三相PWM整流器控制策略研究及参数整定
2016-03-21 02:02张仰飞夏伟栋
浙江电力 2016年8期
徐 岩,张仰飞,夏伟栋,颜 辉
(南京工程学院电力工程学院,南京 211167)
三相PWM整流器控制策略研究及参数整定
徐 岩,张仰飞,夏伟栋,颜 辉
(南京工程学院电力工程学院,南京 211167)
以三相PWM整流器为研究对象,通过对整流器建立数学模型来分析其运行机理和控制策略。采用电压定向矢量控制方法确定控制策略为电压外环,电流内环的双闭环结构。通过研究整流器系统的电感L电容C的参数以及控制策略中PI调节器参数对直流侧电压响应和交流谐波与功率因数的影响,结合Matlab/Simulink仿真给出的波形图,经过观察输出响应的状态最终确定系统的参数。最后使用Matlab/Simulink软件来模拟故障并观察系统的稳定性,通过分析说明系统控制策略以及整定参数的可行性以及正确性。
PWM整流器;电压定向矢量;PI;Matlab
0 引言
与传统的整流装置相比较,PWM整流器因网侧电流谐波含量小、功率因数高、电能可双向传输等多方面的优点,被广泛应用于交流传动系统中[1-2]。PWM型变换器按电压源以及电流源将拓扑电路分成2类,控制方法主要有电压控制、电流控制以及功率控制。
电压控制策略是根据系统稳态下数学模型反应出的电压平衡关系,控制输出的电压幅值以及相位,再结合电网电压通过一定的转换来控制电流和功率[3-4]。经过研究表明,对PWM整流器及其控制技术的研究有助于提高电网质量,还可以补偿系统的无功功率、抑制谐波污染以及对电能的合理有效利用。
在本文的整流器控制环节中,采用的是电流内环和电压外环的双闭环结构的电压定向矢量控制方法,有1个电压外环的PI控制器还有2个电流内环的PI控制器的参数需要确定,只有设置合理的参数才能使系统获得良好的暂态和稳态响应性能。文献[5]-[8]介绍了多种参数整定的方式。本文在对PWM整流器建立数学模型的基础上进行分析研究,在Matlab仿真环境中对双闭环控制系统进行一定量的参数性能测试和分析工作,整定出一组合适的控制参数,最后通过故障仿真验证了参数的有效性和可行性。
1 PWM整流器数学模型
在研究中采用的是三相电压PWM整流器,桥路采用三相桥式全控整流电路,其主电路拓扑结构如图1所示。
设三相电网电压平衡,根据等效电路结构图可以得到电压电流方程并整理成一阶微分方程的矩阵形式为:
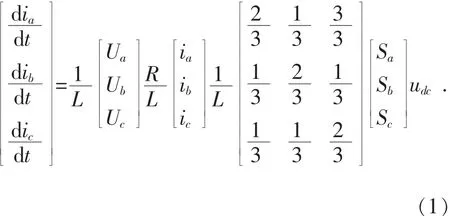
电流之间关系变换为:
式中:Sa,Sb,Sc分别为三相桥臂的开关函数。其中Sk=1;对应桥臂上管导通,下管关断;Sk=0对应桥臂下管导通,上管关断;(k=a,b,c)。
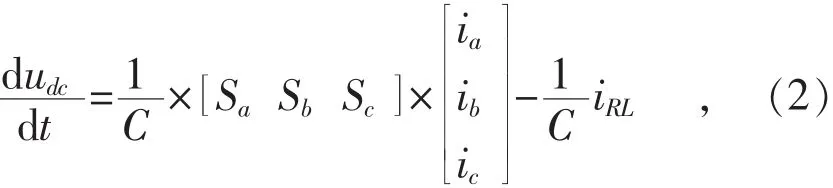
上述方程为PWM整流器在三相静止坐标系下的方程,由三相静止坐标系A-B-C变换到两相静止坐标系α-β是因为PWM整流器在αβ静止坐标系下是一个解耦系统。选择α轴和A轴重合,并且在保持磁势相同且功率不变的约束条件下,经过变换矩阵Tabc→αβ后,整流器数学模型变为:
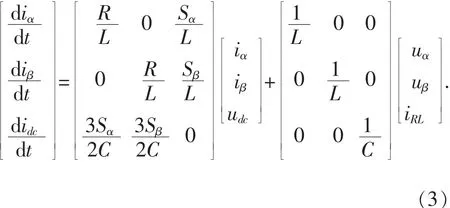
式(3)Sα和Sβ为PWM整流器在αβ静止坐标系下的开关状态量。
PWM整流器在两相同步速旋转dq坐标系中的数学模型为:

式中:Sd和Sq为PWM整流器在dq旋转坐标系下的开关状态量。ω=dθ/dt,角为两相旋转坐标系的d轴与三相静止坐标系的A轴的夹角。
2 PWM整流器控制策略
PWM整流器的控制目标是保持输出直流电压恒定且具有良好的动态响应能力。根据式(1)—(4)可知,只需要调节整流器输出电压的幅值和相位就能控制整流器交流侧输入电流的大小和与电网电压的相位角φ,输入电流的有效控制是整流器控制的关键。
在式(1)—(4)的数学模型中,令udr=Sdudc,uqr= Squdc,则电流公式可以写成:

此式表明轴d和q轴电流除受控制量udr和uqr的影响外,还要受到交叉耦合项ωLiq,ωLid和电网电压ud,uq的影响。这时,分别令:
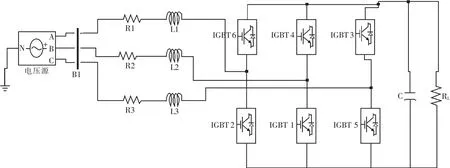
图1 三相电压型PWM整流器主电路结构
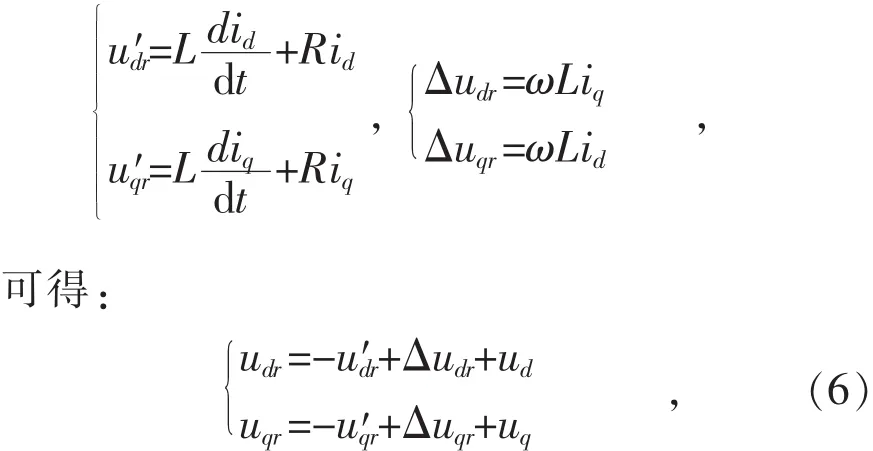
为了简化控制算法,采用电压定向矢量控制,将同步速旋转dq坐标系的d轴定向于电网电压矢量us方向上,us为相电压的幅值。设d轴与α轴的夹角为θu,θu=ωt,也就是us的相角,这样电网电压的d、q分量为ud=us,uq= 0,可以得到:

根据式(5)—(7)可以确定整流器的控制策略。整个控制系统为双闭环结构,外环为电压环,内环为电流环。
3 参数整定
在参数性能的评估中,重点关注的是直流侧的电压波形,同时为了方便调节,网侧的电流波形也同样需要观察。以图1的PWM整流器的主电路结构来看,需要确定的有网侧的电感L以及直流侧的电容C。当输入电压U确定时,也就是在整流器功率等级确定的情况下,电感和电容的参数有范围选择,通过Matlab仿真软件找到适合的参数。
在仿真中,取网侧相电压幅值Um=311 V,频率f=50 Hz,直流侧的负载等效电阻RL=30 Ω,网侧电阻R=0.1 Ω,开关频率为fs=10 kHz。分别对电感L取0.5 mH,1 mH,2 mH,3 mH以及4 mH,对电容C取2 000 μF,2 500 μF,3 000 μF以及3 500 μF。
观察直流侧电压波形,仿真结果表明,电感L和电容C的变化对直流侧电压波形影响比较大。电感L越大过冲越大,响应越慢,而电容C在变化时主要影响的就是过冲,在实际应用中,直流侧的电压过冲不能太大。综合考虑电压的过冲以及响应速度,最后确定电感L=2 mH和电容C=3 000 μF。
L和C参数确定后就需要确定控制策略中的PI调节器参数。实际使用中,对直流电压波形的调整主要是通过调节PI参数来完成的,只有当调整PI参数达不到目标的时候,才来微调L和C的取值。在工程中,d和q轴电流的2个PI调节器的参数往往取为相同,因此最后只需要确定2组PI参数即可,即电压环的Kup,Kui和电流环的Kip,Kii。
忽略网侧电阻R上的电压降,在考虑到实际工程中电感L上的电压降不高于网测电压的30%。根据公式可以推算得到Udc≥560 V,这时设定Udc=600 V。式中Ue和Ie为网侧单相中的电压电流有效值。PI参数的整定在理论上如式(8)所示。

式中:Ti为电流环的时间常数,取值为Ti=L/R; Kpwm为整流器的等效增益,其值大约为和PWM载波峰值的比率;Ts为电流环的采样周期;Tu为电压环的采样周期。
根据式(8)可以算的初始的PI参数为Kip=6.67,Kii=33.3,Kup=0.7,Kui=5.6。先固定3个参数,只调整1个参数,通过观察波形图来获得最佳的参数。对电压外环参数Kup和Kii,电流内环参数Kip和Kii,在仿真时主要在上述4个参数的计算值附近进行大量取值校验,观察直流侧电压波形。
通过比较发现Kup的增大能提高响应速度,减小调整时间,但是会增大超调量,过大的时候直流侧电压波形会发生畸变,选择Kup=1。随着Kui增大时,对过冲电压影响较小,主要影响直流侧电压Udc在第一次达到整定值600 V后下降的幅度,随着Kui的增大,下降的幅值也越来越大,稳定速度受到了影响。比较电压的波形以及达到整定值的速度,取Kui=6。
Kip上升到一定的程度后直流侧的电压波形基本不会变化,而减小时,电压波形波动比较大,超调量增加,电压波形不稳定,趋于稳定的速度比较慢,所以Kip的值不能太小。经过对比根据实际经验,电流环的参数一般比电压环大,最后取电流环Kip的参数为5。
随着Kii的增加,Udc的过冲相对来说也越来越大,但是对整个系统参数影响不大,主要改变的是系统的稳定速度。在实际中整定Kii参数一般是和Ku一起设定的。结合电压环以及电流环的参数整定Kii时候的电压波形,通过对比最后取的值为20。
4 仿真验证
为了验证控制策略以及整定的参数的正确性,利用Matlab软件分别模拟负载的突然切除故障、网侧电压骤降、网侧电压相角突然变化的情况,观察直流侧电压Udc的稳定性。
4.1 直流侧负载变化
为了模拟直流侧负载突然切除的状况,在PWM整流电路的主拓扑结构的负载电阻RL侧加上一个开关器件。仿真时常设置为2 s,在到达1 s的时候打开开关,模拟负载切除。经过运行,直流侧的电压波形如图2所示。
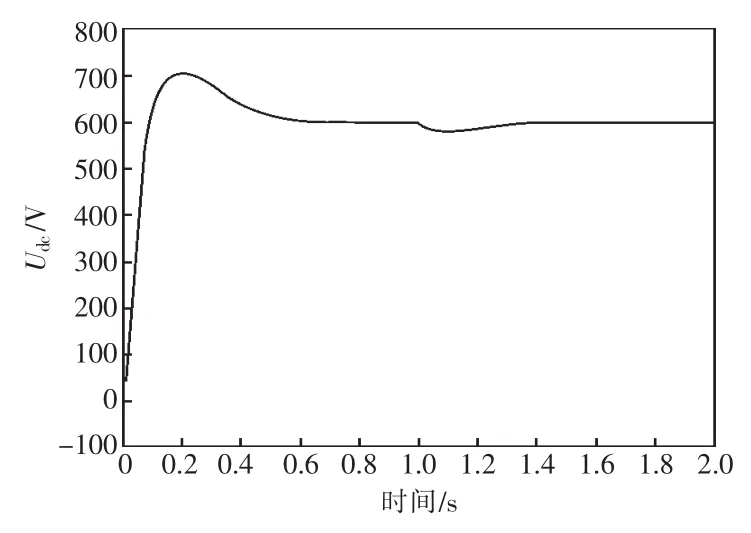
图2 负载变化时Udc的波形
由图3可以清楚地看到,当负载在时间1 s的时候变化时,电压Udc的波形出现明显跌落,经由控制系统的处理后,直流侧的电压波形又恢复到稳定,电流也进入新的稳定状态。由此可见控制策略是正确的,整定的参数也比较合理。
4.2 交流侧电压跌落
为了模拟交流侧电网电压的突然跌落,在仿真系统中再加入一个电源,电压幅值设定为初始电压的一半,并加上开关器件,在时间t为1 s的时候进行切换。仿真结果如图3所示。
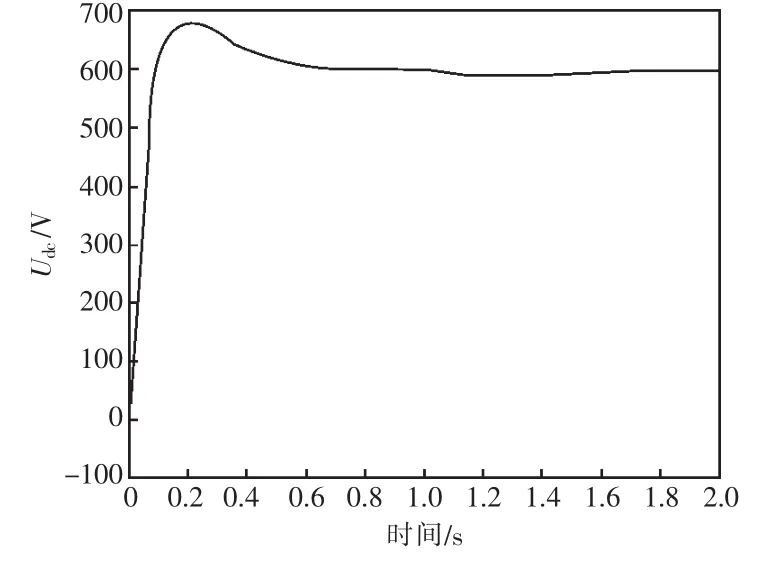
图3 电压变化时Udc波形
从图3可以看到,在时间t为1 s时,电压的大小下降为原来的一半,这时直流侧的Udc大小开始发生变化,在进过短暂的震荡后很快恢复稳定,这同样证明了控制策略的正确性以及整定的参数的合理性。
4.3 交流侧电压相角变化
模拟交流侧相角变化的主电路和电压骤降的电路结构一样,在设定第二个电源时,将相角值设定为60°,同样设定在时间t为1 s的时候变化。在仿真时发现,当相角变化时,直流侧电压Udc变化不明显,波形如图4所示。
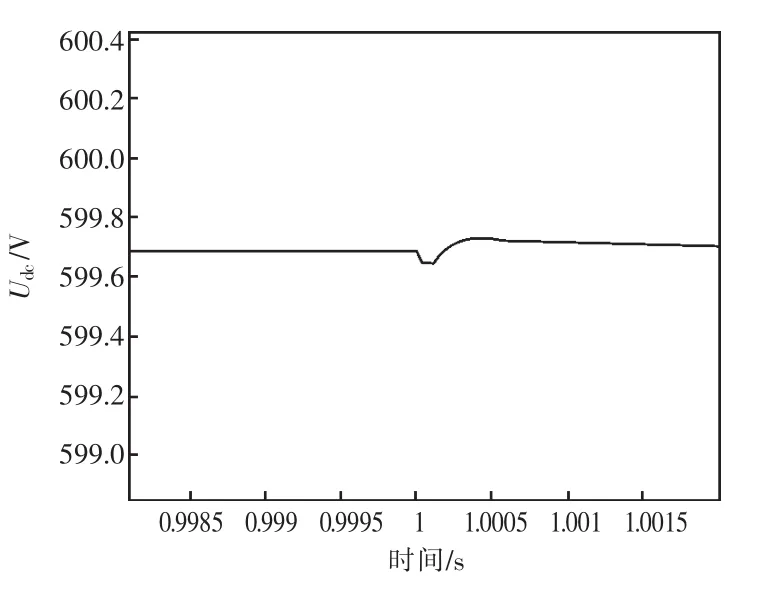
图4 电压相角变化时Udc波形
结合图4可以看到,当电压相角发生变化时,系统会跟着出现变化,但是变化十分微小,基本可以忽略不计。
通过上面几组故障仿真,结合直流侧电压Udc的波形,可见本文中的控制策略正确,整定参数合理。
5 结语
通过建立PWM整流器的数学模型,分析整流器的工作原理,在此基础上利用电压定向矢量控制方法研究PWM整流器的控制策略,推导出电流内环电压外环的双闭环控制策略结构图,在Matlab中搭建相应的模块。利用仿真结果来整定控制策略的参数值,最后模拟一些常见的故障,证明控制策略的正确以及整定的参数的合理性。根据仿真结果,能通过观察的直流侧Udc出现的问题来调整相应的参数,并为接下来的PWM整流器参数辨识奠定基础。
[1]徐金榜.三相电压源PWM整流器控制技术研究[D].武汉:华中科技大学,2004.
[2]程启明,程尹曼,薛阳,等.三相电压源型 PWM整流器控制方法的发展综述[J].电力系统继电保护与控制,2012,40(3)∶145-154.
[3]LEE KE YEN,WU YUE LIN,LAI YEN SHIN.Novel bidirectional three-phase rectifier without using DC-link current sensor[C].大功率变流技术,IEEE PESC,Korea,2006,6∶3302-3306.
[4]钟炎平,沈颂华.PWM整流器的一种快速电流控制方法[J].中国电机工程学报,2005,25(12)∶52-56.
[5]MENDEZ J,GARCIA Y,MATA M T.Three-phase power converter stabilization via total energy-shaping[C].IEEE Conference on Industrial Electronics and Applications,2006,1∶1-6.
[6]赵振波,李和明.PWM整流器 PI参数设计[J].华北电力大学学报,2003,30(4)∶34-37.
[7]张崇巍,张兴.PWM整流器及其控制[M].北京:机械工业出版社,2003.
[8]郑征,张子伟,张朋.三相电压型PWM整流器不平衡控制策略的研究[J].电气传动,2014,44(5)∶26-30.
[9]汪万伟,尹华杰,管霖.双闭环矢量控制的电压型PWM整流器参数整定[J].电工技术学报,2010,25(2)∶67-72.
(本文编辑:杨 勇)
Research on Control Strategies of Three-phase PWM Rectifier and Parameter Setting
XU Yan,ZHANG Yangfei,XIA Weidong,YAN Hui
(School of Electric Power Engineering,Nanjing Institute of Technology,Nanjing 211167,China)
Taking three-phase PWM rectifier as the research object,this paper establishes a mathematical model of PWM rectifier to analyzes operation mechanism and the control strategies.Voltage-oriented vector control method is used to determine a control strategy of double closed-loop structure-outer voltage loop and inner current ring.By studying the parameters of inductance(L)and capacitance(C)of rectifier system and response of PI controller parameter to DC side voltage as well as its impact on AC harmonic and power factor in the control strategy.In combination with waveform from Matlab/Simulink simulation,the system parameter is determined by observing status of the output response.Finally,Matlab/Simulink software is used for fault simulation and stability check of the system to demonstrate the feasibility and correctness of the control strategies and parameter setting.
PWM rectifier;voltage-oriented vector;PI;Matlab
TM461
A
1007-1881(2016)08-0026-05
2016-05-12
徐 岩(1992),男,硕士研究生,研究方向为电力系统运行及控制。
猜你喜欢
科学家(2021年24期)2021-04-25
防爆电机(2020年5期)2020-12-14
防爆电机(2020年3期)2020-11-06
哈尔滨铁道科技(2020年4期)2020-07-22
自动化学报(2019年12期)2020-01-19
新高考·高一数学(2019年4期)2019-09-07
电子制作(2019年23期)2019-02-23
电子制作(2018年1期)2018-04-04
电子制作(2017年19期)2017-02-02