
基于嵌入式云计算平台的采棉机监控系统设计
2016-03-23 08:11张微微杨静宜余良俊
农机化研究 2016年7期
张微微,王 政,杨静宜,余良俊
(1.河北工程技术学院,石家庄 050091;2.中国地质大学 机械与电子信息学院,武汉 430074)
基于嵌入式云计算平台的采棉机监控系统设计
张微微1,王政1,杨静宜1,余良俊2
(1.河北工程技术学院,石家庄050091;2.中国地质大学 机械与电子信息学院,武汉430074)
摘要:为了提高采棉机的自主导航能力,实现采棉机路径规划的在线控制,对采棉机的智能监控系统进行了设计研究,并将多嵌入式平台引入到了智能控制系统中,采用云处理计算方式对多平台节点进行连接,实现了采棉地块视频采集和处理的实时性和智能化。为了验证智能监控系统的可靠性,在棉田对采棉机的智能监控系统进行了实地测试和功能验证。通过测试表明:该监控系统可使采棉机完成路径规划,能够高精度地完成路径在线追踪,其采净率高、落地棉率和含杂率较低,符合大型机械采棉自动化设计的需求。本次研究为云处理技术在嵌入式平台上的应用提供了有效解决方法,对于大型智能机械装备自动化和信息化监控仪器开发具有指导和借鉴意义。
关键词:智能监控;自主导航;路径规划;嵌入式;云计算;采棉机
0引言
近年来,随着智能监控技术的不断发展,在线监控和图像实时处理技术被应用到了农机装备的开发设计过程中,使得大型智能农业机械装备不仅可以实现自动监控,完成工程参数的采集和状态报警,而且可以实现系统的闭环控制和智能维护,实现农机的多信息融合和故障诊断。但目前国内仅有的少数车载监控系统大都基于微型单片机,不仅可靠性与自动化程度低、二次开发困难,且无法完成视频处理和路径规划等大型计算。为此,提出了一种基于云计算的多嵌入式平台开发,对于采棉机智能监控的在线监控和实时路径规划研究具有重要的参考价值。
1采棉机智能监控系统总体设计
云计算平台集成了一个巨大的云数据处理网络,可以提供大量的并行的网络节点间的计算和服务;用户可以利用虚拟化技术对每个服务器进行扩展,并将每个服务器的资源通过云计算平台进行整合,从而提供超级的计算能力和存储能力。通用的云计算体系结构如图1所示。

图1 通用云计算体系结构
云计算体系结构主要部分为计算资源管理系统和服务器集群。其中,计算资源管理系统可有效地调度计算资源;动态地部署、配置、调度和回收资源,服务器集群负责高并发量的用户请求处理、大运算量的计算处理,为了满足大数据存储的需求,使用相关数据分割算法对数据进行处理,使用并行计算的方式上传和下载数据。采棉机的云处理数据平台主要使用在驾驶室,设计采用阶梯式的结构,如图2所示。

图2 智能云处理系统阶梯结构
为了实现智能监控系统的云处理计算功能,采用阶梯式的结构对云处理计算平台进行开发。其中,全局监控服务器负责整合局部监控服务器的信息,局部监控负责监控代理数据的整合,从而完成多嵌入式平台系统数据资源的整合,实现并行计算的数据处理方式。利用云数据处理计算方法可以有效地提高计算速度,实现路径的实时规划,具体流程如图3所示。
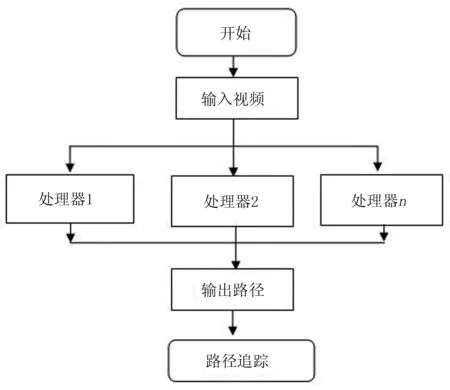
图3 自主导航智能监控系统设计
2智能监控采棉机结构和机器视觉设计
采棉机样机利用其风力输送、液压传动、棉箱等部件与梳脱式采摘台挂接,智能视频监控系统设计在驾驶室,利用多嵌入式平台实现监控系统的实时采集和图像处理。采棉机的总体结构示意图,如图4所示。
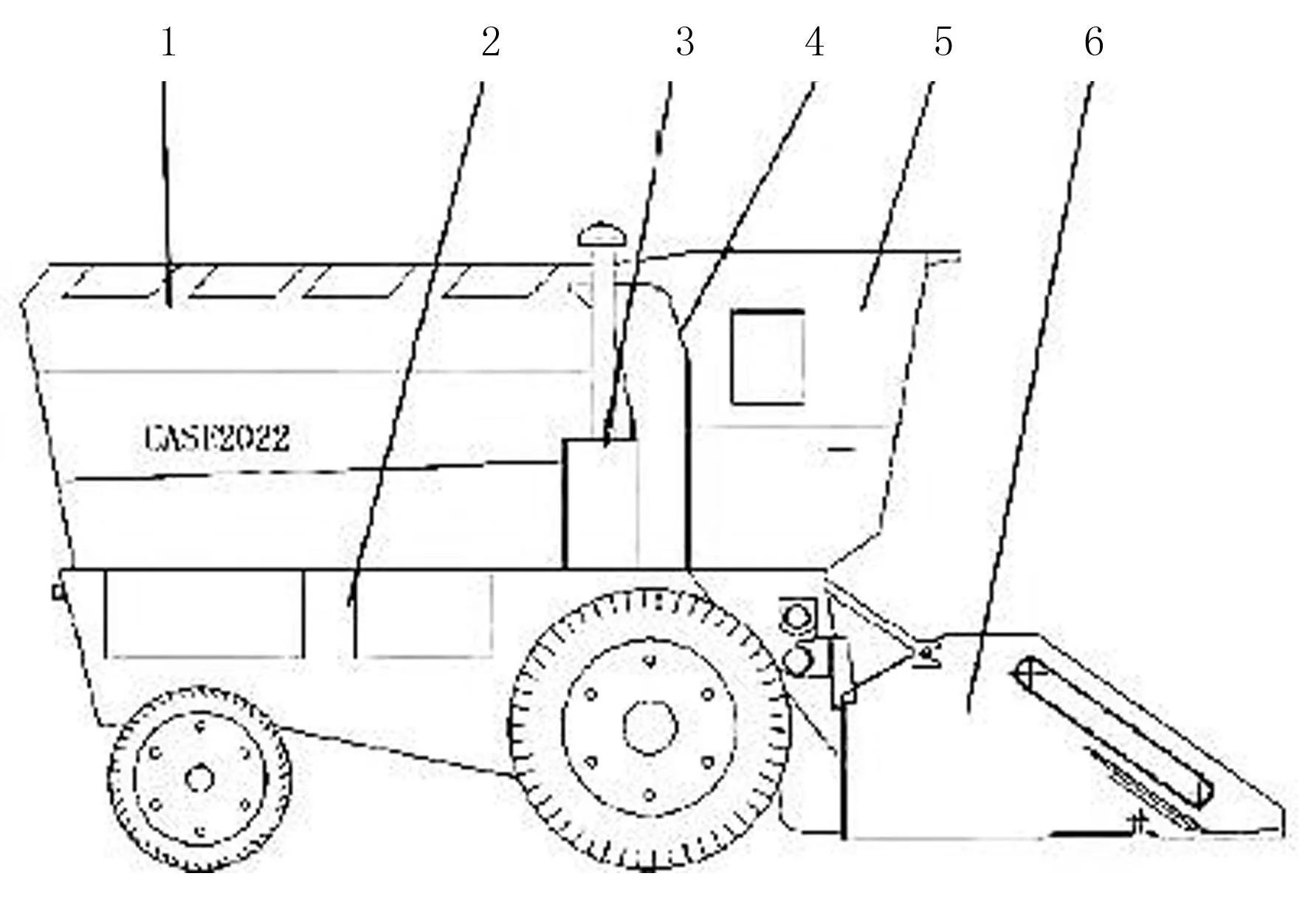
1.棉箱 2.底盘 3.液压系统 4.风力输送系统
本次研究以梳脱式采棉机作为研究对象,梳脱式采摘台是该采棉机的核心工作部件,直接影响整机的性能和采摘质量,其三维模型如图5所示。
其采棉过程主要分为3步,包括采集棉铃、清理和集棉,3步分别由不同的工作单元来完成,其结构示意图如图6所示。其中,采集棉铃的工作由采摘台完成,采摘台负责棉铃的采集,其梳脱式采摘台结构如图6所示。

图5 采棉机采摘台三维模型

1.梳齿总成 2.刮棉总成 3.输棉绞龙
采摘台主要由1组梳齿型的棉铃剥离器组成,在采摘过程中,棉铃主要由梳齿剥离器来剥落,被剥落的棉铃聚集后被送到清理工作单元。

(1)
由式(1)可知:如果实际坐标和图像坐标已知,将投影坐标可做未知数,则可以得8个未知数。所以,已知4个点的图像坐标便可以构成8个方程组成的方程组,其矩阵形式可以表示为
(2)
NM=U
(3)
利用最小二乘的方法可以求出矩阵M为
M=(NTN)-1NTU
(4)
此时,投影矩阵已被求出,于是公式可以写成
(5)

HX=C
(6)
当矩阵H的逆矩阵存在时,有
X=H-1C
(7)
根据式(7)可以得到图像处理后的坐标在实际采棉地块中的坐标,然后可以通过规划路径的方式对坐标点进行追踪,达到采棉机自主导航的目的。
3采棉机智能监控系统测试
为了验证设计的采棉机智能监控系统的有效性和可靠性,在新疆棉田对采棉机的智能监控系统进行了实地测试和功能验证,测试项目包括路径规划、路径追踪和采棉指标。
图7表示采棉机测试作业过程的场景。测试使用梳脱式采摘台的采棉机,在驾驶室安装了多嵌入式平台的云处理计算系统,可以完成复杂大数据视频的处理。图8表示采集得到的视频图。

图7 采棉机作业测试过程图

图8 具有干扰信号的图像信息
受实际地块的影响,实时采集到的信息会存在一定的噪声干扰,使图像的冗余量较大;而采用云处理平台可以加快数据的处理速度,通过计算得到了如图9所示的边缘接触结果。
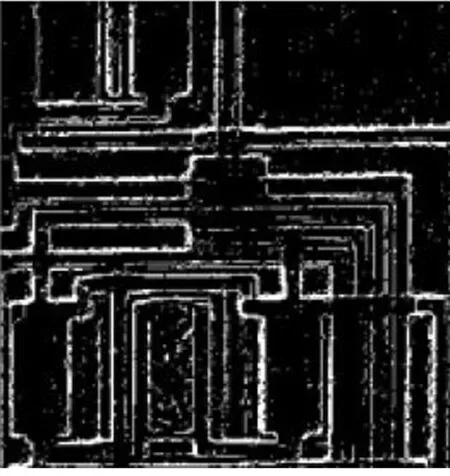
图9 边缘检测结果
由图9可以看出:采用云计算进行边缘检测得到的边缘定位准确、连续性较好,同时不会引入过多的无用信息,而且检测速度快,能够满足后续处理要求。
图10表示采棉地块采集图像的实际标定。在图10中,按照区块划分的方式度地块进行划分并进行标记,然后计算其在图像中的坐标,通过投影矩阵M,得到实际地块中的坐标。图像处理时间耗时如表1所示。

图10 采棉地块图像标定

ms
由表1可以看出:采棉机的智能监控系统采用云处理计算技术后,耗时非常低,最短耗时仅为11.98ms/帧,路径规划时间也非常快,可满足智能监控系统实时处理数据的需要。
图11表示采棉机在实际采棉地块中的轨迹追踪示意图。从图 11可以看出:采棉机追踪过程中,距离规划路径的距离在不断缩小,可以准确地跟踪到规划路径。由此可见,采棉机可以有效的实现规划路径的追踪功能。
表2表示实际采棉的效果。通过测试分析知,采收后的棉花仍然保持了原来棉瓣形状,棉团形状完整,并且采棉机对棉花纤维的破坏很小,采净率可以达到98.2%,落地棉率和含杂率都较低,各项设计性能均达到设计要求。

图11 采棉地块路径跟踪轨迹图

%
4结论
利用多嵌入式虚拟仪器技术方法,对采棉机智能监控系统的性能进行了测试。通过棉田实地测试和功能验证发现:利用云处理计算可以有效地提高计算速度,且可以处理干扰信号线的图像,完成路径规划。对其进行路径追踪测试发现:其路径追踪能力较强,在2m范围内便可以追踪到路径,采棉效果较好,采净率高、落地棉率和含杂率较低,符合采棉机的各项性能设计要求。
参考文献:
[1]张成涛,谭彧,吴刚,等.基于ARM的农业装备共性参数测控系统[J].农业工程学报,2012,28(3):177-183.
[2]田兆锋,叶舸,闫楚良.基于存储策略的农业装备可靠性试验数据存取方法[J].农业工程学报,2011,30(1):30-34.
[3]介战,罗四倍,周学建.基于LabVIEW的联合收割机水稻喂入量遥测试验[J].农业工程学报,2009,25(13): 87-91.
[4]吴海华,方宪法,王德成.我国农业装备技术发展趋势及路径选择[J].农机化研究,2010,32(12):232-235.
[5]陈树人,张朋举,尹东富,等.基于LabVIEW的八爪式机械株间除草装置控制系统[J].农业工程学报,2010, 26(S2):234-237.
[6]李依令.基于多尺度多结构元素的数学形态学边缘检测[J].科学技术与工程,2006,6(10):1417-1419.
[7]王坤,高立群,郭丽,等.多尺度结构元素的数学形态学边缘检测新方法[J].东北大学学报,2008,29(4): 473-476.
[8]梁靓,黄玉清.融合Canny算子和形态学方法的路径识别[J].计算机工程,2006,32(21):200-202.
[9]李丙春,朱国涛.形态学算子在图像处理中的应用[J].喀什师范学报,2008,29(3):45-47.
[10]李鹏,王军宁.摄像机标定方法综述[J].山西电子技术,2007,(4):77-79.
[36]王娜,杜世培.基于数学形态学的细化算法[J].贵州工业大学学报,2007,36(2):60-63.
[11]郭北涛,柳洪义,曹阳,等.基于虚拟仪器技术的电磁阀综合特性测控系统[J].仪器仪表学报,2010,31(2): 294-298.
[12]董伟波,王茜蒨,韩旭.基于虚拟仪器技术的APD噪声等效功率测量系统[J].仪器仪表学报,2011,32 (11): 2636-2640.
[13]赵弘,赵毅鑫.基于虚拟仪器的工业CT无线自动加载测试系统[J].仪器仪表学报,2012,33(8):1754- 1757.
[14]王振跃,施艳,刘存祥.微波消毒对土壤中病原微生物的防治效果[J].河南农业科学,2010(12):92-94.
[15]刘文丽,马林.蔬菜保护地连作土壤肥力形状调查研究[J].安徽农业科学,2006,34(19):4987-4988.
[16]曹坳程,郭美霞,王秋霞,等.世界土壤消毒技术进展[J].中国蔬菜,2010(21):17-22.
[17]刘晓丽,陈发,王学农.4MZ-3000型梳齿式采棉机梳齿部件的结构分析[J].新疆农业科学,2011,48(9):1635-1639.
[18]郭文松,坎杂.网状滚筒式籽棉残膜分离机物料特性分析[J].农业工程学报,2011,27(S2):1-5.
[19]姚继权,李晓豁,刘桂玲.刮板输送机虚拟装配与运动仿真的研究[J].矿山机械,2010,38(1):4-7.
[20]庞美荣,王春维.埋刮板输送机物料滞后的分析及其控制[J].粮食与饲料工业,1998(11):11-12.
[21]刘晓丽,陈发,王学农,等.国内外梳齿式采棉机技术比较分析研究[J].农机化研究,2012,34(3):14-17.
[22]韩玲丽,王学农,陈发,等.4MZ-3000型自走式梳齿采棉机清花装置的试验研究[J].农机化研究,2012,34(7):169-172.
[23]姜西北.新疆机械化采棉存在的问题及应对措施[J].江西棉花,2009,31(3):22-23,31.
The Monitoring System Design of Cotton Picker Based on Embedded Cloud Computing Platform
Zhang Weiwei1, Wang Zheng1, Yang Jingyi1, Yu Liangjun2
(1.Hebei Polytechnic Institute,Shijiazhuang 050091, China; 2.Faculty of Mechanical & Electronic Information,China University of Geosciences,Wuhan 430074,China)
Abstract:In order to improve the autonomous navigation capabilities of the cotton picker, realize the path planning of online control, the cotton production of intelligent monitoring system were studied to design an embedded platform. With introducing intelligent control system, it adopts cloud computing method of multi platform nodes to connect the cotton plots by video acquisition and the real-time and intelligent processing. In order to validate the reliability of intelligent monitoring system,we have tested many functional verification in intelligent monitoring system for cotton in cotton fields.According to the test result, the monitoring system can effectively make the cotton picker complete path planning, to finish line path tracking with high precision,the high mining net rate, lower landing cotton rate and impurity rate. In line with the large machinery demand for picking cotton automation design,the study for cloud processing technology in the embedded platform provides an effective solution for large-scale intelligent machinery and equipment automation and information monitoring instrument development with guidance and reference significance.
Key words:intelligent monitoring; autonomous navigation; path planning; embedded; cloud computing; cotton picker
文章编号:1003-188X(2016)07-0050-05
中图分类号:S225.91+1
文献标识码:A
作者简介:张微微(1980-),女,河北邯郸人,讲师,硕士。通讯作者:余良俊(1984-),女,武汉人,副教授,博士研究生,(E-mail)yuliangjun1984@126.com。
基金项目:湖北省自然科学基金项目(2014CFC1079);湖北省自然科学基金计划面上项目(2013CFB418)
收稿日期:2015-07-05
猜你喜欢
中国科技纵横(2016年20期)2016-12-28
电子技术与软件工程(2016年22期)2016-12-26
电子技术与软件工程(2016年20期)2016-12-21
科技视界(2016年26期)2016-12-17
电脑知识与技术(2016年26期)2016-11-25
电脑知识与技术(2016年21期)2016-10-18
大学教育(2016年9期)2016-10-09
科技视界(2016年20期)2016-09-29
科技视界(2016年20期)2016-09-29
电脑知识与技术(2016年10期)2016-06-16
