一种抓取果实的欠驱动手指机构设计与静力学分析
2016-03-23 03:20尹建军
农机化研究 2016年3期
王 通,尹建军
(江苏大学 现代农业装备与技术教育部重点实验室,江苏 镇江 212013)
一种抓取果实的欠驱动手指机构设计与静力学分析
王通,尹建军
(江苏大学 现代农业装备与技术教育部重点实验室,江苏 镇江212013)
摘要:为了给类球形果实采摘机器人提供一种拟人手指的末端执行器,设计了一种欠驱动手指机构。通过设置指节限位块,并在中间传力机构两个转动副处添加不同刚度系数的扭簧,使欠驱动手指机构各指节在限位块约束的角度范围内依序转动,包络抓取物体时其构型稳定,并能保证各指节回程运动能回到手指机构的初始位置。同时,利用虚功原理建立了手指在包络抓取物体时各指节与物体之间的接触分力与总驱动力之间的静力学模型,通过ADAMS的动力学求解器对手指机构进行动力学计算。结果表明:设计的欠驱动手指机构包络抓取球形果实时运动确定,且能回到初始位置;ADAMS仿真结果和力学模型计算结果之间的3个接触分力误差分别为0.038、0.1251、0.0041N,验证了静力学模型的正确性,可以为手指机构的柔性抓取控制提供参考。
关键词:机械手;欠驱动手爪;结构设计;静力学分析;果实
0引言
欠驱动多指手是一种机器人末端执行器,属于多指手研究领域。拟人手抓取果实可以归结为采用多指手根据果实形状和大小等特征自适应抓取果实。但是,灵巧多指手一般结构复杂、价格昂贵、控制复杂,难以应用于果实采摘[1-2]。
欠驱动手指机构的力传动装置一般为串联多杆机构、腱驱动和人工肌肉[3-4]。日本学者[5-6]设计了一种采摘番茄的四指手柔性采摘装置,手掌均布4个相同的手指,每个手指具有4个指节,采用腱驱动和人工肌肉联合驱动;但该机构结构和控制复杂,难以推广应用。采用串联多杆机构的欠驱动手指结构紧凑、成本低、易控制,具有较好的物体形状自适应能力。浙江理工大学的武传宇[7]研制出一种依靠并联两套串联的四杆机构作为力传递机构的欠驱动采摘装置。该采摘装置由1个电机同时驱动3根手指,每根手指3根指节,每根指面均布置有橡胶垫层,用于避免抓取时对果实的损伤,并通过并联两套串联四杆机构来限制单根手指的3个自由度。但该装置在抓取果实时三指面并不能有效地顺序包络果实且对果实外形适应性较差,落果时三指节不能可靠的返回初始位置。
上述研究很少涉及欠驱动手指机构各手指接触力与总驱动力之间的静力学关系,而接触力过大会导致柔软物体的损伤。为了给类球形果实采摘机器人提供一种拟人手指的末端执行器,本文设计了一种连杆式联动的欠驱动手指机构,并利用虚功原理建立了手指在包络抓取物体时各指节与物体之间的接触分力与总驱动力之间的静力学关系模型,为手指机构的柔性抓取控制提供参考。
1结构设计与接触过程分析
如图1所示,此欠驱动手指机构有3个指节,在两个指节之间有旋转关节。由图1可知,手指由8个二副杆结构和1个滑块组成;3个串联的指节定义了手指的结构,其余的连接组成了转换装置。当滑块被驱动时,在中间传力机构的旋转副D和F处分别装有两个不同弹性系数的扭簧就会起作用。为了确保每个指节能够依次接触果实并且在包络式抓取果实之后能够回到初始位置,在每个指节处安装有限位块[8]。当直线步进电机驱动滑块运动时,从而推动手指机构去接触果实(见图2),近指节首先接触果实,由于近指节已经碰触到果实,所以可以将其视为固定构件。同理,随着直线步进电机的旋转,中指节和远指节依次碰触果实表面,此时机构短暂定型。最后,3个指节都碰触到果实表面以实现手指机构包络式抓取果实。
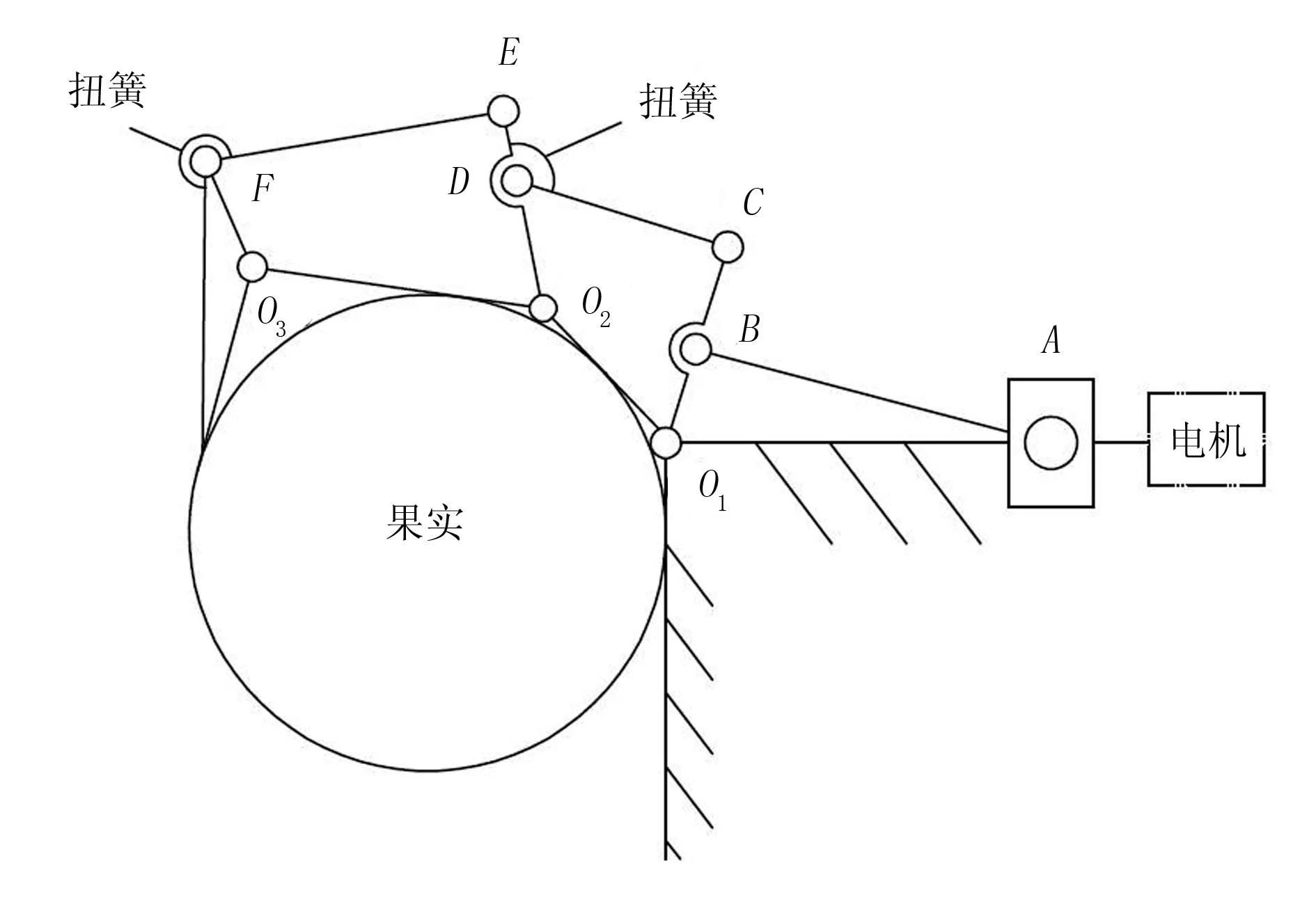
图1 欠驱动手指机构简图

(a) 初始位置 (b) 近指节触碰果实

(c) 中指节触碰果实 (d) 远指节触碰果实
2欠驱动手指的静力学分析
为了分析欠驱动手指机构的静力学特性,利用虚功原理建立手指在包络抓取物体时各指节与物体之间的接触分力与总驱动力之间的静力学关系模型。根据理论力学虚功原理可知,力在虚位移上所做的功叫做虚功。对于具有理想约束的质点系,其平衡的充要条件是作用在质点系的所有主动力在任何虚位移中所作用的虚功的和等于0[9-10],即
F1δ1+F2δ2+F3δ3=Fδ
(1)
其中,F1、F2、F3分别是每个指节在接触点A、B、C处产生的接触分力;F是驱动力;δ1、δ2、δ3是由F1、F2、F3沿接触点产生的虚位移;δ是F在沿滑块方向产生的虚位移,如图3所示。且有
δ1=d1φ3
δ2=d2φ2+a1φ3cos(α5-α2+α6)
δ3=d3φ1+a2φ2cos(γ+α8-α6-α5)+
a1φ3cos(γ+α8-α2)
由式(1)可得,δ可以写成
δ=Uφ1+Vφ2+Wφ3
(2)
其中,α1~α8分别为各杆件的水平转角;a1、a2、a3为三指节的长度;φ1、φ2和φ3为虚转角;d1、d2、d3为转动点到接触点的距离;ψ和θ分别为三指节之间的夹角;γ为远指节的不变角。
根据虚位移的约束条件,由驱动力的虚位移可以写为
(3)
A=l3d1d2sinα1sin(α7-α8)
B=l3a2d2sinα1sin(α5-α7)
C=l3a1b2sinα1sin(α2-α4)sin(α7-α6-β)
D=b1b2sin(α3-α1)sin(α7-α6-β)sin(α4-α3)
其中,l1、l2、l3为3个指节的长度,b1、b2为另外两个手指的长度。
比较式(2)和式(3),可以得到
(4a)
(4b)
(4c)
由式(4)可以推导出F1、F2、F3,有
(5a)
(5b)
(5c)
X1=Qa2d1cos(γ+α8-α6-α5)
X2=a2(Qd1-d2P)cos(γ+α8-α6-α5)
Y1=R[a2d1cos(γ+α8-α6-α5)-d2d3]
Y2=a1cos(γ+α8-α2)(Qd1-Pd2)
Y3=a1cos(α5-α2+α6)[a2d1cos(γ+α8-α6+α5)
-d2d3]
Z1=a2d1cos(γ+α8-α6-α5)-d2d3
由式(5)可以得出驱动力F和接触分力F1、F2和F3的关系。

(a) 各个接触分力以及水平转角
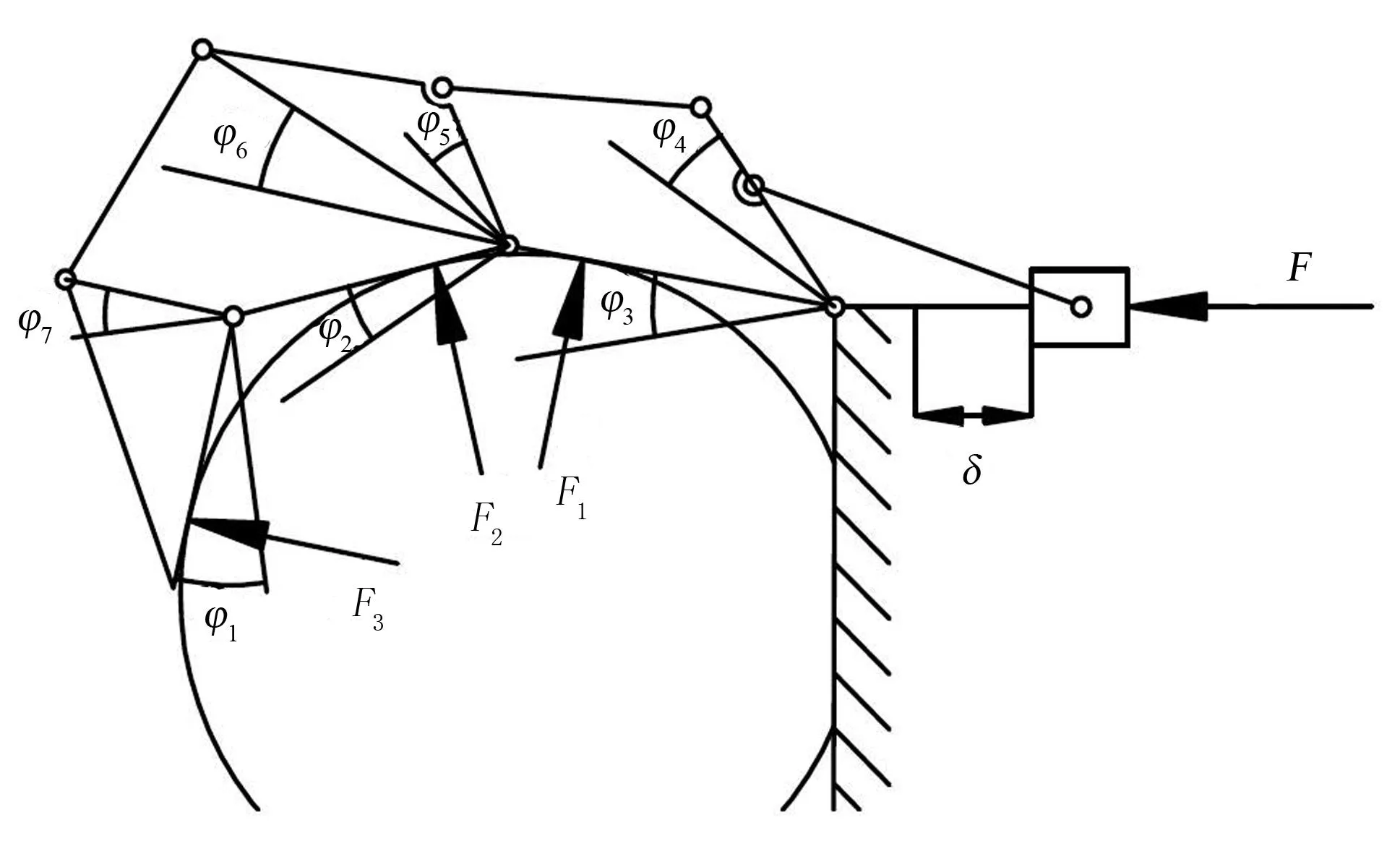
(b) 各个虚转角
3接触力仿真验证
现有将模型导入到ADAMS环境中,添加相应的运动副和碰撞等信息,如图4所示。将驱动力设置为45N,步进的速度设置为5.1mm/s。

(a) 初始抓取位置 (b) 近指节触碰果实

(c) 初始抓取位置 (d) 近指节触碰果实
由图4可以看出:近指节、中指节及远指节分别依次靠近并触碰果实表面,直到果实被整个手指包络为止,验证了此套方案的可行性与正确性。
3根手指节在抓取果实的过程中的受力情况(见图5)分别是近指节、中指节和远指节的手指受力曲线图。对3幅图进行分析可知:近指节受到力的最大值为12.318N,中指节为7.122 9N,远指节为24.530 9N。

(a) 近指节受力仿真曲线图

(b) 中指节受力仿真曲线图

(c) 远指节受力仿真曲线图
由图5可知:由于末端执行器的虚拟模型已经确定,所以一些固有的尺寸和角度也就确定了3个指节间的角度ψ和θ的变化分别从20.55°~24.37°,23.15°~43.75°。近指节的角度变化为:起13.39°,止44.07°。3个指节的角度变化差分别为4.18°、20.6°和30.68°。
将上述角度代入式(5),可得3个接触分力F1、F2、F3分别为12.356、7.284、24.535N。比较ADAMS仿真得到的数据和理论计算得到的数据,二者前后的误差为0.038、0.125、0.004 1N,其误差在可以接受的范围之内。所以,仿真结果验证了理论计算模型的正确性。
4结论
设计了一种欠驱动手指机构,利用虚功原理建立了手指在包络抓取物体时各指节与物体之间的接触分力与总驱动力之间的静力学模型,并通过ADAMS的动力学求解器对手指机构进行动力学计算。结果表明:ADAMS仿真结果和力学模型计算结果之间的3个接触分力误差分别为0.038、0.125 1、0.004 1N,验证了静力学模型的正确性,可以为手指机构的柔性抓取控制提供参考。
参考文献:
[1]田素博,邱立春,秦军伟,等.国内外采摘机器人机械手结构比较的研究[J].农机化研究,2007(3): 195-197.
[2]徐丽明,张铁中.果蔬果实收获机器人的研究现状及关键问题和对策[J].农业工程学报,2004(5): 38-42.
[3]Gosselin C, Angeles J. Singularity analysis of closed-loop kinematic chains[J].Robotics and Automation, IEEE Transactions on,1990, 6(3): 281-290.
[4]Gosselin L T. Underactuation in space robotic hands[J].International Symposium on Artficial Intelligence, Robotics and Automation in Space,2001, 21(18):320-326.
[5]Kondo N, Ting K C.Robotics for Plant Production[J].Artificial Intelligence Review,1998,6(11): 868-881.
[6]Monta M, Kondo N, Ting K C. End- effectors for tomato harvesting r obot [J].Artificial Intellig ence Review , 1998,12(1-3):11-25.
[7]李秦川,胡挺,武传宇,等.果蔬采摘机器人末端执行器研究综述[J].农业机械学报,2008(3): 175-179.
[8]刘伊威,金明河. DLR/HIT仿人机器人灵巧手的设计[J].机械制造,2006, 11(5): 23-25.
[9]哈尔滨工业大学理论力学教研室.理论力学[M].北京: 高等教育出版社, 2002: 343-345.
[10]乔锋华.基于欠驱动机构的机械手的研究[D].哈尔滨:哈尔滨工程大学, 2007.
A Type of Underactuated Finger Mechanism Design and Statics Analysis for Picking Fruit
Wang Tong, Yin Jianjun
(Key Laboratory of Modern Agricultural Equipment and Technology, Ministry of Education, Jiangsu University, Zhenjiang 212013, China)
Abstract:In order to provide a type of anthropopathic finger end-effector for fruit-picking robot, a type of underactuated finger mechanism was designed. The mechanism is set up three knuckle limiting stoppers and two different stiffness coefficient of torsional springs located between every two revolute pairs in middle transferring force mechanism, which aims to make three knuckles of underactuated finger mechanism rotate sequentially in the range of constrained degree of limiting stoppers. The configuration of underactuated finger mechanism can maintain stability and go back its initial position during the return stroke motion of knuckles when the mechanism envelops and grasps objects. Virtual work principle is used to build statics mathematical models between total driving force and contact forces generated by the knuckles and the object, and dynamics solver of Automatic Dynamic Analysis of Mechanical Systems (ADAMS) software is used to calculate force performance of the finger mechanism. The motion simulation shows that the designed mechanism can have determined motion and return its initial position in unfixed order. Three contact force errors between calculation result of statics mathematical models and simulation result of ADAMS solver are 0.038N, 0.1251N and 0.0041N respectively, which validates the correctness of statics mathematical models and make statics mathematical models provide a reference for flexible grip control of the underactuated finger mechanism.
Key words:manipulator underactuated hand; structure design; statics analysis
文章编号:1003-188X(2016)03-0110-05
中图分类号:S225;TP241.3
文献标识码:A
作者简介:王通(1989-),男,山东泰安人,硕士研究生,(E-mail)wt891102@163.com。通讯作者:尹建军(1973-),男,山西宁武人,研究员,博士,(E-mail)yinjianjun@ujs.edu.cn。
基金项目:国家自然科学基金项目(51475212);机械设计及理论浙江省重中之重学科和浙江理工大学重点实验室开放基金项目(ZSTUMD2012A001);苏高校优势学科建设工程资助项目(苏政办发〔2014〕37号)
收稿日期:2015-02-08
猜你喜欢
房地产导刊(2022年5期)2022-06-01
建材发展导向(2021年13期)2021-07-28
制造技术与机床(2018年11期)2018-11-23
河北农机(2017年12期)2018-01-20
制造技术与机床(2017年4期)2017-06-22
江苏农业科学(2016年8期)2017-02-15
天津农业科学(2016年12期)2017-01-11
通信电源技术(2016年1期)2016-04-16
中国房地产业(2016年2期)2016-03-01
中国房地产业(2016年24期)2016-02-16