
基于人工势力场和遗传算法的播种机路径规划设计
2016-03-23 08:11马继红
农机化研究 2016年7期
马继红
(河南理工大学 万方科技学院, 郑州 451400)
基于人工势力场和遗传算法的播种机路径规划设计
马继红
(河南理工大学 万方科技学院, 郑州451400)
摘要:为了提高播种机对复杂地块的自适应能力,提升播种机的播种精度和播种效率,提出了适合精播机的基于子区域的折返全区域覆盖路径规划方法,并对播种机的排肥器和排种器进行了改进,以适应自动路径规划的需要。为了优化基于子区域的路径搜索方法,使用人工势场和遗传算法对寻优方法进行了优化,提高了算法的效率。为了测试该方法的有效性和可靠性,将路径规划系统安装到了播种机械上,通过对播种的测试发现,该方法实现了复杂地块播种的全区域覆盖,并且可以有效地躲避障碍物。对3种不同的算法进行对比测试发现:基于遗传算法的子区域路径规划模型的寻优效果最佳,其覆盖面积大,转弯次数少,用时少,最短时间为11.25min,仅为其他算法时间的1/2,路径划分效率较高,满足智能化精密播种机的需求,可以在精密播种机的路径规划系统中使用。
关键词:人工势力场;精密播种机;遗传算法;路径规划;覆盖面积
0引言
随着人工智能技术和精细农业技术的不断发展,高精度智能化播种机械逐渐被实际应用到农业生产过程中,有效地提高了劳动生产率,缓解了农业劳动力的不足。精播机的设计过程中,其路径规划能力是非常重要的,是精密播种机智能化、自动化设计的关键。精密播种机要完成耕地、施肥和播种工作,首先要结合实际地块自主的规划出播种路径,有效地避开障碍物的影响,并对规划好的路径进行追踪,实现自动化播种功能。规划路径决定了播种机的有效播种覆盖面积,是智能化播种的设计关键,因此对其研究具有重要的现实意义。
1精播机总体设计
精密播种机械中最主要的设计结构是排种器的设计,精播机的总体设计主要包括车体本体结构、控制系统和驱动系统等。控制系统又包括上位机、操作员、编码器、路由器和 DGPS,如图1所示。
该播种机结构改变了传统纯机械式的精密播种机设计方法,使用自动化控制的方式对播种机的结构和运动系统进行控制,使播种机面对复杂地块进行自动化路径划分成为可能。排肥量的自动化调节也是自动化高精度播种机设计的关键,本次设计的精密播种机可以根据路径规划后的地块情况,利用振动板对肥量进行调节,移动振动调节板,可以改变排肥孔的数目,实现不同排肥量的调节。排肥器、排种器设计如图2和图3所示。
排种器是保证精密播种的关键,因此对于排种器的自动设计更为重要。本次设计依据自动化路径规划原理,采用链条式的排种器结构,在完成路径规划后,使用编程控制的方法对链条的速度进行控制,使其满足不同地块播种的需要,并且播种速度可以根据播种机的行走速度进行调节,使其最大程度地满足不同地块播种的需要。
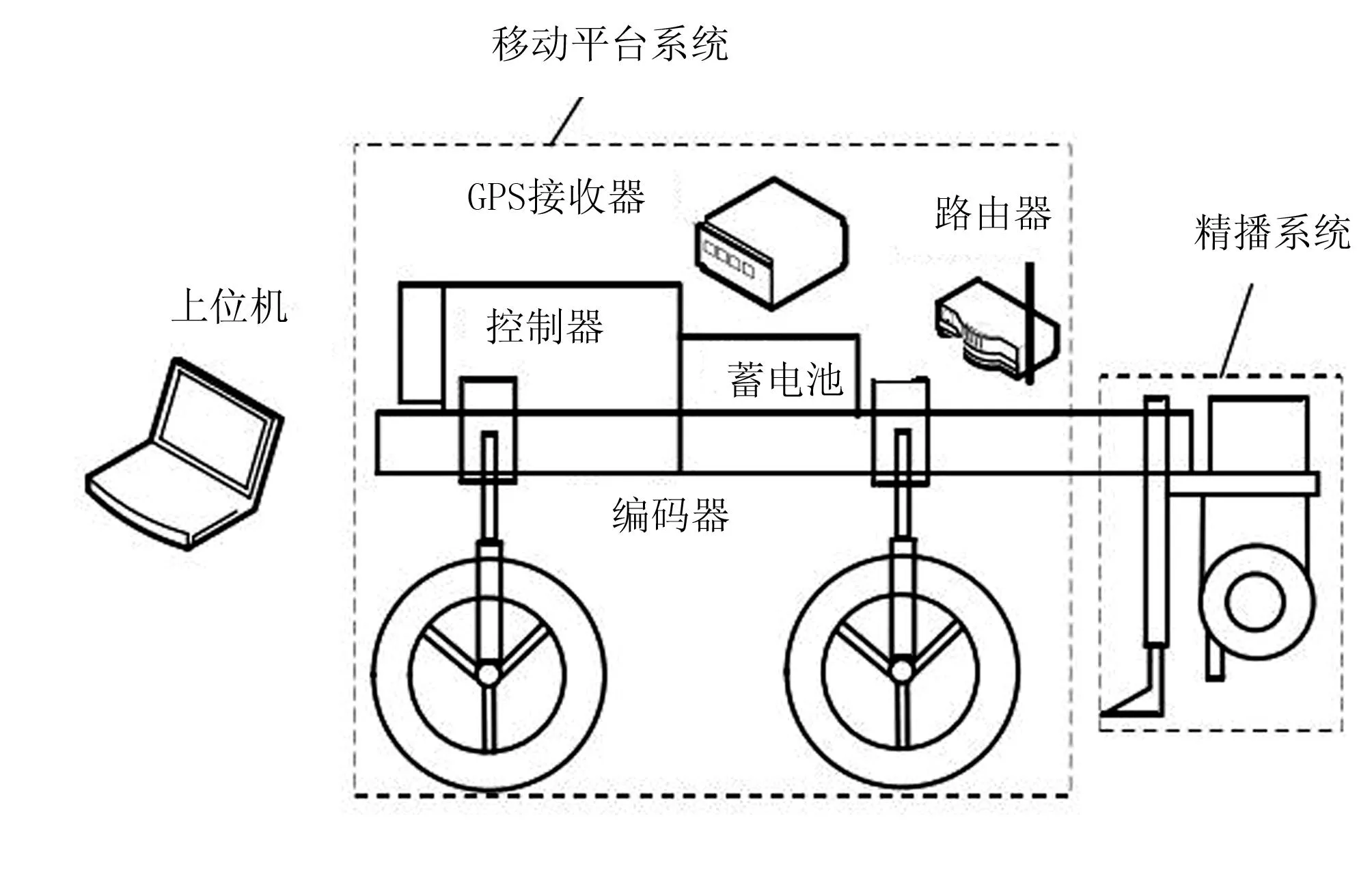
图1 整体结构设计框图
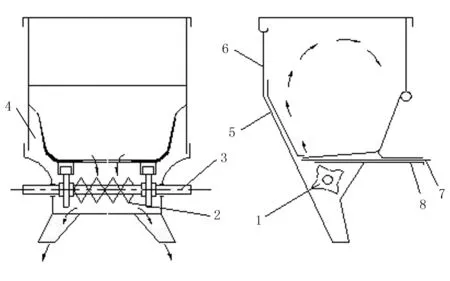
1.排肥凸轮 2.弹簧搅龙 3.排肥轴 4.振动板
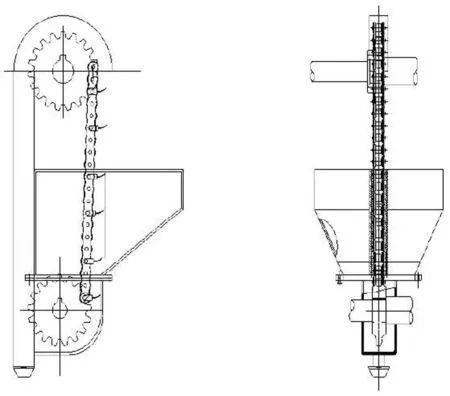
图3 排种器设计
2基于人工势场和遗传算法的路径规划
人工势场路径规划算法主要包括3个部分:一是输入,包括播种机的初始姿态qi、目标姿态qg及障碍物信息;二是输出,使用位姿序列连接的qi和qg;三是过程,从qi开始计算当前位姿qk的势力场函数F(qk),并沿着前进方向时间步长为δk进行迭代计算,一直算到搜索到目标qg后结束,时间步长必须足够小,从而保证规划路径不会碰到障碍物,其流程如图4所示。
人工势场法的路径规划主要过程是搜索目标姿态的函数,在搜索过程中需要利用子块划分方法,避免开障碍物,这就需要借助智能算法来进行自动寻优。采用遗传算法对路径进行寻优的过程如图5所示。
基本遗传算法以子块划分的所有子块个体为研究对象,使用选择、交叉和变异手段进行遗传操作,使路径规划达到最优。在一般的算法中,其优化过程实际是求得函数g(x)的最小值;而在遗传算法寻优中,则是求取适应函数的极大值,因此需要采用公式对过程进行转换。表达式为
(1)
其中,qmax为适应系数,该值可以取q(x)的最大值。qmax是遗传算法的前一代中q(x)的最大值,在寻优过程中,最主要的是变异操作,变异的主要步骤为两步:①在路径画分子块中,假设子块的基因座位变异点;②对每一个变异点,以一定的变异概率从对应的路径划分子块的取值范围内取一随机数来替代原子块。
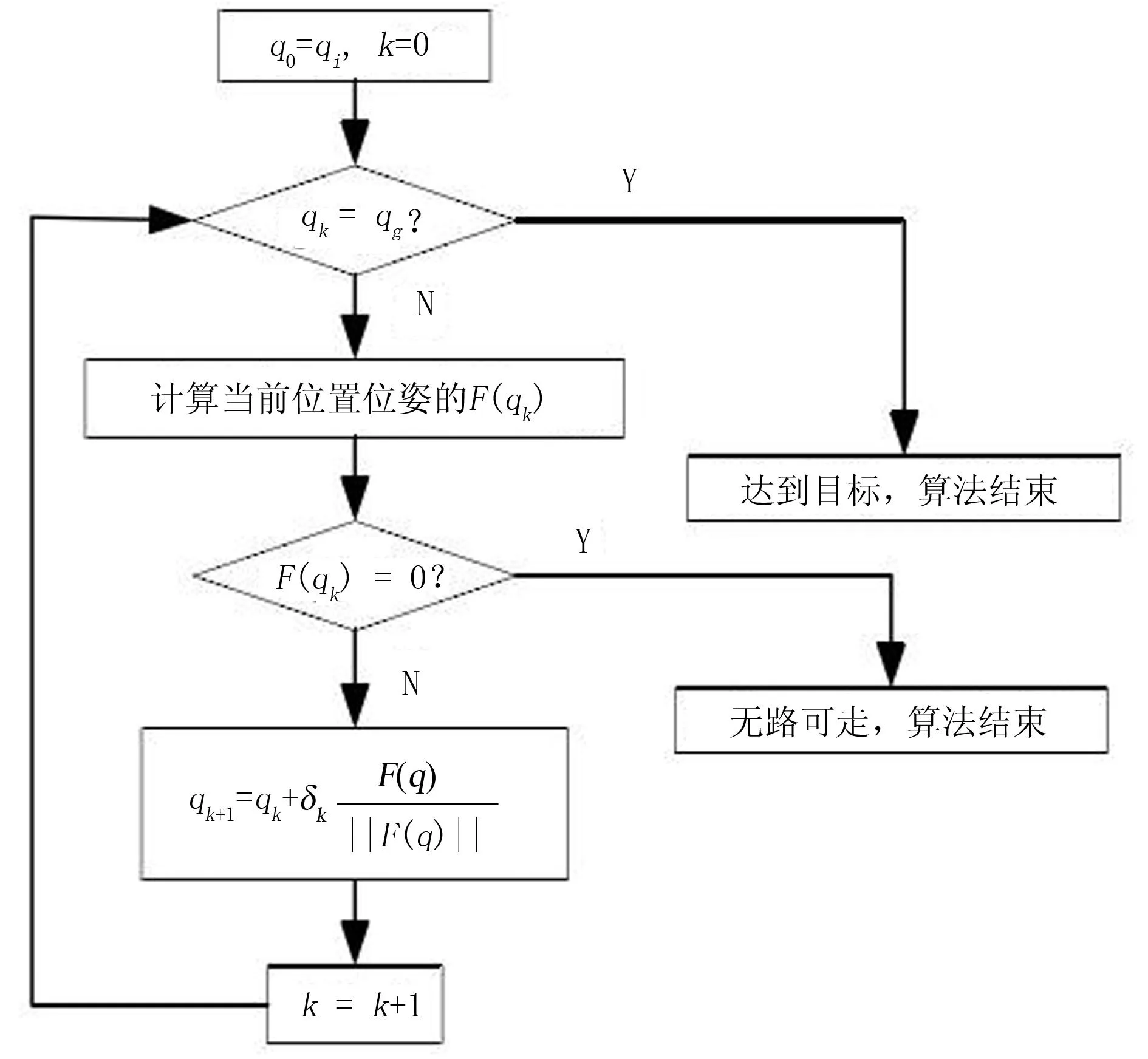
图4 人工势场法路径规划流程图
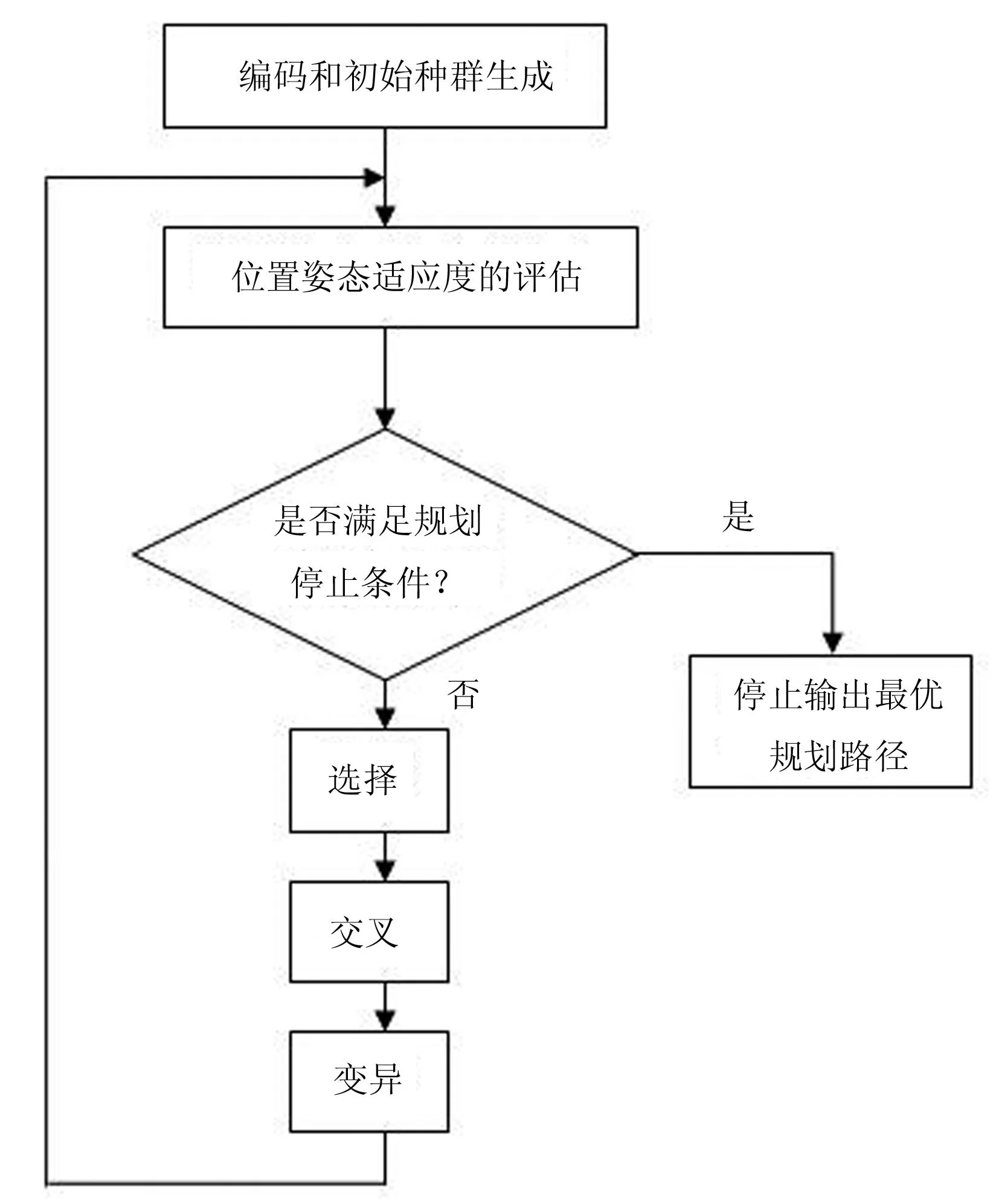
图5 基本遗传算法的路径寻优流程图

X′=Ukmin+r·(Ukmax-Ukmin)
(2)
其中,r为[0,1]围内符合均匀分布的一个随即数。遗传算法路径寻优的具体过程如下:
1)首先确定存在障碍物的区域的子区域的大致范围,利用编码长度对其进行编码;
2)随机产生n个子区域,构成初始种群区域P(0);
3)对种群中的各个体进行解码,得到对应的参数值,用此参数值来求代价函数和适应函数;
4)使用遗传算法的交叉、复制和变异功能对种群进行操作,产生下一代种群;
5)重复步骤3)和4),直至参数收敛或达到预定的指标。
通过以上步骤,可以完成在有障碍物地块中,子块的划分以及路径的智能寻优过程,将该算法可以封装到路径规划系统中,使用在播种机的控制系统中。
3精密播种机路径规划性能测试
为了验证播种机自动路径规划性能的有效性和可靠性,在田间对播种机的播种性能进行了测试,并对比了不同路径规划方法的测试数据。测试项目主要是在有障碍物的复杂地块,测试使用的播种机械如图6所示。

图6 精密播种机测试
在精密播种机上装有路径规划系统,为了验证其有效性,选择有障碍物的复杂地块进行试验。首先对遗传算法的路径寻优进行测试,测试结果如图7所示。
图7中,黑色区域代表障碍物,利用栅格法对整个区域进行编码,并使用遗传算法进行路径寻优,得到了如图7所示的最优路径,从而验证了该算法的寻优的有效性。
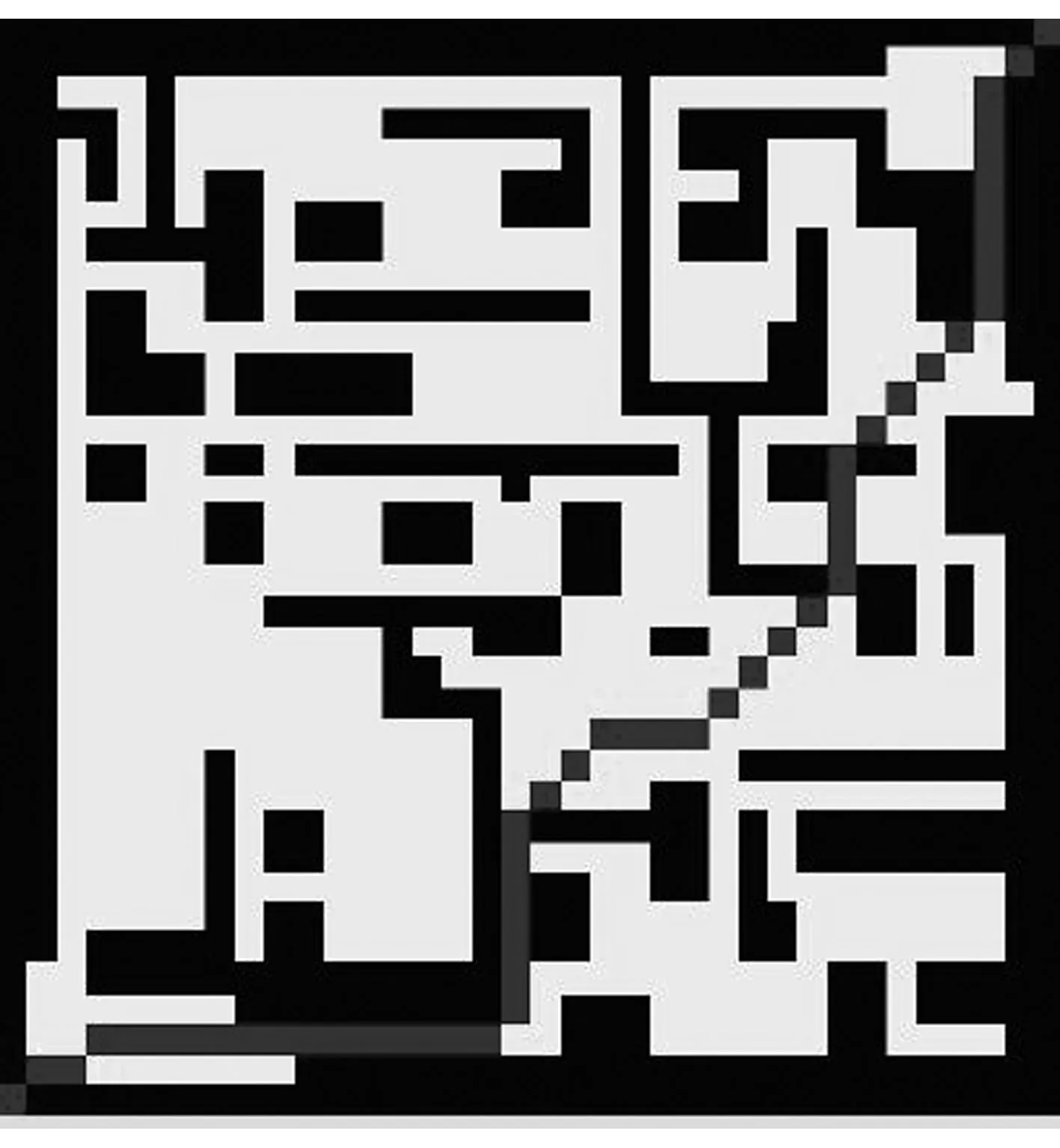
图7 有障碍物时寻优路径
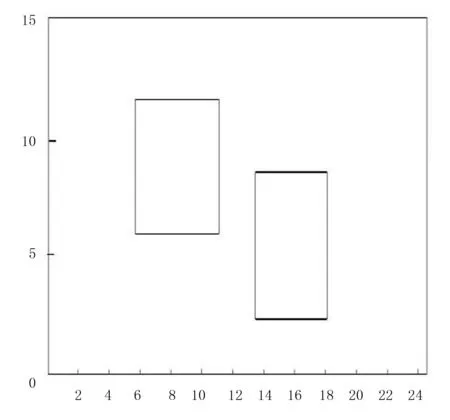
图8 含障碍物地块
为了进一步验证播种机路径规划的有效性和可靠性(见图8),建立了含有障碍物区域的环境信息图,假设地块中有两个大矩形障碍物,使用子区域遗传算法分割方法得到了如图9所示的区域子块。
图9中,把含有若干障碍物的区域划分成若干单元,每个单元构成一个不含有障碍物的自由区间;然后过每个障碍物的Ymax、Ymin作平行于区域主轴X的切线,切线两端分别与区域的边界或其他障碍物相交,使原区域被划分层多个不含有障碍物的子区域,利用栅格对子区域进行遗传算法编码;通过计算,最终得到了如图10所示的路径规划结果。
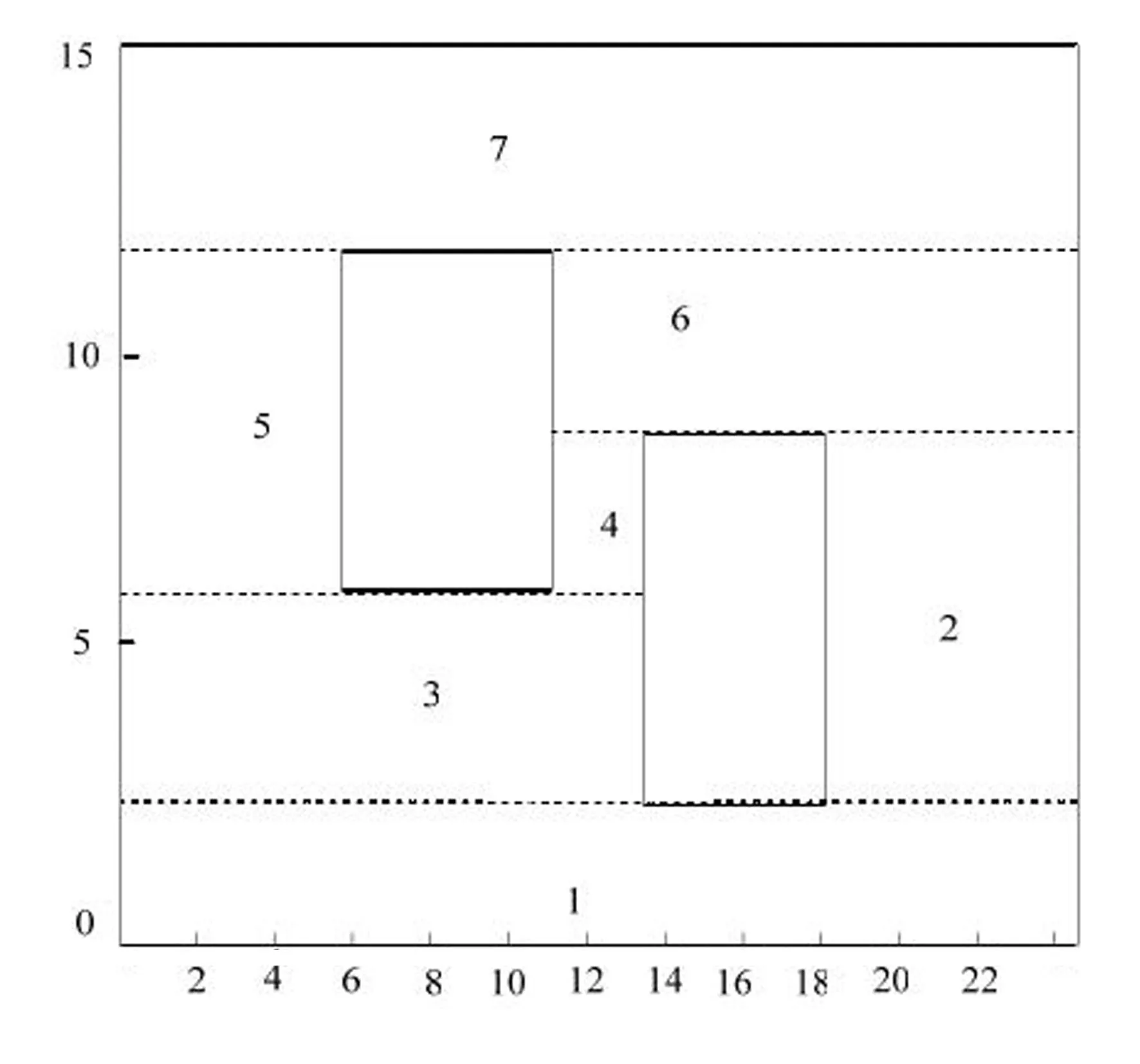
图9 子区划分结果

图10 基于子区域的覆盖实验结果
通过遗传算法得到了最佳的折返路径,为了验证该算法的可靠性,对3种不同的计算方法进行了对比,对比结果如表1所示。

表1 全覆盖性能表
基于子区域覆盖法不仅在转弯次数上大大减少,而且在路径重复率和总长度方面也优于内螺旋法和全区域折返方法,对播种时间进行统计计算,得到了如表2所示的计算结果表。
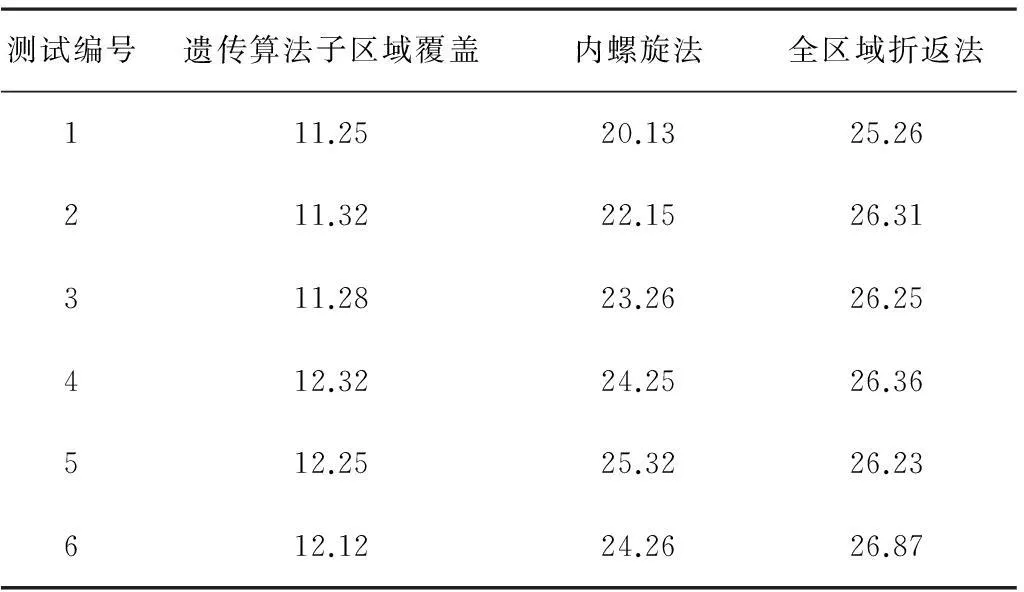
表2 播种时间测试
为了对比不同算法的播种时间,对不同方法的路径规划时间进行了对比,得到了6组播种时间结果。由播种时间测试结果可以看出:使用遗传算法子区域覆盖用时最短,最短时间仅为11.25min,仅为其他算法时间的1/2,路径划分效率较高,从而验证了该算法的可靠性;在精密播种机的路径规划系统中使用,可提高播种机的智能化水平。
4结论
1)依据子区域全覆盖路径搜索方法,设计了一种新的播种机路径规划系统,并使用人工势场和遗传算法对算法进行优化,提高了算法的计算精度和计算效率,实现了播种区域的全覆盖。
2)为了验证子区域全覆盖路径规划方法的有效性和可靠性,将该方法应用到了播种机的路径规划系统中,并对播种机的性能进行了测试。通过测试发现:该方法可以有效地躲避障碍物,并且可以实现播种区域的全覆盖,提高了播种对复杂地块的自适应能力。通过对不同算法的对比测试发现:本设计算法可以有效地降低路径规划时间,提高路径规划效率,路径规划效果较好、覆盖面积大、转弯次数少、实用性较高,可以在精密播种机的路径规划系统中使用。
参考文献:
[1]秦国成,秦贵,张艳红.设施农业装备技术现状及发展趋势[J].农机化研究,2012,34(3):81-82.
[2]张宁,廖庆喜.我国小粒径种子播种技术与装备的应用与研究进展[J].中国农机化,2012(1):93-96,103.
[3]郝金魁,张西群,齐新,等.工厂化育苗技术现状与发展对策[J].江苏农业科学,2012,40(1):349-351.
[4]秦国成,秦贵,张艳红.设施农业装备技术现状及发展趋势[J].农机化研究,2012,34(3):81-82.
[5]冯秀军,杨立东.2BDY-8型2垄密型高速气吹式精密播种机简析[J].农业机械,2007(8):85-86.
[6]王建军,武秋俊.机器人在农业中的应用[J].农机化研究,2007(7):174-176.
[7]郝冬,刘斌.基于模糊逻辑行为融合路径规划方法[J].计算机工程设计,2009,30(3):60-63.
[8]王建军,武秋俊.机器人在农业中的应用[J].农机化研究,2007(7):174-176.
[9]胡斌,董春旺.气吸式穴盘精量播种机吸嘴吸附性能的试验研究[J].石河子大学学报,2009,27(1): 100- 103.
[10]何菊,吴建民.畦作沟灌起垄播种机的研究与设计[D].兰州:甘肃农业大学,2007:17-19.
[11]董丽梅.山地播种机的研究与设计[D].兰州:甘肃农业大学,2009:19-21.
[12]徐云峰.小型免耕播种机的设计及试验研究[D].北京:中国农业大学,2005:22-24.
[13]高焕文,李问盈,李洪文.中国特色保护性耕作技术[J].农业工程学报,2003,19(3):1-4.
[14]王晋生,王桂英.机械化播种实践[J].农业技术与装备,2009(9):21-22.
[15]刘蕴贤,倪道明,李从华,等.不同施肥方法对水稻生长及稻田周围水体污染的影响[J].天津农业科学,2007,13(1):31-34.
[16]吴子岳,高焕文,张晋国.玉米秸秆切断速度和切断功耗的试验研究[J].农业机械学报,2002,32(2):38-41.
[17]何伟,陈彬,张玲.DSP/BIOS在基于DM642的视频图像处理中的应用[J].信息与电子工程,2006,4(1):60-62.
[18]韦艳,陈华根.GPS定位显示中的坐标转换[J].海洋绘,2010,30(3):16-19.
[19]郝冬,刘斌.基于模糊逻辑行为融合路径规划方法[J].计算机工程设计,2009,30(3):60-63.
[20]王建军,武秋俊.机器人在农业中的应用[J].农机化研究,2007(7):174-176.
[21]王俭,赵鹤鸣,陈卫东.基于子区域的机器人全覆盖路径规划的环境建模[J].苏州科技学院学报:工程技术版,2004,17(1):72-75.
[22]张宁,廖庆喜.我国小粒径种子播种技术与装备的应用与研究进展[J].中国农机化,2012(1):93-96,103.
[23]郝金魁,张西群,齐新,等.工厂化育苗技术现状与发展对策[J].江苏农业科学,2012,40(1):349-351.
[24]罗昕,胡斌,黄力烁.气吸式穴盘育苗精量播种机的设计与试验[J].农机化研究,2010,32(11):130-132,140.
[25]夏红梅,李志伟,甄文斌.气力板式蔬菜排种器设计与试验[J].农业机械学报,2010,41(6):56-60.
Path Planning Design of Seeding Machine Based on Artificial Force Field and Genetic Algorithm
Ma Jihong
(Henan Polytechnic University, Zhengzhou 451400, China)
Abstract:In order to improve the adaptive ability of the planter of complex block, enhance the sowing efficiency of planter seeding accuracy, it put forward suitable for precision seeding machine in sub regional exhumation of full area coverage path planning method based on the seeder row fertilizer.The seed metering device was improved so as to adapt to the need of automatic path planning. In order to optimize the path search method based on sub region, the artificial potential field and genetic algorithm are used to optimize the optimization method, which improves the efficiency of the algorithm.For the validity and reliability of the test method, path planning system is installed in the planting machinery. Through the seeding test, the method realized complex plots sown with the full area coverage and obstacle avoidance. On the three different algorithms for comparison tests,it was found that optimization effect is the best for its large coverage area based on genetic algorithm of sub regional model for path planning, turning times less, fewer, the shortest time only 11.25min, only for 1/2 of the other algorithm, path division of higher efficiency and meet the intelligent demand of precision seeding machine, which can be used in path planning system in precision seeder.
Key words:artificial power field; precision seeding machine; genetic algorithm; path planning; coverage area
文章编号:1003-188X(2016)07-0197-05
中图分类号:S223.2;TP242
文献标识码:A
作者简介:马继红(1981-),女,河南濮阳人,讲师,硕士,(E-mail)majihong1981@yeah.net。
基金项目:河南省科技厅资助项目(142102310518);河南省高等学校重点科研项目(15B520008)
收稿日期:2015-07-02
猜你喜欢
小猕猴学习画刊·下半月(2021年3期)2021-05-20
人民长江(2019年3期)2019-10-20
中央民族大学学报(自然科学版)(2017年1期)2017-06-11
统计与决策(2017年2期)2017-03-20
电子技术与软件工程(2016年20期)2016-12-21
科技视界(2016年26期)2016-12-17
电脑知识与技术(2016年26期)2016-11-25
科技视界(2016年20期)2016-09-29
现代计算机(2016年34期)2016-02-28
智能系统学报(2015年4期)2015-12-27
