GPS-RTK联合全站仪在深水库区吊装平台测量定位的应用
2016-03-23 00:31:33徐红刚贺昌海
中国农村水利水电 2016年6期
王 兵,徐红刚,贺昌海,刘 全
(1. 武汉大学水资源与水电工程科学国家重点实验室,武汉 430072;2. 中国水利水电第七工程局有限公司,成都 610081)
水上测量定位一般应用于海洋、湖泊、水库等的水下地形测量,海道、河道及疏浚工程的测量与导航定位中,与陆地上的静止测量不同,由于测量点在水上很难完全保持静态,因此是一种实时动态定位测量[1]。现代测量技术主要有:光学定位、无线电定位、以卫星定位为代表的新型无线电定位、水下声学定位及组合定位测量技术等[2]。随着多星群全球导航卫星系统的快速发展,卫星导航领域正经历着巨大的变化。北斗、Galileo、GLONASS、GPS四大系统的全面发展,将给科学和工程应用带来巨大的机遇和挑战[3]。卫星定位目前主要采用GPS定位,而RTK技术更是一场技术革命,以其快速、高精度和劳动强度低等优势在近年的工程测量中应用广泛[4]。特别是在水利工程方面,如进行水下地形、航道测量[5],海堤工程地形测量,河流综合治理工程地形测量[6]等。组合定位将几种定位方法组合进行测量作业,相互补偿,互相校核,提高定位精度。
1 工程概况
塔贝拉水电站是巴基斯坦开发印度河干流的一座综合利用水利枢纽工程,具有灌溉、发电、防洪等效益。塔贝拉坝位于拉瓦尔品第西北约64 km,坝系斜心墙土石坝,是世界上已建填筑量最大的土石坝。工程于1968年开工,1976年正式蓄水发电。右岸布置4条隧洞,原设计1、2号隧洞用于发电,3、4号隧洞用于灌溉。建成后经过三次扩建,装机容量达3 478 MW(1992年),为巴基斯坦提供16%的电力供应。近年来巴国经济快速发展,为缓解电力缺口,同时减少对进口能源的依赖,改善电力结构,巴基斯坦水电开发署将塔贝拉水电站第四期扩建项目作为优先开展的低成本发电战略项目。
四期工程通过将右岸的4号灌溉引水洞改为发电引水洞,新建装机1 410 MW,使塔贝拉水电站装机总容量达4 888 MW。4号灌溉引水洞的改造工程要求先将2套叠梁门吊入取水口门槽完成封堵。取水口距库区陆地水平距离约200 m,无固定(或陆上)平台可供安设吊装设备,因此须采用水上吊装方式;而门槽位于库区水位下100~120 m处,近100 m无导轨,且门槽导槽容差仅±30 cm。为了确保叠梁门吊入门槽内并避免叠梁门搁浅在门槽上方或卡槽等不利状况出现,需在吊装过程中对叠梁门进行精确定位。然而深水库区下能见度低且无自然光、无通视条件,不具备水面光学观测监控条件;深水中无GPS信号,不具备遥测条件;若采用水下声学定位,则定位精度难以保障。
根据上述特点,采用将水下定位转化为水面定位的方法,即通过对叠梁门运吊装一体化平台的位置调整下放叠梁门在水中的位置,确保叠梁门精确入槽,避免叠梁门搁浅在门槽上方或卡槽等不利状况。然而叠梁门槽正上方库水面开阔,吊装平台必然受水面风浪影响,从而使叠梁门在吊装过程中随平台发生摆动;隧洞轴线距离仅96.7和144.6 m的1、2号洞仍在引水,水库层流影响明显,吊装区水流条件复杂,闸门自由度大,吊装过程历时较长,须多次重定位,定位精度要求高、难度大。针对这一难题,必须构建一套叠梁门吊装平台快速高精度水上测量的技术方案。
2 方案选择与分析
综合考虑塔贝拉水电站现场施工条件和设备采购、运输条件等因素,叠梁门吊装测量定位主要考虑以下几种技术方案。
2.1 全站仪
全站仪(Electronic Total Station),是一种集光、机、电为一体的高科技测量仪器,是集水平角、垂直角、距离、高差测量功能于一体的测绘仪器系统。
全站仪选点与布点灵活、地形适应性强、测量精度达亚毫米级,在交通工程、建筑工程、测绘工程、水利工程等领域均有广泛应用,是目前最为常用的测量仪器[7]。
叠梁门吊装位置处于开阔的库水面上,受风浪和平台上吊装作业的影响,平台自身稳固性较低,且在运吊装过程中需进行多次测量与校核,因此使用全站仪定位测量耗时较长;同时库区水面蒸汽将直接影响测量的精度。
2.2 GPS-RTK系统
RTK(Real Time Kinematic)也即实时动态测量,是基于载波相位观测值的一种GPS实时定位测量技术,它能够实时地提供测站点在指定坐标系中的三维坐标。在测站稳定、测量时间较长的条件下,可以达到毫米级精度。在RTK作业模式下,基准站通过数据链将其观测值和测站坐标信息传递给流动站。流动站接收来自基准站的数据,同时采集GPS观测数据,并在系统内组成差分观测值进行实时处理,解算整周模糊度未知数,从而得出定位结果[8]。流动站可处于静止状态,也可处于运动状态,利用RTK技术实现动态测量。
GPS-RTK具有操作简便快捷、自动化程度高、直观、实时性强而极大提高作业效率、定位精度较高、不受天气与通视条件的限制等优点[9]。但是,由于GPS-RTK测量属于无线电遥测技术,在无线电信号干扰区,其测量稳定性和误差均受影响。
由于在库区水面上对吊装进行定位,流动站的位置不断变化,坐标解算是动态的,存在系统误差,降低了测量精度。大面积水面将对电磁波信号产生强反射作用,使得天线同时接收有直接从卫星发射的信号和从水面反射的电磁波信号,这两种信号叠加形成的观测量,将对定位结果产生影响,也即多路径误差。在高反射环境下多路径误差可达10 cm 以上,严重时可引起GPS信号失锁,对GPS-RTK测量精度产生严重影响[10]。
2.3 GPS-RTK联合全站仪的组合动态测量技术
目前,GPS-RTK与全站仪联合作业的模式在道路工程、油田工程及数字测图等领域得到了广泛的应用与肯定。在水利工程中,GPS-RTK与全站仪联合作业多用于地形测图,如渭河干流综合整治工程数字地形采集[11]、罗家店水电站库区地形测量[12]、潮白河断面测量[13]等均采用这种组合模式。而在水上高精度定位控制方面的应用则较罕见。用GPS-RTK施测宽阔地带的放样点,而在GPS-RTK失锁或定位精度要求高的情况下,用全站仪施测。两种测量技术相得益彰,实时和高精度优势兼得;既避免了GPS-RTK测量中部分情况下的精度欠缺,又避免了全站仪放样的低效,有效地提高了作业效率。
上述3种测量方案运用于本次水上叠梁门吊装施工中,其技术指标及比较如表1所示。
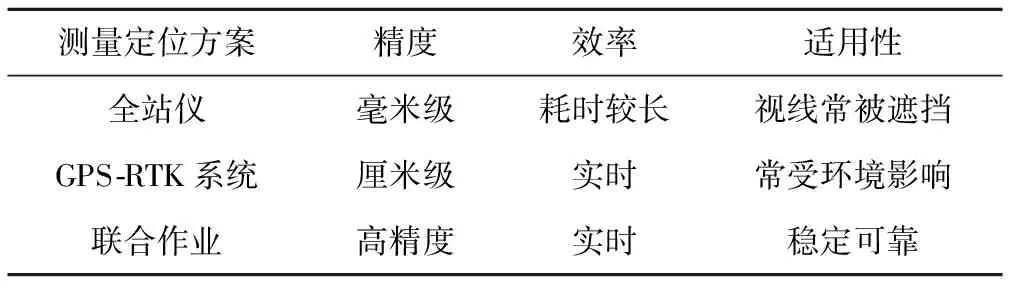
表1 各测量定位方案技术指标及比较Tab.1 Technical indicators and comparison of the surveying positioning schemes
综上所述,GPS-RTK与全站仪联合作业的组合动态测量技术在本次叠梁门吊装平台快速高精度水上定位测量中优势明显。与“南海一号”打捞定位所采用的超短基线水下定位系统[14]相比,本技术所需相关仪器设备较为常用、成本较低、经济合理,因此选用此方案。
由于目前的GPS-RTK遥测技术和全站仪光学测量技术主要应用在陆地测量,需要针对水上施工平台,建立测量周期短、可靠性强、精度高的水上吊装定位测量系统,如图1所示。
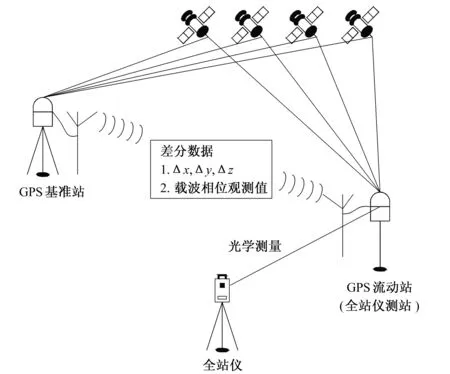
图1 测量系统原理示意图Fig.1 Schematic diagram of surveying system
3 GPS-RTK与全站仪联合测量定位
3.1 选用和布设合适的GPS- RTK平面控制网点
根据施工现场的作业范围和环境,以及测量需求,远离无线电干扰源,在4号引水洞进口附近陆地或上游进水口围堰上选取已知点,建立坐标参考基准站。
3.2 GPS- RTK流动站布置
叠梁门运吊装一体化平台的定位要求叠梁门起吊中心线与进水口门槽中心线重合,因此吊装平台上至少需要设两个流动站。
考虑GPS流动站与起吊点在吊装平台上的相对位置关系,为方便测出的GPS坐标数据能直观地指导锚定系统调整吊装平台,实现高精度快速定位;同时考虑不影响水上吊装施工,选取吊装平台长度方向的两个角点架设流动站,如图2所示。两角点的位置即为根据门槽平面坐标换算出的叠梁门起吊与门槽对位时的控制点。
3.3 全站仪测控网的布置
为满足全站仪通视性的需求,避免障碍物遮挡影响通视性等问题,提高测量效率,在右岸和上游围堰开阔处分别选取1个已知坐标点安置全站仪;在浮箱平台上靠近下游一侧两角点设置测站点放置棱镜,根据全站仪显示的角度和距离参数,控制叠梁门吊装平台的位置和方向,如图3所示。
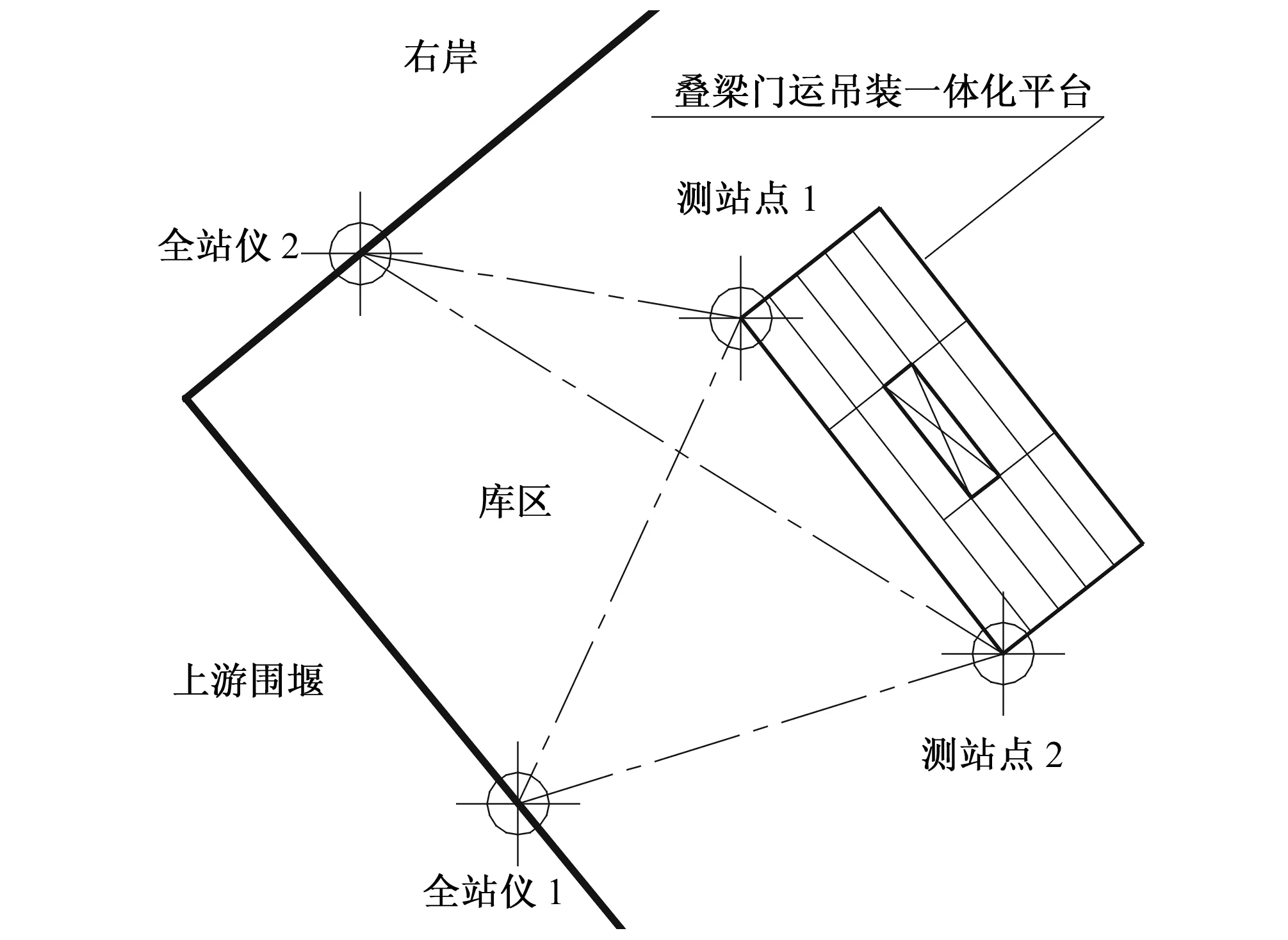
图3 全站仪与吊装平台测控网布置图Fig.3 The survey and control network between Electronic Total Stations and lifting platform
3.4 测量定位实施效果
库区4号隧洞取水口叠梁门吊装采用整套运输、逐节吊装的方式,将叠梁门的4节门叶安装到100 m深水下的门槽内。如图4所示,首先,在岸边用汽车吊将一套4节叠梁门装载到叠梁门运吊装一体化平台上,用驳船驱动浮箱平台至安装区域附近并进行锚定。测量人员利用平台上已安装的GPS接收机读取坐标信息,指挥平台的移动和方向调整,至叠梁门槽顶部附近。再使用岸边全站仪分别对平台上的2个测站点进行测量复核,根据屏幕显示的数据对平台的方位进行微调,GPS-RTK辅助,直至平台上的吊点中心与叠梁门门槽中心线重合且方向一致。通过浮箱平台上的吊孔,利用门机将叠梁门吊入水中,直至其底部距门槽入口0.5 m时停止。再次利用测量系统对平台和叠梁门姿态进行测控,使叠梁门起吊操控中心线与门槽中心线重合,继续下放叠梁门至门槽底部。如法,完成其他门叶及另一套叠梁门吊装。
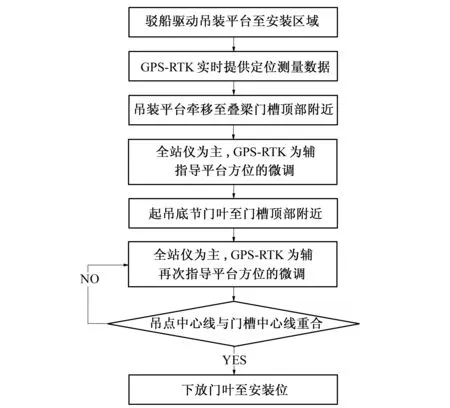
图4 GPS-RTK与全站仪联合作业流程图Fig.4 Flow chart of GPS-RTK and Electronic Total Stations combined operation
采用上述测量定位方案,工程于2014年12月成功吊装2套、共8节叠梁门。每节叠梁门吊装循环大约耗时2 h。由于全站仪与GPS-RTK联合作业效率高,定位测量精度高,吊装过程进展顺利,未发生叠梁门搁浅在门槽上方及卡槽等不利状况。
之后,在GPS-RTK与全站仪联合作业的定位测量条件下,又对两套叠梁门进行了一次起吊出槽、改造并再次吊装入槽的操作。起吊出槽和再次吊装入槽过程顺利,作业娴熟高效。
4 结 语
本工程百米级深水高精度叠梁门无导轨吊装作业,在水面无定位参考、水面风浪、水下层流等不利条件下,主要依靠水面的叠梁门运吊装一体化平台解决定位问题。研究采用GPS-RTK与全站仪联合作业的测量定位手段,完成了两套叠梁门的两轮吊装作业。在深水库区吊装定位现有文献资料中,鲜见GPS-RTK联合全站仪测量定位的应用,本工程尚属首次应用。本水面测量方案测量效率与成本兼顾,可操作性强,便于工期控制,具有良好的经济效益,可为库区水上和水下定位提供参考。
□
[1] 黄炎梁.GPS水上定位测量原理与应用[J].测绘通报,1995,41(2):22-23.
[2] 李冰皓,白 涛,谢宝童,等.GPS RTK在水下地形测量中导航定位的应用[J].北京测绘,2000,14(3):9-11.
[3] Li Xingxing, Zhang Xiaohong, Ren Xiaodong, et al.Precise positioning with current multi-constellation Global Navigation Satellite Systems: GPS, GLONASS, Galileo and BeiDou[J/OL].Sci Rep, 2015,(5):8 328.
[4] 刘小玲.RTK技术在控制测量中的应用[J].中国农村水利水电,2007,(5):133-135.
[5] 刘 勇,袁希平,赵京黔.GPS-RTK技术在水下地形测量中应用研究[J].昆明理工大学学报(理工版),2006,31(2):19-22.
[6] 张金城,薛志导.RTK动态测量在水利工程测量中的应用[J].黑龙江科技信息,2011,15(10):5.
[7] 王 刚.全站仪结构原理与发展分析[J].现代物业·新建设,2013,12(10):34-36.
[8] 徐绍铨.GPS测量原理及应用[M].武汉:武汉大学出版社,2003.
[9] 杜珍应.GPS RTK技术在水利工程控制测量中的精度分析[J].煤炭技术,2007,26(5):118-119.
[10] 陈俊林.GPS-RTK在常规控制测量中的精度及可靠性分析[J].测绘与空间地理信息,2011,34(5):95-98.
[11] 史晓峰.陕西渭河干流综合整治工程RTK结合全站仪数字测绘工序研究[J].陕西水利,2012,81(4):167-168.
[12] 宋师珍,梦 莹,谢 家.在罗家店水电站测量中RTK配合全站仪的测量应用[J].黑龙江水利科技,2011,39(4):141-142.
[13] 王 杰,姜景鑫.RTK配合全站仪在潮白河断面测量中的应用[J].价值工程,2014,33(31):97-98.
[14] 隋海琛,杨 鲲,张彦昌,等.“南海一号”打捞过程中的水下定位和姿态检测[J].水道港口,2009,30(2):139-142.
猜你喜欢
中国港湾建设(2023年12期)2023-12-27 17:19:58
科学导报(2023年84期)2023-12-17 16:29:04
行政科学论坛(2023年1期)2023-03-08 01:40:50
北京测绘(2020年12期)2020-12-29 01:37:18
工程与建设(2019年3期)2019-10-10 01:40:18
水利规划与设计(2017年8期)2017-12-20 08:23:55
水利规划与设计(2017年6期)2017-07-18 10:56:27
现代语文(2016年21期)2016-05-25 13:13:32
电测与仪表(2016年9期)2016-04-12 00:29:52
黑龙江工程学院学报(2015年2期)2015-04-19 00:43:13