
原状土入渗性能自动检测装置设计
2016-03-23 01:37贾维兵杨启良刘小刚武振中邢浩男昆明理工大学现代农业工程学院昆明650500
中国农村水利水电 2016年9期
贾维兵,杨启良,刘小刚,武振中,邢浩男(昆明理工大学 现代农业工程学院,昆明 650500)
0 引 言
入渗是降雨或灌溉水由地表进入土壤的物理过程[1,2],量化土壤入渗性能对于理解和描述水文模型具有重要的意义[3]。土壤入渗率的测量一直受到国内外学者的广泛关注。Green和Ampt[4]、Kostiakov[5]、Horton[6]、Philip[7-9]等分别在入渗测量定量研究的基础上,通过理论分析分别提出了著名的Green-Ampt、Kostiakov、Horton及Philip入渗模型。圆盘(负压)入渗仪是在负压下进行入渗的装置,用来测量非饱和导水率和土壤导水参数[10]。水渗入土壤的速率低于地表自由积水入渗。产生这种现象的原因是,圆盘入渗仪维持一定的负压向地表供水,因此产生的导水率一般略低于饱和导水率。所以一般情况下,用双环法或单环入渗仪确定土壤的饱和导水率[11]。
环式入渗仪由于入渗模型概念清晰,计算简单,设备成本相对较低,可以方便地进行野外策略,目前应用最为普遍,同时也是最为经典的测量方法[1,12],为了提高环式入渗仪的测量精度及操作方便性,学者致力于对环式入渗仪进行改进。王文焰[13]等与PrieKsat[14]等分别提出了双环法的改进装置和自动测量系统,在传统双环法的基础上增加了马氏瓶、传感器、伽玛射线仪等,从而可完成自动测量,缩短测量时间并提高测量精度。王富庆等[15]应用自动控制技术,采用高精度的液位继电器、电磁阀和数据采集器等组成智能化环式土壤入渗特性测量系统,提高了测量自动化程度。Milla与Kish[16]采用红外传感器及单片机进一步提高了环式入渗仪测量自动化及操作便捷性进行改进。
考虑到原状土壤的质地、容重、初始含水量、有机质含量等时空分布很不均匀,导致双环入渗过程中,湿润锋的迁移并不是理想的在同一个水平面内,而是呈不规则的分布。本人前期进行了室内土柱的入渗能力自动检测装置的研制,该装置能够自动检测土壤的累计入渗量和土柱不同位置土壤水分含量的连续变化,基于此,本文采用频域反射法传感器,在单环水平面上不同位置检测湿润锋的迁移规律,并利用单片机驱动装置,改变传感器的位置来检测入渗过程中不同位置的土壤含水量,来进一步提高双环入渗仪的测量精度。
1 设计方案
1.1 结构设计
本文研发的原状土入渗性能自动检测装置,包括底座1,支座2,齿条3,伺服电机4,探头进出齿轮5,探头进出滑轨6,限位支座7,探头进出滑块8,水平旋转齿轮9, 步进电机10, 水平旋转滑块11, 水平旋转滑轨12, 水平旋转齿轮13, 导杆14,螺杆15,传感器16,上支座17,螺杆电机18,如图1所示。
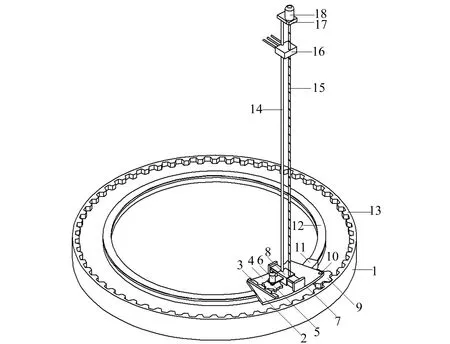
图1 装置的总体图
如图1所示,本发明土柱入渗性能检测装置包括底座1、水平旋转调节机构、进出土柱调节机构、高度调节机构,水平旋转调节机构设置在底座1上,进出土柱调节机构设置在水平旋转调节机构上,高度调节机构设置在进出土柱调节机构上。
其中所述水平旋转调节机构包括水平旋转齿轮9、步进电机10、水平旋转滑块11、水平旋转滑轨12、水平旋转齿轮13,水平旋转滑轨12、水平旋转齿轮13固定在底座1上,水平旋转滑轨12位于水平旋转齿轮13内侧,水平旋转滑块11设置在水平旋转滑轨12上并与其相配合,步进电机10安装在水平旋转滑块11的一侧,步进电机10与水平旋转齿轮9连接并驱动其运动,水平旋转齿轮9与水平旋转齿轮13相配合。
进出土柱调节机构包括支座2、齿条3、伺服电机4、探头进出齿轮5、探头进出滑轨6、限位支座7、探头进出滑块8,支座2安装在水平旋转滑块11上,支座2上设置有齿条3、限位支座7和探头进出滑轨6,限位支座7设置在探头进出滑轨6的两端,探头进出齿轮5设置在齿条3一侧并与其相配合,探头进出齿轮5与伺服电机4连接并由其驱动,伺服电机4与探头进出滑块8连接,探头进出滑块8设置在探头进出滑轨6上并与其相配合。
高度调节机构包括导杆14、螺杆15、传感器16、上支座17、螺杆电机18,导杆14的两端分别安装在探头进出滑块8和上支座17上,螺杆15两端分别通过轴承安装在探头进出滑块8和上支座17上,传感器16套装在导杆14和螺杆15上,螺杆15穿过上支座17与螺杆电机18相连。水平旋转滑轨12为两侧设有半圆形水平旋转滑轨槽的环状轨道,水平旋转滑块11内侧设有半圆形水平旋转滑块槽,水平旋转滑块槽与水平旋转滑轨槽通过滚珠相配合。
所述探头进出滑轨6两侧设有半圆形的探头进出滑轨槽,探头进出滑块8内侧的半圆形探头进出滑块槽与探头进出滑轨槽通过滚珠相配合,探头进出滑块8两侧设有限位开关,限位开关与限位支座相配合。
1.2 技术特点
本装置的优点是:①该装置能够自动检测入渗过程中不同位置不同时间原状土壤水分的动态变化,同时也能够检测该过程中其他的物理参数(温度、电导率、pH等);②检测的过程中可以自动快速地获取大量的检测数据,与人工方法相比,不仅降低了科研人员的劳动强度,更降低了检测数据的误差;③该装置安装简单,可操作性强,适合相关高校和科研院所进行室外原状土入渗过程相关参数的快速检测。
2 硬件电路及软件
2.1 硬件电路
该装置的电路包括频域反射法传感器、伺服电机、步进电机和螺杆电机,同时为了方便观察检测得到的数值,装置采用数码管实时显示检测得到的数值,所以选用Arduino mega 2560开发板,arduino mega 2560单片机是采用USB接口的核心电路板,处理器核心是ATmega2560,具有54路数字输入输出,适合需要大量IO接口的设计。频域反射法传感器检测得到的模拟信号直接与arduino mega 2560的IO接口相连,IO接口将模拟信号转换成数字信号,以便单片机处理数据。
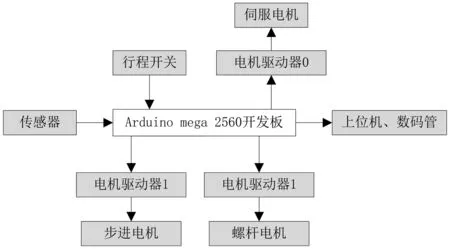
图2 装置硬件电路连接关系图
伺服电机、步进电机和螺杆电机,是通过脉冲信号进行控制,配合电机驱动器TB6600,通过arduino mega 2560单片机IO接口输出一定频率的脉冲信号进行控制。电机的转动方向也是通过单片机IO口输出高低电平来改变。检测得到的实时数据通过数码管动态显示。
2.2 软 件
系统控制程序是在arduino 1.0.5软件中用C语言开发,编译仿真后下载到arduino mega 2560自带的flash中,上电后按下运行按钮即可运行。
3 工作原理
在开始检测时,在arduino mega 2560开发板的控制下,启动步进电机,步进电机输出轴旋转带动与其相连的水平旋转齿轮Ⅰ,水平旋转齿轮Ⅰ与水平旋转齿轮Ⅱ相配合,水平旋转齿轮Ⅱ固定不动,则水平旋转齿轮Ⅰ运动,同时水平旋转齿轮Ⅰ通过步进电机与水平旋转滑块相连,水平旋转齿轮Ⅰ的运动带动与其相连的水平旋转滑块的运动,同时水平旋转滑块与水平旋转滑轨相配合,所以水平旋转滑块会沿着水平旋转滑轨做圆周运动,传感器通过导杆和螺杆安装在支座上,支座安装在水平旋转滑块上,所以水平旋转滑块的圆周运动也带动传感器在水平面内做圆周运动,传感器在水平面内旋转,直到传感器探头与待测的原状土壤位置对齐后停止转动。
然后驱动螺杆电机,螺杆电机输出轴开始转动,螺杆电机输出轴转动带动与其相连的螺杆在水平面内的旋转,导杆固定不动,传感器一侧与导杆相配合,另一侧与螺杆螺旋副配合,所以螺杆在水平面内的旋转带动传感器沿着螺杆的轴线方向运动,使传感器运动到要求的位置。此时,传感器开始检测原状土的入渗过程湿润锋的运移,检测是连续的过程,检测到的数据传输给上位机进行处理和分析。检测一定的时间后,开始检测土柱的相关指标,开发板驱动伺服电机,伺服电机开始工作,伺服电机输出轴转动带动与其相连的探头进出齿轮旋转,探头进出齿轮与齿条相配合,齿条固定在支座上,所以探头进出齿轮沿着齿条做直线运动,同时探头进出齿轮与探头进出滑块相连,探头进出滑块会随着探头进出齿轮做直线运动,但是探头进出滑块与探头进出滑轨相配合,齿条探头进出滑轨平行,所以探头进出滑块会沿着齿条和探头进出滑轨做直线运动,导杆和螺杆安装在探头进出滑上,传感器安装在导杆和螺杆上,所以探头进出滑块的直线运动带动导杆和螺杆在水平面内的直线运动,从而带动和传感器在水平面内的直线运动,使传感器的探头进入到土柱内部,在探头进出滑轨的两侧设置了限位支座,当传感器的探头进入到土柱一定深度时,探头进出滑块上的限位开关与限位支座接触,使限位开关停止工作,传感器探头进入土柱的过程停止,传感器的探头开始检测土柱中的相关物理参数,检测到的参数传输给上位机进行分析处理,等一段时间完成检测后,驱动器驱动伺服电机,使伺服电机相对于刚才反转,这时,传感器探头从土柱中出来,完成一个过程的检测,为了防止保护装置,探头进出滑轨的另一侧也设置了限位支座和限位开关。
4 结 语
原状土入渗性能自动检测装置已取得国家授权专利(实用新型专利:2015206255273,发明专利:2015105105790),它是对目前双环入渗仪的进一步改进,该装置不仅能够测量室外原状土的渗透速度,而且能够连续自动测量入渗过程中湿润锋的迁移规律和不同时空的土壤的含水量。通过该装置的使用,使科研人员从人工方法检测脱离出来,不仅提高了试验的检测精度,而且提高了科研人员的工作效率,为研究原状土的入渗过程中湿润锋的运移规律和水分迁移提供技术支持。
□
[1] Bouwer H.Intake rate:cylinder infiltrometer[M]∥Klute A.Methods of soil analysis.Madison,W:American society of Agronomy. 1986:825-843.
[2] Hillel D.Environment soil physical[M].New York:Academic Press,1998.
[3] Mao L L,Bralts V F,Pan Y H,et,al.Methods for measuring soil infiltration:State of the art[J].International Journal of Agriculture and Biological Engineering,2008,1(1):22-30.
[4] Green W H,Ampt G A.Studies on soil physics,part I-the flow of air and water through soils[J].Agricultural Science,1911,4(1):1-24.
[5] Kostiakov A N.on the dynamics of the coefficient of water-percolation in soils and on the necessity for studying it from a dynamic point of view for purposes of amelioration[J].Trans.Sixth Comm.Int.Soc.Soil Sci,1932,6:17-21.
[6] Horton R E.Analysis of runoff plot experiments with varying infiltration-capacity[J].Transactions of the American Genphysicists,Union,Part IV,1939:693-694.
[7] Horton R E.An approach toward a physical interpretation of infiltration-capacity[J].Soil Science Society of America Journal,1941,5(C):399-417.
[8] Philip J R.An infiltration equation with physical significance[J].Soil Science,1954,77(2):153-158.
[9] Philip J R.The theory of infiltration:I.The infiltration equation and its solution[J].Soil Science,1957,83(5):345-358.
[10] 薛绪掌,张仁铎.用盘式负压入渗仪数据计算土壤导水参数[J].水利学报,2001,(10):12-18.
[11] 雷延武,张 婧,王 伟,等.土壤环式入渗仪测量效果分析[J].农业机械学报,2013,44(12).
[12] Bodhinayak W,Si B C,Nobori K.Determination of hydraulic properties in sloping landscapes from tension and double-ring infiltrometers[J].Vadose Zone Journal,2004,3(3):964-970.
[13] 王文焰,张建丰.田间土壤入渗试验装置的研究[J].水土保持学报,1991,5(4): 38-44.
[14] Prieksat M A,Ankeny M D,Kaspar T C.Design for an automated,self-regulating,single-ring infiltrometer[J]. Soil Science Society of American Journal, 1992, 56(5):1 409-1 411.
[15] 王富庆,沈荣开. 新型智能土壤入渗特性试验仪[J]. 中国农村水利水电,1998.(10):10-11.
[16] Milla K,Kish S.A low-cost microprocessor and infrared sensor system for automating water infiltration measurements[J].Computers and Electronics in Agriculture,2006,53(2):122-129.
猜你喜欢
中国特种设备安全(2022年6期)2022-09-20
哈尔滨轴承(2020年4期)2020-03-17
中国设备工程(2019年12期)2019-08-05
设备管理与维修(2019年10期)2019-02-16
橡塑技术与装备(2018年20期)2018-10-20
猪业科学(2018年4期)2018-05-19
橡塑技术与装备(2018年10期)2018-05-18
新能源科技(2018年1期)2018-02-17
汽车零部件(2017年6期)2017-07-25
西安工业大学学报(2014年12期)2014-12-26
