
树冠振动式核桃采收装置的设计与分析
2016-03-23 04:25王真真李成松朱兴亮王丽红
农机化研究 2016年8期
关键词:核桃
王真真,坎 杂,付 威,李成松,朱兴亮,王丽红
(石河子大学 机械电气工程学院,新疆 石河子 832000)
树冠振动式核桃采收装置的设计与分析
王真真,坎杂,付威,李成松,朱兴亮,王丽红
(石河子大学 机械电气工程学院,新疆 石河子832000)
摘要:为提高核桃采收效率、降低果树损伤,针对新疆核桃种植模式,设计了树冠振动式核桃采收装置。该装置通过拨杆圆盘的直线往复运动产生的激振力实现核桃振动采收。通过对曲柄滑块总成进行运动分析,推导出了滑块速度和加速度的表达式,并对装置产生的激振力进行求解,得出振动频率为2Hz时装置对核桃最大激振力为134N,验证了该装置进行采收作业的可行性。同时,对采收装置进行惯性力分析,推导出了不同组数曲柄滑块总成的合力表达式,得出了该装置所受惯性力最大为8.69N,为新疆核桃收获机的进一步研究提供了理论基础。
关键词:核桃;树冠振动;采收装置;曲柄滑块
0引言
核桃是我国广泛种植的特色坚果之一,其种植面积、产量均居世界第一。新疆是我国核桃生产的第二大省[1],2014年新疆核桃种植面积突破30万hm2,主要分布在阿克苏、喀什及和田地区。目前,新疆核桃普遍采用人工采收,成本高、效率低,人工采收占果园生产过程总用工量的50%左右[2],适时采收能够降低核桃霉菌感染的几率,提高果品质量[3],有利于核桃产业的健康、稳定发展。
核桃采收机械主要采用树干振动采收方式。根据树干振动特点可分为抱摇式树干振动[4]和撞击式树干振动[5]。由于树干长势倾斜和夹持位置不紧固,抱摇式树干振动会造成树干夹持处表皮损伤,撞击式树干振动采收机的撞击部件连续击树干,在树干撞击位置出现撞击损伤,同时会造成核桃树根部损伤。
通过上述分析,本文提出一种基于树冠振动式的核桃采收装置,旨在降低果树损伤,提高采收效率。
1装置结构及工作原理
1.1 装置结构
采收装置主要由液压马达、联轴器、机架、曲轴主轴、曲柄滑块总成等组成,如图1所示。其中,曲柄滑块总成与机架采用螺栓固定,曲轴主轴之间通过链式联轴器连接。
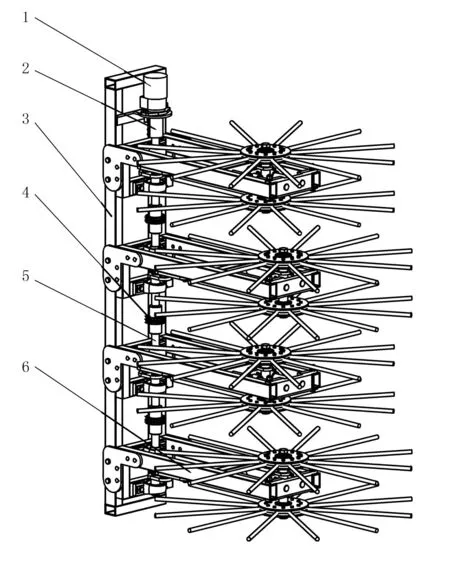
1.液压马达 2.联轴器 3.机架
曲柄滑块总成主要由曲轴导轨组、拨杆圆盘、导轨架等组成,如图2所示。每个曲柄滑块总成由1个曲轴导轨组和2个拨杆圆盘组成。拨杆圆盘绕轴向随动,降低拨杆对树枝损伤。
1.2 工作原理
工作时,液压马达驱动曲柄滑块机构实现拨杆圆盘的直线往复运动;拨杆击打树枝时,核桃产生的惯性力大于其果柄拉断力时,核桃掉落,实现核桃采收。本装置拨杆圆盘受到树枝阻力后能够转动,实现了主动振打与被动旋转相结合,能够有效降低采收过程中核桃树枝的损伤。

1.拨杆圆盘 2.导轨架 3.曲轴导轨组
2关键部件结构设计
2.1 曲轴导轨组设计
曲轴导轨组是振动采收装置的核心部件(见图3),主要由曲轴主轴、曲柄板、连杆、连接杆、平行导轨及圆盘轴等组成。曲轴安装在导轨架的后端,曲轴主轴与曲柄板固结在一起,曲柄板决定采收装置的振幅,选取曲柄板长度为50mm。连杆的一端与曲轴铰接,另一端与连接杆铰接,连接杆用于调整固定板与连杆的距离,本装置连杆长度取为120mm。圆盘轴、连接杆与直线轴承固接为一体,直线轴承套在平行导轨上,平行导轨焊接在导轨架上。

1.曲轴主轴 2.曲柄板 3.连杆
2.2 拨杆圆盘设计
拨杆圆盘由拨杆、橡胶板及压板等组成,如图4所示。两圆盘之间的距离及相邻拨杆圆盘的距离对采收率有影响,距离太大或太小都会使采收率降低。依据核桃树形结构特点,本文取两圆盘之间的距离为225mm,相邻导轨架的距离为414mm。工作时,8组拨杆圆盘同时进行振动作业,拨杆圆盘周向均匀分布12个拨杆。拨杆通过橡胶板和压板压紧,橡胶板与压板间通过锁紧螺母进行紧固,同时压板压紧轴承套中间的凸台,同轴承套固结,既保证了整个周向拨杆的分布,又能防止拨杆在反复振动过程中脱落。为减少振动过程中对树枝产生破坏性损伤,拨杆选用韧性好、耐磨力强的尼龙棒。
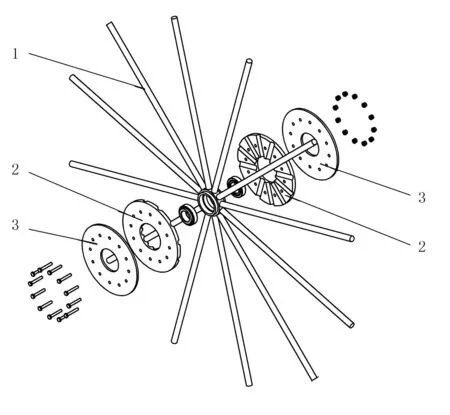
1.拨杆 2.橡胶板 3.压板
3运动与惯性力分析
3.1 曲柄滑块总成运动分析
为便于分析曲柄滑块机构运动过程,将曲柄滑块机构简化成运动分析图,如图5所示。取O点为坐标原点,取x,y正轴方向为矢量正方向,装置起始位置位于右侧极限位置。
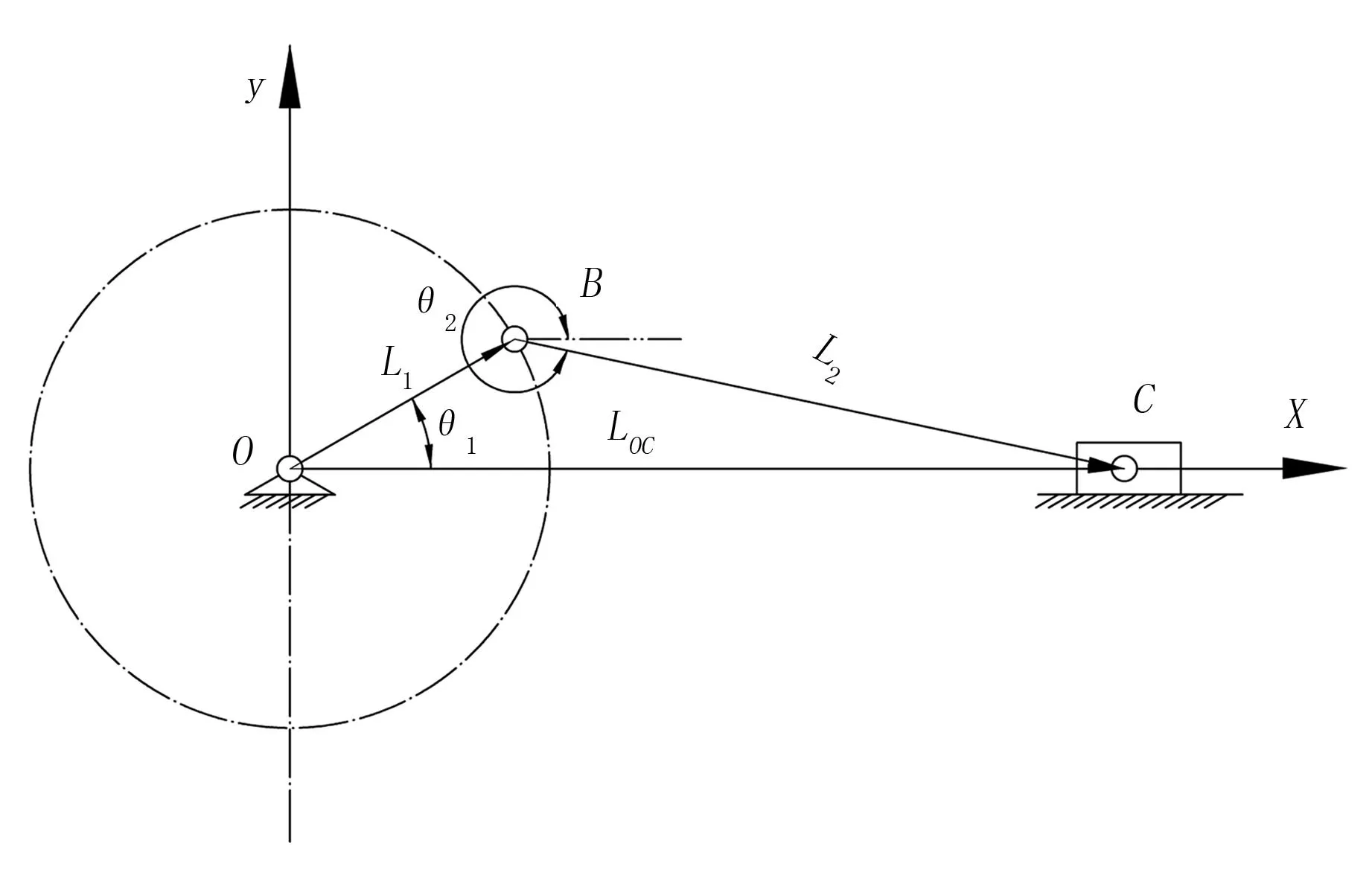
图5 曲柄滑块机构运动分析简图
由复数矢量法可知
(1)
利用欧拉公式整理并展开,则有
L1cosθ1+L2cosθ2=LOC
(2)
L1sinθ1+L2sinθ2=0
(3)
由式(3)可知
θ2=-arcsin(L1sinθ1/L2)
(4)
求导可得到L2角速度为
(5)
式(2)分别对t进行一次及二次求导,可得到滑块速度及加速度为
(6)
(7)
因此,装置产生的激振力为
F1=-maoc
(8)

L1—曲柄板OB的长度;
L2—连杆BC的长度;
Loc—滑块C沿x轴位移;
voc—滑块C沿x轴速度;
aoc—滑块C沿x轴加速度;
t—机构运转时间;
θ1—t时刻曲柄板转角;
θ2—t时刻连杆转角;
ω1—曲柄角速度;
ω2—连杆角速度;
m—滑块质量。
振动频率可通过改变液压马达转速进行调整。当振动频率为2Hz,即马达转速n1=120r/min时,代入数据(L1=50mm,m=12kg,L2=120mm),通过Mathcad软件计算得出装置产生的激振力最大为134N>80N[6],满足核桃振动分离要求。因此,该装置能够将核桃振落。
3.2 采收装置惯性力分析
机构中的惯性力将导致机构振动,因此需要对装置惯性力进行分析。设曲柄滑块总成的组数为N,运动简图如图6所示。
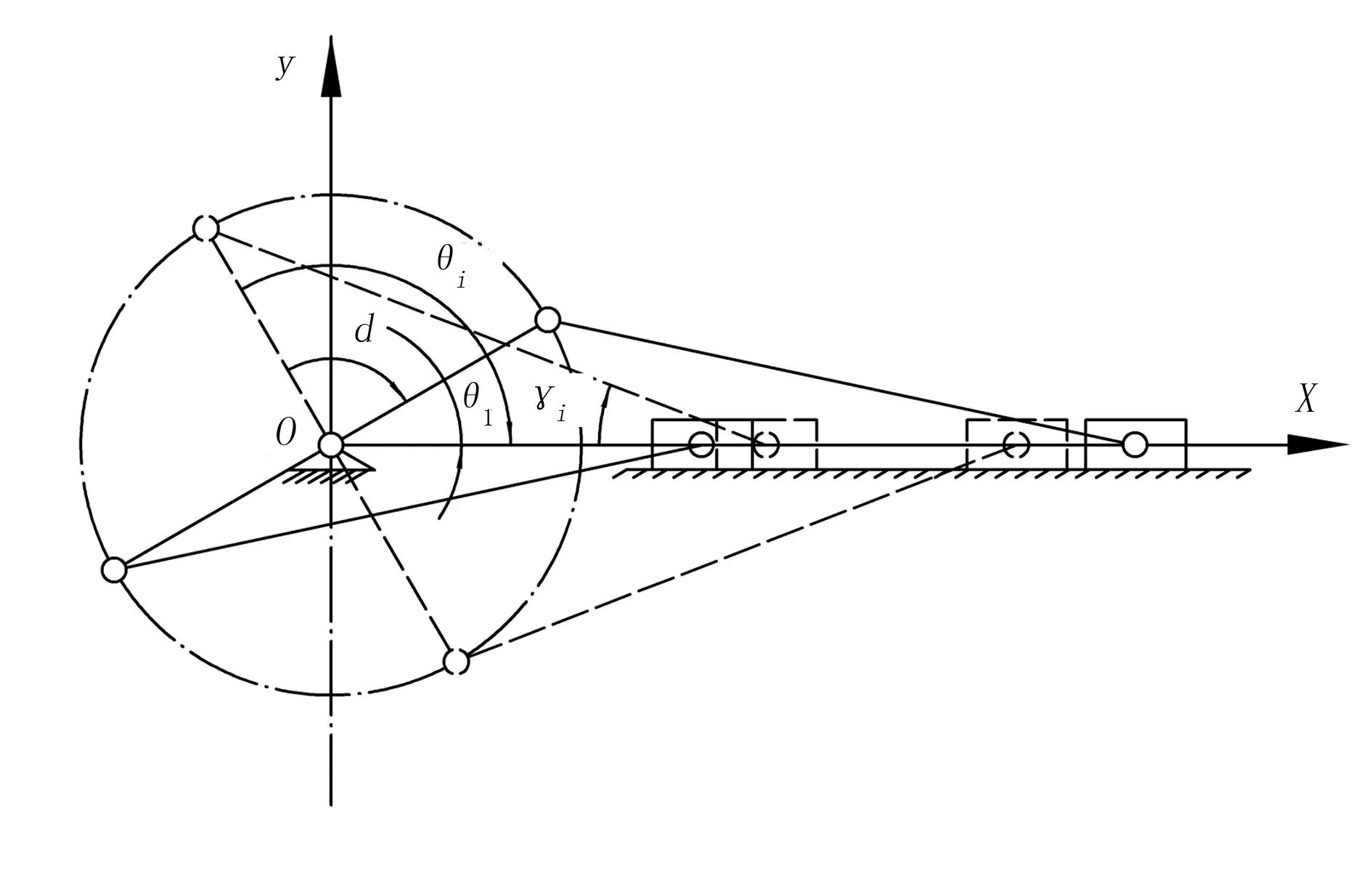
图6 多组曲柄滑块总成运动分析图
由图6可知
(9)
(10)
由公式(4)可知
tanγi=tan[2π-arcsin(L1sinθ1,i/L2)]
(11)
由于公式(7)中aoc是关于曲柄转速ω1和时间t的公式,因此不同相位下的加速度等同于不同时间下的加速度。对于第i组有
(12)
(13)

δ—曲柄板排布间角;
θ1,i—第i组曲柄转角;
γ1,i—第i组连杆与x轴负方向夹角;
aoc,i—第i组滑块加速度。
由于滑块在直线上滑动,因此加速度可以按照标量运算进行加减,合加速度为
∑aOC=aOC,1+aOC,2+…+aOC,N
(14)
为明确采收装置所受各曲柄滑块机构振动过程中的惯性力,取第i组曲柄滑块机构进行受力分析,如图7所示。

图7 单组曲柄滑块总成惯性力分析图
因滑块质量为m,所以存在惯性力为
Fcx,i=maoc,i
(15)
Fcy,i=Fcx,itanγi
(16)
由OBC系统平衡,得
Fox,i=-Fcx,i=-maoc,i
(17)
Foy,i=-Fcy,i=-Fcx,itanγi
(18)
x方向装置合力为
∑Fox=Fox,1+Fox,2+…+Fox,N=m∑aOC
(19)
y方向装置合力为
∑Foy=Foy,1+Foy,2+…+Foy,N
=m(tanγ1Fox,1+tanγ2Fox,2+…+tanγNFox,N)
(20)
将式(11)利用Mathcad软件计算得max(tanγi)=0.458,因此
∑Foy≤(0.458Fox,1+0.458Fox,2+…+0.458Fox,N)
=0.458∑Fox
(21)
装置所受合力为
(22)
式中Fcx,i—第i组滑块在x轴方向惯性力;
Fcy,i—第i组滑块在y轴方向惯性力;
Fox,i、Foy,i—轴端所受反作用力。
根据核桃树冠形态,选取4组曲柄滑块总成,即N=4,代入数据,通过Mathcad软件得合加速度∑aoC随时间的变化规律,如图8所示。
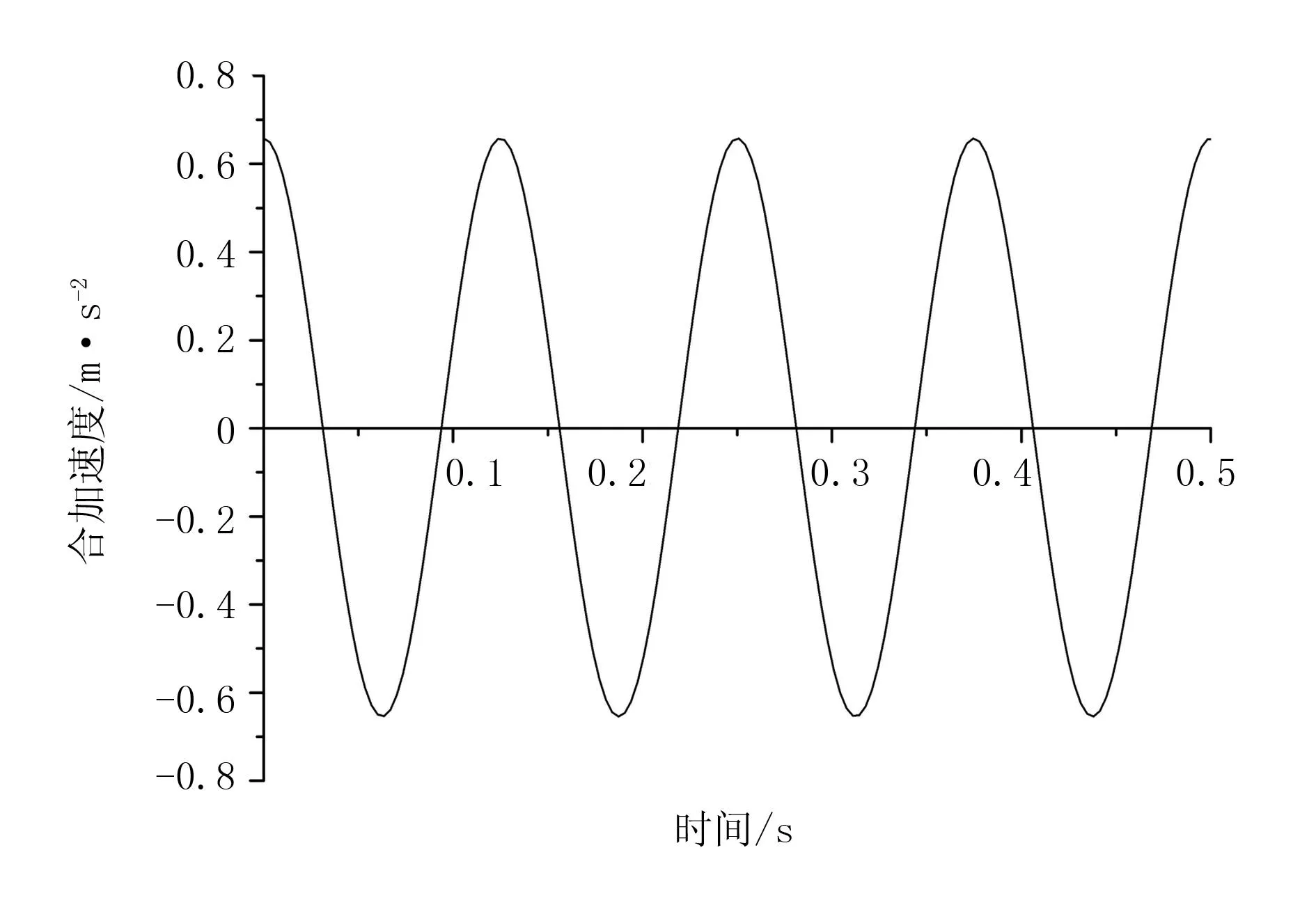
图8 合加速度曲线
由图(8)可得:maxΣaoc=0.658m/s2,装置所受合
惯性力最大值为maxΣF≤1.1maxΣFox=8.69N,可在曲柄板处增加平衡块以消除惯性力对采收装置的影响。
4结论
1)设计了一种树冠振动式核桃采收装置,可对不同生长形态的果树进行振动采收作业;拨杆圆盘绕轴向转动,有效地降低了采收过程中装置对树枝的机械损伤。
2)通过对滑块进行运动分析,得出了振动频率为2Hz时装置对核桃最大激振力为134N,验证了该装置对核桃振动采收的可行性。
3)通过对装置惯性力分析,得出了装置所受最大惯性力为8.69N,为采收装置结构优化及核桃收获机的进一步研究提供了基础。
参考文献:
[1]李忠新,杨莉玲,阿布力孜·巴斯提,等.中国核桃产业发展研究[J].中国农机化学报,2013,34 (4):23-28.
[2]高团结,坎杂,马俊贵,等.果园核桃机械化采收装置的设计[J].中国农机化学报,2013,34(5):185-189.
[3]佚名.核桃的正确采收与处理[J].果农之友,2011(10):46.
[4]王长勤,许林云,周宏平,等.偏心式林果振动采收机的研制与试验[J].农业工程学报,2012,28(16):10 -16.
[5]散鋆龙,牛长河,乔圆圆,等.林果机械化收获研究现状、进展与发展方向[J].新疆农业科学,2013,50(3):499-508.
[6]乔园园,牛长河,刘向东,等.核桃果柄分离力与其影响因素的相关系数研究[J]. 新疆农业科学,2014,51(3):524-531.
The Design and Analysis of Canopy Shaker Device for Walnut
Wang Zhenzhen, Kan Za, Fu Wei, Li Chengsong, Zhu Xingliang, Wang Lihong
(College of Mechanical and Electrical Engineering, Shihezi University, Shihezi 832000,China)
Abstract:In order to improve the harvesting efficiency of walnut and reduce the damage of walnut tree, a kind of canopy shaker device was designed under the planting of Xinjiang walnut. The exciting force caused by the straight reciprocating motion of disks with driving levers around was used to harvest walnut. Through the analysis of the slider-crank mechanism, the expression of acceleration and velocity were deducted. And the maximum exciting force was solved as 134N by solving mechanism, while the frequency was 2Hz. The feasibility of the mechanism was verified. Meanwhile, the inertia force of mechanism was analyzed to deduct the resultant force expression of different groups slider-crank, and its maximum value was 8.96N. It provides a theoretical basis for the research of Xinjiang walnut harvester.
Key words:walnut ;canopy shaker;device; slider-crank
中图分类号:S225.93
文献标识码:A
文章编号:1003-188X(2016)08-0056-04
作者简介:王真真(1988-),男,山东平原人,硕士研究生,(E-mail) 970279450@qq.com。通讯作者:坎杂(1963-),男,新疆精河人,教授,博士生导师,(E-mail)kz-shz@163.com。
基金项目:国家自然科学基金项目(51465051,51365049)
收稿日期:2015-07-14
猜你喜欢
今日农业(2021年3期)2021-12-05
今日农业(2021年19期)2021-11-27
保健医苑(2020年1期)2020-07-27
河北果树(2020年1期)2020-02-09
河北果树(2020年1期)2020-02-09
今日农业(2019年13期)2019-08-12
基层中医药(2018年2期)2018-05-31
陕西画报(2016年1期)2016-12-01
小说月刊(2015年4期)2015-04-18
现代营销·经营版(2013年5期)2013-05-14
