直线电机的二自由度双模糊PID 自整定控制器研究
2016-03-17 07:00余海涛
电气技术 2016年2期
程 帆 余海涛
(东南大学,南京 210096)
直线电机的二自由度双模糊PID 自整定控制器研究
程帆 余海涛
(东南大学,南京210096)
摘要直线电机在高精度直线运动场合作为驱动装置时,采用传统的PID控制难以满足精度和动态响应的要求。本文在结合模糊自整定PID控制和二自由度PID控制的基础上,提出了一种新型的基于目标值滤波型二自由度双模糊PID自整定控制器用以满足高精度场合下的直线电机控制。并通过Matlab/Simulink搭建了模型并进行了仿真,仿真结果表明:该控制器相比PID控制和模糊自整定PID控制具有更好的动态性能,具有较小的超调量和较快的响应速度,验证了设计方案的可行性。
关键词:直线电机;双模糊;PID;二自由度
直线电机作为高端数控机床的驱动装置,由于较高的效率和可靠性而得到了较快的发展。而在目前的直线电机伺服系统中,主要采用PID控制方式,该控制方式的主要优势体现在以下几点:结构简单、控制效果良好,硬件易于实现。但由于直线电机作为强耦合、非线性、多变量的复杂系统,简单的PID控制器难以满足高精度场合的动态性能要求。为了实现更好的控制效果,近年来快速发展的模糊控制就被引入到直线电机的伺服系统中[1],该方法同PID整定结合的模糊自整定PID控制器具有在线整定的效果,可以实现控制性能的优化。同时,目标值滤波型二自由度控制具有无需改变原PID控制器结构的特点,也是一种易于实现的提高PID控制精度的策略[2]。本文将上述两种控制策略相结合,提出了目标值滤波型二自由度双模糊PID自整定控制器,该型控制器的仿真结果表明其动态响应性能要优于PID控制和模糊自整定PID控制,具有较为理想的控制精度和响应速度。
1 直线电机的数学模型
直线电机的作用原理可以视为旋转电机沿半径方向剖开之后再沿直线展开,它的电压平衡、机械和电磁力方程如式(1)至式(3)所示:
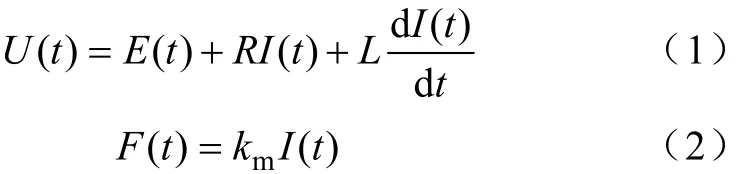

式中,

上式中各物理量的定义分别为:U(t)为电源电压,E(t)为反电动势,R为线圈导体电阻,I(t)为回路电流,L为线圈导体漏电感,kE为反电动势常数,x(t)为直线电机的位移,F(t)为线圈受到的电磁力,km为直线电机的力常数,m为直线电机动子的质量,c为直线导轨的粘滞摩擦系数,k为弹簧的劲度系数,V(t)为直线电机的直线运动的速度。

将上述三式进行拉普拉斯变换可得从而得到直线电机动态数学模型,如图1所示。
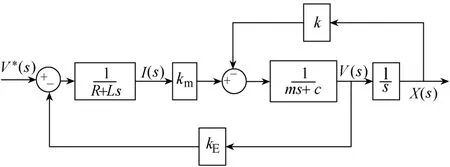
图1 直线电机数学模型
2 双模糊自整定PID控制器
传统的PID控制参数kP、kI、kD都是固定参数,通过三个参数的调整来实现控制性能的优化。但是在复杂的非线性系统中,很难保证整体优化的控制效果。而模糊自调整PID控制是在PID控制的基础上,通过模糊理论由输入量误差e和误差变化率ec计算出PID参数对应的调整量,从而实现PID参数的在线整定。该方法易于实现且误差动作的影响较小,所以可以较好地应用于直线电机的高精度伺服系统。图2是模糊自整定PID控制器的结构,该方法通过计算输入变量ec和e来得出kP、kI和kD的调整量,实现PID控制器的在线调整从而获得更好的控制性能。
双模糊控制器是在原有的模糊自整定PID控制器的基础上,为实现更好的动态性能和控制精度而采用的一种控制策略[3]。该策略主要用于解决响应速度和精度之间的矛盾,实现在偏差较大时的快速响应,较小偏差时稳态精度较高。双模糊控制器的结构图如图2所示,当偏差e大于或等于e0时,模糊控制器1作用;偏差满足e小于e0时,模糊控制器2作用,从而实现PID参数的“粗调”和“精调”的功能。

图2 模糊自整定PID控制器结构
对于偏差、偏差变化率以及控制量的语言变量模糊化处理采用如下7个变量来描述:正大PB,正中PM,正小PS,零Z,负小NS,负中NM,负大NB。模糊控制器1的误差和误差变化率的隶属度函数如图3所示,模糊控制器2的误差和误差变化率的归一化基本论域为[−3, 3]和[−1, 1]。
图3 双模糊自整定PID控制器结构

图4 偏差的隶属度函数

图5 偏差变化率的隶属度函数

图6 控制量(比例)的隶属度函数
模糊规则的推理采用Mamdamni直接推理法,对于PID参数的推理规则用如下语句:
Ri: if e=Ai and ec=Bi
Then kp=Ci and ki=Di and kd=Fi (i=1,2,3…)
其中e,ec以及PID参数的模糊子集为{NB,NM,NS,Z,PS,PM,PB},而对应的模糊规则见表1。
再将分别将模糊规则导入模糊控制器1和模糊控制器2,再选择e0作为模糊控制器的切换点。当e>e0,模糊控制器1产生作用;当e0<e0,模糊控制器2产生作用,从而得到双模糊控制器。

表1 模糊规则表
3 目标值滤波型二自由度控制
二自由度PID控制器是通过两组独立的PID参数控制来实现目标值跟踪特性和干扰抑制特性的平衡。相比于传统的单自由度PID控制器,二自由度PID控制器通过两组PID控制参数来控制系统的输出。目前较为常用的二自由度PID控制方式有前馈型二自由度PID控制方式,目标值滤波型二自由度控制和不完全微分型二自由度PID控制。其中,目标值滤波型二自由度PID控制的结构如图7所示。

图7 滤波型二自由度PID控制器结构
相比于其他的二自由度PID控制方式,目标值滤波型二自由度控制具有更易于实现的特点,只需在原有的单自由度PID控制器的基础上加上一个目标值滤波器即可实现二自由度的PID控制。而其中各个量的意义如下:α:比例增益二自由度化系数;β:积分时间二自由度化系数; γ:微分时间二自由度化系数。
在实际的应用场合中,一般只需要按照文献[4]的方法固定三个二自由度化参数即可实现二自由度控制器的设计。
4 系统仿真结果分析
本文仿真的对象是某型号直线电机,该型电机采用无铁心结构,详细参数见表2。

表2 无铁心直线电机的参数

图8 仿真结果比较
根据表2中的电机参数,在Matlab/Simulink中构建整个控制系统的模型进行仿真,本文对多种结构的控制器进行了仿真。包括无超调量的单自由度PID控制,采用模糊自整定PID控制,双模糊PID控制和二自由度PID控制。其中,本文的自适应PID控制器中的双模糊控制采用的切换点e0为0.5。在t=0s时施加速度信号为单位阶跃信号,t=4s时速度信号上升为1.1,得到仿真结果。
观察图中可以发现,采用模糊规则控制之后的响应速度得到了较大的提升,PID控制的调整时间约为1.5s,而模糊整定和本文的自适应控制器调整时间都下降到了0.5s左右。但模糊自整定的超调量较大,约为9%,并1.5s以后的稳态误差才达到了小于5%的水平;本文提出的二自由度双模糊控制,超调量为0.5%,并在0.5s左右达到误差小于1%的水平。而在t=4s施加速度变化信号后,二自由度的双模糊控制响应速度较快且速度波动较小,0.5s达到了稳定状态,效果优于PID控制和模糊自整定PID控制。
5 结论
本文提出了一种新型的自适应PID控制器。该控制器采用双模糊和目标值滤波型二自由度PID控制的结合来实现控制性能的优化,通过对误差和误差变化率的在线监测来调整PID控制参数,实现PID参数的在线整定,得到更好的控制效果。仿真结果表明:该新型控制器相比PID控制器和其他自整定PID控制器,具有更为理想的响应特性,调整时间和稳态精度都得到了有效提高。
参考文献
[1] 邹敏. 基于DSP的直线电机模糊PID控制系统研究与实现[D]. 武汉: 武汉理工大学, 2010.
[2] 安秋顺. 二自由度PID控制——第一讲基本型二自由度PID控制[J]. 冶金自动化, 1992, 04(4): 41-46.
[3] 刘洋, 王钦若, 陈思哲. 永磁同步电机双模糊自适应直接转矩控制[J]. 微电机, 2015, 48(2): 37-43.
[4] 杨龙, 左健民, 汪木兰, 等. 永磁直线同步电机的目标值滤波型二自由度PID控制[J]. 微电机, 2014, 47(10): 62-65.
[5] 李志军, 刘成颖, 孟凡伟, 等. 基于ZPETC和DOB的直线电机控制器设计及实验研究[J]. 中国电机工程学报, 2012, 32(24): 134-140.
程帆(1992-),男,硕士研究生,就读于东南大学电气工程专业,研究方向为电机控制理论。
Research of 2-DOF Bi-fuzzy Self-tuning PID Controller for Linear Motor
Cheng FanYu Haitao
(Southeast University, Nanjing210096)
Abstract Linear motor is generally used as the driving device in high precision situation, but the traditional PID control is difficult to meet the accuracy demand and the dynamic response of the motor. In this paper, based on the combination of fuzzy self-tuning PID control and two degree of freedom PID control, a new PID self-tuning controller with 2-DOF based on target value filtering is proposed. And Matlab/Simulink model has been built to simulate the controller. The simulation result shows that: comparing with traditional PID control and fuzzy self-tuning PID control ,by using this controller,both the dynamic performance and response speed has been advanced,and the maximum deviation is decreased as well,which verified the feasibility of the design.
Keywords:linear motor; bi-fuzzy; PID; 2-DOF
作者简介