扇贝脏器气吸分离装置柔顺臂动力学特性分析
2016-03-21 12:38:13姜海勇张先鹏弋景刚河北农业大学机电工程学院保定071001
农业工程学报 2016年2期
李 娜,姜海勇,张先鹏,弋景刚(河北农业大学机电工程学院,保定 071001)
扇贝脏器气吸分离装置柔顺臂动力学特性分析
李娜,姜海勇,张先鹏,弋景刚
(河北农业大学机电工程学院,保定 071001)
摘要:为了实现扇贝高效低损的自动化生产,针对扇贝脏器负压吸取分离方式,提出一种基于大变形分布式柔顺机构的气吸分离驱动结构。建立柔顺驱动臂伪刚体模型,将其等效为具有欠驱动关节的多刚体系统;并基于影响系数法建立柔顺臂等效多刚体系统的动力学模型,对等效多刚体系统中主、被动关节间运动进行动力学解耦,得到了系统的二阶非完整约束方程,推导出了等效欠驱动关节加速度与主动关节输入驱动力矩的表达式;在此基础上,对分布式柔顺臂的动力学特性进行仿真分析与样机试验,结果表明:利用柔顺臂的复合弹性变形,当转轴转角≤56°时,柔顺臂带动吸管垂直上升实现脏器吸取;当转轴转角≥61°时,吸管开始明显倾斜,吸管底面与水平夹在25°~30°之间,满足倾斜卸压要求,试验结果与仿真分析基本一致。分离装置基于柔顺机构运动特性,可有效简化设备机械结构与控制系统,降低成本与能耗,研究结果为扇贝自动化生产设备的研发提供参考。
关键词:建模;动力学;试验;扇贝脏器气吸分离装置;分布式柔顺臂;影响系数法
李娜,姜海勇,张先鹏,弋景刚. 扇贝脏器气吸分离装置柔顺臂动力学特性分析[J]. 农业工程学报,2016,32(2):244-251.doi:10.11975/j.issn.1002-6819.2016.02.035http://www.tcsae.org
Li Na, Jiang Haiyong, Zhang Xianpeng, Yi Jinggang. Dynamic characteristic analysis of distributed-compliant arm in vacuum suction device for scallop viscera separation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(2): 244-251. (in Chinese with English abstract)doi:10.11975/j.issn.1002-6819.2016.02.035 http://www.tcsae.org
Email:res_lina@126.com
0 引 言
双壳贝类是中国主要经济贝类之一,其闭壳肌亦称贝柱,不但营养丰富,而且还有很多保健功能,具有重要的食用价值和经济价值[1-3],是海湾扇贝养殖的主要经济产品。海湾扇贝的闭壳肌呈圆柱状,其两端面分别粘连在两个贝壳的内壁上,外套膜附着在贝壳的边缘,呼吸器等脏器附着在闭壳肌的周围,内脏结构复杂且与闭壳肌结合紧密,不易分离。
人工采集闭壳肌,均采用刀具勾挑内脏团分离的方式进行,会在闭壳肌上留下刀痕,影响产品的经济价值[4]。闭壳肌自动化采集通常采用2种方式:机械式剥离和非机械式剥离[5-6]。机械式剥离采用纯机械装置对闭壳肌和脏器套膜进行强制性剥离,但这种方法常对闭壳肌造成撕裂等损伤,成品率低[7-8];非机械式剥离则通过热处理[9-11]、化学试剂处理、超高压技术[12]等方式作用于扇贝,达到闭壳肌与脏器自动分离的目的,但这种方法由于对闭壳肌进行了一定的热加工,会破坏闭壳肌的营养成分[13-16]。因此海湾扇贝闭壳肌与内脏的低损分离成为实现其自动化采集的关键环节之一。
针对闭壳肌自动化剥离中的损伤问题,齐晓娜等提出以负压吸取方式实现闭壳肌与内脏团的分离[17]。气吸式扇贝脏器分离装置由吸管与驱动机构构成,由于受限于工作空间,采用传统刚性机械结构实现复杂的吸管位姿控制困难,因此基于柔顺机构依靠自身弹性变形来输出运动和力,在结构上少有甚至没有运动副的特点[18-20],本文提出分布式柔顺臂为主体的吸管驱动机构,简化机械结构的复杂程度。基于伪刚体模型法[21],本文建立柔顺臂的动力学模型,并进行动力学解耦得到了系统的二阶非完整约束方程,推导等效关节加速度与输入驱动力矩的表达式;在此基础上,对分布式柔顺臂的动力特性进行仿真分析与样机试验,为扇贝自动脏器分离设备的研发提供理论基础。
1 气吸式分离装置工作原理及结构
分离装置以负压吸取的方式将内脏团和外套膜从前工序处理的半壳贝中取出,仅留存闭壳肌于该侧贝壳内。所谓半壳贝即一侧贝壳与闭壳肌分离后,闭壳肌和扇贝脏器以及外套膜留存在另一侧贝壳内。试验表明气吸过程中吸管在内脏区域建立负压后必须驱动吸管的管口快速抬起,以提供足够的爆发力,才能将内脏从闭壳肌上脱离下来。
1.1分离装置工作原理
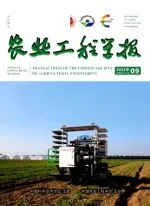
气吸式扇贝脏器分离装置的吸取过程主要由吸管接近目标建立负压、吸取内脏垂直上升、倾斜卸压3个阶段构成,如图1所示。
吸管弹起阶段是实现内脏负压吸取的关键。在吸管接触目标物并建立负压后,如果吸管发生倾斜会造成负压迅速减弱,就会导致吸取过程缺乏爆破力从而吸取效果差,甚至吸取失败。为了在吸取脏器的开始阶段保持强劲的冲击气流,吸管口要垂直上升一段距离,其间保持吸管口水平,前期试验表明,垂直上升阶段的行程应不小于10 mm,本文设定为13 mm,如图1b所示。吸取过程后段,吸附管口轴线应偏离目标物,以保证目标物脱离负压的吸附作用力,结束内脏吸取过程。试验表明偏斜卸压位置的垂直行程应不小于45 mm,偏斜角度不小于22°,本文分别设定为50mm和26°,如图1c所示。
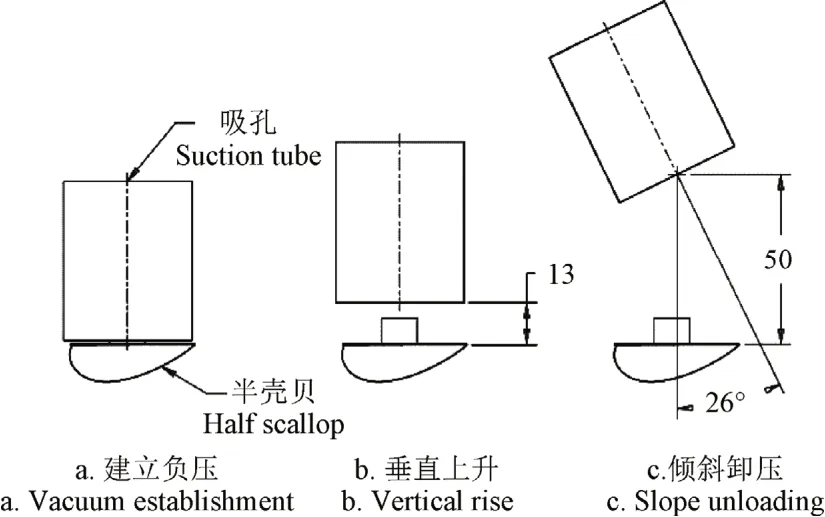
图1 吸取过程吸管与扇贝相对位置示意图Fig.1 Schematic diagram of relative position between suction tube and scallop through suction procedure
1.2分离装置主要结构
气吸式扇贝脏器分离装置主要由伺服电机、分布式柔顺臂、吸管、固定隔板等组成,如图2所示,主要技术参数见表1。
图2 气吸式扇贝脏器分离装置Fig.2 Vacuum suction device of scallop viscera separation
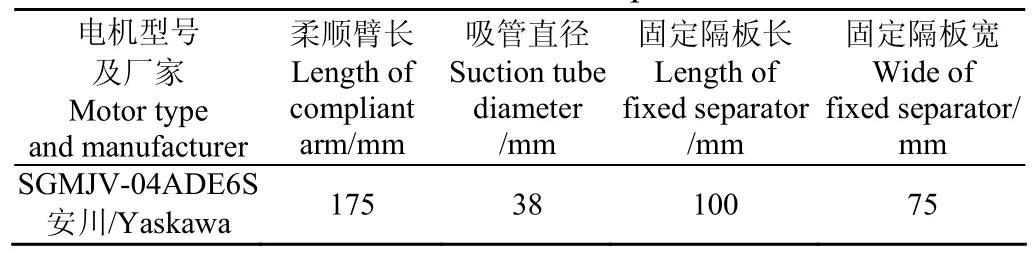
表1 主要技术参数Table 1 Main technical parameters
分离过程中,吸管与负压设备相连,半壳贝放至于固定隔板下方并与吸取孔对齐,控制系统输出信号控制伺服电机加速旋转,伺服电机通过转动关节带动柔顺臂旋转,吸管迅速完成垂直上移和偏斜卸压,将内脏团从贝壳中吸取出来。
吸管的直径受限于扇贝贝壳的大小,以壳高在45~55 mm之间的海湾扇贝为例,其外套膜处于贝壳边缘内侧3~5 mm的范围内,脏器与外套膜之间还有5~8 mm的距离。试验表明,脏器分离的力最大约为3 N。针对这一规格的扇贝,选取进风口直径为36 mm,吸管壁厚为0.8 mm,各零件均采用不锈钢制作。
2 分布式柔顺臂伪刚体建模
扇贝脏器负压分离装置中的柔顺臂为典型的分布式曲线型全柔顺机构[22-23],在工作过程中,通过此柔顺构件的受力变形来实现吸管对扇贝脏器的分离动作。由于柔顺臂存在非线性变形,所以线性梁方程不再适用,本文采用基于等效力-变形关系的伪刚体模型法对柔顺臂进行运动特性分析。首先建立柔顺构件伪刚体模型,进行伪刚性段划分,及关节等效扭簧常数计算。
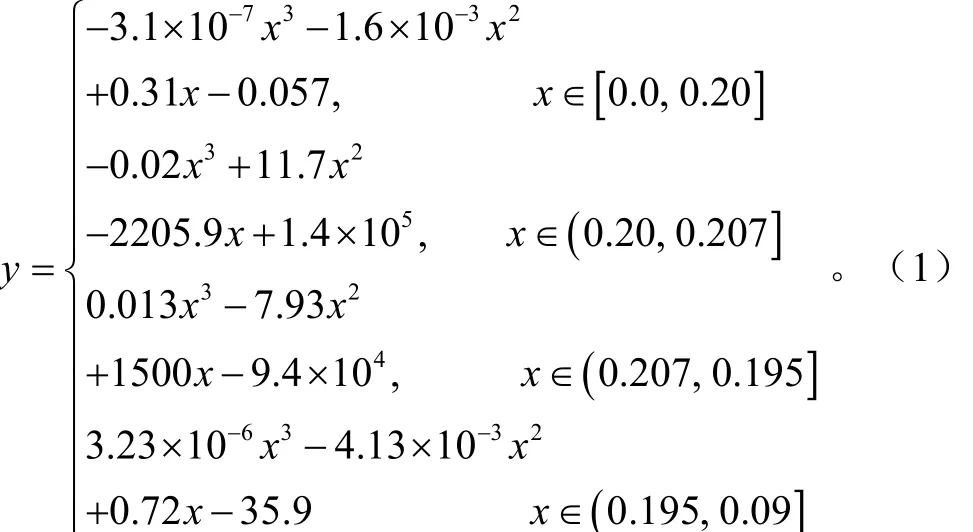
取柔顺臂构件横截面中心点连线作为描述其形状的函数曲线,以分段函数形式进行曲线拟合。以柔顺臂与主动关节转轴连接点为原点,竖直截面内水平和竖直方向分别为x、y轴,建立坐标系;通过对获得的横截面中心点连线上各点的数据进一步拟合,可得到其形状曲线的分段函数表达式
由于分布式全柔顺机构的弹性变形存在于整个机构中,因此理论上其等效关节可以位于柔顺构件的任意位置,即伪刚性段段长可以任意划分。但不同的划分方法对伪刚体模型精度的影响很大,因此合理划分伪刚性段是分布式柔顺机构伪刚体建模的重要前提。本文基于分布式全柔顺机构的几何形状、刚度分布的伪刚性段划分的2个原则[24],对柔顺构件进行伪刚性段划分。
根据柔顺机构形状尺寸,初选伪刚性段数N=13,已知形状曲线的总弧长为0.338 m,则平均弧长为=0.026m,弧长限制最大值smax=0.05 m,最小值smin=0.005 m。用等效刚性直杆连接各伪刚性段两端点获得伪刚体模型如图3所示。其中,与伺服电机相连的为主动关节1,其后依次为等效的被动关节2~13,对应伪刚性段为1~13,第13段伪刚性段与吸管相连,长度与吸管截面直径相等。
由于曲线型、变刚度的分布式全柔顺机构,其伪刚体模型是具有弹性储能关节的串联多刚体系统,关节间运动存在耦合,所以在计算这种柔顺机构的等效关节扭簧常数时,结合仅含单个等效关节的直线型、等截面的分布式全柔顺机构伪刚体建模,等效关节扭簧常数根据计算公式修正获得。
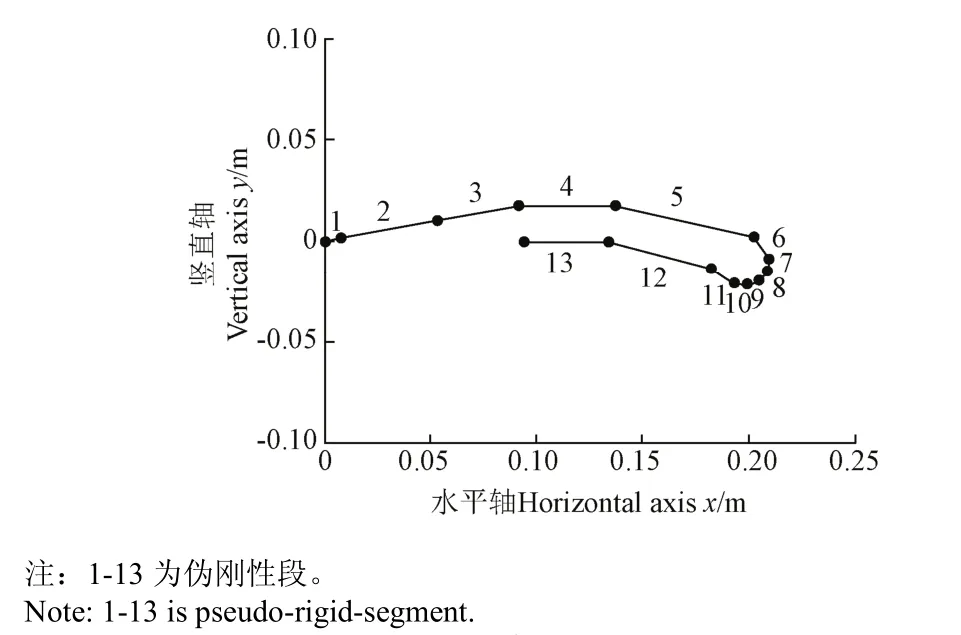
图3 分布式柔顺臂构件的伪刚性段划分Fig.3 Pseudo-rigid-segment partition of distributed-compliance fully compliant arm
柔顺臂材料采用弹簧钢,弹性模量为E=210 GPa,横截面宽为b=0.03 m,厚度为h=0.002 m,基于划分段数N=13,可得各伪刚性段主要参数,如表2所示。
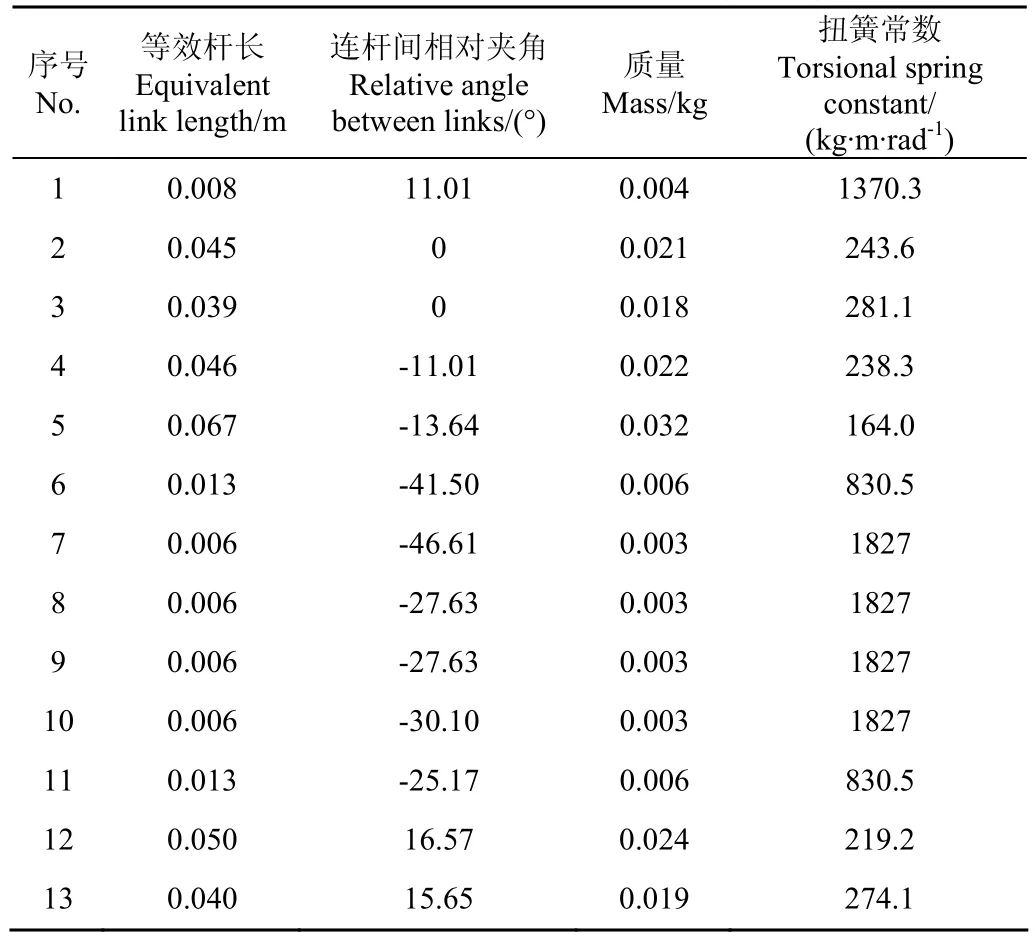
表2 伪刚性段主要参数Table 2 Main parameters of pseudo-rigid-segments
通过上述分析中所建立的柔顺臂的伪刚体模型,柔顺臂等效成为弹性欠驱动多刚体系统,其实质上是具有二阶非完整约束的动力系统,系统通过关节间动力耦合作用实现运动,一般基于动力学方程进行控制[25-26],因此必须首先建立系统的动力学方程,在此基础之上分析系统动力特性,是对此类机器人进行有效控制的前提。
3 柔顺臂基于伪刚体模型的动力学建模
根据动力学普遍方程,可得开链多刚体系统的动力学模型为


令vk=Gk表示第k等效刚体三维运动速度矢量,、、分别表示第i等效关节的广义坐标位移、速度、加速度,则θ=[ θ1θ2… θn]T,=[…]T和=[…]T分别为系统的广义位移、速度和加速度矢量;对等效刚体k的速度vk求导得到三维加速度Ak表达式
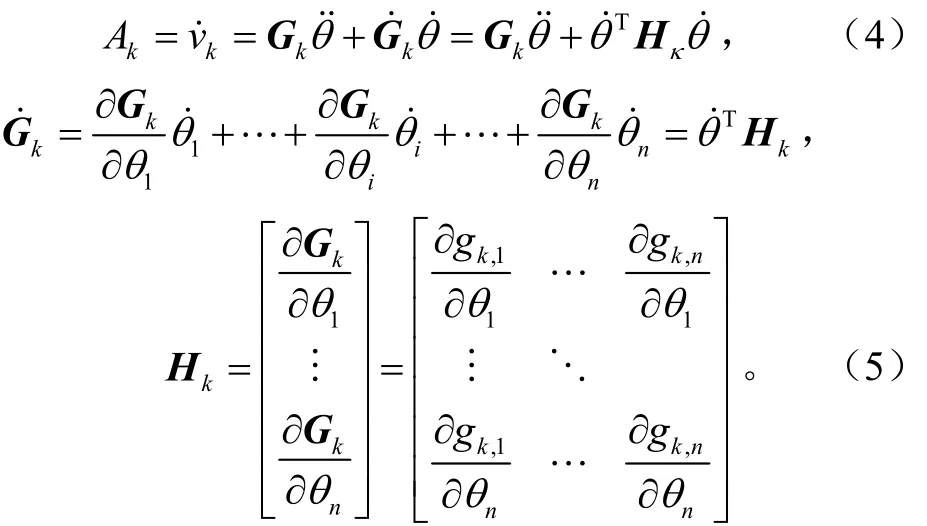
矩阵Hk是对应等效刚体k的二阶影响系数矩阵,它是一个以n维矢量为元素的n× n维矩阵。Hk的第i行第j列元素为三维矢量,是广义坐标的函数。

由此,式(6)右边第二项写成



其中Gn与Gn-1分别表示末端等效刚体n与第n-1等效刚体的一阶影响系数。

综合上述公式,可得柔顺臂的等效弹性欠驱动多刚体系统的动力学模型

4 基于动力学解耦的运动分析
令θɑ= θ1,θu=(θ2,…, θn)T,分别表示等效多刚体系统中主动关节1角度矢量和等效被关节的角度矢量,则系统的关节角度矢量可表示成θ=( θɑ, θu)T;相应角速度和角加速度矢量可表示为˙=,)T,=,)T;设关节1加速度,为已知输入控制量,关节1力矩为Tɑ= T1,其他等效被动关节输入力矩Tu=0。
令Gkɑ=(gk,1)、Gku=(gk,2…gk, n)分别为主动关节1与被动关节的一阶影响系数,则动力学模型中的惯性矩阵分解得

Christoffel张量C可表示为

同理,进一步分解得

此外,重力矩与末端外力矩可解耦为下面形式

关节弹性驱动力矩可解耦为

其中,θɑs表示主动关节驱动电机的输入转角矢量,ɑθ为相应产生的关节转角矢量;θus表示等效关节的初始角度矢量,uθ表示等效关节的转角矢量。
基于上述分解,柔顺臂等效多刚体系统解耦形式可表示为
为了讨论系统的运动特性,由式(14)、(15)、(16)可得下面方程组
由式(16)可得等效被动关节的加速度为
将上式代入方程组(17)中,可得关节1输入转矩T1的表达式
式(19)给出了柔顺臂主动关节输入力矩,其等号右边第二项可以写成下面形式

令CAU= Cɑu+ Cɑ表示耦合张量与惯性力(离心力、科氏力)的关系,因此,式(18)可表示为下面形式

式(18)、(19)给出了柔顺臂基于动力学模型的系统主动输入量,以及基于二阶非完整约束方程的柔顺臂位姿描述。
4 柔顺臂动力学特性仿真分析
基于柔顺臂的伪刚性段划分结果N=13,根据柔顺臂的结构参数可以得到各伪刚性段的质量mi,kg;杆长li,m;等效关节夹角θi,rad;基于修正公式得各等效关节扭簧刚度ki,kg·m/rad。设第1主动关节的加速度输入为= 5 rad/s2。
在扇贝脏器分离中,负压吸管对柔顺臂的作用力为均布力,大小与吸管两端柔顺臂和贝柱之间的垂直距离有关,为简化计算,将负压吸力等效为2个集中力,其大小与吸管和贝柱之间的距离由下式描述

基于式(11)建立的柔顺臂伪刚体动力学模型,可得到柔顺臂在0~0.25 s(一个扇贝脏器分离周期)内的动力学仿真,如图4所示。
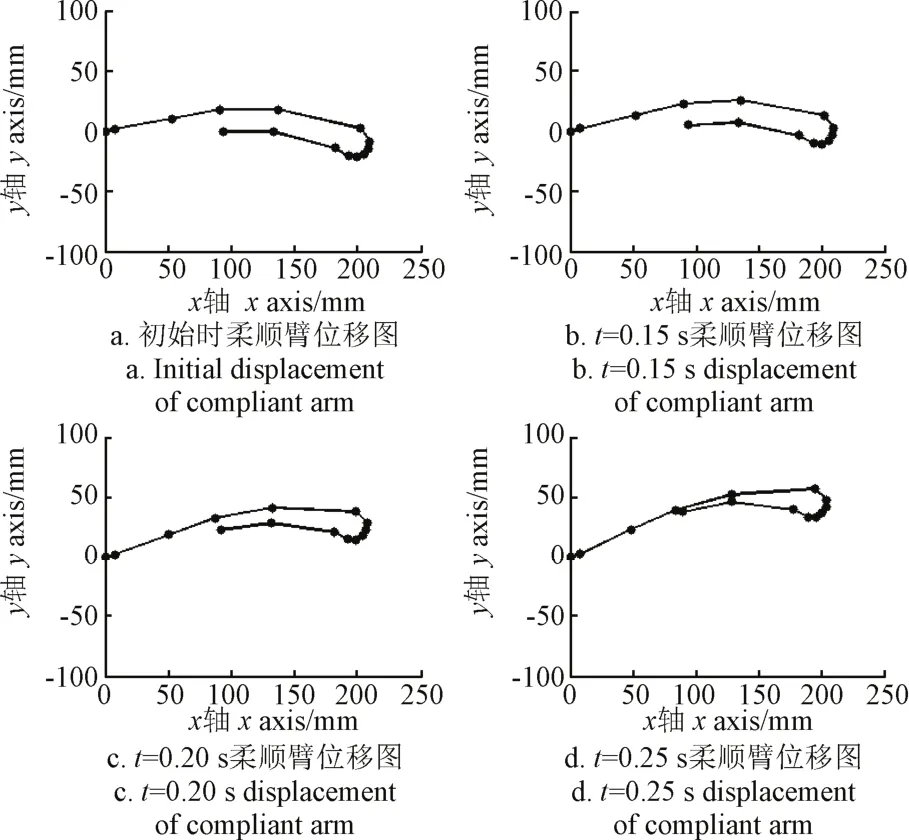
图4 分布式柔顺臂位移仿真图Fig.4 Displacement animation of distributed-compliance fully compliant arm
由图4中可得柔顺臂在脏器分离过程中(t=0,0.15,0.20,0.25 s),实现了对负压吸管提升的动作;由图4可得,柔顺臂与负压管连接部分在脏器分离过程中保持基本水平,实现吸管口垂直上升一段距离,有利于保持吸取过程的爆破力,实现吸管对扇贝脏器有效的吸力。同时在吸取过程后段,吸管在柔顺臂变形的作用下轴线偏离目标物,即吸管口与水平方向形成一定夹角,从而可以保证目标物脱离负压的吸附作用力,结束内脏吸取过程。
图5、6分别为与负压吸管相连的柔顺臂前后两点(等效关节13、末端点)在竖直方向的位移,以及吸管底面与水平方向夹角随时间的变化规律。
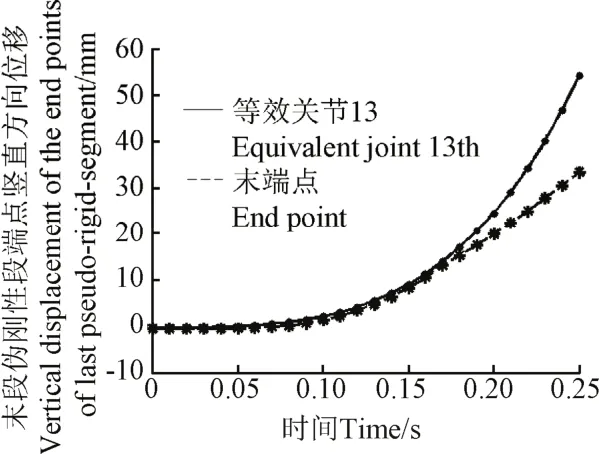
图5 柔顺臂末段伪刚性段端点竖直方向位移Fig.5 Vertical displacement of the end points of last pseudo-rigid-segment of compliant arm
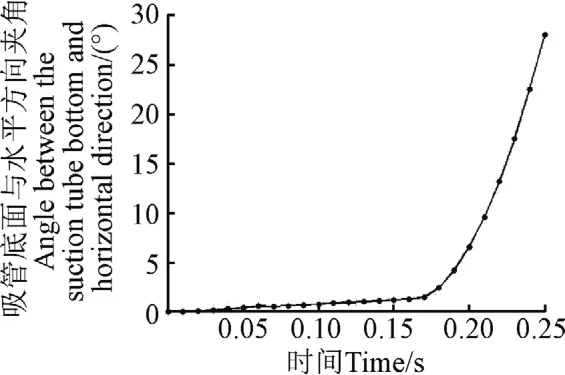
图6 吸管底面与水平方向夹角随时间变化规律Fig.6 Varying with time of angle between suction tube bottom and horizontal direction
由图5、6可得,在设定竖直上升行程13 mm范围内,柔顺臂与吸管连接部分在竖直方向位移差值很小,可保持吸管基本水平,实现对脏器的负压吸取;设吸管底面与水平夹角为α,在分离过程后段,柔顺臂变形运动带动α增大至28°,倾斜卸压位置的垂直行程接近50 mm,满足设定要求,因此能够实现目标物脱离负压的吸附作用力,结束内脏吸取过程。
基于柔顺臂伪刚体动力学模型解耦,由式(18)、(19)可得柔顺臂主动关节输入量,以及基于二阶非完整约束方程的柔顺臂运动学描述。
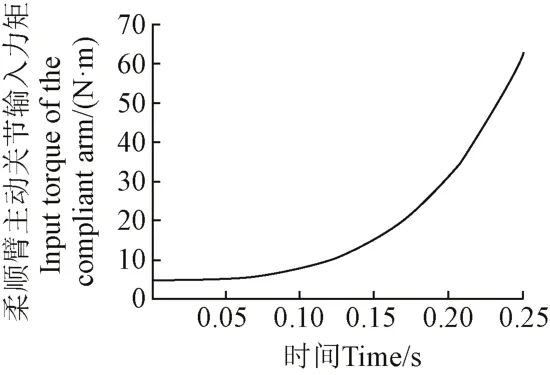
图7 柔顺臂主动关节输入力矩Fig.7 Input torque of the compliant arm
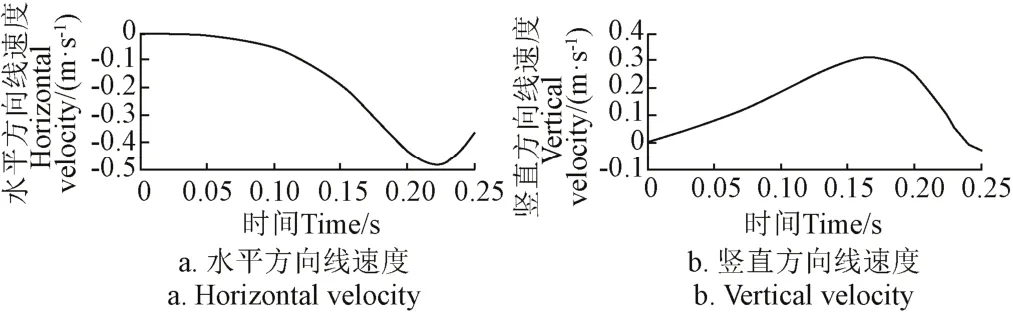
图8 柔顺臂末段伪刚性段线速度Fig.8 Velocity of the last pseudo-rigid-segment of compliant arm
由图7、8可知,柔顺臂末端伪刚性段线速度,即为与之相连的吸管在扇贝脏器分离过程中的x、y轴方向的线速度;吸管在竖直方向的速度符合设定的加速吸附脏器、减速结束内脏吸取的要求,同时在水平方向上,吸管在吸附阶段速度变化不明显,易于吸管对半贝壳的位姿保持,实现对脏器建立吸附负压。同时在保证对脏器吸附释放动作下,主动关节输入力矩变化平稳,易于实现分离装置控制。
5 样机试验
基于本文提出的分布式柔顺臂作为负压吸管的驱动元件,进行扇贝脏器自动分离装置试验,分离装置主要参数设置如下:伺服电机驱动角加速度为5.5 rad/s2,真空吸管最大气流量48 L/s,吸管内相对负压为18 kPa,柔顺臂材料选用65 Mn。
扇贝脏器负压分离过程状态如图9所示,将开壳后半贝壳放置于固定隔板上;设柔顺臂起始端转轴转角为β,吸管底面与隔板贴合位置为初始状态,β=11°。图9a建立负压阶段,转轴转角β约为19°,吸管没有发生上升,柔顺臂积蓄弹性势能,此时吸管底面与水平夹角α=0°,真空吸管与半贝壳间建立负压。图9b垂直上升阶段,转角β≤56°时,经试验测量,吸管底面与水平夹角α≤2°,柔顺臂带动真空吸管保持垂直上升至约30 mm。图9c倾斜卸压阶段,转角β≥61°时,吸管上升至约45 mm,在柔顺臂变形作用带动下,吸管开始明显倾斜,贝壳开始脱离吸附;当β达到67°时,吸管上升至约55 mm,半壳贝完全脱离负压吸附作用,内脏吸取过程结束;此时吸管底面与水平夹角α在25°~30°之间,满足倾斜卸压要求,试验结果与仿真分析基本一致。
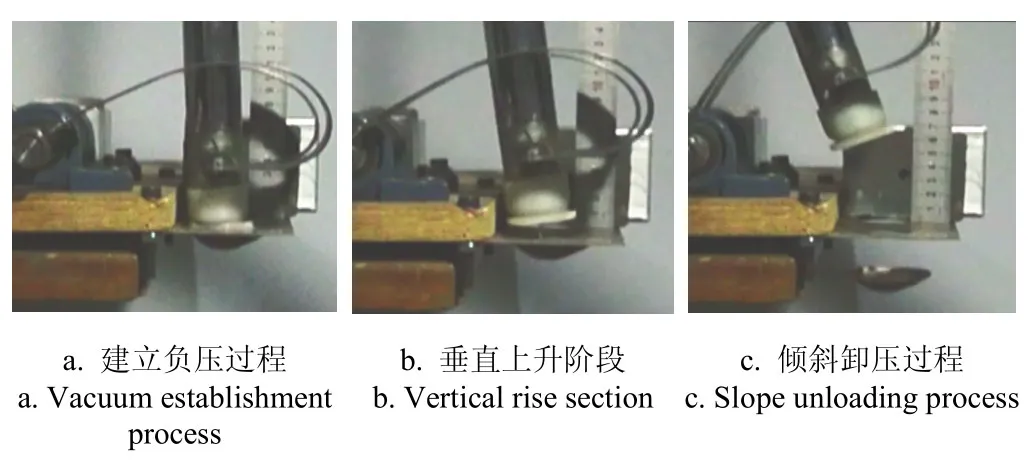
图9 扇贝脏器分离过程Fig.9 Process of scallop and viscera separation
将该分离转置应用于扇贝自动化生产设备中,采用8路气吸式贝柱与脏器自动化分离装置进行分离试验,试验对象选用河北省昌黎县海域所产海湾扇贝,扇贝个体高为45~56 mm,样本总容量为5 600枚。试验结果表明,其中479枚内脏未被完全摘取,或部分脏器残留,大部分残留是脏器内部撕裂造成,吸净率达到91.4%;在没有脏器残留的扇贝中有179枚的贝柱有损伤,破损率为3.5%,原因主要是扇贝属于自然生物,其闭壳肌的力学性能不同,在扇贝脏器的外套膜被气流裹挟离开贝壳时与闭壳肌有一定的黏连,闭壳肌的部分外层纤维随之发生破损。
河北昌黎与山东烟台等地是中国扇贝的主要产区,中等规模养殖户每年养殖3~5万笼,总质量约5.5×105kg。人工采收方式下,每年需用工50人,生产周期75 d,按人工费每天200元计,总人工成本约75万元。扇贝自动化生产设备设计生产效率是每分钟160枚,用工6人,按每个单体扇贝质量75 g,5.5×105kg折合约733万枚,总共需用时763 h,按每天12 h工作制,需要生产时间合计62 d,人工费用约7.5万元,总功率35 kW,折合能源费用约1.9万元,可使生产成本降低87%,因此扇贝自动化生产设备的使用能够为中国扇贝产区带来巨大的经济效益。
6 结 论
1)提出一种气吸式扇贝贝柱与脏器自动化分离装置,并对装置中分布式柔顺驱动臂的动力学特性进行研究。基于伪刚体模型法,建立了柔顺臂的动力学模型,并进行动力学解耦得到了系统的二阶非完整约束方程,推导出了等效关节加速度与输入驱动力矩的表达式。
2)柔顺臂的动力学特性仿真分析结果表明,负压吸附阶段,柔顺臂与吸管连接部分可保持吸管底面基本水平,保证负压下吸管瞬间吸附的爆发力,实现对脏器负压吸取;偏斜卸压阶段,柔顺臂能够带动吸管底面偏离水平方向,实现吸管对目标物脱离负压吸附作用,结束脏器吸取过程。
3)样机试验表明,柔顺臂可将一个转动输入转化为两个方向移动自由度,当转轴转角β≤56°时,柔顺臂带动真空吸管保持垂直上升至30 mm,当转轴转角β≥61°时,吸管开始明显倾斜,吸管底面与水平夹角α在25°~30°之间,满足倾斜卸压要求,试验结果与仿真分析基本一致。以5 600枚样本容量扇贝进行样机试验,结果表明扇贝脏器吸净率达到91.4%,贝柱破损率为3.5%。
[参考文献]
[1] 李伟青,王颉,孙剑锋,等. 海湾扇贝营养成分分析及评价[J]. 营养学报,2011,33(6):630-632. Li Weiqing, Wang Jie, Sun Jianfeng, et al. The nutrients analysis and evaluation of argopectens irradias[J]. Acta Nutrimenta Sinica, 2011, 33(6): 630-632. (in Chinese with English abstract)
[2] 于千钧. 中国海湾扇贝产业结构、特征和绩效研究[D]. 青岛:中国海洋大学,2014. Yu Qiangjun. A Study on Structure, Characteristics and Performances of Bay Scallop Industry in China[D]. Qingdao: Ocean University of China, 2014. (in Chinese with English abstract)
[3] Morita K, Kubota K, Aishima T. Investigating s ensory characteristics and volatile components in boiled scallop aroma using chemometric techniques[J]. Food Chemistry,2002, 78(1): 39-45.
[4] 沈建,林蔚,郁蔚文,等. 我国贝类加工现状与发展前景[J].中国水产,2008(3):73-75. Shen Jian, Lin Wei, Yu Weiwen, et al. Present situation and development prospect of Chinese shellfish processing[J]. China Fisheries, 2008(3): 73-75. (in Chinese with English abstract)
[5] 励建荣. 我国水产品加工业现状与发展战略[J]. 保鲜与加工,2005,5(3):1-3. Li Jianrong. Present situation of aquatic products processing industry in China[J]. Storage & Process, 2005, 5(3): 1-3. (in Chinese with English abstract)
[6] 李秋实,王家忠,弋景刚,等. 海湾扇贝闭壳肌剥离设备的发展现状与展望[J]. 广东农业科学,2013(10):198-201. Li Qiushi, Wang Jiazhong, Yi Jinggang, et al. Development state and prospect of bay scallops adductor splitting sevice[J]. Guangdong Agricultural Sciences, 2013(10): 198-201. (in Chinese with English abstract)
[7] 孔德刚,弋景刚,姜海勇,等. 海湾扇贝开壳取贝柱工艺方案的研究[J]. 中国农机化学报,2014,35(2):230-234. Kong Degang, Yi Jinggang, Jiang Haiyong, et al. Research on the process scheme to the bay scallop of shellfish opening for adductor[J]. Journal of Chinese Agricultural Mechanization,2014, 35(2): 230-234. (in Chinese with English abstract)
[8] 朱其霄,弋景刚,姜海勇,等. 海湾扇贝外套膜剥离机械手的设计[J]. 农机化研究,2015,29(4):63-67. Zhu Qixiao, Yi Jinggang, Jiang Haiyong, et al. Design of the mantle stripping manipulator of argopecten irradians[J]. Journal of Agricultural Mechanization Research, 2015, 29(2): 63-67. (in Chinese with English abstract)
[9] 张国琛,毛志怀,牟晨晓,等. 微波真空与热风组合干燥扇贝柱的研究[J]. 农业工程学报,2005,21(6):144-147. Zhang Guochen, Mao Zhihuai, Mu Chenxiao, et al. Combined vacuum-microwave and hot-air drying of scallop[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2005, 21(6): 144-147. (in Chinese with English abstract)
[10] 弋景刚,吴红雷,姜海勇,等. 蒸汽式扇贝开壳装置工作参数优化[J]. 农业工程学报,2014,30(18):70-77. Yi Jinggang, Wu Honglei Jiang Haiyong, et al. Optimization of operating parameters on steam-shelling device for scallop[J]. Transactions of the Chinese Society of Agricultural Engineering, 2014, 30(18): 70-77. (in Chinese with English abstract)
[11] 弋景刚,张静,姜海勇,等. 水流加热扇贝柱脱壳试验研究,食品科技,2014,39(2):139-142. Yi Jinggang, Zhang Jing, Jiang Haiyong, et al. Experimental research on water heating scallop shelling[J]. Food Science and Technology, 2014, 39(2): 139-142.(in Chinese with English abstract)
[12] Jabbour T, Hognason G. Method for Shucking Lobster, Crab or Shrimp: United States, US 2011/0070353 Al[P]. 2011-03-24.
[13] Cruz-Romero M C, Kerry J P, Kelly A L. Fatty acids,volatile compounds and colour changes in high-pressure-treated oysters Innovative[J]. Innov Food Sci Emerg, 2008, 9(1): 54-61.
[14] 王继涛. 热处理对扇贝闭壳肌肌动球蛋白生化性质的影响[J]. 食品与发酵业,2012,38(2):22-26. Wang Jitao. Effect of thermal treatment on biochemical properties of actomyosin from adductor muscles of scallop[J]. Food and Fermentation Industries, 2012, 38(2): 22-26. (in Chinese with English abstract)
[15] 赵伟. 超高压处理对牡蛎超微结构、组分及蛋白质变性的影响[J]. 食品与发酵工业,2011,37(5):7-11. Zhao Wei. Effects of high pressure processing on microstructure, ingredients and protein denature of fresh oyster[J]. Food and Fermentation Industries, 2011, 37(5): 7-11. (in Chinese with English abstract)
[16] 李书红,王颉,宋春风,等. 不同干燥方法对即食扇贝柱理化及感官品质的影响,农业工程学报,2011,27(5):373-377. Li Shuhong, Wang Jie, Song Chunfeng, et al. Effects of different drying methods on physicochemical and sensory characteristics of instant scallop[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(5): 373-377. (in Chinese with English abstract)
[17] 齐晓娜,姜海勇,邢雅周. 气吸式扇贝脏器分离装置流场计算机模拟[J]. 河北大学学报,2015,35(3):324-329. Qi Xiaona, Jiang Haiyong, Xing Yazhou. Simulation of the flow field in scallop viscera separating device with air suction[J]. Journal of Hebei University, 2015, 35(3): 324-329. (in Chinese with English abstract)
[18] 鲍官军,高峰,荀一,等. 气动柔性末端执行器设计及其抓持模型研究[J]. 农业工程学报,2009,25(10):121-126. Bao Guanjun, Gao Feng, Xun Yi, et al. Flexible end-effector based on flexible pneumatic actuator and its grasping model[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2009, 25(10): 121-126. (in Chinese with English abstract)
[19] 李守忠,于靖军,宗光华. 基于旋量理论的并联柔性机构型综合与主自由度分析, 机械工程学报,2010,46(13):54-60.Li Shouzhong, Yu Jingjun, Zong Guanghua. Type synthesis and principle freedom analysis of parallel flexure mechanisms based on screw theory[J]. Journal of Mechanical Engineering, 2010, 46(13): 54-60. (in Chinese with English abstract)
[20] 王学林,肖永飞,毕淑慧,等. 机器人柔性抓取试验平台的设计与抓持力跟踪阻抗控制[J]. 农业工程学报,2015,31(1):58-63. Wang Xuelin, Xiao Yongfei, Bi Shuhui, et al. Design of test platform for robot flexible grasping and grasping force tracking impedance control[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(1): 58-63. (in Chinese with English abstract)
[21] Howell L. Compliant mechanisms[M]. New York:John Wiley & Sons Press, 2001.
[22] Pavlovic N. Compliant mechanism design for realizing of axial link translation[J]. Mechanism and Machine Theory,2009, 44(5): 1082-1091.
[23] Masters N, Howell L. A three degree-freedom model for self-retracting fully compliant bistable micro mechanisms[J]. Journal of Mechanical Design, 2005, 127(4): 739-744.
[24] 李娜,赵铁石,孙东波,等. 分布式全柔顺机构伪刚体建模研究[J]. 机械工程学报,2010,46(19):83-88. Li Na, Zhao Tieshi, Sun Dongbo, et al. Pseudo-rigid-body modeling for distributed-compliance fully compliant mechanism[J]. Journal of Mechanical Engineering, 2010,46(19): 83-88. (in Chinese with English abstract)
[25] 余跃庆,徐庆平. 柔顺机构PR伪刚体动力学建模与特性分析[J]. 农业机械学报,2013,44(3):225-229. Yu Yueqing, Xu QingPing. Dynamic modeling and characteristic analysis of compliant mechanisms based on PR pseudo-rigid-body model[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(3): 225-229. (in Chinese with English abstract)
[26] 李源,余跃庆. 柔顺关节并联机器人动力学模型[J]. 农业机械学报,2015,46(7):345-353. Li Yuan, Yu Yueqing. Dynamic model of parallel robot with compliant joint[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(7): 345-353. (in Chinese with English abstract)
Dynamic characteristic analysis of distributed-compliant arm in vacuum suction device for scallop viscera separation
Li Na, Jiang Haiyong, Zhang Xianpeng, Yi Jinggang
(College of Mechɑnicɑl ɑnd Electricɑl Engineering, Agriculturɑl University of Hebei, Bɑoding 071001, Chinɑ)
Abstract:The scallop is one of the major economic bivalves in China, whose adductor muscle is called shellfish. Shellfish are nutritious, delicious, and have many healthcare functions, edibleness and economic value. The automatic collection of adductor muscle usually includes 2 methods which are mechanical type separation and non-mechanical type separation. The mechanical separation uses mechanical device to separate adductor muscles and viscera compulsively, but this kind of method often causes lacerated hurt for adductor muscle, and low rate of finished products. The non-mechanical method realizes the separation of adductor muscle and viscera through adopting heat treatment, chemical reagent treatment, and ultrahigh pressure technology,etc. However, the non-mechanical separation destroys the nutrition component of adductor muscles because of the hot process on them. Therefore, the low-loss separation for adductor muscles of bay scallop and viscera is one of the key processes to realize the automatic collection. In order to reduce the high-loss of adductor muscles of scallop during automatic separation,this paper presents the suction separating device based on the distributed fully-compliant mechanism. The suction separating device is composed of suction tube and motivating mechanism. Due to the space limitation, it is difficult to use the traditional mechanism to realize the high-speed lift and the complicated location and posture of the suction tube, and so the motivating mechanism for suction tube with the compliant arm as the principal part can simplify the complication of mechanical structure observably. The motivating mechanism is based on the energy storage and deformation of the distributed fully-compliant arm to realize the control of locomotion and posture of the suction tube during separating process, so it is essential to analyze the dynamic characteristics for control. The pseudo-rigid-body model for the compliant arm is built, which makes the compliant mechanism equivalent to a multi-body system with underactuated joints. Based on the influence coefficient method, the dynamic model of the equivalent multi-body system for the compliant arm is established. According to the dynamic modeling,the second-order nonholonomic constraint equations are developed from the decomposition of the active joint and the equivalent passive joints, and then the acceleration expressions of passive joints and the input torque of active joint are obtained. The dynamic characteristic of the compliant arm is simulated and the prototype is tested, then the result proves that during the negative pressure adsorption, the connective part of compliant arm and suction tube can keep horizontal basically to ensure explosive power to viscera under negative pressure with the input angle of motor ≤56°; when the input angle ≥61°,the angle of the bottom of suction tube and horizontal direction that is between 25°-30°can satisfy the experiment data with compliant arm driving, which can make the target object break away from suction tube to end the adsorption process. The test results and simulation analysis are basically identical.Hence, based on the characteristics of the compliant mechanism by relying on elastic deformation itself to realize the transition of the locomotion and force with less even no kinematic pair in the mechanism, the motivating mechanism of suction tube proposed in this paper can simplify the mechanical structure and control system observably, and reduce the cost of equipment manufacture and energy consumption. The research on the separating device has very important application value for the realization of scallop automatic manufacture.
Keywords:modeling; dynamics; experiments; vacuum suction device of scallop viscera separation; distributed-compliant arm; influence coefficient method
作者简介:李娜,女,河北保定人,博士,讲师,主要从事欠驱动机构、仿生机器人的研究。保定河北农业大学机电工程学院,071001。
基金项目:国家自然科学基金资助项目(51305125);河北省自然科学基金资助项目(E2013204110);河北省高等学校科学技术研究基金资助项目(YQ2013007)
收稿日期:2015-10-06
修订日期:2015-12-08
中图分类号:S985.3+6; TH113.2+2
文献标志码:A
文章编号:1002-6819(2016)-02-0244-08
doi:10.11975/j.issn.1002-6819.2016.02.035
猜你喜欢
空气动力学学报(2022年4期)2022-08-23 06:51:26
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:02
电子制作(2018年17期)2018-09-28 01:56:44
通信电源技术(2018年5期)2018-08-23 01:15:36
世界汽车(2017年8期)2017-08-12 04:39:15
汽车与安全(2016年5期)2016-12-01 05:22:16
太空探索(2016年12期)2016-07-18 11:13:43
广西林业科学(2016年1期)2016-03-20 05:33:17
浙江大学学报(工学版)(2015年2期)2015-05-30 07:04:53
火炸药学报(2014年1期)2014-03-20 13:17:22