
基于大数据的高速列车气动载荷作用下迭代学习主动控制研究
2016-03-17 01:55陈春俊何洪阳
计算机测量与控制 2016年2期
陈春俊,孙 宇,何洪阳
(西南交通大学 机械工程学院,成都 610031)
基于大数据的高速列车气动载荷作用下迭代学习主动控制研究
陈春俊,孙宇,何洪阳
(西南交通大学 机械工程学院,成都610031)
摘要:列车在高速运行的过程中与另一列车相交会时,将产生剧烈的瞬态气动载荷冲击而引起车体瞬间横向振动加剧,导致列车横向平稳性恶化;为了改善列车运行平稳性,采用大数据方法及迭代学习控制思想,提出基于高速列车运行大数据的迭代学习主动控制算法,并进行多体动力学与控制算法的联合仿真,进一步研究控制算法对会车气动载荷幅值变化和会车时间变化的鲁棒性;结果表明:大数据迭代学习主动控制经过5次迭代后对会车气动载荷激扰下的车体横向振动峰值降低52.67%,且控制算法对会车工况变化有较好的鲁棒性。
关键词:高速列车;气动载荷;大数据;迭代学习控制;主动控制
0引言
列车在低速运行时,轨道不平顺是影响车体横向振动的主要因素,随着列车运行速度提高,列车空气动力学效应加剧。尤其在交会及隧道通过时,车体受到剧烈的会车压力波与隧道压力波作用,产生瞬态气动载荷冲击而引发车体横向振动加剧,造成车体横向平稳性恶化[1-5]。研究表明高速列车主动与半主动控制是提高列车运行平稳性的有效方法[6]。但传统的主动、半主动控制方法主要是针对轨道不平顺激励下的车体振动而设计的,轨道不平顺激励下车体振动为平稳随机振动,而气动载荷激励下的车体振动为瞬态非平稳随机振动,传统控制方法由于控制算法和执行器频率响应的限制,难以取得很好的控制效果[7-9]。
随着多传感器融合技术、物联网技术、云处理技术的及电子存储技术的快速发展,迎来“大数据”时代。“大数据”被定义为:“超过了典型数据库软件工具捕获、存储、管理和分析数据能力的数据集。”目前,“大数据”技术的应用逐渐从金融、健康医护和气象监测领域向电力、运输、军事等多个领域渗透,出现了许多研究成果[10-13]。大数据方法将成为继理论分析、仿真计算及试验方法之后的又一种科学研究方法。
高速列车一旦投入到路局某条线路运行时,该列车将长时间在相同线路、相同运行工况下周期性的重复运行。在不断地重复运行的过程中,列车将产生包括运行状态、线路信息、会车压力波及隧道压力波、车体振动及舒适度等海量的准周期数据。如何充分利用这些准周期大数据提高列车安全性和舒适性,显得至关重要,也将会是未来研究的新方向。
针对上述问题,基于列车线路运行的大数据特点,提出基于大数据的迭代学习主动控制算法,并对气动载荷引起的车体横向振动进行控制。为会车压力波或隧道压力波作用下车体横向振动特性改善提供新的思路及解决方法。
1大数据迭代学习控制原理及过程
1.1大数据迭代学习控制原理
列车在同一线路上重复运行过程中,每次将重复与其它列车交会,并产生会车压力波带来的剧烈振动。为了能够有效控制交会瞬态气动载荷引起的车体振动,同时降低控制算法对执行机构响应要求,采用大数据迭代学习控制算法。
迭代学习控制适用于具有重复周期工作的被控系统,它的目标是实现有限区间上的完全跟踪任务。它通过对被控系统进行控制尝试,以输出信号与给定目标的偏差修正不理想的控制信号,使得系统的跟踪性能得以提高[14-15]。列车在交会的过程中产生的气动载荷会受到运行速度、交会车型、轨道线间距等情况的影响,每次交会的过程并不完全重复,并不能直接采用迭代学习控制。
高速列车作为高科技产品,列车本身安装了大量车载传感器,如运行速度、里程、位置、轴箱、转向架、受电弓、车内温湿度、车内压力波动等列车位置、运行状态及参数监测。在此基础上如进一步对列车车体振动、空气动力学参数进行长期运行的监测,列车长期运行的结果是大量传感器数据构成了该车的大数据信息。大数据中记录了列车交会时刻的速度、位置、交会时长、轨道情况、列车表面压力波、车体振动情况等数据。充分利用这些大数据,从中挖掘出列车交会的过程中的准周期数据,利用这些准周期会车信息结合迭代学习控制算法可实现列车的会车时列车平稳性。
基于大数据的列车主动悬挂迭代学习控制原理如图1所示,系统的主要组成包括:
1)监测系统:包括列车现有的车载传感器,及为实现主动控制而增加的加速度、气压等传感器。检测系统能够实时监测列车运行过程中的速度、位置、轨道情况、振动与气压等数据。
2)数据分析预处理系统:对采集到的大量数据进行匹配分析,从中提取出有当前状况的周期信息。
3)控制决策系统:包括运行数据检索与匹配系统和迭代学习两部分。通过读取实时数据与数据库中的历史数据,判断列车运行周期性数据,并根据以往的数据进行迭代学习,得到所需的控制量。
4)执行机构:主动悬挂系统的执行机构为作动器,安装在列车车体与构架之间,用于输出控制力。
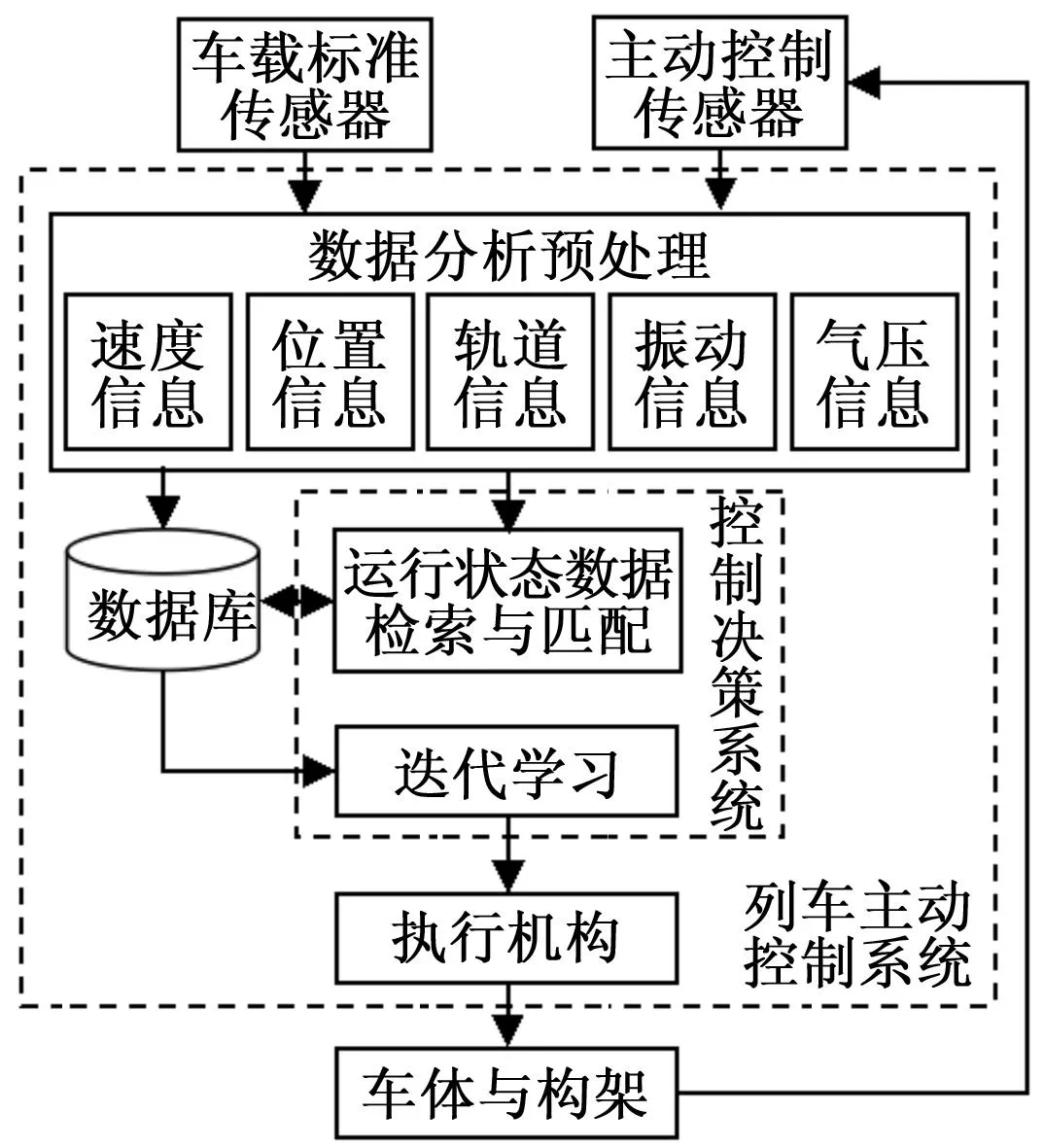
图1 基于大数据的列车控制原理图
列车传感器系统实时监测列车的速度、里程、车体表面气压、车体振动等信息,对列车交会进行预测和判断。当列车在开始交会时,控制系统根据工况匹配条件将采集到的数据与数据库中的历史数据进行对比,搜索出与本次交会工况最为接近的历史迭代数据,以此迭代学习计算出本次控制的输出,并保存控制的结果,为下次迭代提供数据。在列车长期运行的过程中不断重复该迭代过程,直到控制效果满足要求。
1.2迭代学习过程
传统迭代学习控制是用上周期数据和本周期计算出本次迭代的输出值,迭代过程以迭代次数k为迭代轴。而在大数据迭代学习控制中,本次迭代的输出并不一定是上一周期的数据,而是根据历史周期搜索匹配得到的,根据列车运行工况参数的不同,在计算的过程中存在多个参数的匹配以及历史最佳的控制周期为上一个迭代学习周期。
在大数据迭代学习中,对于第k次迭代,存在工况匹配条件fk(vk,sk,pk,ak),其中v为列车运行速度,s为列车运行里程,p为车体表面压力,a为车体振动加速度。根据工况条件f之间的相关度将整个迭代过程划分为多个迭代轴进行,对于同一迭代轴中的迭代输出和误差,可表示为:
式中,ui,f,ei,f为考虑了工况条件的迭代输出与误差,ρ(fi,fj)为fi与fj的相关度,ε为相关度阈值。
只要工况条件f的相关度达到预先设定的阈值ε,便可以认为两个工况之间是近似重复的,这样便可以根据前一次的迭代数据来计算本次迭代所需的控制输出。对于同一迭代轴,其迭代过程与传统迭代学习控制相同。
在选择迭代学习律时,在保证算法收敛性的基础上,需要考虑对系统的扰动具有一定的抑制能力,同时具有较快的收敛速度,采用二阶闭环迭代学习律。基于大数据的迭代学习律可表示为:
(1)
式中,i为工况条件f下的迭代次数;yd(t)为理想输出;ei,f(t)=yd(t)-yi,f(t)为跟踪误差;P0为闭环学习系数;Qj、Pj,j=1,2,…N,为开环迭代学习系数矩阵。
2系统仿真模型
2.1主动悬挂模型
列车横向主动悬挂是在列车被动悬挂的基础上,采用二系横向作动器代替二系横向阻尼器,通过输出控制力对车体横向振动进行控制。采用多体动力学软件UM建立列车动力学模型,同时考虑轮轨接触几何关系的非线性、横向止挡的非线性、抗蛇行减振器以及部分减振器的非线性特性,蠕滑力的计算采用Kalker非线性蠕滑理论。除弹性、阻尼元件外的各个部件均视为刚体,对于车体、构架和轮对分别均考虑横移、沉浮、伸缩、侧滚、点头和摇头6个自由度,单节列车的动力学模型共42个自由度。选用LMA型踏面作为车轮踏面,钢轨采用60 kg标准型钢轨,单节列车模型如图2所示。
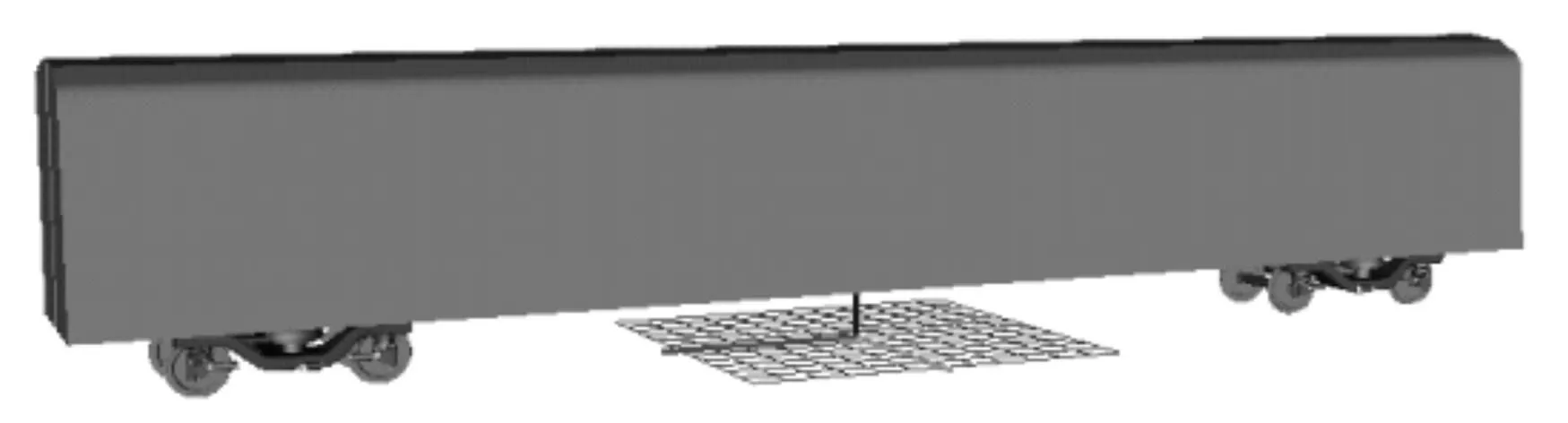
图2 车辆多体动力学模型
列车运行过程中,同时受到轨道不平顺和气动载荷激励,列车主动悬挂系统的动力学方程可写成如下形式[6]:
(2)

2.2气动载荷加载
两列车明线上350 km/h等速交会,其相对速度达到700 km/h,超过0.3马赫数,采用可压缩流三维瞬态的雷诺时均Navier-Stokes方程和κ-ε方程的湍流模型进行数值仿真,得到列车表面的压力分布。然后通过二次开发编程得会车气动载荷,即气动阻力Fx、气动侧向力Fy、气动升力Fz和侧滚力矩Mx、点头力矩My、摇头力矩Mz。
受论文篇幅所限,采用文献[1]和[2]中CFD仿真计算结果。气动力与气动力矩时域波形如图3所示,可知会车时间大约0.9 s,将上述气动力和力矩加载在车体上,同时对方程(2)进行求解,即可得到车体横向振动加速度。采用UIC作为轨道不平顺激扰谱,系统采样频率取1 kHz。
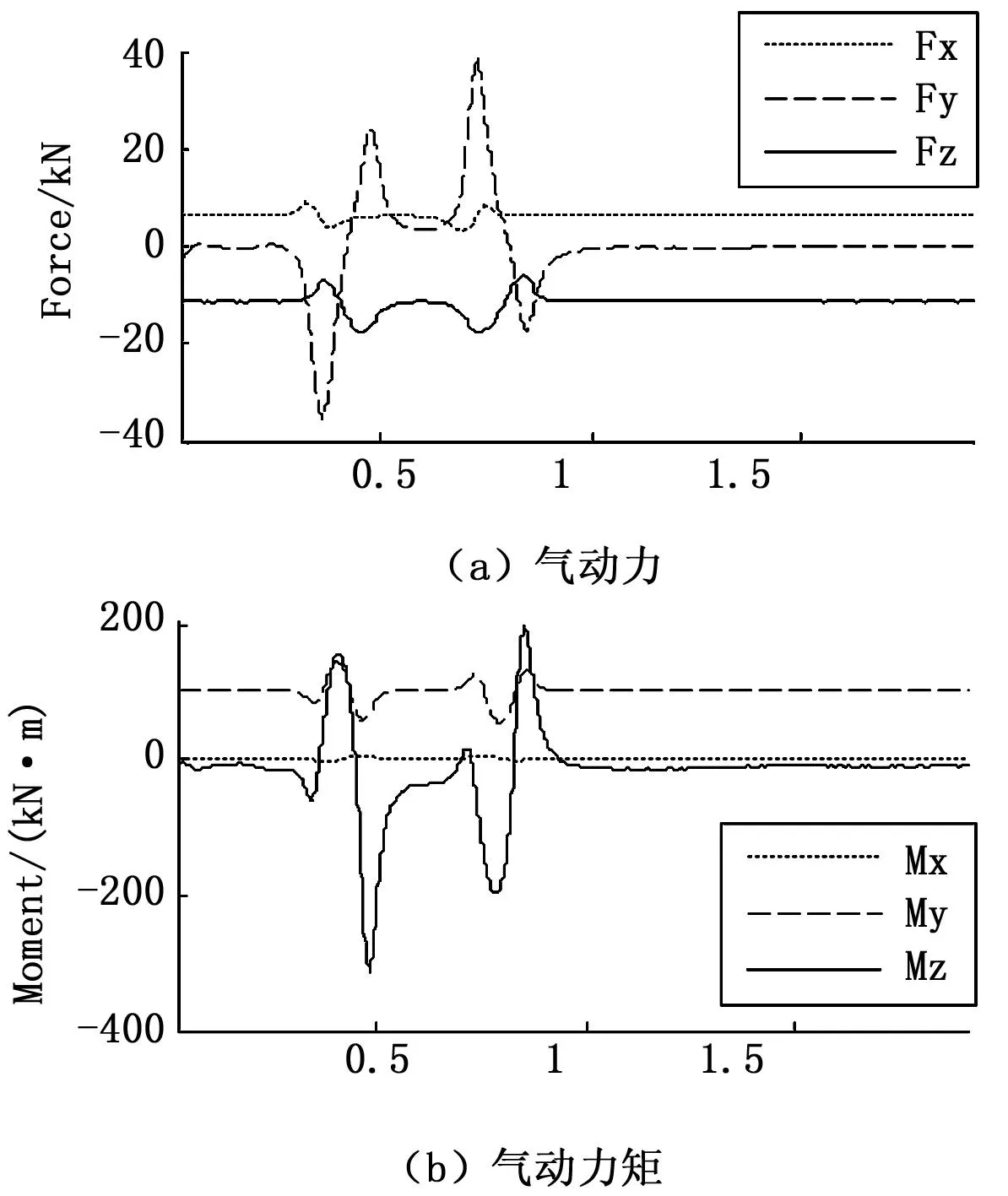
图3 气动载荷时域图
3仿真分析
3.1迭代学习控制与被动悬挂系统比较
根据大数据迭代学习控制的原理,实现多体动力学软件UM和MATLAB/SIMULINK的联合仿真。加载两列车以350 km/h速度级交会的气动载荷,仿真时间t=20 s。为了便于分析,仅考虑同一迭代轴的情况,假设列车在20 s的时间内经历了5次相同的交会工况,即每隔4 s加载一次相同的明线交会气动载荷,加载的时间分别为2 s、6 s、10 s、14 s与18 s。迭代学习控制的工作时间为从开始进入会车到结束会车的0.9 s。
设置迭代学习控制理想输出yd(t)=0,在保证收敛性的情况下,为加快收敛速度,经过不断试选,最终选择学习系数P0=2 000,P1=P2=1 500,Q1=Q2=6 000。其中二系横向阻尼值被动悬挂优化值Csy=20 kN·s/m,对比被动悬挂和主动悬挂迭代学习控制,结果如图4~6所示和表1所示。
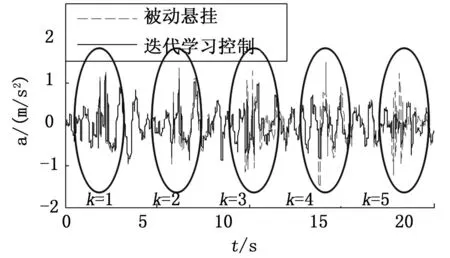
图4 迭代学习过程
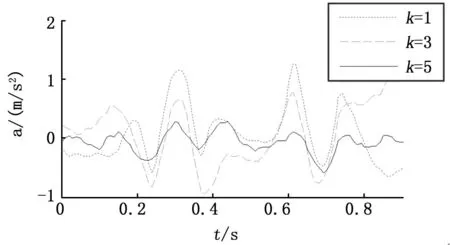
图5 车体振动加速度变化
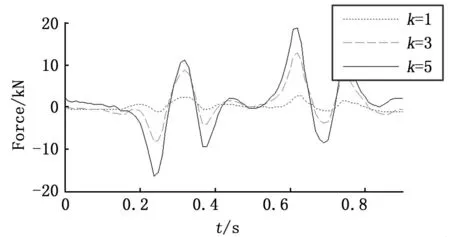
图6 输出力变化
采用基于大数据的迭代学习控制算法,在第一次进行交会时,迭代学习控制由于没有学习数据,其控制效果非常小。而随着迭代次数的增加,列车车体横向加速度峰值在不断降低。降低幅度从k=1时的0.02%到k=5时的52.67%。可见,迭代学习控制对车体横向振动有很好的抑制效果。
随着迭代学习的不断进行,车体振动加速度并不会达到期望轨迹yd(t)=0,这是因为除了气动载荷引起的车体振动,还包含了轨道不平顺引起的车体振动。由于迭代的过程只在气动载荷加载时进行,对轨道不平顺并无控制作用。
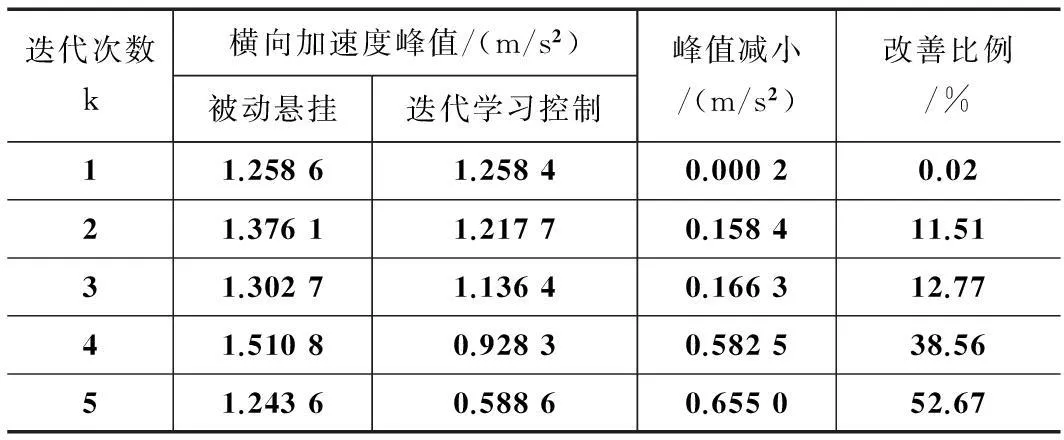
表1 迭代学习控制效果对比
3.2算法鲁棒性分析
3.2.1气动载荷幅值改变
气动载荷的大小会受列车车型、运行速度、轨道线间距等因素影响,而根据工况条件匹配到的历史工况与本次迭代的工况并不完全相同。为了研究在气动载荷幅值改变情况下,迭代学习控制的控制效果,取上一节中迭代得到的控制力,分别在气动载荷增大20%和减小20%两种情况下经行仿真分析。列车速度取350 km/h,仿真时间t=10 s,在5 s左右列车交会。
由图7和表2可知,气动载荷波形的幅值改变会对车体横向振动控制效果产生影响。采用基于大数据的迭代学习控制算法,当气动载荷幅值增大20%,横向振动改善50.97%;当气动载荷幅值减小20%,横向振动改善42.29%。可见在气动载荷出现变化时,根据之前的控制经验进行迭代,也能够很好地控制车体振动。
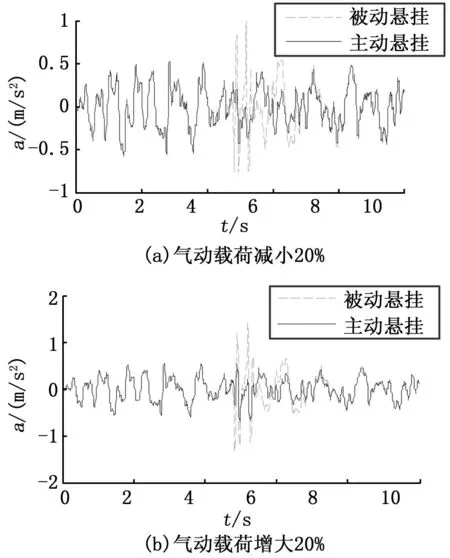

图7气动载荷幅值改变对控制效果影响
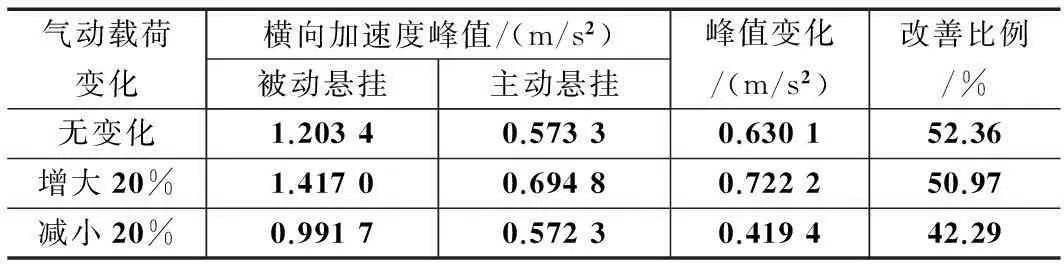
表2 气动载荷幅值变化前后控制结果对比
3.2.2周期时间误差
列车控制系统在判别列车运行状态的过程中,可能因为传感器误差等因素的影响而出现周期时间误差,使得作动器输出力超前或滞后。取10 ms和20 ms的延迟或超前进行仿真分析,其仿真结果如图8和表3所示。
从以上结果中可以看出,周期时间误差对控制效果有很大影响。当时滞达到20 ms时,加速度峰值仅能减小3.40%,但是与被动悬挂相比,在一些时刻仍有着很好的控制效果。
4结论
本文针对交会气动载荷作用下,车体横向振动加剧。为了提高列车横向平稳性,提出了大数据迭代学习主动控制算法,并对其控制效果与算法鲁棒性进行了分析,得出如下结论:
1)在350 km/h速度下,与被动悬挂相比,采用大数据迭代学习控制迭代到一定次数后,车体振动下降幅度超过50%。
2)在气动载荷增大20%和减小20%情况下仿真分析,主动控制对车体加速度仍有很好的控制效果,分别使加速度峰值减小了51%和42%。
3)周期时间超前或滞后的情况下,主动控制的效果受到了较大的影响,当时滞达到20 ms时,主动控制仅使加速度峰值下降了3.4%,但与被动悬挂相比,仍有着较好的控制效果。
图8周期时间误差对控制效果影响
结果表明,大数据迭代学习控制算法能够有效地减小交会气动载荷引起的车体振动,且在出现气动载荷定量变化和周期时间误差的情况下,仍能保持较好的控制效果,且算法具有较好的鲁棒性。
参考文献:
[1] 缪晓郎, 陈春俊, 李淼. 高速列车明线交会对列车的横向振动影响研究[J]. 铁道学报, 2014, 36(12):14-19.
[2] 刘小燕, 陈春俊, 何洪阳. 高速列车隧道会车时气动载荷的研究[J]. 机械设计与制造, 2014, 11(11): 161-164.
[3] MacNeill R A, Holmes B S, Lee H S.Measurement of the aerodynamic pressures produced by passing trains[A]. Proceedings of: JRC2002, The 2002 ASME/IEEE Joint Rail Conference[C].Washington D.C., 2002.
[4] 李雪冰,侯传伦,张曙光,等. 高速列车交会时的风致振动研究[J].振动与冲击, 2009, 28(7):81-84.
[5] 李人宪,关永久. 高速列车隧道会车压力波动问题[J].机械工程学报,2012, 48(20):127-134.
[6] 陈春俊. 高速列车主动与半主动控制[M]. 成都:西南交通大学出版社,2015.
[7] 李忠继, 戴焕云. 高速列车会车横向冲击的半主动控制研究[J]. 现代制造工程, 2010 (8): 23-27.
[8] Thomas D, Berg M, Stichel R P S. Improving crosswind stability of fast rail vehicles using active secondary suspension[J]. Vehicle System Dynamics, 2014, 52(7):909-921.
[9] Karkoub M A, Zribi M. Active/semi-active suspension control using magnetorheological actuators[J]. International Journal of Systems Science, 2006, 37(1): 35-44.
[10] Manyika J, Chui M, Brown B, et al. Big data: The next frontier for innovation, competition, and productivity[Z]. 2011.
[11] 李学龙, 龚海刚. 大数据系统综述[J]. 中国科学: 信息科学,2015,45(1):1-44.
[12] 贾丽, 严晞隽, 李聿渊,等. 大数据技术在指挥信息系统中的应用研究[A]. 第二届中国指挥控制大会论文集 [C].2014.
[13] 顾君忠. 大数据与大数据分析[J]. 软件产业与工程, 2013 (4): 17-21.
[14] 谢胜利,田森平,谢振东. 迭代学习控制的理论与应用[M]. 北京:科学出版社,2005.
[15] 杜寿兵,吴付岗. 迭代学习控制在配料控制系统中的应用[J]. 计算机测量与控制,2006,14(4):479-481.
Research on Big Data Based Iterative Learning Active Control on High Speed Train under Aerodynamic Loads
Chen Chunjun,Sun Yu,He Hongyang
(School of Mechanical Engineering, Southwest Jiaotong University, Chengdu610031, China)
Abstract:Strong transient aerodynamic loads will produced when a train passing another in high speed. The aerodynamic loads cause transient vehicle lateral vibration, which causes the deterioration of lateral stability. To improve the train running stability, big data method and iterative learning control were used and iterative learning active control algorithm based on high-speed train running big data was proposed. The co-simulations based on multibody dynamics and control algorithm were performed and even researched robustness of control algorithm when the magnitude of aerodynamic loads or intersection time varied. The results show that the big data based iterative learning active control through five iterations can make vehicle lateral vibration peak reduce 52.67% under aerodynamic loads, and control algorithm has strong robustness when intersection conditions change.
Keywords:high-speed train; aerodynamic load; big data; iterative learning control; active control
文章编号:1671-4598(2016)02-0118-04
DOI:10.16526/j.cnki.11-4762/tp.2016.02.032
中图分类号:U260.11
文献标识码:A
作者简介:陈春俊(1967-),男,四川蒲江人,教授,博士生导师,主要从事自动控制、高速列车气动性能测试、振动控制等方向的研究。
基金项目:国家自然科学基金(51475387, 51375403)。
收稿日期:2015-08-11;修回日期:2015-09-09。
猜你喜欢
科技资讯(2016年29期)2017-02-28
新闻世界(2016年10期)2016-10-11
科技视界(2016年20期)2016-09-29
中国记者(2016年6期)2016-08-26
计算机辅助工程(2016年3期)2016-08-01
科技传播(2016年7期)2016-04-28
