的相位差为
(5)
其中,f0表示指中心频率,对于窄带信号,相位差为
(6)
其中,λ为信号波长。因此,只要知道信号的相位延迟,就可以求出信号的来向,从而实现免耕播种机的自主导航和定位功能。
3自主导航免耕播种机性能测试
为了测试本文设计的免耕播种机的自主导航能力,对其接受信号DOA估计、系统响应误差及播种效果和播种效率进行了测试。首先测试面耕播种机导航的抗干扰能力,在信号接受的噪声方面使用高斯白噪声,阵元间距为入射信号波长的1/2,信噪比为30dB,阵元数为8,采样快拍次数为300。通过仿真计算得到了DOA谱函数分布,如图7所示。

图7 ROOT-MUSIC算法的DOA估计谱
由图7可以看出:采用ROOT-MUSIC算法可以有效地绘制谱峰,从而能够很好地估算出入射信号的个数和方向,克服了传统定位精度低的缺点,可以有效解决密集信号环境中多个辐射源的高分辨率、高精度测向定位问题。
图8为在不同算法情况下播种误差的对比结果曲线。由图8可以看出:使用DOA估计信号后,其播种误差要明显小于单纯使用最小二乘法和双曲线测量法。对播种效果进行测试后,得到了表1所示的结果。

图8 播种误差不同算法对比
通过测试发现:播种的深度可以达到41 mm,施肥深度85mm,肥料之间的间距是43mm,合格率最高达到了98.7%,变异系数最低为1.35%。表明使用本文设计的免耕播种机播种效果较好。通过对比传统播种机和本文设计播种机的播种时间,得到了如表2所示的结果。
表1免耕播种机播种效果
Table 1The seeding effect of no-till planter
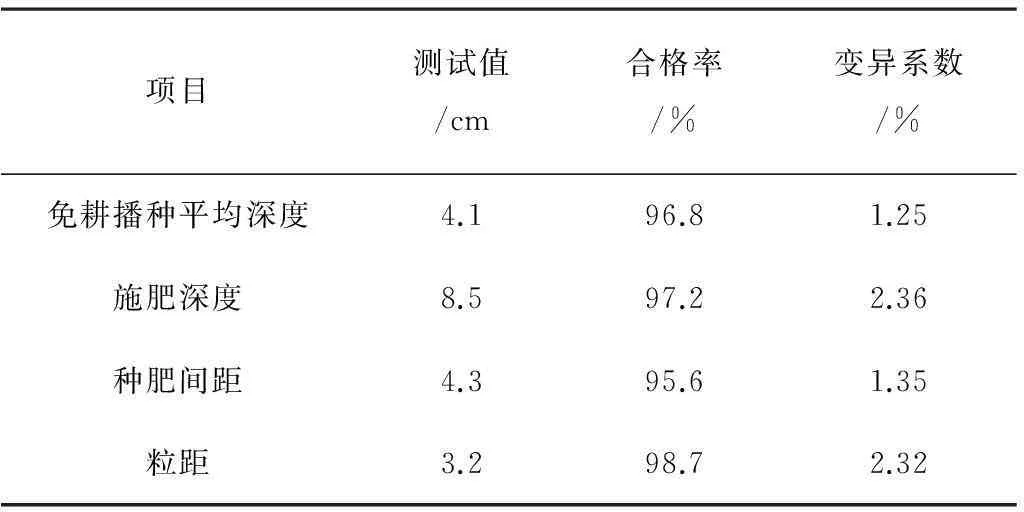
项目测试值/cm合格率/%变异系数/%免耕播种平均深度4.196.81.25施肥深度8.597.22.36种肥间距4.395.61.35粒距3.298.72.32

表2 播种时间测试结果
由表2可以看出:相对于传统的播种机,本文设计的免耕播种机播种时间有所缩短,播种效率有了大幅度提高。
4结论
1)采用双曲线定位和信号DOA估计,设计了一款新的具有自主导航和路径规划功能的免耕播种机,能够很好地估算出入射信号的个数和方向,提高了定位的精度和分辨率。
2)为了验证免耕播种机的性能,对免耕播种机进行了性能测试。通过测试发现:其播种误差较小,播种合格率最高达到了98.7%,变异系数最低为1.35%,播种的精确性和稳定性较高。通过对比传统播种机和本文设计播种机的播种时间,播种效率有了大幅度的提高。
参考文献:
[1]顾峰玮,胡志超,王海鸥,等.鸭嘴滚轮式花生播种器设计与运动轨迹[J].中国农机化,2010(4):60-63.
[2]刘仕昌,陈鹏,徐平.小型畜力花生播种机的设计[J].中国农机化,2013,34(2):70-72.
[3]吕小莲,刘敏基,王海鸥,等.花生膜上播种技术及其设备研发进展[J].中国农机化,2012(1):89-92.
[4]李国林,宋炜,毛俐,等.国内外几种主要排种器的特点[J].农业科技与装备,2011(8):70-73.
[5]王丽艳,郭树国,邱立春.免耕技术及免耕播种机的发展.农机化研究,2006(2): 34-35.
[6]马淑英,陈立东,冯利臻,等.2BMFS-3型穴灌半精量玉米播种机的设计[J].农机化研究,2008(1): 116.
[7]罗昕,胡斌,黄力烁.气吸式穴盘育苗精量播种机的设计与试验[J].农机化研究,2010,32(11):130-132, 140.
[8]夏红梅,李志伟,甄文斌.气力板式蔬菜排种器设计与试验[J].农业机械学报,2010,41(6):56-60.
[9]胡斌,董春旺.气吸式穴盘精量播种机吸嘴吸附性能的试验研究[J].石河子大学学报,2009,27(1):100-103.
[10]何菊,吴建民.畦作沟灌小麦起垄播种机的研究与设计[D].兰州:甘肃农业大学,2007:17-19.
[11]董丽梅.山地播种机的研究与设计[D]. 兰州:甘肃农业大学,2009:19-21.
[12]徐云峰.小型免耕播种机的设计及试验研究[D].北京:中国农业大学,2005:22-24.
[13]高焕文,李问盈,李洪文.中国特色保护性耕作技术[J].农业工程学报,2003,19(3):1-4.
[14]王晋生,王桂英.小麦机械化播种实践[J].农业技术与装备,2009(9):21-22.
[15]刘蕴贤,倪道明,李从华,等.不同施肥方法对水稻生长及稻田周围水体污染的影响[J].天津农业科学,2007,13(1):31-34.
[16]吴子岳,高焕文,张晋国.玉米秸秆切断速度和切断功耗的试验研究[J].农业机械学报,2002,32(2):38-41.
[17]何伟,陈彬,张玲.DSP/BIOS 在基于 DM642 的视频图像处理中的应用[J].信息与电子工程, 2006, 4(1): 60-62.
[18]龚菲,王永骥.基于神经网络的PID参数自整定与实时控制[J].华中科技大学学报:自然科学版,2002,30(10): 298-305.
[19]赵望达,鲁五一,徐志胜,等.PID控制器及其智能化方法探讨[J].化工自动化及仪表,1999,26(6):45-48.
[20]谷传纲,阎防,王彤.采用改进的BP神经网络预测离心通风机性能的研究[J].西安交通大学学报,1999,33(3):43-47.
[21]郭艳兵,齐古庆,王雪光.一种改进的BP网络学习算法[J].自动化技术与应用,2002,26(2):13-14.
[22]郝冬,刘斌.基于模糊逻辑行为融合路径规划方法[J].计算机工程设计,2009,30(3):660-663.
[23]王建军,武秋俊.机器人在农业中的应用[J].农机化研究,2007(7):174-176.
[24]王俭,赵鹤鸣,陈卫东.基于子区域的机器人全覆盖路径规划的环境建模[J].苏州科技学院学报:工程技术版,2004,17(1):72-75.
[25]冯秀军,杨立东.2BDY-8型2垄密型高速气吹式精密播种机简析[J].农业机械,2007(8):85-86.
[26]王建军,武秋俊.机器人在农业中的应用[J].农机化研究,2007(7):174-176.
[27]郝冬,刘斌.基于模糊逻辑行为融合路径规划方法[J].计算机工程设计,2009,30(3):660-663.
[28]王建军,武秋俊.机器人在农业中的应用[J].农机化研究,2007(7):174-176.
Design of Autonomous Navigation No-till Planter Based on Sensing and Information Collection
Hu Yingzhan1, Guo Suna1,Yu Liangjun2,3
(1.Henan Polytechnic Institute, Nanyang 473000, China; 2.Wuhan University of Engineering Science,Wuhan 430200, China;3.Faculty of Mechanical & Electronic Information,China University of Geosciences,Wuhan 430074, China)
Abstract:In order to enhance the automation of no-till planter, a new no-till planter having function of autonomous navigation and path planning has been designed, the planter can good estimate the number of the incoming signal and direction, and overcome the shortcomings of traditional low positioning accuracy, which can effectively solve the dense signal environment, multiple sources of high resolution, high accuracy direction-finding location problem. In order to verify the performance of no-till planter, the use of signal DOA estimation of seeder was carried out after the performance test, through test, found that the seeding error significantly less than simply using least square method and hyperbola method, seeding rate reached 98.7%, the highest coefficient of variation of the lowest 1.35%, seeding accuracy and high stability, and design in this paper by comparing the sowing time of traditional planter, the planter designed in this paper sowing time was shortened, sowing efficiency has improved greatly, the no-till seeding performance is good, which can be replicated in automation in the planting operation.
Key words:no-till seeding; autonomous navigation; DOA estimation;resolution; stability
文章编号:1003-188X(2016)07-0035-05
中图分类号:S223.2
文献标识码:A
作者简介:胡应占(1972-),男,河南舞钢人,副教授,硕士。通讯作者:余良俊(1984-),女,武汉人,副教授,博士研究生,(E-mail)yuliangjun1984@126.com。
基金项目:湖北省自然科学基金项目(2014CFC1079);2.湖北省自然科学基金计划面上项目(2013CFB418)
收稿日期:2015-05-29
猜你喜欢
数学物理学报(2021年5期)2021-11-19 07:01:16
石油沥青(2021年4期)2021-10-14 08:50:44
自动化学报(2019年6期)2019-07-23 01:18:32
数学物理学报(2019年3期)2019-07-23 01:15:40
家庭影院技术(2018年9期)2018-11-02 05:31:32
数学物理学报(2018年1期)2018-03-26 08:16:44
自动化学报(2017年5期)2017-05-14 06:20:52
成都信息工程大学学报(2017年6期)2017-03-16 03:04:32
厦门理工学院学报(2016年1期)2016-12-01 04:50:51
浙江大学学报(工学版)(2015年6期)2015-03-01 01:18:22
