
一器多行环槽推送式排种器的优化设计及研究
2016-03-23 04:25叶大明曹成茂
农机化研究 2016年8期
叶大明,曹成茂,丁 冉,詹 超
( 安徽农业大学 工学院,合肥 230036 )
一器多行环槽推送式排种器的优化设计及研究
叶大明,曹成茂,丁冉,詹超
( 安徽农业大学 工学院,合肥230036 )
摘要:设计了一种适用于水稻穴直播的一器多行环槽推送式排种器,分析了排种器的工作原理和种子在出种口的受力及运动情况,对排种器的清种和护种结构进行了合理的设计,并对精播条件进行了理论计算,推算出排种盘的理论最大转速。在结合农艺对播种穴距要求的基础上,设计了穴距可调机构,改变不同齿轮啮合得到不同传动比,进而实现播种的穴距可在一定范围内可调节,并通过pro/E对穴距可调结构进行了运动学仿真分析。结果表明:穴距可调机构传动比符合理论传动比要求,穴距可调范围合理,排种器工作可靠。
关键词:排种器;精播;穴距可调;Pro/E运动学仿真
0引言
我国是世界上的农业大国,在农业种植过程中播种机是非常重要的装备。其与传统种植模式相比,机械化直播省去了育苗、移栽等繁琐工序,大大提高了播种效率。而排种器是播种机的关键部件,排种器的护种、清种和排种精确能力是衡量其作业质量的主要指标,其设计是否合理将直接影响农作物种植质量及成本[1-2]。传统排种器大多是一器单行式,要完成多行播种时播种机上需要安装多个排种器,导致播种机结构复杂,排种均匀性和稳定性不高,排种器在排种过程中很容易产生卡种、伤种、漏播等问题。这些问题一直没有被很好地重视和解决,在一定程度上影响了播种机的发展[3-4]。穴距涉及到播种量和大田基本苗数,对确保直播水稻通风采光的优点发挥有重要的作用。传统排种器自身不具有穴距可调机构,要完成穴距可调播种作业需要依靠改变牵引机械的速度来实现[5-6]。针对以上情况,本文设计了一种自带穴距可调装置的一器多行环槽推送式排种器,可提高精播效率。
1总体结构及工作原理
1.1 总体结构
该排种器为圆盘环槽式排种器,主要由种箱、分流瓦片、排种盘、清种刷、排种器底盘、排种管、调速装置、传动轴、换向锥齿轮齿轮、动力轴等构成,如图1所示。

图1 排种器总体结构图
排种器种箱内有柱椎形分流瓦片,可实现8个区同时进行分流充种。种箱下面是圆环状的排种盘,排种盘边缘均匀分布8个种槽,每个种槽两内侧壁分别以螺钉方式安装有软质毛刷,用来清种和护种。排种盘镶嵌在底盘中,初始状态是排种盘上的8个种槽与底盘上的8个排种孔是相互错开的,形成充种区。随着传动轴的转动,排种盘在底盘中做旋转运动,当种槽与底盘落种口错开时,处于充种状态;当种槽与底盘落种口重合时,处于排种状态。底盘底面边缘对应开有8个排种口,每一个排种口处都安装了排种管,同时排种底盘上加载了穴距可调装置;通过调节输入轴上的齿轮与输出轴上的不同齿轮进行啮合传动改变输出轴的转速,进而实现速度可调。排种器通过1对换向锥齿轮能够很好地解决排种器的位置安装和动力传递。
1.2 工作原理
排种器工作时,种箱中的种子通过分流瓦片将种子分别分流到8个不同的充种区,通过输出轴的旋转带动排种盘在排种器底盘中携带种子做旋转运动,通过种槽中软质毛刷的推送作用将种子推送到排种器底盘的落种口处;排种器底盘落种口两端呈斜坡状,避免了排种盘与底盘的刚性接触造成伤种,同时斜坡上多余的种子会由软质毛刷沿着倾斜面将其扫下,其余种子在自身重力的作用下落入输种管,进行多行作业。
2清种和护种装置
2.1 排种盘及底盘清种和护种装置
排种盘是排种器的核心零部件之一,排种盘的形状和结构参数是实现精播的重要条件[2]。排种盘为圆环状,排种盘环形边缘处开有8个种槽,每个槽对应1行的排种;该排种盘1次播8行,每个槽的两内侧壁上都分别以螺钉的方式安装了软质毛刷,毛刷与排种器底盘上表面为柔性接触,避免了种子与侧壁的刚性接触。排种盘及底盘结构示意图如图2和图3所示。

1.传动轴孔 2.种槽 3.软毛刷

1.传动轴孔 2.落种口
排种器底盘上8个落种口,两侧呈倾斜角度为30°的斜坡形。当种子开始进入落种口处时,大部分种子会做自由落体或平抛运动从落种口落下,少许种子沿着斜坡在软质毛刷的推送下相继从落种口落下,从而避免了种子与排种盘的刚性接触,起到了良好的护种作用。排种器排种过程中清种和护种原理如图4所示。

1.排种盘 2.软质毛刷 3.种子 4.排种器底盘
2.2 精播理论分析
精量播种不仅对排种器的结构设计有所要求,对排种盘的转速也一定的要求,转速过大或过小都将直接影响充种性能、投种粒数及位置的精准度[7-8]。排种器在排种过程中,排种盘的转速n是一定的,种子在排种盘推送的作用下相继进入落种口。为了使确定数量的种子能够完全从落种口落下,要求排种盘最大转速不能超过某一临界值,这是保证能够实现精播的必要条件。
种子经毛刷推送至落种口处存在3种落种状态[9-11]:①种子沿斜坡滑落至落种口;②种子做自由落体落入排种口;③种子在毛刷推送作用下做平抛运动。其落种示意图如图5所示。

图5 种子落种状态示意图
针对上述3种情况种子的受力分析如下:
1)当种子沿斜坡滑落时,种子受到自身重力为
G=mg
(1)
斜坡对种子的法向支撑力FN为
FN=mgcosθ
(2)
斜坡对种子的切向摩擦力为
f=μFN
(3)
对种子进行受力分析,可得
mgsinθ-f=ma
(4)
f=μFN
(5)
2)当种子做自由落体进入落种口时,种子只受自身重力作用,则有
G=mg
(6)
3)当种子做平抛运动时,种子在竖直方向也只受自身重力作用,则有
G=mg
(7)
式中m—种子质量(kg);
g—重力加速度(m/s2);
μ—种子与斜坡面之间的滑动摩擦因数;
θ—斜坡面与水平面之间夹角(°)。
设上述3种落种状态从种子进入落种口开始到种子几何中心低于落种口上端所需时间分别为t1、t2、t3,分别对种子在3种状态时的运动进行分析可得:第1种状态下,种子由排种盘将种子推送到落种口处种子将沿落种口处的斜坡下滑至落种口底端;第2种状态下,种子由排种盘推送到落种口处,种子将做平抛运动落至落种口底端;第3种状态下,种子将在落种口处做自由落体运动,从而落至排种口底端。由以上分析可得
(8)
H=l1+l2
(9)
(10)
(11)
(12)
ω=2πn
(13)
(14)
式中s—斜坡长度(m);
a—种子沿斜坡下滑加速度(m/s2);
φ—落种口对应的弧度(rad);
ω—排种盘的角速度(rad/s);
总之,在实际的教学过程中,教师们需要不断思考如何提高课堂教学的效率,努力探索提高教学质量的方法,课前充分的准备,备实、备精课程,课堂激发学生的学习兴趣,分配好课堂教学的时间,让教师的教学更具有实用性和艺术性。初升的太阳,每天只有一次,含苞的花朵,每年只有一次,而我们的青春,人生只有一次,让我们一起珍惜青春,在这最有作为的时刻,让有效教学的信念深深扎根在我们的心里,去谱写出我们教育人生最美妙的篇章。
g—重力加速度(m/s2);
l1—排种盘种槽高度(m);
l2—斜坡高度(m);
n—排种盘的转速(r/s);
θ—斜坡面与水平面之间夹角(°)。
排种器要实现精播,必须要求每个种槽中的种子全部排出落种口,这就要求每个种槽中所有种子落至排种口下端的时间小于1排种盘转过1个出种口长度所需要的时间,即
t1≤t且t2≤t且t3≤t
(15)
根据前面对种子受力分析及运动学分析,整理得
(16)
(17)
(18)
(19)
(20)
(21)
由式(19)、式(20)可知:排种器若能正常排种实现精播,排种盘的理论最大转速主要与出种口所对应的弧度φ、种槽的高度l1、斜坡高度l2、斜坡倾斜度θ有关。本文排种器出种口所对应的弧度为φ=0.384rad(22°),种槽的高度为l1=0.016m,斜坡高度l2=0.005m,斜坡倾斜角θ=30°。取种子与种槽内壁之间的滑动摩擦因数u=0.5[12],种子重力加速度取g=9.8m/s2,代入式(20 ) 、(21)得:n1≤0.689r/s,n2≤0.923r/s,n3≤0.923r/s。
由于排种盘转过一个出种口的时间不能小于最后落种的时间,所以排种盘的转速取3者中最小值,即排种盘的理论最大转速为0.689r/s。
3穴距可调机构
种苗的通风和采光是否充分主要取决于种苗之间的穴距,穴距大小将直接影响种苗的生长特性[5-6]。此次设计的排种器自带穴距可调装置,该机构通过螺钉与排种器底盘进行连接,输出轴带动排种盘旋转,穴距可调装置为6速可调;通过调速把手可调节输入轴与输出轴上不同齿轮啮合,在张紧弹簧的作用下可得到不同的传动比,进而实现排种的穴距可调;输出轴通过锥齿轮啮合由主传动轴提供动力,其结构示意图如图6所示。

1.调速把手 2.动力输入轴 3.弹簧 4.机壳 5.主传动齿轮
穴距可调装置调速原理图如图7所示。
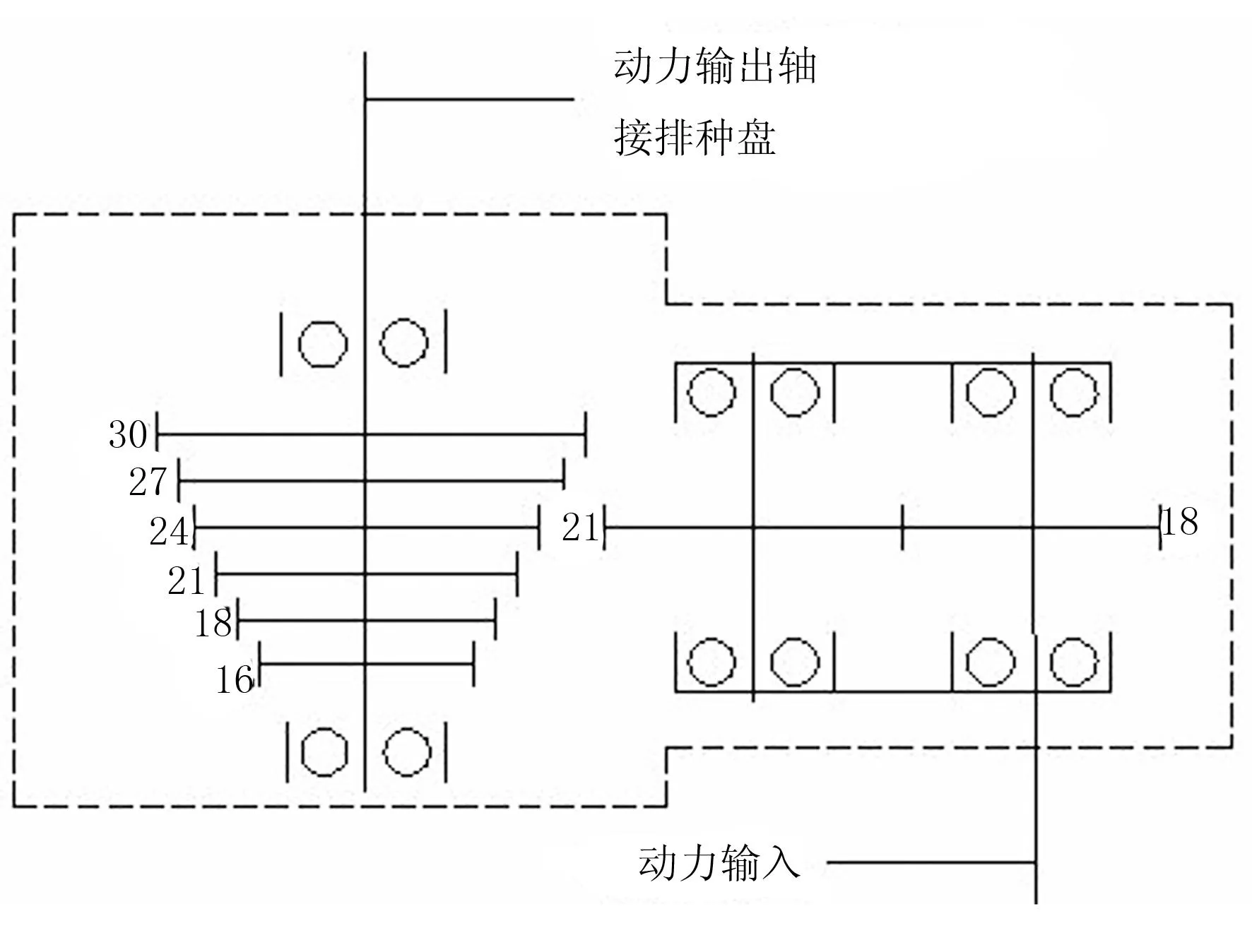
图7 排种器调速机构原理图
调速的原理在于排种器输出轴上的齿轮组,动力输入轴与输出轴齿轮组上的不同齿轮啮合,就可以得到不同的传动比,从而控制排种器输出轴的转速起到调速的目的。根据调速装置传动原理图中齿轮的齿数,可以计算排种器动力输入轴和输出轴之间的传动比i的最大值和最小值,进而得到传动比i值的范围。设传动比最大值为imax,最小值为imin,则
由此可得,排种器动力输入轴和输出轴之间的传动比i值的范围为0.89~1.67。
4Pro/E在调速机构中的应用
Pro/E的运动学仿真是通过对机构添加运动副及驱动器,使其运动, 以实现机构的动态模拟。针对需要了解的参数可以定义模拟测量, 从而获得参数的变化曲线[13-14]。
4.1 机构模型建立
先将首机架以缺省形式固定,然后依次装配调速机构子组件、排种盘、动力传递齿轮和种箱。其中,调速机构输出轴与排种盘以销钉形式连接,输入轴上的锥齿轮与动力轴上的锥齿轮以齿轮副连接。装配连接的模型如图8所示。

图8 连接后的组件模型
4.2 添加伺服电机
伺服电动机是组件运动学分析的动力源, 可以为连接接头设定各种位置、速度和加速度, 使机构以某种特定的方式运动。伺服电动机施加位置、速度和加速度的方式是通过时间函数的形式来表达的, 通过定义时间函数(如常数、线性函数、自定义函数等),可以得出每一时间各个主体的位置(轮廓)。进入应用程序中机构模块, 在动力输入轴上添加一台伺服电动机, 将它的运动方向设置成逆时针旋转。伺服电机的速度大小设为常数, 模数A=3 600°/s。
4.3 执行运动学仿真及仿真结果
定义运动学分析, 可以计算机构运动过程中主体的各种运动特性。设置分析的总时间为10s,分别仿真6组不同齿轮啮合时排种盘的位置和速度,结果如图9和图10所示。
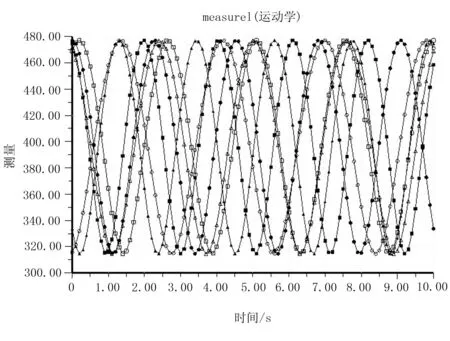
图9 排种盘的位置曲线

图10 排种盘的速度曲线

5结论
1)通过对排种器清种和护种结构进行合理的优化设计,使得种子在排种槽中的刚性接触转变为柔性接触;同时,落种口斜坡形的特殊结构使得多余的种子被毛刷扫走,有效地解决了排种过程中伤种和卡种的现象。
2)通过Pro/E对穴距可调机构运动特性进行了分析, 并获得所需要的运动学参数, 避免了复杂的计算, 使得在二维图纸上难以表达和设计的运动变得直观和易于修改。通过对机构运动过程的模拟, 可以观察到运动轨迹、位移,以及是否存在干涉现象, 便于工艺参数的修改和机构的优化,验证穴距可调机构的可靠性。
参考文献:
[1]王业成,邱立春,张文娇,等. 摩擦型立式圆盘精密排种器的设计与试验[J].农业工程学报, 2012, 28( 1):22 - 26.
[2]廖庆喜,高焕文,臧英.玉米水平圆盘精密排种器型孔的研究[J].农业工程学报,2003,19(2):109-113.
[3]俞亚新,赵匀,张斌.水稻播种机的研究现状与展望[J].农机化研究, 2007(9):5- 8.
[4]李志伟, 邵耀坚.电磁振动式水稻穴盘精量播种机的设计与试验[J].农业机械学报, 2000, 31(5):32-34.
[5]李国林,宋炜,毛俐,等.国内外几种主要排种器的特点[J].农业科技与装备,2011(8):70-73.
[6]李顺,马荣朝,古强,等.水稻播种机排种装置的设计[J].农机化研究,2012,34(9):135-138.
[7]王冲,宋建农,王继承,等.穴孔式水稻排种器投种过程分析[J].农业机械学报,2010,41(8):39-42.
[8]廖庆喜,黄吉星,刘光,等.油菜播种机槽孔轮式精量排种器设计与试验[J].农业机械学报, 2011,42(2) : 63-66.
[9]梁宝忠,赵永亮,赵金英,等.水稻直播机设计与试验[J].农业机械学报,2012(S1):63-66.
[10]夏连明,王相友,耿端阳,等.丸粒化玉米种子精密排种器[J].农业机械学报, 2011, 42(6) : 53-57.
[11]王冲,宋建农,王继承,等.穴孔式水稻排种器投种过程分析[J].农业机械学报,2010,41(8):39-42.
[12]程绪铎,陆琳琳,石翠霞.小麦摩擦特性的试验研究[J].中国粮油学报, 2012, 27(4):15-19.
[13]郭仁生.基于MATLAB和Pro/ENG INEER优化设计实例解析[M].北京: 机械工业出版社,2007.
[14]高秀华.机械三维动态设计仿真技术[M].北京:化学工业出版社,2003.
Abstract ID:1003-188X(2016)10-0036-EA
Design and Research of Multi-line Metering Device with Ring Groove Push Movement
Ye Daming, Cao Chengmao, Ding Ran, Zhan Chao
(College of Engineering,Anhui Agricultural University,Hefei 230036,China)
Abstract:A multi-line metering device was designed for hill-drop of rice with ring groove push movement. Working principle of the multi-line metering device and force on dropping seed were analyzed, improvement design of structure for cleaning and protecting seeds were made, and the theoretical maximum speed of the metering plate was investigated by theoretical calculation of precision sowing condition. On the base of agronomic requirement for hole distance, a hole space adjustable mechanism was designed. It’s change gears engagement to obtain different transmission ratio and realized the sowing distance adjustable under the certain range. Kinematics simulation analysis for the hole space adjustable mechanism was made on the base of Pro/E, the results showed that the transmission ratio can meet the theoretical request, the adjustable range of hole distance is rational and device working stable and performance well.
Key words:seed-metering device; precision seeding; hole space adjustable; kinematics simulation of Pro/E
中图分类号:S223.2;S220.3
文献标识码:A
文章编号:1003-188X(2016)08-0036-05
作者简介:叶大明(1989-),男,安徽六安人,硕士研究生,(E-mail)12646423@qq.com。通讯作者:曹成茂(1964-),男,安徽六安人,教授,硕士生导师,博士,(E-mail)caochengmao@sina.com。
基金项目:“十二五”国家科技支撑计划项目(2012BAD14B13)
收稿日期:2015-08-03
