地面雷达中常见的方位偏差故障排除
2016-03-22 05:36:26华东电子工程研究所胡丙华
电子世界 2016年2期
华东电子工程研究所 胡丙华
地面雷达中常见的方位偏差故障排除
华东电子工程研究所胡丙华
【摘要】随着现代雷达技术的飞速发展,新体制雷达的不断出现,系统工作模式越来越多样化灵活化,雷达系统也越来越复杂,但方位信号在任何雷达系统都有着至关重要的作用,一旦方位信号出现大的偏差都将会是非常严重的故障,本文从典型地面雷达系统的角度出发,分析了出现方位偏差的常见故障,并给出排除措施,希望对雷达使用和维护人员有所帮助。
【关键词】方位信号;方位偏差
1 引言
方位信号对任何雷达而言都是非常重要的,无论雷达体制多么先进,系统多么复杂,雷达性能多么强大,一旦方位出现偏差都将会是非常严重的故障,甚至是事故,特别是对于架设在离边境不远的雷达,方位出现偏差有可能导致将正常航线上的民航机判断为敌机入境,其后果是可想而知的,因此,对于雷达操作人员和维护人员,有必要知道雷达方位信号如何产生、信号如何传输以及出现故障时该如何排查。由于雷达方位信号在雷达系统中非常重要, 本文从一般地面警戒雷达的角度出发,讲述方位信号的产生,以及常见的方位故障排除,希望对雷达操作人员有所帮助。
2 雷达方位信号的产生
在精确定位控制系统中,为了提高控制精度,准确测量控制对象的位置是十分重要的。目前,检测位置的办法有三种:其一是使用位置传感器,测量到的位移量经A/D转换成数字量送至系统进行进一步处理。此方法精度高,但在多路、长距离位置监控系统中,由于其成本昂贵,安装困难,因此并不实用;其二是采用光电码盘,通过码盘透光孔照射光敏电阻取样,输出相应位置信息;其三是采用光电轴角编码器进行精确位置控制。光电轴角编码器根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式三种。
一般比较常用的为光电码盘编码器,编码器主要功能就是将转动的角模拟量变为数字量,当前在雷达上使用的主要有增量式和循环编码器两类。增量式光电编码器主要有光源、码盘、检测光栅、光电检测器件和转换电路组成,码盘上刻有节距相等的辐射状透光缝隙,相邻两个透光缝隙之间代表一个增量周期,检测光栅上有A、B两组与码盘相对应的透光缝隙,用以通过或阻拦光源和光电检测器件之间的光线,它们的节距和码盘上的节距相等,并且两组透光缝隙错开1/4节距,使得光电监测器件输出的信号在相位上相差90度。当码盘随着被测转轴转动时,检测光栅不动,光线透过码盘和检测光栅上的缝隙照射到光电检测器件上,光电检测器件就输出两组相位相差90度电度角的近似正弦波的电信号,电信号经过转换电路的信号处理,可以得到被测的速度信息。
编码器通过十字连接头与伺服电动机连接,它的法兰盘固定在电动机端面上,罩上防护罩,构成完整的驱动部件。光电脉冲编码器的结构如图1所示。

图1 光电脉冲码盘结构示意图
在旋转铰链处安装有两个增量光学编码器,它们相互独立每个都能以平衡差分信号(RS-422) 形式提供ACP (I)、ACP (Q)、APR信号给方位输入单元。天线每转一周产生4096个方位变化ACP (I)、ACP (Q) 和一个方位参考脉冲。方位参考脉冲对于编码器来说是固定方位的,当编码器安装到雷达天线平台上时,由于安装位置不同其方位参考脉冲相对于天线到位停位置的方位不同,可以通过如下方法来测量天线到位停位置到码盘方位参考位置之间的脉冲数:
(1)天线到位停;
(2)将码盘计算机上记录脉冲数的开关打开;
(3)转动天线,当码盘方位参考脉冲送来时,码盘计算机会给出一个统计的数值,见下图中的“north1 data”即为天线到位停位置到码盘方位参考位置之间记录的脉冲数。
(4)当“north1 data”数据送回来之后,关闭码盘计算机,将码盘计算机上记录脉冲数的开关关闭,数据会保存在计算机里。
第一个数据一旦写入码盘计算机,只要码盘安装位置不变,一般不会发生变化,而且两次数据写入之间的数据误差不会太大,例如编码器一圈共产生4196个脉冲数,则一个脉冲代表的角度为1/4196=0.000238度,可以看出,一个脉冲代表的方位是非常小的,通常情况下第一个数据值两次写入之间的误差在10以内是允许的。

图2 参考脉冲方位示意图
第二个数据“north2 data”为定北仪送过来的定北数据值,其值表示地理正北方位到定北仪上箭头所指方向之间的夹角。

图3 定北方位示意图
第三个数据“north3 data”为系统修正的角度,当方位出现偏差时可以人为进行方位修正。
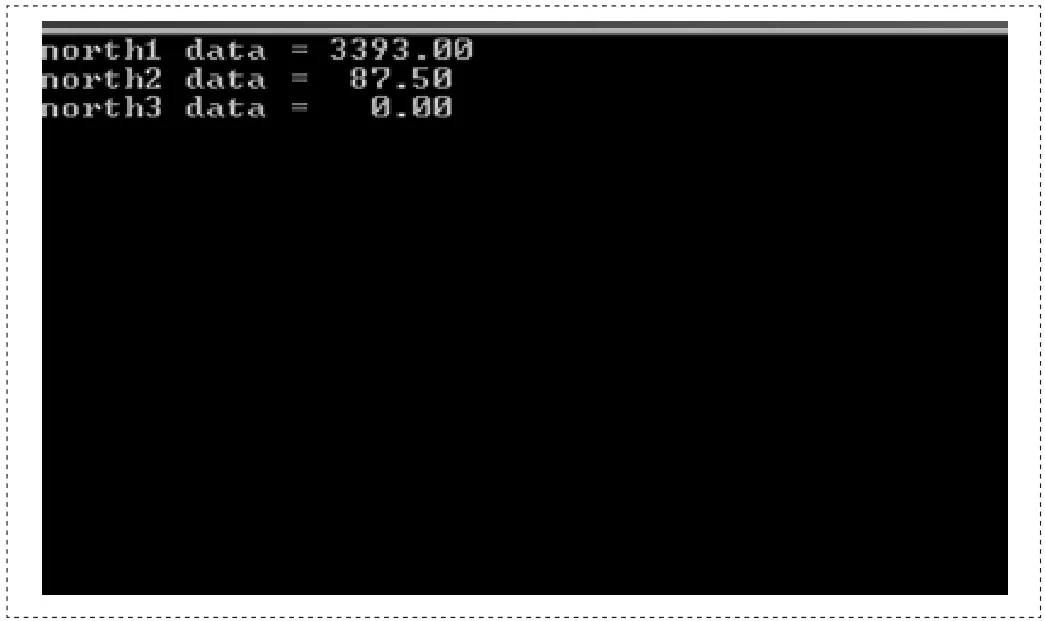
图4 码盘计算机VGA显示示意图
3 常见方位偏差故障
知道了图4中三个数据的含义后,对于排除方位偏差故障大有帮助,根据某型号雷达调试以及部队使用情况收集的故障信息,方位偏差故障一般分为以下三类:
(1)方位与真实方位出现一个固定角度偏差;
(2)方位与真实方位出现一个不固定角度偏差,即每圈正北方位都在变化;
(3)方位扫描线转到某个方位时出现扫描线回扫的现象。
对于第一类故障,可以通过如下步骤解决:
a.检查north1 data数据是否有变化,如有变化,则可以重新写入一至两次,如果数据变化较大,则需要对码盘重新进行安装;
b.如果码盘安装没有问题,则可能是码盘本身故障,可以通过更换码盘的方式解决;
c.如果north1 data数据没有变化,则可以通过重新定北的方式解决;
d.如果定北仍不能解决,则可以通过人工修正方位的方式解决;
其故障排除流程如图5所示:

图5 第一类故障排除流程图
对于第二类故障可以通过如下步骤解决:
a.通过多次写入码盘基数的方法来判断,如果多次写入的数值变化不大,则可以判定方位码盘正常;此时需要检查方位信号传输链路上是否有问题,例如方位信号链路上的匹配电容或电阻是否失效。
b.如果多次写入的数值变化较大,则可以判断为方位码盘故障或者其联轴节松动导致,可以通过重新安装或者更换方位码盘的方式解决。
其故障排除流程如图6所示:

图6 第二类故障排除流程图
对于第三类故障,可以通过如下方法解决:
用示波器观察方位码盘的基准脉冲信号,一圈只应该有一个方位基准脉冲信号,如果从示波器上观察到两个基准脉冲,则可以判断为方位码盘故障导致;如果示波器上只有一个方位基准脉冲,且每一圈只出现在固定方位,则可以判断为码盘计算机故障;
其故障排除流程如图7所示:

图7 第三类故障排除流程图
码盘的结构安装问题在实际使用中也比较常见,比较典型的有码盘连轴节打滑、码盘上的轴断裂等。码盘安装示意图如图8所示:

图8 码盘安装示意图
码盘连轴节易松,转动轴易断,分析认为一般是码盘转动轴与减速器端驱动轴不同轴,连轴节受到径向力,在转动过程中轴是扭转的。同轴度偏差大,轻则导致连轴节松脱,重则导致连轴节断裂,在实际安装过程中需要确保安装精度。
4 结束语
建议雷达操作人员每次在上报情况之前,都要先对雷达的方位信号进行检查,最直观的方法就是观察原始视频中固定地物杂波的方位,确保方位正确后才能上报情况。一旦方位出现偏差,需要注意观察故障现象,可以参考本文中介绍的相关方法进行检查。
参考文献
[1]《XXX雷达故障分析报告》(内部资料).
[2]《XXX雷达售后服务报告》(内部资料).
[3] XXX雷达培训资料(内部资料).
猜你喜欢
机械设计与制造(2022年4期)2022-04-28 04:32:10
幼儿园(2021年12期)2021-11-06 05:10:20
中国设备工程(2020年16期)2020-08-28 09:04:16
科学技术创新(2020年20期)2020-08-11 04:10:38
科技视界(2019年11期)2019-06-20 01:22:08
通信电源技术(2018年8期)2018-10-15 07:02:20
中国修辞(2016年0期)2016-03-20 05:54:32
幼儿100(2016年28期)2016-02-28 21:26:17
火控雷达技术(2016年2期)2016-02-06 02:29:00
新媒体研究(2014年21期)2014-12-16 20:45:26