
基于狗獾爪趾的仿生深松铲结构设计与试验
2016-03-23 04:34白景峰吕秀婷党革荣史江涛
农机化研究 2016年4期
关键词:仿生
白景峰,李 博,吕秀婷,陈 军,党革荣,史江涛
(1.西北农林科技大学 机械与电子工程学院,陕西 杨凌 712100;2.西安亚澳农机股份有限公司,西安 710300)
基于狗獾爪趾的仿生深松铲结构设计与试验
白景峰1,李博1,吕秀婷1,陈军1,党革荣1,史江涛2
(1.西北农林科技大学 机械与电子工程学院,陕西 杨凌712100;2.西安亚澳农机股份有限公司,西安710300)
摘要:针对现有深松铲存在的耕作阻力较大及能耗较高等问题,利用仿生学原理将狗獾爪趾的曲线应用到深松铲的结构设计中,设计了一种铲柄刃口为多项式曲线、铲尖为圆弧形的新型深松铲。为研究其耕作效果,将所设计的深松铲与国标深松铲进行了室内土槽对比试验。试验结果表明:在相同的深松试验条件下,仿生深松铲比国标深松铲的耕作阻力减小了13.33%~21.72%,仿生深松铲减阻效果明显;仿生铲柄与国标铲尖组合比国标深松铲耕作阻力减小了3.01%~7.61%,仿生铲尖与国标铲柄的组合比国标深松铲耕作阻力减小了7.67%~16.97%,仿生铲尖的减阻效果显著于仿生铲柄的减阻效果。
关键词:深松铲;仿生;狗獾爪趾;土槽试验
0引言
深松技术是指深松铲、深松梨运用不同的深松机械配合相应的动力机械,完成田间深松作业的机械化技术[1-3]。深松作业可以在不翻耕土壤的基础上,打破犁底层,保护地表植被,降低风蚀水蚀的危害,增强土壤的蓄水保墒能力,并提高土壤中微生物的生活率及土壤肥性,有利于农作物根系的生长发育[4-6]。但现阶段所研究的深松机械具有耕作阻力较大、能耗较高和深松效果不好等缺点,因此降低耕作阻力成为限制深松机械发展的主要因素[7-10,14]。
近年来,许多学者对深松铲进行了大量的研究工作,并取得了较好的研究成果。李博运用离散元法对深松铲耕作因素的影响进行了分析[6,11]。赵大为采用偏心装置设计了一种被迫式振动深松机术[12]。杨有刚等设计了一种具有往复插土式浅松功能,还可进行土壤深松作业的浅深松联合松耕机[13]。随着仿生学的不断发展,许多学者运用仿生学进行深松铲的设计。龚浩辉等对家鼠进行研究,对深松铲进行了结构优化,并与国标深松铲进行了理论受力对比分析,表明仿生深松铲减阻效果明显[15]。张金波等基于指数函数曲线,针对家鼠的爪趾进行了深松铲的仿生减阻设计[16]。
本文在前人研究的基础上,针对狗獾进行仿生减阻深松铲的结构设计,并对所设计的仿生深松铲与国标深松铲进行土槽对比试验,验证其减阻效果。
1仿生深松铲结构设计
1.1铲尖结构设计
通过对狗獾前爪趾结构进行研究,发现其爪趾尖部呈锥形,在长期的挖掘过程中,由于磨损使得尖部的硬度和韧性都比爪趾其他地方要强[14,17]。借助自身肌肉的收缩运动,狗獾能够很好地完成土壤的破碎和搬运工作。
通过对其前端曲线的提取和分析,并进行相应的多项式拟合,得到曲线如图1所示。
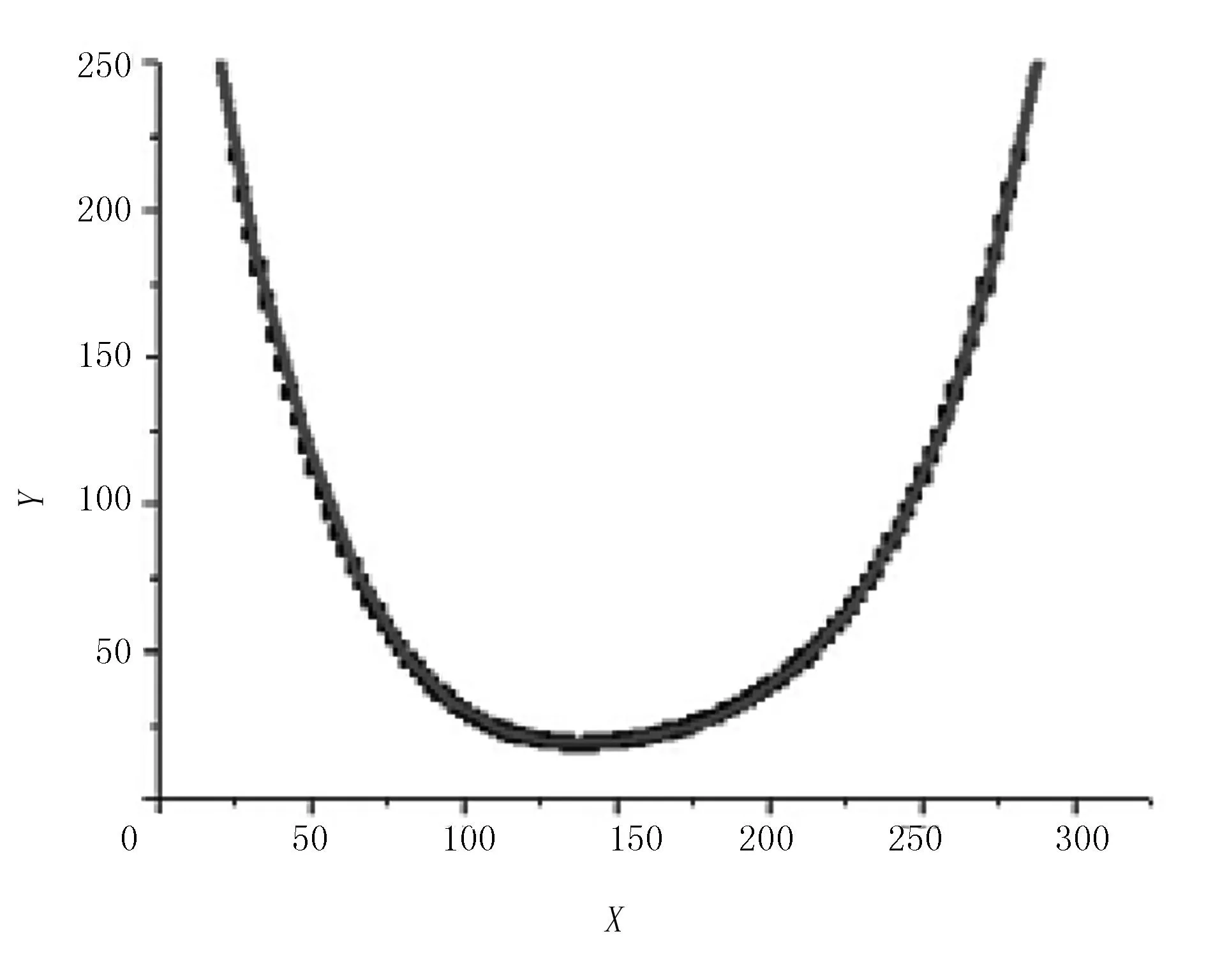
图1 狗獾爪趾尖端拟合曲线
同时,可以得到拟合精度R2=0.995 67的原形态曲线拟合方程为
y=393.88922-8.57804x+0.07406x2-
2.92722×104x3+4.61938×10-7x4
(1)
根据国标JB/T9788-1999的深松铲铲尖参数与所提取曲线的方程,确定其放大倍数δ=0.156。因此,仿生铲尖的实际曲线拟合方程为
y=61.54759-8.57804x+0.4474397x2-
0.011989x3+0.00012108x4
(2)
根据现有的耕作部件研究成果可知:在不压实下部和侧面土壤的条件下,应使铲尖与地面的隙角(见图2)ε≥3°。根据前人所研究的相关内容[18]及切削角α与土壤条件的关系,确定本次设计的切削角α=23°。
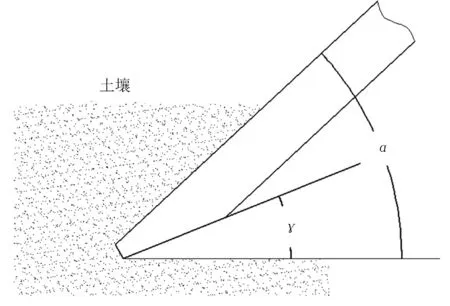
图2 铲尖隙角γ与切削角α
1.2铲柄结构设计
深松铲结构除铲尖外,铲柄也是其不可缺少的一部分。深松铲铲柄(见图3)同铲尖相同,对深松作业的耕作深度、耕作速度、耕作阻力、耕作范围和土壤破碎程度有着重要的影响。
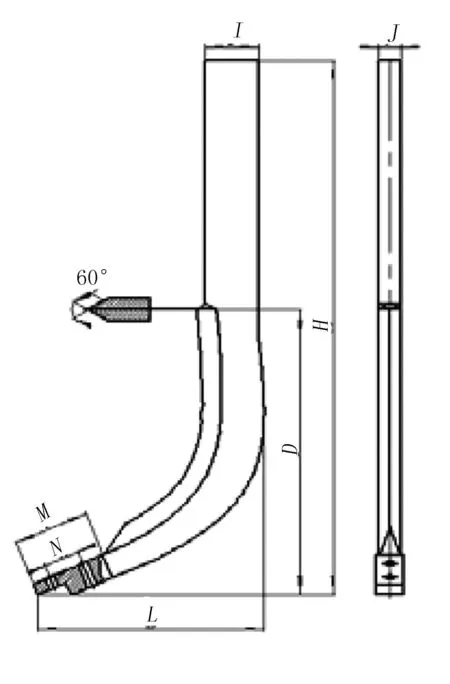
图3 深松铲铲柄
结合现有的理论分析和试验研究发现:当深松铲铲柄伸长量(纵向尺寸在耕深范围内的水平长度)L与深松铲耕作深度D的比值L/D分布在0.68 ~ 1.04时,深松铲减阻性能更加明显;尤其是当L/D=0.8左右时,深松效果最好,减阻性能最好。
运用仿生学原理,针对狗獾的爪趾的内边缘曲线进行提取,并进行数据拟合分析,可以得到拟合精度R2=0.997 41的初始边缘曲线的多项式拟合方程为
y=319.39916-1.70123x+0.00796x2-
1.76587×10-5x3+1.5323×10-8x4
(3)
通过与JB/T9788-1999的深松铲铲柄对比,可以获得放大参数δ=0.658。同时,获得最终拟合的多项式方程为
y=210.18423-1.70123x+0.012097x2-
4.07856×10-5x3+5.37856×10-8x4
(4)
本次设计的铲柄宽60mm、厚25mm、水平长度为253mm,铲柄与铲尖均采用65Mn制造,最大耕作深度为320mm,其他参数均参照国标深松铲进行设计制造[19-20]。因此,基于多项式拟合的仿生深松铲结构如图4所示。
图4 多项式曲线型仿生深松铲
2试验与结果分析
2.1试验条件
试验地点在陕西杨凌西北农林科技大学机电学院室内土槽进行,土槽尺寸为长27.0m、宽2.3m、深1.5m;试验土壤为陕西关中地区农田土壤,属于黄土母质上发育的农业土壤[13],平均含水率为17%。据深松作业基本要求,确定本次试验的耕作深度为200、250、300mm,耕作速度选择0.6、0.8、1.0m/s。为更好地研究仿生深松铲减阻效果,在进行试验时将仿生深松铲与国标深松铲进行交互试验,将深松铲类型分为仿生深松铲、仿生铲柄国标(凿形)铲尖、国标铲柄仿生铲尖和国标深松铲4种类型。
本试验以土槽试验车为试验平台,承载试验所需的试验设备(见图5),试验所选用的传感器为上拉杆传感器(型号:CYB-602S)与悬挂销传感器(型号:CYB-601S)。试验车上安装了动态数据采集器,通过内置无线发射装置(SZ02-USB-2K)将所采集的信号发送到遥测采集程序中,将所采集的信号转化为耕作阻力进行保存。

图5 深松铲固定及悬挂装置
2.2试验内容与方法
通过仿生深松铲与国标深松铲在相同条件下的交互性试验,研究仿生深松铲的减阻效果及其减阻效果的主要来源。
本次深松铲减阻性能试验所需土壤的有效长度为23m,为得到相对较准确的实验数据将有效长度分为3部分:前6m为深松铲入土阶段和试验车加速阶段,中间11m为试验稳定测量阶段,后6m为深松铲出土阶段和试验车减速阶段。此次试验的有效宽度为1.8m,为保证深松铲之间的对比性和对土槽试验空间的有效利用,每次在土槽内进行两次深松试验,每次试验深松铲距离土槽导轨内侧为500mm,缩短了试验时间,提高了试验效率。
3结果与分析
表1为4种不同组合的深松铲(仿生深松铲、仿生铲柄+国标铲尖、国标铲柄+仿生铲尖、国标深松铲)分别在3种速度(0.6、0.8、1.0m/s)和3种耕深(200、250、300mm)的试验因素下所得到的水平耕作阻力的平均值。其中,γ1表示仿生深松铲相比较国标深松铲的减阻率,γ2表示仿生柄国标尖相比较国标深松铲的减阻率,γ3表示国标柄仿生尖相比较国标深松铲的减阻率。

表1 不同组合深松铲耕作阻力试验结果
通过对表1进行深松作业耕作阻力的分析可知:在相同耕作条件下,仿生深松铲的耕作阻力最小,国标深松铲的耕作阻力最大,且仿生铲柄与国标铲尖组合的耕作阻力明显大于仿生铲尖与国标铲柄的耕作阻力。对于相同类型的深松铲,当深松耕作深度一定时,深松作业的耕作阻力随着耕作速度的不断增大而增大;深松作业速度一定的时候,深松作业的耕作阻力随着耕作深度的不断加深而增大。
通过对表1中深松铲减阻率的分析可知:仿生深松铲相对于国标深松铲的耕作阻力减小了13.33%~21.72%,表明仿生深松铲与国标深松铲相比具有明显的减阻效果,平均减阻17.87%;仿生铲柄与国标铲尖组合相对于国标深松铲的耕作阻力减小了3.01%~7.61%,平均减阻5.22%;仿生铲尖与国标铲柄组合相对于国标深松铲耕作阻力减小了7.67%~16.97,平均减阻13.25%。由此表明:仿生铲尖相对于国标铲尖的减阻效果明显优于仿生铲柄相对于国标铲柄的减阻效果。
4结论
1)深松铲的耕作速度与耕作深度对耕作阻力具有显著影响,且耕作阻力随着耕作速度和耕作深度的增大而增大,并由两者相互作用。
2)在相同的耕作深度与耕作速度下,仿生深松铲相比较国标深松铲的耕作阻力减小了13.33%~21.72%,平均减阻17.87%,减阻效果明显。
3)仿生铲柄与国标铲尖组合相比较国标深松铲,耕作阻力减小了3.01%~7.61%,平均减阻5.22%;而仿生铲尖与国标铲柄的组合相比较国标深松铲,耕作阻力减小了7.67%~16.97%,平均减阻13.25%。仿生铲尖的减阻效果明显优于仿生铲柄的减阻效果。
参考文献:
[1]Li Bo,Liu Fangyi, Chen Jun, et al. Distinct element method analysis and field experiment of soil resistance applied on the subsoiler[J].International Journal of Agricultural and Biological Engineering,2014,7(1):54-59.
[2]余泳昌,刘文艺,赵迎芳,等.立柱式深松铲受力数学模型及试验分析[J].农业工程学报,2007(6):109-113.
[3]李洪文,陈君达,李问盈.保护性耕作条件下深松技术研究[J].农业机械学报,2000,31(6):42-45.
[4]Li M, Chen D H, Zhang S J, et al. Biomimetic design of a stubble-cutting discusing finite element analysis[J].Journal of Bionic Engineering,2013(10) :118-127.
[5]郭志军,周德义.几种不同触土曲面耕作部件的力学性能仿真研究[J].机械工程学报,2010(15):71-75.
[6]李博,刘凡一,陈军,等.深松铲耕作阻力影响因素的离散元法仿真分析[J].农机化研究,2015,37(2):71-74.
[7]鄂卓茂,刘清平.行走式节水灌溉理论与实践[M].北京:中国农业出版社,2005:1-19.
[8]郭志军,佟金,周志立,等.深松技术研究现状与展望[J].农业工程学报,2001(6):169-173.
[9]洪筠,崔占荣,任露泉.仿生犁与普通犁作业综合经济效益的对比分析[J].农业机械学报,2006(10):93-96.
[10]Kathryn Page,Yash Dang,Ram Dalal.Impacts of conservation tillage on soil quality,including soil-borne crop diseases, with a focus on semi-arid grain cropping systems[J].Australasian Plant Pathol, 2013(42):363-377.
[11]李博,陈军,黄玉祥.机械与土壤相互作用的离散元仿真研究进展[J].农机化研究,2015,37(1):217-222.
[12]赵大为.振动深松机的研究设计[J].农业科技与装备,2010(4):29-30.
[13]杨有刚,张宏,冯涛,等.土壤浅深松联合松耕机设计和浅松土试验[J].机械工程学报,2012(19):163-168.
[14]陈东辉.典型生物摩擦学结构及仿生[D].长春:吉林大学,2007.
[15]龚皓晖,王霜.仿生深松铲结构设计与有限元分析[J].农机化研究,2013,35(7):53-57.
[16]张金波,佟金,马云海.仿生减阻深松铲设计与试验[J].农业机械学报,2014(4):141-145.
[17]谷志新,郑文超.狗獾前肢挖掘洞穴运动图像采集[J].经济动物学报,2013(3):152-154.
[18]Li Bo, Liu Fanyi, Xia Rui, et al. Distinct element method analysis and experiment of a biomimetic subsoiler[J].International Agricultural Engineering Journal,2015(1):47-54.
[19]全国农业机械标准化技术委员会.JB/T9788-1999 深松铲和深松铲柄[S].北京:机械科学研究院,1999.
[20]张强,张璐,于海业,等.复合形态深松铲耕作阻力有限元分析与试验[J].农业机械学报,2012(8):61-65.
Structure Design and Test of the Badger Claws Bionic Subsoiler
Bai Jingfeng1, Li Bo1, Lv Xiuting1, Chen Jun1, Dang Gerong1, Shi Jiangtao2
(1.Collage of Mechanical and Electronic Engineering, Northwest A & F University, Yangling 712100, China; 2.Xi’an Yaao Agricultural Machinery Co.Ltd. ,Xi’an 710300,China)
Abstract:The problem of greater cultivation resistance,higher energy consumption and other issue exists in the traditional subsoiler. In this paper, the curve of the badge claws is applied in the structural design of subsoiler according to the principle of bionics, it has designed a new subsoiler which contains the share shaft of polynomial curve and the sweep point of circular arc. In order to study the cultivation effect, we do the contrast experiment to bionic subsoiler and traditional subsoiler in soil-bin laboratory.The result showed that the bionic subsoiler's tillage resistance decreased by 13.33% ~ 21.72% and the drag reduction effect was obvious in comparison to traditional subsoiler under the same test conditions. If the bionic share shaft combined with the traditional sweep point, the tillage resistance will be reduced by 3.01%~7.61% compared to the traditional subsoiler. While the combination of the bionic sweep point and the traditional share shaft decreased by 7.67%~16.97% than the traditional subsoiler in the tillage resistance.Thus the difference of the drag reduction effect of the bionic sweep point and the bionic share shaft was significant.
Key words:subsoiler; bionic; badger claws; soil-bin test
文章编号:1003-188X(2016)04-0175-05
中图分类号:S222.12+9
文献标识码:A
作者简介:白景峰(1989-),男,河北沧州人,硕士研究生,(E-mail)541522260@qq.com。通讯作者:陈军(1970-),男,宁夏固原人,教授,博士生导师, (E-mail)chenjun_jdxy@nwsuaf.edu.cn。
基金项目:“十二五”国家科技支撑计划项目(2011BAD29B08);陕西省科学技术研究发展计划项目(2014K02-09-03)
收稿日期:2015-04-11
猜你喜欢
科技创新与应用(2017年15期)2017-05-31
科学与财富(2017年12期)2017-05-16
成长·读写月刊(2017年1期)2017-03-04
江苏农业科学(2017年1期)2017-02-27
文艺生活·中旬刊(2016年11期)2016-12-13
科技视界(2016年6期)2016-07-12
广西教育·C版(2016年1期)2016-03-10
