
指盘式搂草机的设计与试验研究
2016-03-23 08:11:43李凤鸣翟改霞王全喜
农机化研究 2016年7期
李凤鸣,马 赛,张 平,翟改霞,贺 刚,王全喜
(中国农业机械化科学研究院 呼和浩特分院,呼和浩特 010020)
指盘式搂草机的设计与试验研究
李凤鸣,马赛,张平,翟改霞,贺刚,王全喜
(中国农业机械化科学研究院 呼和浩特分院,呼和浩特010020)
摘要:针对目前我国传统搂草设备存在的干燥速度慢、散草打捆困难和草根容易捂烂等问题,研制出适应市场需求的新型指盘式搂草机,能够实现对苜蓿、稻、麦、秸秆的搂集和翻晒作业。为此,论述了9LZ-6.0型指盘式搂草机的整机结构和工作原理,完成了可调旋转架、指盘收放机构和指盘弹齿等关键部件的结构参数设计计算,完成了对弹齿的有限元分析和运动学模拟仿真,并对样机进行了田间试验,通过试验结果与技术指标的分析对样机进行了优化设计。试验结果表明:该机具各项技术性能指标均能满足设计要求,操作方便,使用可靠,搂草质量好,生产率高,可满足我国饲草收获的要求。
关键词:指盘式搂草机;弹齿;有限元分析;运动仿真
0引言
草地生态畜牧业以草产业为基础,具有很高的生态效益和经济效益。我国是草原资源大国,拥有各类草原近4亿hm2,约占国土面积的2/5[1]。丰富的草原资源为我国草业发展提供了坚实的物质基础和广阔的发展空间,维护生态安全,建设美丽中国,既是我国发展的基本国策,也是时代赋予草业界的崇高使命[2]。饲草生产机械作为草业产业化的重要载体和手段,在草产业建设中具有十分重要的位置。大量的牧草由于缺乏收获机械,或收获机械效率不高而不能被有效利用,严重阻碍了我国草产业和畜牧业的发展[3]。据测算,在提高生产率方面,牧草机械化收获比人工收获提高约25~50倍,作业成本低40%~60%,牧草的营养损失减少约为68%~80%;而且,机械化收获在高效利用草原方面能够起到很好的作用。
搂草机的作用是将割后铺放在田间的散草搂集成草条,以适应后续作业的需要。搂草机农业技术要求:①搂草作业损失率应不大于3%。②形成的草条应连续、均匀、松散、外形整齐。每米草条质量应满足后续作业的要求。③形成草条后饲草应清洁,尽量减少陈草、泥土等混杂物。④作业过程中饲草的移动距要小,对草的作用柔和[4]。指盘式搂草机,按挂接方式分为牵引式和悬挂式;按有无动力驱动分为随动型和驱动型。随动型指盘搂草机不需要动力传动系统,结构简单、造价低、维护保养方便、通用性较强,因而推广使用较多,本文研究的即是随动型搂草机。搂草的作业速度一般为8~15m/h,翻草作业速度可稍高于搂草作业。搂草时草的移动距离短,花叶破碎损失小。
1总体方案和工作原理
1.1整机结构
该指盘式搂草机主要由横梁、牵引梁、可调旋转架、摊晒盘提升器、指盘及支架、摊晒盘及支架、L型架体、油缸、连杆机构、行走轮和支腿等组成,如图1所示[5]。

1.横梁 2.摊晒盘提升器 3.可调旋转架 4.L形架体
该机为指盘式结构,整机中指盘数量为左右搂集指盘各4个,中间摊晒指盘1个。该搂草机总体方案为牵引梁安装在与横梁长度方向垂直的对称中心面上,背面安装摊晒盘提升器,横梁两端分别安装1套行走轮装置,形成三点着地;左右可调旋转架对称地安装在牵引梁两侧,左右各4个指盘以及支架通过L形架体与左右可调旋转架插接固定。摊晒盘及支架安装在摊晒盘提升器上,通过弹簧和链环与提升器上端立柱挂接。整体工作时,放下与提起指盘均是通过中间的一个单作用油缸配合连杆机构实现。为防止田间地面不平、机器在工作过程中的颠簸,在左右可调旋转架上专门设置有供缓冲仿形减震的拉力弹簧机构。为拆装方便,指盘及支架及L形架体设计全部采用插接后销子固定。
1.2主要技术参数
9LZ-6.0型指盘式搂草机主要技术参数如下:
配套动力/kW:≥25.8
长×宽×高/m:4.5×5.8×1.7
搂幅/m:≤6.0(可调)
整机质量/kg:540
作业速度/km·h-1:8~15
生产率/hm2·h-1:5.3~6.6
转子数/个:9
每转子弹齿数/根:40
漏搂率/%:≤2
1.3工作原理
指盘式搂草机在田间作业时由25.8kW以上拖拉机牵引作业,机器悬挂在拖拉机正后方,如图2所示。在运输状态时,两侧指盘处于升起位置,到达田间后,拖拉机驾驶员在驾驶室操作液压阀门促使油缸缩回,带动连杆机构及两侧旋转架落下,从而使两侧指盘下落至工作状态。工作时,靠近最前端的指盘最先接触到牧草,各指盘弹齿以拖拉机前进的动力为动力,使各指盘的弹齿与地面及草铺摩擦带动指盘被动旋转,起到搂集和翻晒牧草的作用。前一个指盘将搂集到的牧草传递到下一指盘,以此类推,最终一次搂集两铺牧草为一铺,以集中牧草而利于后续打捆机打捆,并提高打捆效率。指盘作业时,不但把草铺下面的草翻到上面,而且使草铺的草离开原来的位置,移到两草铺中间的空地上。这样一方面使草铺下面的草尽快晒干,另一方面可使草铺下面的草根不致捂烂。整机的搂集宽度、对地压力及搂集角度等通过液压油缸和左右旋转架来进行调节。

图2 9LZ-6.0型指盘式搂草机
2关键部件设计
2.1可调旋转架
旋转架(见图3)是搂草机的核心工作部件,其质量好坏直接关系到搂草机工作效率的高低,而生产率是搂草机主要性能指标。同时,整机的搂集宽度、对地压力及搂集角度等主要通过液压油缸和左右旋转架来进行调节。旋转架是焊接件,零部件较多且相对角度和位置复杂,尺寸公差和形位公差精度高,尤其是零件的焊接角度,采用普通工装很难满足设计角度要求[6]。该旋转架内部还设有减震机构、宽度调节器和对地压力调节器等,这些机构的协同工作能够很好地完成设备的搂集任务。所以,根据设计要求以及中国农业机械化科学研究院呼和浩特分院中试生产基地的实际情况,特制作了专门的工装夹具,以保证焊接的角度和精度。

1.指盘安装管 2.宽度调节器 3.旋转架放置板 4.旋转轴
如图3所示:实线显示部分为可调旋转架的运输位置,也即是搂草机指盘收回的状态;虚线显示部分为可调旋转架的工作位置,即是搂草机指盘放下的状态。从搂草机运输位置变换到工作位置时,指盘以及旋转架需要绕轴旋转65°。当旋转架处于工作状态时,通过调节宽度调节架和宽度调节器,可以调节搂集指盘支架之间的角度,从而调节搂草机的搂幅宽度和搂集后草条的宽度。宽度调节架上设有3个连接孔,对地压力调节器上也设有3个连接孔,通过连接孔位的变换可以调整指盘的离地高度。对地压力调节器内部设置有拉伸弹簧,搂草机工作时,考虑到地面颠簸不平,对地压力调节器可以很好地起到仿形的作用。
2.2指盘弹齿设计
2.2.1弹齿运动轨迹
如图4所示,指盘Ⅰ的弹齿A的绝对运动轨迹为ac,指盘I上所有弹齿的轨迹将形成一曲面。指盘Ⅱ的弹齿B的绝对运动轨迹为bf,指盘Ⅱ上所有弹齿的轨迹也形成一曲面。指盘Ⅰ的弹齿将牧草沿ε角方向拨动一距离后,由指盘Ⅱ的另一弹齿继续拨动。M1m为指盘Ⅰ所有弹齿开始拨动牧草的线,N1n为其拨动终了线。同样E1e为指盘Ⅱ所有弹齿的开始拨动线,K1k为其拨动终了线。为了不产生漏搂,最低限度E1e线必须与N1n线相重合[7]。

图4 指盘式搂草机的搂草过程
2.2.2弹齿主要参数
2.2.2.1弹齿运动轨迹交线高度h
根据图4所示及其运动轨迹的分析,为了不产生漏搂,指盘Ⅰ和指盘Ⅱ所有弹齿端部的轨迹构成的曲面之交线离地高度h,不应超过搂草机作业之前的割草机的割茬高度,一般取h=40~60mm。根据实际作业情况,该搂草机的轨迹交线高度选择h=55mm。
2.2.2.2弹齿拨草角φ
弹齿拨草角即弹齿开始拨草到拨草终了的弹齿转动角度,它与交线高度h、指盘半径R的关系为
φ=2arccos(1-h/R)≈46°
(1)
2.2.2.3弹齿间角β
弹齿间角为两相邻弹齿端部与指盘中心连线所夹的角。为了防止漏搂,β角不能过大;同时,为了更好地工作,β角与弹齿拨草角的关系为
β=φ/m
(2)
其中,m取值为任一整数;β一般取7°~9°,该机选择β=9°。
2.2.2.4搂草时弹齿端部的绝对速度νa
指盘式搂草机弹齿端部的绝对速度为
(3)
式中νj—机器前进速度(m/s);
α—搂草时指盘的方向角(°);
λ—取0.57~0.71,该处取λ=0.65;
经计算后得弹齿端部的绝对速度νa≈15.12km/h=4.2m/s。
2.3指盘收放连杆机构
指盘收放机构是该搂草机的关键部件,机构的收和放控制着整个搂草机全套指盘的升起与降落,其最终目的是控制整个搂草机运输和工作状态的转换。机构主要由6根连杆和1个液压油缸及左右可调旋转架组成:油缸为单作用油缸,进油口与拖拉机的液压输出口连接,控制油缸活塞杆的伸缩,进而带动连杆工作来达到控制指盘起降的目的。指盘收放连杆机构可以简化为如图5所示的平面8连杆机构,油缸的作用简化为一端固定、一端移动的结构,将左右可调旋转架也简化为了两个绕b点转动的连杆。

图5 连杆机构简化图
图5中,a、b、c处均为固定的铰接转动副,d、e、f、g处均为可移动的转动副,h处为上下运动的移动副,同时在h处铰接的连杆1和连杆6可以相对转动。在整个机构中,驱动力来自移动副h,h向上移动,带动1~6各连杆工作,最终使连杆7、8(左右可调旋转架)向上转动,从而实现指盘系统的起升,达到整个搂草机由工作状态转换为运输状态的目的。
3弹齿的有限元分析
利用常用的ANSYS分析软件对弹齿进行有限元分析,将SolidWorks中已经建立的三维实体模型通过与ANSYS的接口,导入ANSYS软件中[8],采用整体网格法对弹齿模型进行网格划分。
指盘在工作状态下,弹齿端部与地面接触,在指盘所在平面内,弹齿除受自身重力外,还受与地面接触的压力、固定圈定位孔处的压力及指盘部分重力。对弹齿施加载荷、选取受力面、选择载荷类型,进行力学分析后得到弹齿的应力、应变及变形量图谱。弹齿的变形量分布如图6所示。

图6 弹齿变形量分布图
弹齿最大变形发生在弹齿与地面接触的指尖区域,最大变形值为54.7mm。
从弹齿的有限元分析结果可以看出:弹齿与地面接触的部分变形较大,在折弯处应力集中明显。对于弹齿的应力、应变和变形情况,对弹齿结构进行了进一步优化设计:一方面,在不影响指盘正常工作情况下,将弹齿材料直径进行了适当加大,且适当增大了弹齿折弯处折弯角和折弯半径;一方面,从弹齿制造工艺角度考虑,该弹齿现选用的材料为60Si2MnB,经过高温回火后得到良好的综合力学性能,使得弹齿极具柔韧性,不易折断,延长了使用寿命[9]。
4弹齿运动轨迹仿真
该机共有8个搂集草条的指盘,每个指盘都同样地安装有40根弹齿,每根弹齿的运动轨迹都完全相同。所以,只对1个指盘上的1个弹齿做运动轨迹模拟仿真。利用ADAMS运动学仿真软件,将由SolidWorks中导出的Parasolid格式的指盘虚拟模型导入到软件中,拾取虚拟模型的质量特性,建立完整的用于模拟仿真的模型数据[10-11],对各个零件添加各约束副,施加驱动,使各零件在仿真时能够相互关联的运动。
由于机具在给定的作业速度下工作时指轮盘弹齿端部的绝对运动速度会影响牧草的花叶损失率,因此对指盘的运动进行运动学仿真,分析弹齿端部的绝对速度,从而验证机具作业速度的选择是否合理。为了保证不形成漏搂,并考虑工作草地的平整度,根据经验及该机性能,选择机器前进速度为14km/h(3.9m/s)。仿真后的弹齿端部运动轨迹及弹齿端部绝对速度曲线如图7、图8所示。

图7 弹齿端部运动轨迹

图8 弹齿端部绝对速度曲线
查阅农业机械设计手册相关内容得知:在相同的机器前进速度下,弹齿端部的绝对速度愈小,则弹齿对牧草的作用愈柔和,可减少花叶的碎落。一般要求弹齿端部绝对速度νa≤4.5m/s。以上仿真结果显示:弹齿端点运动轨迹呈余弦曲线,绝对速度平均值约为4.2m/s,满足设计要求,这也和之前通过设计计算公式得到的数据相吻合。由此可知:该机具作业时弹齿端部绝对速度符合技术要求,机具作业的前进速度选择合理。
5田间试验及结果分析
5.1试验条件及方法
试验场地点为内蒙古思远牧业有限责任公司(伊利第七牧场)。该草场为人工种植草场,草场地势平坦,土壤类型为盐碱土,牧草品种为紫花苜蓿,种植面积大约230hm2。收获时处于初花期-盛花期,苜蓿草长势好,割后苜蓿平均植株长度约0.65m。搂条前的作业工序为:先用切割压扁机把苜蓿切割后铺放成草条。
试验前对9LZ-6.0型指盘式搂草机的完整性和外观进行了检查,结果符合图纸设计要求;进行了调试和试运转作业,并将搂草机调整到最佳状态,整机工作状态良好。试验中使用的各种仪器、仪表、量具有转速表、秒表、电子称、卷尺等,全部在标定有效期内。本次试验条件符合《GB/T14247—1993搂草机 试验方法》和《JB7766.1—1999指轮式搂草机技术条件》的要求。
5.2试验结果分析
试验中,对该机的各项技术参数、现场试验条件等进行了测量监测,并依据试验方法和技术条件的要求对机具的各项性能指标进行了测定。技术参数各项测定数值均在设计值范围内,测定的相对湿度约为59%,土壤含水率平均为21.2%,土壤坚实度平均为155.7kPa,牧草花叶的叶草比平均为45.8%,均符合现场试验条件。
机具的各项性能指标均在正常工作条件下进行,机具的前进速度选在10~14km/h,配套动力选用现有的约翰迪尔654拖拉机。试验中分别对机具的搂幅、漏搂率、生产率,以及动力指标和经济指标进行了测定。根据测定结果和试验方法中的公式计算后取平均值,搂幅约为5.82m,漏搂率约为1.0%,生产率约为5.8hm2/h,各项动力指标和技术经济指标均满足设计要求。搂幅及漏搂率的测定如表1和表2所示。
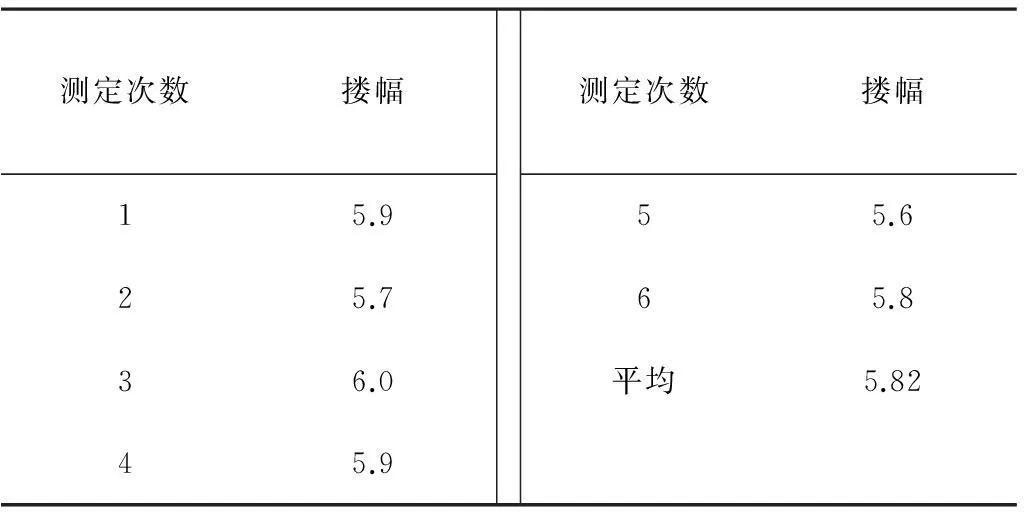
表1 搂幅测定表

表2 漏搂率测定表
通过对9LZ-6.0型指盘式搂草机进行的田间性能、生产试验测定结果表明:
1)该机运行稳定,装配合理,空车试运转正常,运转平稳、没有较大震动,没有异样噪声,安全防护得当;
2)易于制造,生产成本低;
3)该机是牵引式机具,配套动力适应性广,操作技术要求不高,调整保养方便;
4)该机使用可靠,维修方便,试验期间无重大故障;
5)漏搂率较低,生产效率较高。
6结论
1)该搂草机不需要动力传动系统,结构简单、造价低、维护保养方便,推广使用较多。
2)复杂的可调旋转架结构及内部的减震机构、宽度调节器和对地压力调节器等机构的协同工作能够很好地完成设备的搂集任务。
3)用于指盘系统收放的连杆机构简单实用,能够很好实现指盘系统的起升,达到整个搂草机由工作状态转换为运输状态的目的。
4)田间试验表明:该机可完成搂草、合并草条、翻晒草条等多项工作,作业质量良好,形成的草条蓬松、均匀、连续,便于晾晒,草质纯洁,也便于后续机具作业。所以,该机具是简单实用、性价比较高、在牧草生产中不可或缺的收获机具之一。
7建议
1)在试验过程中,发现行走轮与指盘支架有摩擦现象,所以将行走轮更换为规格更小并符合图纸和整机要求的轮胎。
2)左右旋转架拉杆连接管旋转调整不方便,拟在上面加工适合标准扳手操作的平面。
3)选配的液压油缸存在漏油现象。由于该机具油缸是关键部件,所以下一步要选配其他厂家的优质油缸。
4)优化可调旋转架结构,优化各零件间的角度和位置。
5)进一步优化弹齿的结构,使得弹齿的应力应变及变形量更加符合材料使用的最优性能,从而改善改善系统性能。
6)液压系统相对简单,在后续的研究中将进一步优化设计,使设备更多的动作和功能通过液压来控制,减少人工干预。
参考文献:
[1]杨明韶,杜健民.草业工程机械学[M].北京:中国农业大学出版社,2013:137-162.
[2]中国农业机械化科学研究院.国内外畜牧机械化发展趋势[J].农机科技推广,2003(6):4-6.
[3]杨明韶.中国牧草机械发展简史[J].农业机械学报,1991(3):35-38.
[4]杨世昆,苏正范.饲草生产机械与设备[M].北京:中国农业出版社,2009:196-211.
[5]中国农业机械化科学研究院呼和浩特分院.一种牵引式指盘搂草机:ZL201120458904.0[P].2011-11-03.
[6]邓文英.金属工艺学[M].北京:高等教育出版社,2000:128-134.
[7]中国农业机械化科学研究院.农业机械设计手册[K].北京:中国农业科学技术出版社,2007:1155-1157.
[8]叶先磊,史亚杰.ANSYS工程分析软件应用实例[M].北京:清华大学出版社,2004.
[9]于永泗,齐民.机械工程材料[M].大连:大连理工大学出版社,2003:4-12.
[10]赵武云,刘艳妍,吴建民,等.ADAMS基础与应用实例教程[M].北京:清华大学出版社,2012:202.
[11]陈峰华.ADAMS 2012虚拟样机技术从入门到精通[M].北京:清华大学出版社,2013. 135-16.
Design and Experiment of Finger-wheel Rake
Li Fengming, Ma Sai, Zhang Ping, Zhai Gaixia, He Gang, Wang Quanxi
(Hohhot Branch of Chinese Academy of Agricultural Mechanical Sciences,Hohhot 010020,China)
Abstract:Aiming at the problems such as the low drying speed, baling difficulties of scatter hay and grass-roots rotten,a new type of finger-wheel rake was developed to meet with the market demands and meet with the demands of the forage harvest in our country.It can rake and ted the alfalfa and rice or wheat straw.The overall structure and working principle were described briefly.The major working components such as the structure parameters of the adjustable rotation frame,the extending-retracting mechanism of finger wheel and the spring tooth were designed.And finite element analysis on spring tooth and the kinematics simulation on the finger-wheel was carried out.Through the analysis of performance test results and the technical index of the prototype,it was optimized.The test results showed that all technical indexes of the machine meet the design requirements.It is easy to operate and can be used reliability. While operating, it had good raking effect and high working productivity.The machine can satisfy with the harvesting requirements of forage grass.
Key words:finger-wheel rake;spring tooth;finite element analysis;kinematic simulation
文章编号:1003-188X(2016)07-0176-06
中图分类号:S225.8
文献标识码:A
作者简介:李凤鸣(1986-),男,内蒙古丰镇人,工程师,硕士,(E-mail)lifeman_ok@126.com。
基金项目:内蒙古自治区创新方法应用推广与示范项目(2013IM020800)
收稿日期:2015-07-06
猜你喜欢
林业机械与木工设备(2022年2期)2022-03-08 01:32:22
农业机械学报(2020年10期)2020-10-29 11:19:34
机械工程师(2020年3期)2020-03-27 06:33:36
农机化研究(2017年4期)2017-12-16 02:48:38
中国科技博览(2016年25期)2016-12-20 19:50:49
汽车科技(2016年6期)2016-12-19 20:32:56
东方教育(2016年3期)2016-12-14 13:03:34
文艺生活·中旬刊(2016年11期)2016-12-13 00:13:02
航空兵器(2016年4期)2016-11-28 21:54:01
科学与财富(2016年15期)2016-11-24 13:44:43
