
基于移动4G的株距自适应玉米收割机优化设计
2016-03-23 08:11寇雪梅杨静宜崔建弘汪小志
农机化研究 2016年7期
寇雪梅,杨静宜,崔建弘,汪小志
(1.河北工程技术学院,石家庄 050091;2.南昌工学院,南昌 330108;3.武汉理工大学,武汉 430070)
基于移动4G的株距自适应玉米收割机优化设计
寇雪梅1,杨静宜1,崔建弘1,汪小志2,3
(1.河北工程技术学院,石家庄050091;2.南昌工学院,南昌330108;3.武汉理工大学,武汉430070)
摘要:为了提高玉米收割机的株距的自适应能力、降低漏采率、提升工作效率,设计了一种新的株距自适应玉米收割机,大大提高了玉米收割机的作业精度和效率。依据移动4G信号的传播特性,设计了玉米株距实时测量系统,针对中国4G现场测试环境,研究提出了一种电波传播特性测量与建模方法,结合高性能测试仪器和虚拟仪器技术设计构建了3.5GHz测量系统。测量得到的株距量由A/D转换器转换为数字信号,再由单片机进行处理,对执行末端发出指令,调整玉米收割机割台分禾器的间距,从而可以对不同株距的玉米进行收割作业。对设计的玉米收割机进行测试发现:其株距自适应能力较好,可以随株距的变化自动调整分禾器间距,玉米穗的漏采率和破碎率较低,符合高精度作业玉米收割机的设计要求,为玉米自动化收割机械装置的研究提供了较有价值的参考。
关键词:玉米收割机;移动4G;株距测量;单片机;分禾器;自适应
0引言
我国玉米种植历史悠久、种植面积广泛,且是我国三大主要粮食作物之一,主要产区分布在东北、华北和西北等地区,在我国粮食生产和经济发展过程中起到非常重要的作用。但是,随着种植面积的增加,加上玉米收割难度大,玉米的种、管和收等都面临很多问题。近年来,在国家实施强农惠农政策支持及联合收割机购置补贴的拉动下,联合收获机的研究日益成为人们关注的问题。在玉米收割过程中,由于株距的不同,玉米秸秆的收割位置有所不同,如果不调整分禾装置的位置,很容易造成玉米的漏采或者割台的阻塞。为此,利用4G间距测量系统,设计了株距自适应的调节的分禾系统,提高了玉米收割机的作业精度和生产效率,对于收割机的优化设计具有重要意义。
1株距自适应玉米收割机总体优化设计
由于玉米播种的机械化程度低,人工点播行距不均,宽行达到800mm,窄行一般为400mm,这就要求收获机对行距的适应性要好。
1.1株距自适应总体设计
在配置两对摘辊中心距时,考虑中间情况定位800mm,然后在分禾器、摘辊前端的秸秆引导装置上采取一定的措施,提高机组的行距适应能力,其总体设计如图1所示。

图1 玉米收割机株距自适应调节过程
图1中,株距的测量使用4G测量系统,并利用PC单片机实现A/D和D/A转换功能,最后将间距调整信号发送给液压传感器,实现分禾器间距的自适应调节。
1.2机组生产率
玉米收割机的机组生成效率可表示为
Q=2×5.4ηBV
(1)
其中,η表示机组工作时间利用系数,一般为0.7~0.9;B表示行距;V表示机组作业速度。

表1 收割机各挡速度
表1表示收割机各个挡的速度。根据各个挡位的速度,可以在不同地块选择不同的挡位,从而调节收割的速度,来实现收割机的优化设计,提高作业效率。
1.3留茬高度
留茬高度是指秸秆粉碎还田机构粉碎秸秆时所留根茬高度。秸秆粉碎还田机构工作时,因为粉碎机的转速比较高,刀片不能进入土中作业,因此需要利用支撑轮的高度来限制留茬高度。为了使收割机适应不同地块的收割效果,在设计时保持支撑轮的位置可调整,实现留茬高度0~100mm内可调。
1.4割台总体设计
玉米收割机的优化设计主要是割台的优化设计,通过优化达到不同株距玉米收割的自适应调节功能。割台的总体设计如图2所示。

1.分禾器 2.喂入装置 3.摘穗锟 4.第一升运器 5.排茎锟
图2中,主要部分为分禾器和摘穗锟。为了适应不同株距玉米收割的需要,需要对分禾器进行改进,利用4G移动信号进行株距测量,使用液压控制系统和单片机完成分禾器间距的自动调节。
2株距自适应玉米收割机结构和控制系统
为了实现对不同株距的玉米进行收割,需要对分禾器的结构进行改进。在此利用4G测距装置、PC单片机和液压控制系统对分禾器的间距进行调节,系统分布在割台的分禾部分,其收割台的结构如图3所示。
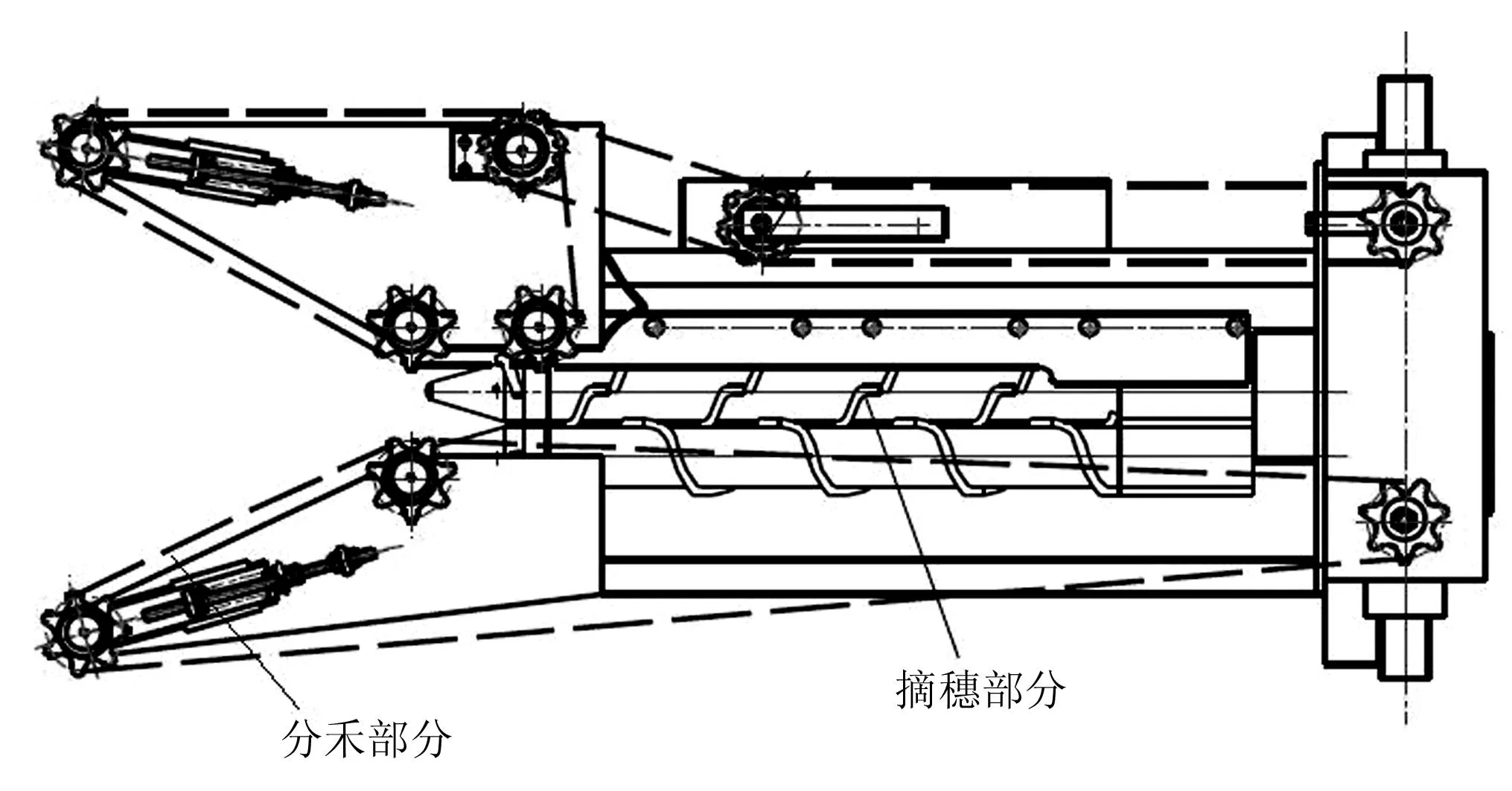
图3 割台单行布局图
图3中,主要分为分禾部分和摘穗部分,株距自适应收割系统安装在分禾部分;而分禾的机械结构主要利用张紧轮进行控制,其结构示意图如图4所示。

图4 割台分禾器张紧链轮部分
工作时,利用PC单片机的D/A转换功能,将不同的株距控制转换为模拟信号对张紧部件进行控制,从而实现分禾器的不同间距调整。
表2表示玉米收割机设计植株参考数据。其中,包括玉米植株高度、玉米茎粗、结穗高度、玉米穗直径和玉米行距。其中,分禾器自适应调整系统的设计主要参考玉米行距,通过设计满足不同行距收割的需要。
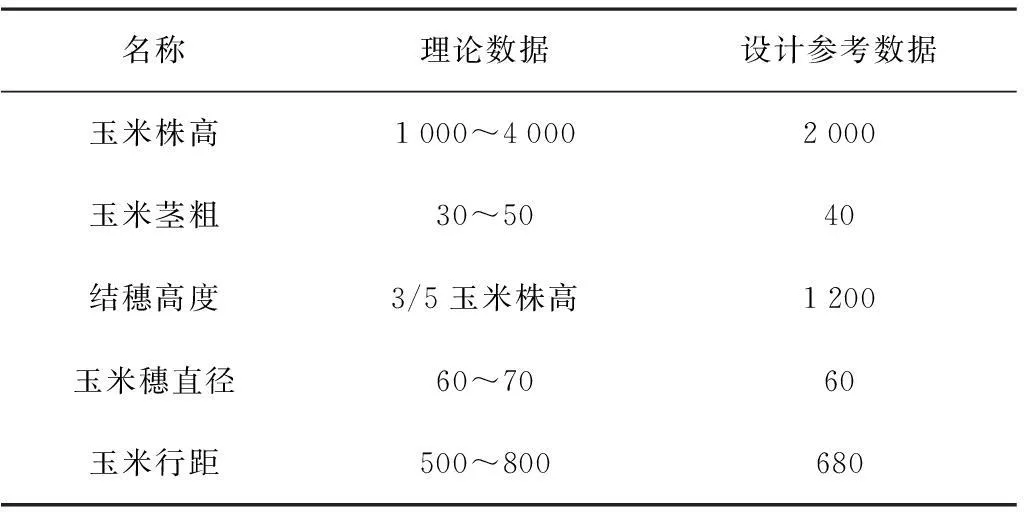
表2 植株参考数据
测量系统包据发射端和接受端,如图5所示。发射端由信号发生器、功率放大器和发射天线组成;接收端由频谱分析仪、控制计算机和GPS接收机系统组成。依据发射端和接收端的GPS地理坐标信息测试结果,接收采样点与基站之间的距离d可以表示为
(2)
其中,接收采样点的坐标为(Xr,Yr),基站坐标为 (Xt,Yt)。在测量过程中,使用虚拟仪器实现自动化采集、采样和存储数据,一般来说路径损耗理论模型可以表示为
PL(d)=A+10nlg(d/d0)+χ
(3)
其中,d0表示参考距离;d表示测量点和基站之间的距离;n表示路径损耗指数;χ表示阴影衰落,符合正态分布;A为自由空间损耗。其表达式为
(4)
其中,λ表示发射信号波长。将式(2)等效为d的一元函数形式,其表达式为
PL(d)=B+10nlgd+χ
(5)
B的表达式为
B=A-10nlgd0
(6)
传播测试模型采用最小二乘法拟合预处理后的测试数据PL(d)和d,对于不同的玉米植株可以分别进行测距,对两次测距结果进行对比可以得到株距的实际值。利用测距系统对分禾器间距进行控制原理如图6所示。
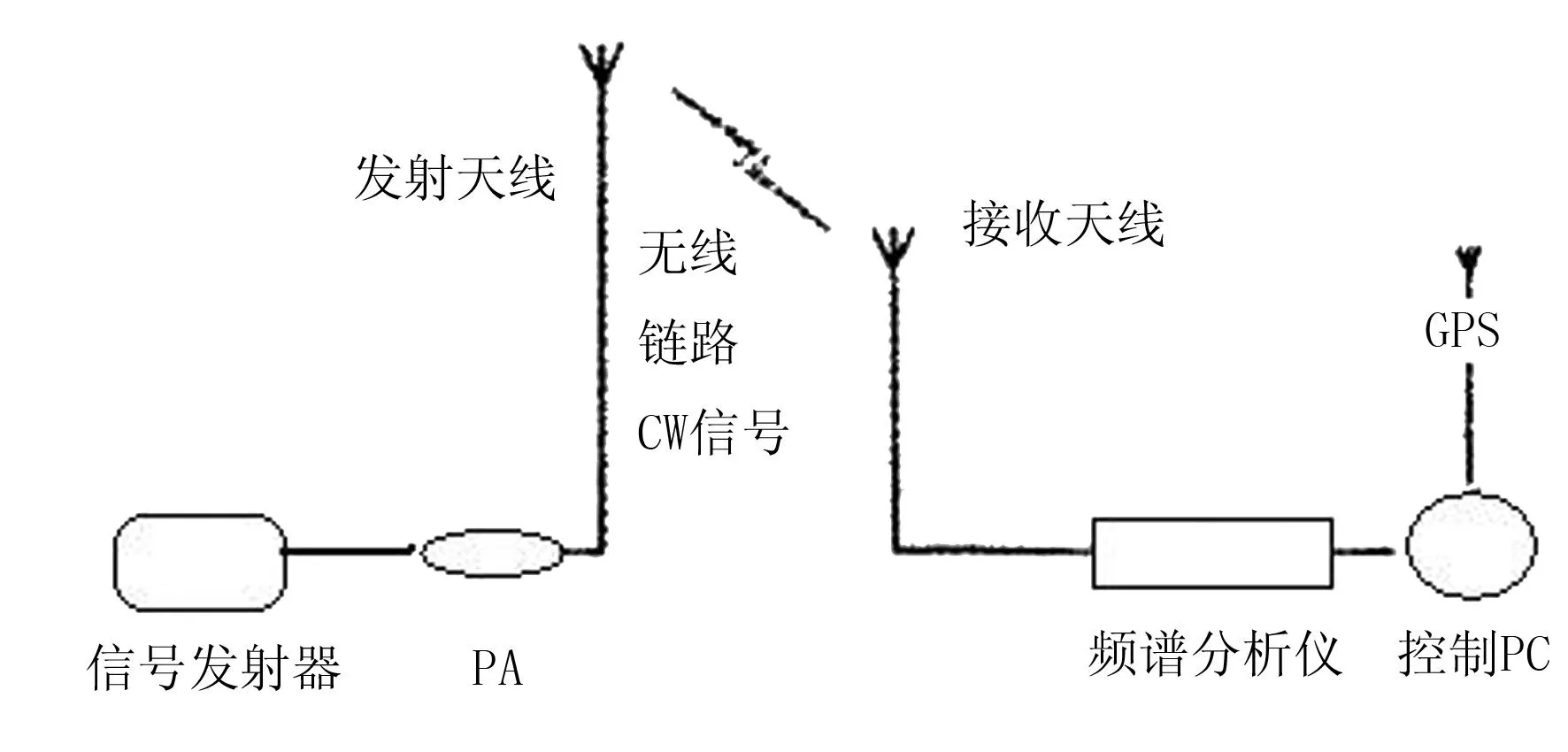
图5 4G测距系统框图

图6 分禾器间距控制原理图
玉米收割机利用3.5GHz测量系统可以实时地测量玉米的株距,利用A/D转换器对模拟进行转换,然后利用PC单片机对数字信号进行处理,再将数字信号利用D/A转换器转换为控制量进行输出;利用变频器对液压控制系统发出信号,控制分禾器不同间距的调节,从而提高收割机不同株距收割的适应能力。
3株距自适应玉米收割机性能测试
为了测试设计的玉米收割机自适应株距的收割效果,在玉米收获机上安装分禾器自适应调整装置后,对玉米联合收割机进行了性能测试。测试项目主要包括分禾器间距调整的响应性能、收割间距随时间变化及漏采率和破碎率等收割性能。测试场景如图7所示。

图7 株距自适应玉米收割机性能测试图
图7中,可收割行数为6行。为了适应不同株距玉米的收割,采用自适应调节式的分禾器,通过测试,得到了如图8所示的分禾器间距响应曲线。
由图8可以看出:利用自适应调整系统后,分和器响应时间短,响应速度快,超调量低,可以满足分禾器间距调整的自适应设计需要。

图8 分禾器间距调整系统响应曲线
图9表示分禾器间距调整数据随时间变化曲线。由图9可以看出:在4G测距的作用下,收割机的分禾器可以实现非线性调节,调节精度高,可以满足高精度玉米收割作业的需求。
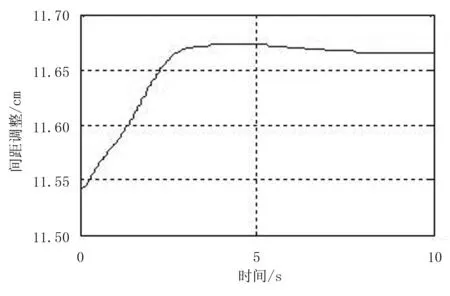
图9 分和器间距调整随时间变化曲线
表3表示株距自适应调节玉米收割机的性能测试结果。由测试结果可以看出:株距自适应玉米收割机除可以自动调整收割株距外,其果穗的漏采率和籽粒破碎都比较低,可以满足高精度采摘作业需求。
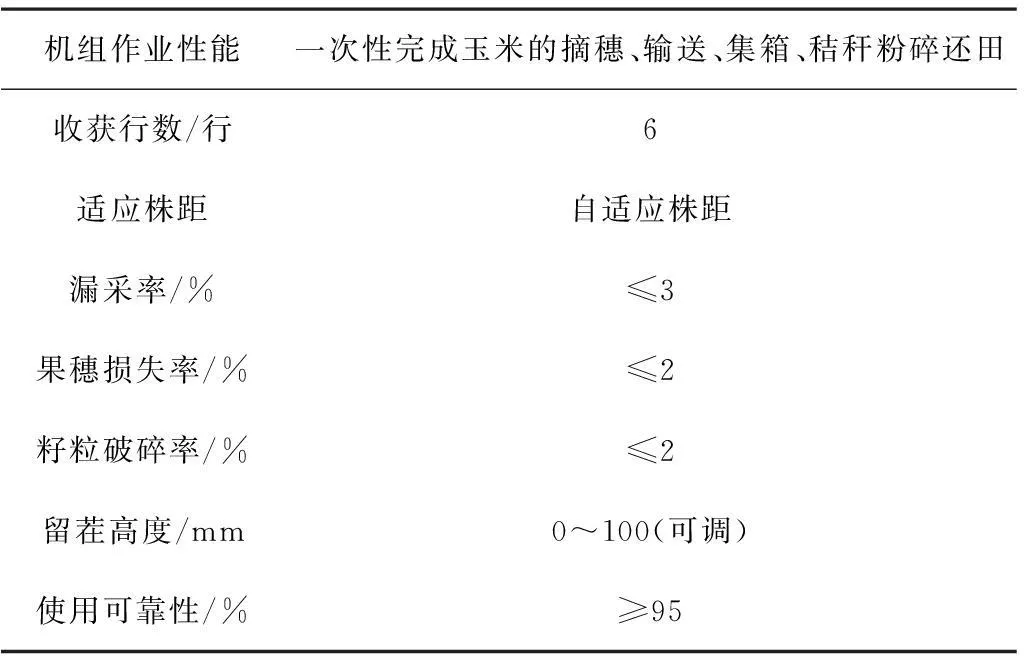
表3 株距自适应玉米收割机性能测试表
4结论
针对玉米种植株距不均匀、收割难度大等问题,设计了一种新的可自适应调整株距的玉米收割机。在收割机上安装了4G株距测量系统,可以实时地测量玉米的株距,并根据株距来调整分禾器的间距,实现不同株距玉米的收割,大大提高了收割效率,降低了漏采率等。对收割机的整体性能进行测试发现:收割机的漏采率低,总体果穗的损失率和破碎率较低,收割性能较好,为玉米联合收割机的研发提供了较有价值的参考。
参考文献:
[1]刘伟,赵春芳,王振强.基于solidworks-simulation对玉米剥皮机剥皮齿的有限元分析[J].农业机械,2011(9):109-111.
[2]王优,张强,于路路.玉米摘穗装置的应用现状与展望[J]. 农机化研究,2011,33(1):228-231.
[3]褚幼晖, 李福欣, 邸志峰.背负式玉米收获机摘穗辊的设计[J].农业装备与车辆工程,2008(8):48-50.
[4]陈松涛,周学建,师清翔,等.玉米收获机摘穗装置运动参数特性研究[J].河南科技大学学报:自然科学版,2007,28(1):64-69.
[5]贺俊林,佟金,陈志,等.指形拨禾链分禾机构的虚拟设计与运动仿真[J].农机机械学报,2007,38(6):53-56.
[6]范国昌,王惠新,籍俊杰,等.影响玉米摘穗过程中籽粒破碎和籽粒损失率的因素分析[J].农业工程学报,2002, 18(4):72-74.
[7]郭玉明,袁红梅,阴妍,等.作物茎秆抗倒伏的力学分析及综合评价探讨[J].农业工程学报,2007, 23(7): 14-18.
[8]郭新宇,赵春江,肖伯祥,等.玉米三维重构及可视化系统的设计与实现[J].农业工程学报,2007, 23(4): 144-148.
[9]宋建农,王苹,魏文军,等.水稻秧苗抗拉力学特性及穴盘拔秧性能的力学试验研究[J].农业工程学报,2003, 19(6): 10-13.
[10]袁红梅,郭玉明,李洪波.小麦茎秆弯折力学性能的试验研究[J].山西农业大学学报:自然科学版,2005, 25(2): 173-176.
[11]李婉, 李尚平, 刘东美.小型整秆甘蔗收获机械喂入机构仿真分析与试验研究[J].农机化研究, 2010, 32(7): 152-154.
[12]Takuyki Y, Katsuaki S, Koki I, et al. Application of a Sugarcane Harvester for Harvesting of Willow Trees Aimed at Short Rotation Forestry: an Experimental CaseStudy in Japan[J]. Croatian Journal of Forest Engineering, 2012, 33(1): 5-14.
[13]宋春华, 区颖刚, 刘庆庭, 等.两段式螺旋扶起机构理论的研究[J].农机化研究,2010,32(11): 34-36.
[14]杜现军,李玉道,颜世涛,等.棉秆力学性能试验[J]. 农业机械学报,2011,42(4):87-91.
[15]宋占华,肖静,张世福,等.曲柄连杆式棉秆切割试验台设计与试验[J].农业机械学报,2011,42(11):162-167.
[16]王锋德,燕晓辉,董世平,等.我国棉花秸秆收获装备及收储运技术路线分析[J].农机化研究,2009,31(12):217-220.
[17]李耀明, 秦同娣, 陈进,等.玉米茎秆往复切割力学特性试验与分析[J].农业工程学报,2011,27(1):160-164.
[18]解福祥, 区颖刚, 刘庆庭.甘蔗收获机组合式扶起装置设计与试验[J].农业机械学报,2011,42(2): 94-97.
[19]赖晓, 李尚平, 秦志文, 等.新型甘蔗收割装置的仿真分析与试验研究[J].农机化研究,2011, 33(2): 102-105.
[20]王健康, 吴明亮, 任述光, 等.往复式切割器传动机构运动动力学分析[J].中国农学通报, 2011, 27(1): 90-194.
[21]李俊峰,介战.联合收割机谷物损失测试研究探讨[J].农机化研究,2007(12):248-250.
[22]梁振伟,李耀明,赵湛,等.切纵流联合收获机夹带损失监测方法[J].农业工程学报,2012,28(增2):179-183.
[23]李耀明,梁振伟,赵湛,等.联合收获机谷物损失实时监测系统研究[J].农业机械学报,2011,42(增1):99-102.
[24]徐立章,李耀明,李洪昌,等.纵轴流脱粒分离-清选试验台设计[J].农业机械学报,2009,40(12):76-79.
[25]贺俊林,佟金,胡伟,等.辊型和作业速度对玉米收获机摘穗性能的影响[J].农业机械学报,2006, 37(3): 46-49.
Optimization Design for Corn Harvester of Adaptive Spacing Based on Mobile 4G
Kou Xuemei1,Yang Jingyi1,Cui Jianhong1,Wang Xiaozhi2,3
(1.Hebei Polytechnic Institute, Shijiazhuang 050091, China; 2.Nanchang Institute of Science & Technology, Nanchang 330108,China;3.Wuhan University of Technology,Wuhan 430070,China)
Abstract:In order to improve the adaptive ability of row spacing in corn harvester, reduce the loss rate, improve work efficiency,it designs a new adaptive spacing in the rows of corn harvester, and it greatly improves the working precision and production efficiency of corn harvester. According to the propagation characteristics of 4G mobile signal,it designs the spacing corn real-time measurement system, for Chinese 4G field test environment.Combined with the high performance testing instrument and virtual instrument technology,the study proposes a method of measurement and modeling of radio propagation characteristics, and it constructs the 3.5GHz measurement system. Amount of spacing measurements it obtains by the A/D converter conversion to digital signals, and then processes by the microcontroller, spacing on end effector issued a directive, the adjustment of corn harvester header divider, which can different spacing in the rows of corn harvesting operations.On the design of the corn harvester was measured, the spacing of adaptive ability is good, which can be change with spacing automatically adjust the divider between.And the corn leakage recovery rate and the broken rate is low, in line with the design requirements of high precision operation,the research offers a more valuable reference for the study of corn automation mechanical harvesting device.
Key words:corn harvester; mobile 4G; distance measurement; MCU; divider; adaptive
文章编号:1003-188X(2016)07-0070-05
中图分类号:S225.5+1
文献标识码:A
作者简介:寇雪梅(1980-),女(满族),河北承德人,副教授。通讯作者:汪小志(1981-),女,武汉人,副教授,博士研究生,(E-mail) wangxiaozhi@ncu.edu.cn。
基金项目:湖北省自然科学基金项目(2014CFB322)
收稿日期:2015-07-06
猜你喜欢
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
电子制作(2018年12期)2018-08-01
电子制作(2017年19期)2017-02-02
中国教育信息化·基础教育(2016年11期)2016-12-27
软件导刊(2016年11期)2016-12-22
科技视界(2016年26期)2016-12-17
科教导刊·电子版(2016年26期)2016-11-21
汽车科技(2016年5期)2016-11-14
