
基于Creo Parametric的新型防堵装置运动仿真
2016-03-23 04:25卢彩云孟志军武广伟李立伟
农机化研究 2016年8期
关键词:运动仿真
卢彩云,孟志军,王 秀,武广伟,李立伟
(1. 北京农业智能装备技术研究中心,北京 100097;2.国家农业智能装备工程技术研究中心,北京 100097;3.农业智能装备技术北京市重点实验室,北京 100097;4.农业部农业信息技术重点实验室,北京100097;5.北京农业信息技术研究中心,北京 100097)
基于Creo Parametric的新型防堵装置运动仿真
卢彩云1,2,3,4,5,孟志军1,2,3,4,王秀1,2,3,4,武广伟1,2,3,4,李立伟1,2,3,4
(1. 北京农业智能装备技术研究中心,北京100097;2.国家农业智能装备工程技术研究中心,北京100097;3.农业智能装备技术北京市重点实验室,北京100097;4.农业部农业信息技术重点实验室,北京100097;5.北京农业信息技术研究中心,北京100097)
摘要:结合被动式防堵装置和动力驱动式防堵装置的优缺点,开发了一种新型的滑板压秆旋切式防堵装置,并分析了该防堵装置的结构和工作原理。同时,采用Creo Parametric软件建立了三维几何模型,并通过Creo Parametric软件的机构模块对关键部件进行了干涉和运动仿真分析。通过分析确保该装置各部件之间不存在干涉,并得到其关键部件旋切平面刀端点的速度、速度X方向分量、速度Y方向分量及加速度、加速度X方向分量和加速度Y方向分量随时间的变化规律,旨在为滑板压秆旋切式防堵装置的结构优化提供科学依据。
关键词:滑板压秆旋切式防堵装置;干涉分析;运动仿真;Creo Parametric
0引言
小麦和玉米是华北一年两熟区的主要粮食作物,6月份小麦收获后播种玉米,10月份玉米收获后播种小麦,作物产量高、秸秆量大,耕地休闲期短。进行免耕作业时,由于大量秸秆的存在,必须采用合适的防堵装置[1-5]对秸秆进行处理,才能保证开沟器顺利通过而避免堵塞。目前,免耕防堵装置主要有被动式防堵装置和动力驱动式防堵装置两种。被动式防堵装置主要用于处理秸秆量比较小的地块,典型的有免耕播种机弹齿式防堵装置[6]、少耕覆盖播种机[7]、多梁式高地隙小麦免耕播种机[8]及齿轮拨草型免耕覆盖精播机[9];动力驱动式防堵装置主要用于处理秸秆量较大的地块,如动力甩刀式免耕播种机[10]、免耕播种机组合型锯切防堵装置[11]、带状粉碎免耕播种机[12]及斜置驱动圆盘免耕防堵装置[13]等。被动式防堵装置结构简单,但防堵能力有限;动力驱动式防堵装置防堵能力强,但刀轴转速高,机器振动噪音大,安全性能差。
滑板压秆旋切式防堵装置[14-15]是结合被动式防堵装置和动力驱动式防堵装置的优点开发的一种新型的防堵装置。该装置采用支撑切割方式切断秸秆,刀具切割速度小、功耗低。为探讨该装置各组成部件运动规律,采用Creo Parametric软件对滑板压秆旋切式防堵装置关键部件进行三维建模,并采用Creo Parametric软件的机构模块进行运动仿真分析;在检测装置是否干涉的同时,可以直观、形象地观测和分析各部件运动,为进一步优化装置参数提供理论参考。
1结构及工作原理
滑板压秆旋切式防堵装置主要由机架、齿轮箱、三点悬挂、旋转轴、旋切平面刀、滑板、刀辊、固定座、转动块和弹簧限位杆等组成,如图1所示。

1.三点悬挂装置 2.机架 3.旋转轴 4.滑板
工作原理是:旋切平面刀高速旋转至秸秆处时切割秸秆,此时滑板压住秸秆,形成有支撑切割。切割完成后,旋切平面刀继续旋转,此时由于滑板有向下压的作用,秸秆无法随旋切平面刀向后上方飞溅,但存在向后上方运动的趋势;在秸秆重力作用下,秸秆慢慢回落至地面,然后沿滑板与土壤之间的空隙流向后方。该装置的关键部件是旋切平面刀和滑板。
2运动仿真及结果分析
采用Creo Parametric对滑板压秆旋切式防堵装置进行三维实体模型,然后导入机构模块中进行运动仿真,能够检测出各部件之间是否存在干涉,并可通过模拟关键部件的运动,研究关键部件上作用点的运动轨迹及在不同时刻的位置、速度、加速度等参数。在Creo Parametric中进行运动仿真流程如图2所示。

图2 在Creo Parametric中运动仿真流程图
2.1 几何建模
根据滑板压秆旋切式防堵装置各部分具体结构尺寸,按照1:1的比例分别用Creo Parametric建立三维实体部件图,然后根据各部件之间连接关系进行装配,如图3所示。
保护性耕作要求尽量减少耕作,因此选择旋切平面刀作为秸秆切割部件。旋切平面刀切削面结构采用阿基米德螺旋线。旋切平面刀侧切刃曲线的极坐标方程为
Rn=R0+kθ(θmin≤θ≤θmax)
(1)
式中Rn—旋切平面刀任意点回转半径(mm);
R0—侧切刃起点的回转半径(mm);
k—极角每增加1rad回转半径的增量(mm);
θ—侧切刃上任意点的极角(rad);
θmax—最大回转半径对应的极角(rad);
θmin—最小回转半径对应的极角(rad)。
正切刃曲线方程为
(2)
式中R1—侧切刃最大回转半径(mm);
φ—正切刃上任意点的极角(rad);
φmax—正切刃上最大回转半径对应的极角(rad);
β—弯折角(rad)。
根据田间试验条件,选择旋切平面刀的回转半径为225mm,由公式(1)和公式(2)建立旋切平面刀模型。
滑板由弧形板和平面板两部分组成。其中,滑板几何参数包括弧形板与水平面夹角、平板长度、滑板厚度和宽度等,根据小麦播种行距及与旋切平面刀相对位置等条件确定。

图3 滑板压秆旋切式防堵装置三维实体模型
2.2 运动建模
将滑板压秆旋切式防堵装置三维实体模型导入Creo Parametric机构模块中。在Creo Parametric机构模块中对旋切平面刀的运动仿真主要通过以下几个步骤进行:①单击齿轮,分别建立齿轮箱输入轴与输出轴、齿轮箱输出轴与刀轴之间的啮合关系,为使运动结构简单,此处设置各齿轮齿数相同。②单击伺服电动机,选取齿轮箱输入轴为运动轴,定义电动机转速为320r/min,即旋切平面刀的旋转速度。③单击机构分析,对旋切平面刀进行运动分析,类型选择运动学,设定好运行时间点击运行即可看到旋切平面刀的运动过程,并保存运行结果。④单击回放,选择碰撞检测设置的全局碰撞检测,并选择碰撞时铃声警告和碰撞时停止动画回放,点击确定并运行即可检测部件之间是否存在干涉。若存在干涉,可根据提示对装置结构进行改善,直至干涉完全消除。⑤在保证装置各部件之间无干涉的基础上,单击生成分析的测量结果,选择装置任意点可对该点进行位置、速度、加速度等信息的测量并输出分析结果。
2.3 结果分析
1)干涉检测过程中,没有发出铃声警告,且没有停止动画回放,表明该装置各部件之间不存在干涉,结构设置合理。
2)对旋切平面刀的端点进行测量得到其3s内的速度-时间、速度x方向-时间、速度y方向-时间、加速度-时间、加速度x方向-时间和加速度y方向-时间的特性曲线,如图4~图9所示。
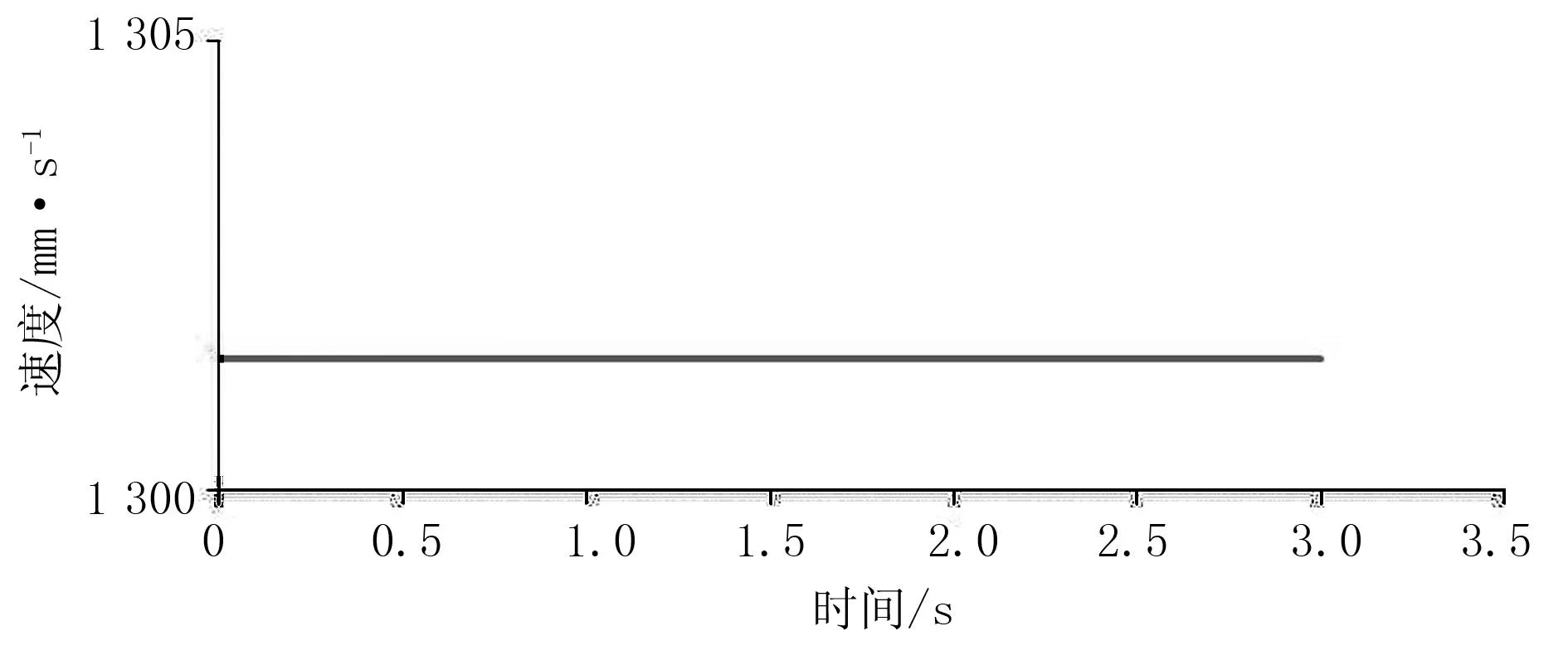
图4 速度-时间特性曲线

图5 速度x方向-时间特性曲线
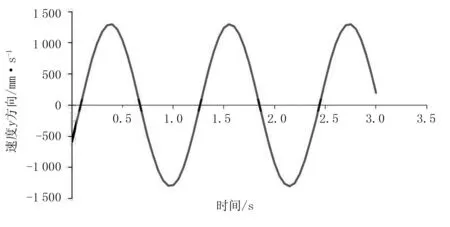
图6 速度y方向-时间特性曲线
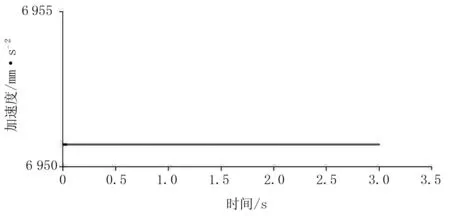
图7 加速度-时间特性曲线

图8 加速度x方向-时间特性曲线

图9 加速度y方向-时间特性曲线
由图4~图6可以看出:旋切平面刀端点速度在x方向、y方向的分量与时间呈正弦分布,而总速度为恒定值。由图7~图9可以看出:旋切平面刀端点加速度在x方向、y方向的分量也与时间呈正弦分布,其加速度为恒定值。对旋转部件的理论分析可知,以上结果是合理的。通过Creo Parametric进行运动分析,可以检测出研究对象之间是否存在干涉,而且能够直观形象地获得研究对象的运动参数和变化趋势,为研究对象的设计提供理论依据。
3结论
1) 对滑板压秆旋切式防堵装置进行设计,并根据旋切平面刀和滑板的几何参数,利用Creo Parametric软件建立了滑板压秆旋切式防堵装置三维几何模型。
2) 应用Creo Parametric软件的机构模块对滑板压秆旋切式防堵装置进行运动仿真,干涉分析结果表明:各部件之间不存在干涉,结构设置合理。
3) 运动仿真同时得到了转速320r/min时旋切平面刀端点的速度、速度X方向分量、速度Y方向分量及加速度、加速度X方向分量和加速度Y方向分量随时间的变化规律。
参考文献:
[1]张喜瑞,李洪文,何进,等.小麦免耕播种机防堵装置性能对比试验[J].农业机械学报,2010,41(2):73-77.
[2]王汉羊,陈海涛,纪文义.2BMFJ-3型麦茬地免耕精播机防堵装置[J].农业机械学报,2013,44(4):64-70.
[3]范旭辉,贾洪雷,张伟汉,等.免耕播种机仿形爪式防堵清茬机构参数分析[J].农业机械学报,2011,42(10):56-60.
[4]高娜娜,张东兴,杨丽,等.玉米免耕播种机滚筒式防堵机构的设计与试验[J].农业工程学报,2012,28(12):31-38.
[5]Brandelero EM,de Araujo AG,Ralisch R. Soil mobilization and seeding depth by no-till seeder mechanisms for residue management[J]. Engenharia Agricola,2014,34(2):263-272.
[6]赵武云,张锋伟,吴劲锋,等.免耕播种机弹齿式防堵装置[J] .农业机械学报,2007,38(3):188-190.
[7]刘应回,费国胜.少耕覆盖播种机:中国,CN01222698.X[P].2002-04-10.
[8]高焕文,李洪文,姚宗路.轻型高防堵性能免耕播种机研究[J].中国工程科学,2007(9):15-20.
[9]陈君达,李洪文,高焕文.玉米免耕整秆覆盖播种机的防堵装置[J].北京农业工程大学学报,1994,14(3):34-39.
[10]何进,李洪文,王庆杰,等.动力甩刀式小麦固定垄免耕播种机[J]农业机械学报,2011,42(10):51-55.
[11]高焕文,廖庆喜,李洪文.免耕播种机组合型锯切防堵装置:中国,CN03264397.7[P].2004-08-04.
[12]张晋国.带状粉碎免耕播种机的试验研究[D].北京:中国农业大学,2001.
[13]马洪亮.免耕播种机玉米秸秆根茬切断装置的研究[D].北京:中国农业大学,2006.
[14]卢彩云,李洪文,何进,等.小麦免耕播种机浮动支撑式防堵装置[J].农业机械学报,2013,44(12):52-55,153.
[15]卢彩云,何进,李洪文,等.基于有支撑切割原理的免耕防堵装置有限元分析[J].农业机械学报,2013,44(S1):61-66.
Motion Simulation Analysis on New Anti-blocking Device Based on Creo Parametric
Lu Caiyun1,2,3,4, Meng Zhijun1,2,3,4, Wang Xiu1,2,3,4, Wu Guangwei1,2,3,4, Li Liwei1,2,3,4
(1. Beijing Research Center of Intelligent Equipment for Agriculture, Beijing Academy of Agriculture and Forestry Sciences, Beijing 100097, China; 2. National Research Center of Intelligent Equipment for Agriculture, Beijing 100097, China; 3. Beijing Key Laboratory of Intelligent Agricultural Equipment and Technology, Beijing 100097, China; 4. Key Laboratory of Agr-Informatics, Ministry of Agriculture, P. R. China, Beijing 100097, China; 5.Beijing Research Centor for Information Technology in Agriculture, Beijing 100097, China)
Abstract:An anti-blocking device of rotary cutting with slide plate pressing straw for no-till planter was designed based on the characteristics of passive and active anti-blocking devices, and the structure and working principle was analyzed. Three-dimensional model of the anti-blocking device was established by Creo Parametric, and analysis of interference and motion were carried out in the mechanism module of Creo Parametric. There was no interference in the anti-blocking device by analysis, and the endpoint motion of rotary blade, such as the speed, the speed in X-direction, the speed in Y-direction, acceleration, the acceleration in X-direction, the acceleration in Y-direction were obtained, which provides scientific basis for structural improvement of Anti-blocking Device of Rotary Cutting with Slide Plate Pressing Straw.
Key words:anti-blocking device of rotary cutting with slide plate pressing straw; interference analysis; motion analysis; Creo Parametric
中图分类号:S222.2
文献标识码:A
文章编号:1003-188X(2016)08-0060-04
作者简介:卢彩云(1986-),女,河北沧州人,博士,博士后,(E-mail)lucy@nercita.org.cn。通讯作者:孟志军(1975-),男,河南信阳人,研究员,博士。
基金项目:农业部“948计划”项目(2011-G32[5]);北京市农林科学院博士后基金项目(2014002)
收稿日期:2015-09-01
猜你喜欢
科技创新与应用(2017年6期)2017-03-23
山东工业技术(2017年3期)2017-03-16
教育教学论坛(2016年52期)2017-03-12
汽车科技(2016年6期)2016-12-19
科技视界(2016年17期)2016-07-15
科技视界(2016年10期)2016-04-26
现代电子技术(2015年8期)2015-07-09
