拖拉机导航系统中转向操纵控制精度的试验研究
2016-03-23 03:20张长龙王月林
农机化研究 2016年3期
任 玲,张长龙,王月林
(石河子大学 机械电气工程学院,新疆 石河子 832000)
拖拉机导航系统中转向操纵控制精度的试验研究
任玲,张长龙,王月林
(石河子大学 机械电气工程学院,新疆 石河子832000)
摘要:转向操纵控制系统执行效果的优劣决定了导航车辆工作的准确性和稳定性。为此,以试验的方法对现有导航系统中转向操纵控制平台进行硬件测试、角度传感器标定、步进电机测试和角度传感器精度测试试验,提出从硬件上提高精度的方法。同时,根据转向操纵控制器中执行机构步进电机存在的小角度难以响应的问题,进行了控制电路设计和仿真,实现了对小角度信号的快速响应,为提高导航操纵控制器精度提供了思路。
关键词:拖拉机;导航;转向操纵控制;精度提高
0引言
拖拉机是农业生产中重要的动力机械,可与附装的、悬挂的或牵引的农机具一起完成大部分的田间作业。随着精准农业的发展,作业精度不断提高,对拖拉机行走速度和航行精度提出了更高的要求[1]。自动转向控制技术是实现农业机械智能导航控制的关键技术之一[1-2]。转向操纵控制系统是指根据上位机控制指令,驱动转向前轮转到指定角度的自动控制系统,其执行效果的优劣决定了导航车辆工作的准确性和稳定性[3]。
在系统给出车辆当前定位数据之后,系统要做的工作就是决定下一步车辆该向哪里走以及如何实现的问题。在国内外的相关研究中,导航控制系统普遍被分解成导航控制器和操纵控制器两个部分[4]。导航控制器主要完成车辆定位和转向轮转角计算,操纵控制器则完成期望转向轮转角的执行。转向轮转角是操纵控制器的控制输入量,其计算多采用PID、模糊控制及最优控制等方法[5]。
1研究思路
在操纵控制器方面,研究人员致力于开发电液操控系统,用于实现转向动作或通过直流电机驱动器来控制电机带动方向盘转动完成操纵控制动作。转向操纵控制器和转向控制算法的实现也是多种多样的。从执行效果方面来说,在整个控制过程中,转向轮易出现震荡和超调的情况,尤其是在大角度转弯处,转向轮的震荡表现得更加严重。因此,系统控制的精度和稳定性有待进一步的提高。
从转向控制方法方面来说,目前常用的方法有基于运动学模型的控制方法,此方法仅针对车辆低速运动的情况;基于动力学模型的控制方法,运用非线性动力学模型,采用优化校正的方法,仅适合拖拉机沿正弦曲线前进;基于智能控制的方法,此方法不需精确的数学模型就能解决许多不确定的、非线性的自动化问题;基于PID控制的方法,由于算法简单、鲁棒性好和可靠性高被广泛应用于过程控制和运动控制。
这些控制方法在控制精度以及环境因素要求等方面均存在一定的局限性,算法忽略了系统的重要特性,对系统没有清楚的认识,也没有对系统非线性因素进行测试。
从系统硬件方面来说,系统目前使用的控制电路有提升的空间。因此,有必要结合现有的试验平台,在硬件选型和电路设计上找原因,从优化控制算法的角度出发,提高操纵控制器的动态响应精度和响应速度。
2硬件测试试验和影响因素分析
2.1角位移传感器标定试验
角位移传感器的作用是将拖拉机前轮的转向角转换为电压信号,然后输入到转向控制器,作为控制器的反馈信号。前轮转角标定试验主要用来标定前轮转角传感器输出信号与前轮转角的对应关系[3],采用实际测量计算与信号采集共用的方法,其标定原理如图1所示。

图1 角位移传感器标定原理图
其中,α为拖拉机前轮转向角;R为拖拉机前轮半径;L为拖拉机转动后前轮最外端距初位置的距离。
由于L=AB,R=OA=OB,α=∠AOB,则有sin(α/2)=L/2R。
所以,α=360/π·arcsin(L/2R)。
因而通过测量不同转角下的L值,便可得到此时的转角大小。通过试验传感器采集程序可测到此传感器的值,试验结果如表1所示。
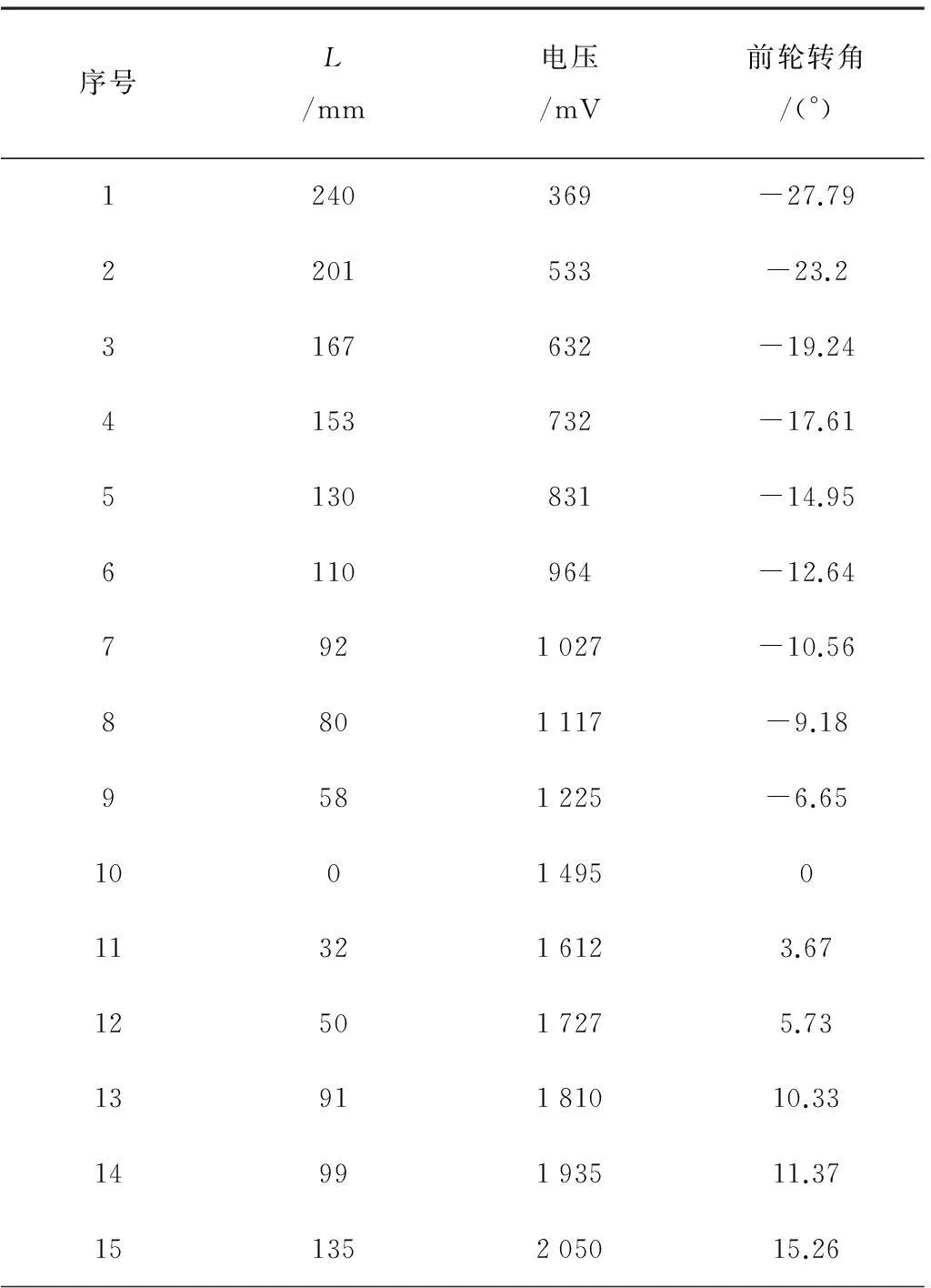
表1 角位移传感器标定试验数据表

续表1
试验结论:角度传感器的测量数据与传感器的安装位置有关,传感器的标定试验主要用来标定传感器输出的电压信号与执行机构位置之间的关系。由于接收的角度为AD转换得来,控制器AD转换精度度直接影响标定的准确性;应设法提高AD转换精度,同时也要提高角度传感器本身的精度。
利用上述标定方法可以简单、方便对前轮角度传感器进行标定,方法可行,易操作,标定结果能达到自动转向的要求。
2.2步进电机测试试验
步进电机是由电脉冲控制的同步电动机,对应每一个供电脉冲,都产生一个恒定量的步进运动,即在一定频率连续脉冲供电时可以得到恒定的转速,与负载无关。所以,控制步进脉冲信号的频率就可以对电机精确调速,控制步进脉冲的个数,从而对电机精确定位。
为了使电机更精确更稳定地转动,选择了细分数为4 000脉冲数/转、控制器中的脉宽调制器PWM输出单边沿的脉冲信号,在控制板中编写好步进电机控制程序,利用RAM5749的GPIO输出口来输出控制信息。PH0为控制脉冲输出口,PB4为方向控制信号,通过全液压转向器的具体参数来设定速度,通过实际转向来调整步进电机的速度。试验数据如表2、图2所示。

表2 步进电机转向测试数据表
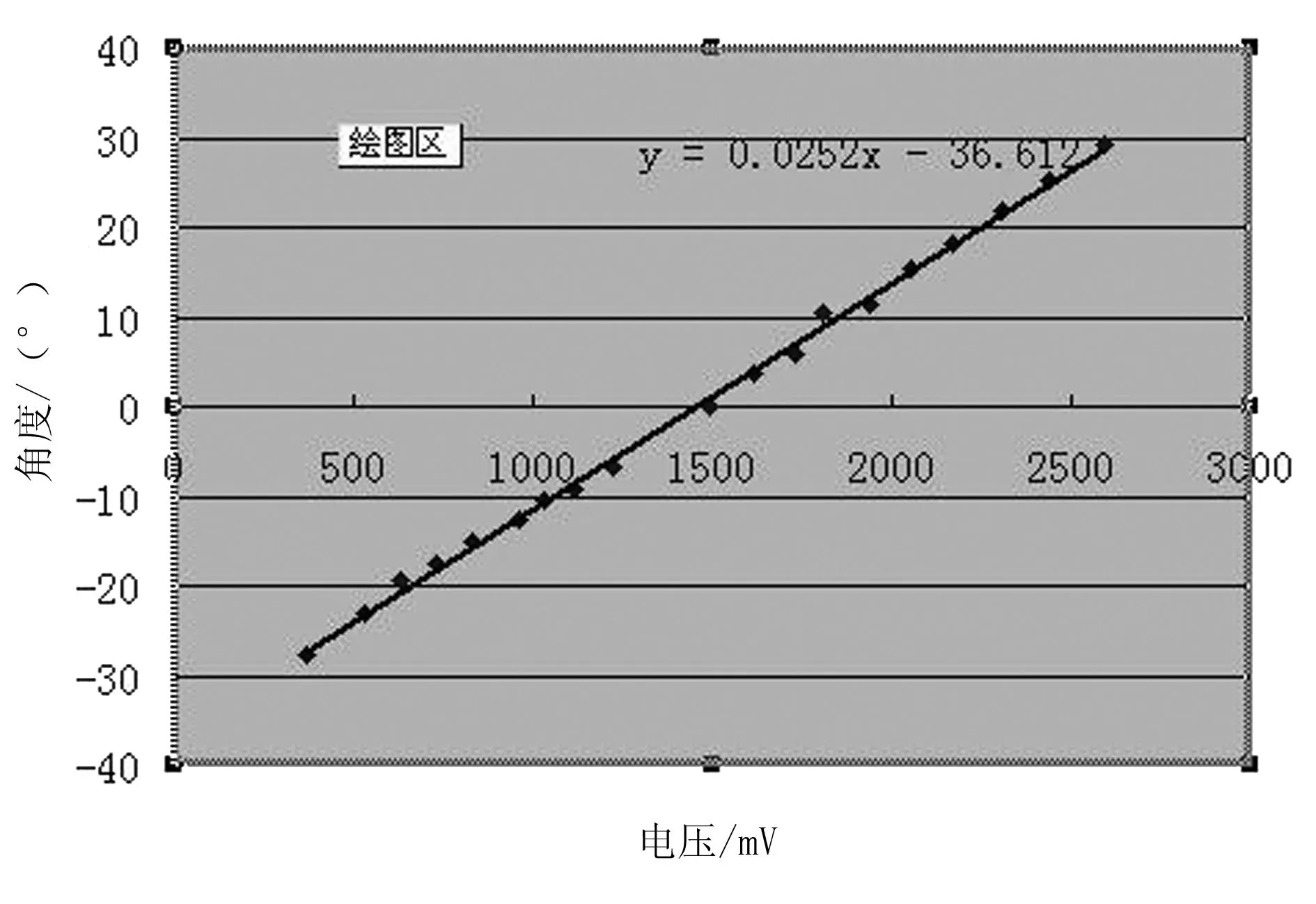
图2 步进电机转向测试数据图
结论:步距角是步进电机的一个重要参数,是每给一个脉冲电机转过的角度,有必要通过步进电机的选型PWM信号的调理来提高控制精度;步进电机的转向,严格按照程序控制运转的,安全性较高,可以用来控制自动转向。步进电机的启动和换向有一定的时间延迟,控制时需要充分给予考虑;针对小目标转角的响应能力和相应速度也是提高控制精度重要因素。
2.3角度传感器精度测试试验
角度传感器是自动转向的反馈装置,其精度和平滑性直接影响自动转向的控制过程。角度传感器的输出量为模拟量(电压),通过ARM5749对其进行AD转换,在转换的过程中通过适当的滤波处理,可以提高其平滑性和精度,进而提高自动转向的精度。为此,采用中值滤波的方法对角度传感器的输出结果进行处理,试验结果如图3、图4所示。
结论:比较两次数据,可以看出采用中值滤波的方法可以明显的提高精度和平滑性。对角度传感器进行适当的滤波处理是提高其控制精度的重要因素。
3硬件电路的设计与仿真
3.1电路设计
采用深圳宏晶公司生产的8位微处理器STC90C516RD+,指令代码完全兼容传统51单片机。它是转向控制器的核心,具有3个基本的重要功能:一是实时地采集数据并进行处理,即把传感器输出的模拟信号转换为计算机可以进行处理的数字信号;二是根据传感器计算得到目标转角和传感器测得的实际转角进行比较,得出需要的偏差信号,从而控制步进电机完成转向和转速的操作;三是利用CAN总线实现上下位机之间的数据和控制命令的传输。
以STC单片机为核心,利用其本身带的功能模块,通过角位移传感器获取转向轮实际转角,然后单片机实际转角与目标转角相比较得出转向轮的偏差信号。由PID控制算法根据偏差信号得出控制步进电机转速的步进脉冲周期,再由脉宽调制器计算得到的脉冲周期向步进电机驱动器发送PWM脉冲,控制步进电机的转速和转向,从而控制转向轮快速地跟踪目标转角,实现准确转向。系统控制电路硬件框图如图5所示。

图3 无滤波处理实验结果

图4 有滤波处理试验结果

图5 控制电路硬件框图
3.2试验和仿真
在此,对电路进行了小目标转角的测试试验,转角范围选择在-6°~6°,当输入目标转角和实际转角,经过处理后得出偏差角度。当偏差角度为分别为1°、2°、3°、4°、5°、6°(见图6),在示波器上显示出步进电机四相的脉冲波形。

图6 系统仿真结果
试验证明:采用STC单片机作为转向控制器的核心,利用角位移传感器获取转向轮实际转角,然后单片机将实际转角与目标转角相比较得出转向轮的偏差信号作为输入信号;由PID控制算法根据偏差信号得出控制步进电机转速的步进脉冲周期,再由脉宽调制器计算得到的脉冲周期向步进电机驱动器发送PWM脉冲;把PWM脉冲作为输出信号,控制步进电机的转速和转向,从而控制转向轮快速地跟踪目标转角,实现准确转向。此方法初步解决了转向过程中震荡和超调的问题,实现了小角度转向的快速响应,为提高导航操纵控制器的精度提供了思路。
4结论
对拖拉机导航系统中转向操纵控制精度进行了研究,从硬件角度入手,开发设计了硬件的测试和精度测试试验。同时,针对小角度转向中具有延迟现象的问题进行了硬件电路的设计, 实现了小目标转角的电路仿真和开发板的硬件测试、小角度转向的快速响应。步进电机的控制具有延时现象,具体的延时过程要通过算法的优化去研究,下一步主要从软件和算法的角度对控制效果进行精度分析试验测定,并通过仿真分析的方法对算法进行优化,寻求更合理的算法。
参考文献:
[1]吴晓鹏,赵祚喜,张智刚,等.东方红拖拉机自动转向控制系统设计[J].农业机械报,2009,40(z1):1-5.
[2]王静,鲁植雄,常江雪,等.拖拉机线控液压转向系统的设计与实验[J].中国农机化学报,2013,34(6): 188-192.
[3]徐琳琳.拖拉机自动导航系统控制器的研制[D] .北京:中国农业大学,2011.
[4]陈文良.拖拉机自动驾驶转向控制系统的研制[D].北京:中国农业大学,2006.
[5]王尚俊.基于最优控制理论的拖拉机导航系统研制[D]. 北京:中国农业大学,2009.
[6]周建军,张漫,汪懋华,刘刚,等. 基于模糊控制的农用车辆路线跟踪[J]. 农业机械学报,2009,40(4):151-155.
[7]罗锡文,张智刚,赵祚喜,等.东方红X-804拖拉机的DGPS自动导航控制系统[J].农业工程报,2009,25(11): 139-145.
[8]赵建东,安秋,姬长英,等.基于东方红-SG250拖拉机的自动转向控制系统设计[J].江苏农业科学,2013,41(4):349-351.
[9]吴延霞,赵博,毛恩荣.农业车辆自动导航系统综述[J].农机化研究,2009,31(3):242-245.
[10]Prof Simon Blackmore. A specification for an autonomous mechanization system[D]. Guangzhou:South China Agricultural University, 2008.
[11]Beom-Soo Shin. Autonomous-guidance technology in small-size orchard farm[D].Guangzhou:South China Agricultural University,2008.
Experimental Research of Directional Steering Control Precision on Tractor Navigation System
Ren Ling, Zhang Changlong, Wang Yuelin
(Mechanical and Electrical Engineering College, Shihezi University,Shihezi 832000,China)
Abstract:The merits of the steering control system executed effect determines the navigation accuracy and stability of the vehicle work.This paper introduced the experiment method of existing steering control platform in the navigation system hardware test.Angle sensor calibration experiment,stepper motor test and angle sensor precision test are designed and conducted. Improve the precision of factors from the view of hardware is put forward. At the same time we performed the control circuit design and simulation for the difficult to response to the problem of small angle in stepper motor which is steering control actuators.The test achieved the small angle signal of fast response, provided ideas for improving accuracy of navigation control controller.
Key words:tractor; navigation; the steering control; precision improving
文章编号:1003-188X(2016)03-0163-04
中图分类号:S219.032.3
文献标识码:A
作者简介:任玲(1978-),女,江苏连云港人,副教授,硕士,(E-mail) 2542958572@qq.com。
基金项目:国家高技术研究发展计划项目(2013AA102307);石河子大学优秀青年项目(2013ZRKXYQ05)
收稿日期:2015-02-09
猜你喜欢
小学生学习指导(小军迷联盟)(2021年11期)2022-01-18
创新作文(小学版)(2019年4期)2019-07-24
小学生必读(低年级版)(2019年3期)2019-07-08
儿童故事画报(2018年4期)2018-05-21
儿童时代·幸福宝宝(2017年7期)2017-10-13
小学生导刊(2017年15期)2017-05-17
中国新技术新产品(2017年2期)2017-01-20
科技创新与品牌(2016年11期)2017-01-09
中国新技术新产品(2016年23期)2016-12-26
科技视界(2016年4期)2016-02-22