“十二五”中国载人航天活动回顾
2016-03-17 10:51士元
国际太空 2016年1期
“十二五”中国载人航天活动回顾
The 12th Five-year Plan in Review: China's Human Spaceflight Activities
“十二五”期间,我国载人航天事业取得了辉煌的成果,最突出的表现是先后成功发射了天宫-1目标飞行器、神舟-8无人飞船、神舟-9和10载人飞船,使我国突破和掌握了自控和手控空间交会对接技术;把我国首位女航天员和首位太空女教师送上太空;开展了应用型飞行和在轨维修、绕飞等技术试验和一些重要的科学实验,顺利完成了载人航天工程第二步第一阶段任务。我国还按计划进行了天宫-2空间实验室、神舟-11载人飞船、天舟-1货运飞船、长征-5B和7运载火箭、大型空间机械臂等的研制,为在“十三五”期间进行的载人航天工程第二步第二阶段和第三阶段任务奠定了坚实的基础。
1 2011年我国载人航天相关活动
天宫-1目标飞行器升空
2011年9月29日,我国用长征-2F T1火箭成功发射了天宫-1目标飞行器。经过2次变轨后,天宫-1进入近地点355km、远地点362km的近圆轨道。此后,它又经历了在轨测试和交会对接准备2个阶段,在神舟-8飞船发射前进入约343km高的交会对接轨道,并建立了倒飞姿态。
天宫-1主要担负四大任务:一是先后与神舟-8、9、10飞船进行空间交会对接;二是实现“神舟”和天宫-1对接完成后组合体的控制和管理;三是为航天员提供在组合体内工作和生活所需的基本条件,开展相关的科学实验;四是进行空间技术试验,为未来空间站的建造进行先期的技术验证。
与“神舟”系列飞船相比,天宫-1具有体积大、寿命长、功能强、用途广的特点,是我国研制的一种全新的载人航天器,是空间实验室的雏形,具有小型试验性空间站的性质。它由实验舱和资源舱组成,质量约8.5t,总高度10.4m,最大直径3.35m,运行寿命2年。实验舱包括前锥段、圆柱段和后锥段,是航天员的工作舱和生活舱,由密封舱和非密封舱两部分组成。前锥段、圆柱段是密封舱,航天员活动空间达15.3m3,可满足3名航天员在舱内20天生活和工作需要。非密封后锥段安装对地遥感设备。实验舱前端安装了通信设备、交会测量设备和对接机构。资源舱为直筒构型非密封舱,舱外装有太阳电池翼和数据中继卫星天线,舱内装有控制力矩陀螺、推进剂贮箱、镍氢蓄电池以及环境控制气瓶等设备,尾部和侧壁装有2台490N轨控发动机和多台姿控发动机等装置,为天宫-1提供动力,进行姿态控制、变轨和制动。

“摇篮”中的天宫-1
神舟-8无人飞船升空
2011年11月1日,我国成功发射了神舟-8飞船,把它精确送入近地点约200km、远地点329km、轨道倾角为42°、周期5379s的运行轨道。它主要担负三大任务:一是作为追踪飞行器与天宫-1目标飞行器交会对接;二是实现载人飞船的定型;三是完成科学实验任务。
神舟-8的特点是在轨道舱前端安装了用于交会对接的测量、运动控制等设备和对接机构;增加了8台平移发动机和4台反推发动机;推进舱上的太阳电池翼发电能力比此前增加了50%;改进了降落伞和着陆缓冲系统;配备了运算能力更大的计算机等。
完成我国首次空间交会对接任务
我国首次空间交会对接任务分远距离导引段、自主控制段、对接段、组合体飞行段、再度对接段和分离撤离段共6个阶段实施。
1)在远距离导引段,神舟-8由测控通信系统导引进行了5次变轨,从初始轨道转移到与天宫-1共面的330km的近圆轨道。在天宫-1飞行第539圈、神舟-8飞行第28圈时,神舟-8位于天宫-1后下方约52km处,神舟-8稳稳地捕获了天宫-1,与其建立稳定的空空通信链路,神舟-8转入自主控制段。

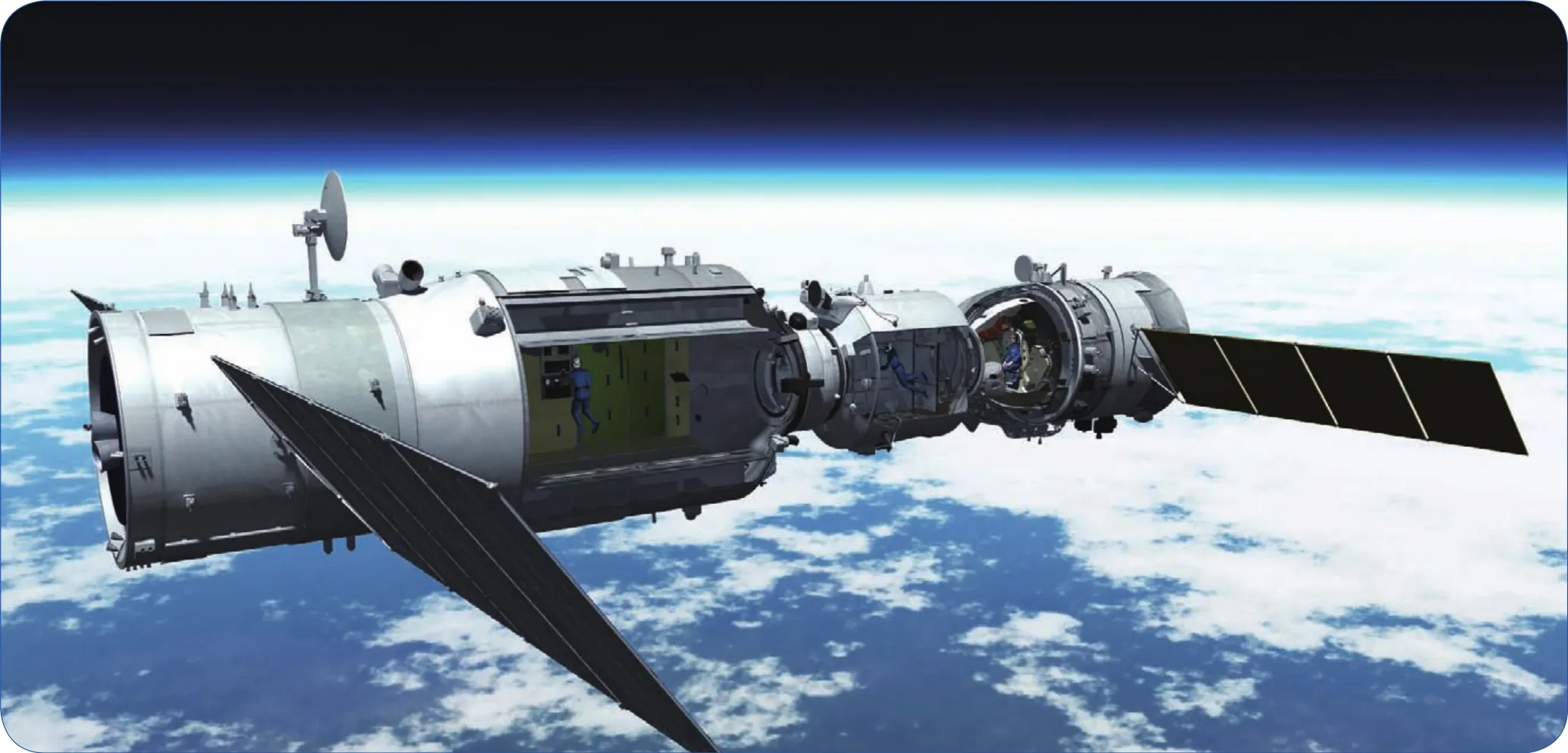
天宫-1与神舟-8空间交会示意图

春节期间,王跃与其他5名志愿者在舱内秀中国功夫
2)在自主控制段,神舟-8历经了寻的段(与天宫-1的距离从52km到5km)、接近段(从5km到140m)、平移靠拢段(从140m到对接机构接触),中间设立了4个停泊点(与天宫-1的距离分别为5km、400m、140m和30m)。
3)在对接段,神舟-8和天宫-1在8min内完成了捕获、缓冲、拉近和锁紧4个过程,于2011年11 月3日01:36实现了刚性连接,形成组合体,交会对接完成。
4)在组合体飞行段,由天宫-1负责组合体飞行控制,神舟-8处于停靠状态。
5)在再度对接段,组合体于2011年11月14日进行了分离和第2次交会对接试验,主要试验在不同的光照条件下空间交会对接的效果。第1次对接在阴影区进行,第2次对接在光照区举行。
6)在分离撤离段,再次对接的天宫-1-神舟-8组合体飞行2天后,于2011年11月16日再次分离,神舟-8飞船返回舱于2011年11月17日返回内蒙古主着陆场。
完成火星-500实验任务
2011年11月4日,我国志愿者王跃在完成火星-500(MARS 500)实验后出舱,出舱后王跃看上去依然神采奕奕。接着,王跃与其他5名志愿者接受了为期3天的全面体检和1个月的舱外实验,包括分析几名志愿者的尿液和唾液样本,研究精神压力对免疫系统的影响。王跃于2011年12月上旬回到国内。
王跃称,在520天中积累了大量的研究数据,对于密闭环境下人的自身极限能力的认识有了新突破。由中方组织参与的中医项目、生物节律与氧化应激项目及心理项目均达到了预期目的,初步获得了对长期密闭环境中人体整体功能状态的中医辨证、人体生物节律和氧化应激的规律性认识,了解了不同文化背景下乘组相容性特点,积累了长期载人航天飞行中的医监技术经验。同时,这次实验也是学习国外有益经验的很好方式,积累了大型国际实验的组织经验,掌握了如何在国外长期连续参试、如何建立精干高效的试验队等。
2 2012年我国载人航天相关活动
神舟-9载人飞船升空
2012年6月16日,我国成功发射了载有男航天员景海鹏、刘旺和我国首位女航天员刘洋的神舟-9飞船。其中,01号航天员景海鹏是指令长,全面负责乘组和任务完成;02号航天员刘旺的工作重点是完成神舟-9与天宫-1的手控交会对接;03号航天员刘洋则主要负责航天医学实验和空间试验管理。神舟-9还搭载约300kg的物品,其中以食品为主,此外还包括一些实验物品。本次任务主要包括三个方面:一是进一步验证自动控制交会对接技术,并首次验证手动控制交会对接技术;二是全面验证组合体的环境保障情况;三是验证在神舟-8基础上进行过改进的神舟-9飞船性能。

景海鹏、刘旺、刘洋(从右至左)在模拟器内进行手控交会对接训练

我国第1位女航天员刘洋出舱
神舟-9载人飞船准确入轨后,经地面远距离导引和自主控制飞行,于2012年6月18日在距地面高度343km的近圆轨道上,与天宫-1目标飞行器成功实现自动控制交会对接,形成组合体。同一天,航天员景海鹏率先成功进入天宫-1,随后,刘旺、刘洋依次进入。6月24日,天宫-1与神舟-9组合体分离,载有3名航天员的神舟-9自动撤离至距天宫-1目标飞行器400m停泊点处。随后,神舟-9以自动控制方式逐渐接近天宫-1,至140m停泊点后神舟-9飞船转由航天员刘旺手动控制。在航天员景海鹏、刘洋的密切配合下,刘旺操作姿态控制手柄和平移控制手柄,控制神舟-9向天宫-1接近,成功进行了手动交会对接,第2次形成组合体,航天员再次进入天宫-1。在组合体飞行期间,3名航天员在轨正常工作和生活,开展了一系列的空间科学实验和技术试验。6月28日,航天员刘旺手动控制神舟-9与天宫-1再次分离,并撤离至140m停泊点,飞船转入自主控制,继续撤离至5km外安全距离,并开展了重入自主控制至140m停泊点的交会飞行试验。6月29日,神舟-9进入返回程序,于当天准确降落在预定区域。天宫-1抬高运行轨道,进入高度约370km的长期运行轨道。
通过实施神舟-9任务,我国载人航天实现了多个首次,例如:首次实施了航天员手控交会对接,首次考核了飞船手动控制系统;首次进行了航天员访问在轨飞行器,在轨飞行10余天,这也是我国载人航天有史以来最长的一次;首次实现了地面向在轨飞行器进行人员和物资的运输与补给,首次考核了天宫-1支持保障航天员工作生活的能力;首次安排了女航天员执行任务,填补了我国在女航天员选拔训练、医学监督和保障以及女航天员乘员设备等方面的空白。航天员在太空飞行期间做了一系列的科学实验和技术试验,突破了一系列的关键技术,取得了一大批宝贵的试验数据,为我国载人航天技术发展奠定了基础,使我国对太空的认识、对载人航天规律特点的认识更加深刻全面。
天宫-1与神舟-9载人交会对接任务全面实现了“准确进入轨道、精准操控对接、稳定组合运行、安全健康返回”的总目标,称得上结果圆满、过程完美、成果丰硕。
我国首次受控生态生保系统集成试验成功
2012年12月2日,中国航天员中心试乘员唐永康、米涛走出密闭实验舱门,圆满完成了为期30天的我国首次受控生态生保系统集成实验。此次实验验证了我国自主研制的受控生态生保系统集成实验平台,标志着中国航天员中心在受控生态生保技术研究领域迈出重要一步。
开展长时间、远距离和多乘员的载人深空探测和地外星球定居是未来航天技术发展的必然方向,而建立受控生态生保系统是解决其生命保障问题的根本途径。为此,中国航天员中心于2011年首次在我国建成了受控生态生保系统集成实验平台。它利用植物的光合作用,一方面为乘员提供所需氧气,同时净化他们呼出的二氧化碳,完全实现大气的“自给自足”,专业术语称为达100%的大气闭合度。
在密闭实验舱内的30天里,唐永康、米涛生活在总面积54m2的密闭舱内,模拟了航天员在太空的生存环境。他们每天06:30起床,23:00睡觉,在18m2的乘员舱吃饭、睡觉、健身(蹬自行车、拉拉力器)和上网,做心理学、中医等方面科学实验。密闭舱内还有36m2的植物培养舱,种植了4种蔬菜。本次实验选择的生菜等4种蔬菜的氧气转化效率最优。乘员舱和植物培养舱的空气是互相流通的,植物培养舱的植物通过光合作用,净化乘员舱内乘员呼出的二氧化碳,使舱室内的氧气和二氧化碳保持动态平衡。
“神舟”飞船应用的是第一代“非再生”生保系统,从天宫-1起已逐步纳入第二代“物理化学再生式”生保系统。它们均使用高压氧气瓶供氧或电解制氧,维持航天员生命,使用化学药剂净化航天员呼出的二氧化碳。此次实验标志第三代生保系统取得阶段性成功。下一步还需实现饮用水的“自给自足”,并让排泄物进入生态循环系统。而未来用植物供氧的太空舱内,舱体内的氧气完全由其搭载的4种蔬菜产生。高压氧气瓶和制氧药剂将成为应急物品,只在二氧化碳浓度超限时使用。
3 2013年我国载人航天相关活动
2013年6月11日,我国成功发射了神舟-10载人飞船,将男航天员聂海胜、张晓光和女航天员王亚平送入天宫-1目标飞行器。

王亚平与学生互动
神舟-10总共完成了四大任务:一是为天宫-1提供了人员和物资天地往返运输服务,进一步考核了交会对接技术和载人天地往返运输系统的功能性能;二是进一步考核了组合体对航天员生活、工作和健康的保障能力,以及航天员执行飞行任务的能力;三是进行了航天员空间环境适应性和空间操作工效研究,开展了空间科学实验和航天器在轨维修等试验,首次开展我国航天员太空授课活动;四是进一步考核了工程各系统执行飞行任务的功能、性能和系统间协调性。
在天宫-1实验舱内进行的太空授课是此次任务最大的亮点。此次太空授课由王亚平担任主讲,聂海胜辅助授课,张晓光担任摄像师,地面课堂设在中国人民大学附属中学。在太空授课中,航天员们分别进行了质量测量、单摆运动、陀螺、水膜和水球共5项太空科学实验,展示了失重环境下物体运动特性、液体表面张力特性等物理现象,并通过视频通话形式与地面课堂师生进行了互动交流,从而加深了青少年对质量、重量以及牛顿定律等基本物理概念的理解,极大地激发了广大青少年对航天的兴趣。
另外,神舟-10航天员对天宫-1进行了在轨维护,拉开了我国航天器在轨维修的序幕。航天员拆除了天宫-1原来铺设的软质地面材料,更换上硬质地板和新的限位装置;对天宫-1上的密封圈进行更换。航天员掌握各种在轨维修航天器技术,对于开展长期载人航天活动,保障载人航天安全具有重要作用。
神舟-10飞船和以前“神舟”飞船飞行的最大区别是首次进行了应用性飞行和绕飞,为我国未来空间站的建造储备了技术、奠定了基础。所谓应用性飞行就是完成正常的天地往返运输任务。此前,我国发射“神舟”飞船的主要目的是考核和验证飞船,每次发射的飞船都有一些变化。而与神舟-9相比,神舟-10没有新的、大的技术变化,只做了一些小调整,其技术状态基本固化。神舟-10的任务已不再是试验飞船本身,而是投入正常运营,完成运输任务,为天宫-1提供人员和物资运输服务。
掌握绕飞技术对于未来建造我国的空间站非常重要,因为我国在2020年左右建成的空间站上有多个对接口,所以“神舟”飞船不一定从一个方向去与空间站交会对接,可能需绕到另一个对接口与空间站进行交会对接,因此需掌握宇宙飞船的绕飞技术。为此,在神舟-10飞船上还增加了一项用于绕飞的制导功能,用于飞船在“追吻”天宫-1时能够绕轨进行顺追和逆追。神舟-10航天员通过操纵飞船返回舱内的“姿态控制手柄”和“平移控制手柄”改变了飞船的飞行速度和方向,从而灵活自如地实现对天宫-1的绕飞。
在圆满完成预定任务后,神舟-10航天员于2013年6月26日安全返回地面。他们共在太空生活和工作了15天,这是目前我国载人航天活动时间最长的一次,也是我国航天员承担各类任务最多的一次。此次任务完成后,我国载人航天“三步走”的第二步第一阶段圆满结束。

神舟-10航天员张晓光、聂海胜、王亚平(从左至右)自主出舱后挥手致意
4 2014年我国载人航天相关活动
2014年中国月宫-1实验圆满完成。5月20日,北京航空航天大学3位实验志愿者谢倍珍、董琛、王敏娟从月宫-1密闭舱中走出来。至此,月宫-1为期105天的科学实验获得圆满成功,标志着月宫-1成功完成我国首次长期多人密闭实验。

月宫-1舰长谢倍珍(中)、乘员王敏娟(右)、董琛(左)出舱前在植物舱内合影
月宫-1的全称为“月球基地生命保障人工闭合生态系统地基实验装置”,由北京航空航天大学研制,用于开展月球基地生命保障系统的地基实验研究。它基于生态系统原理,将生物技术与工程控制技术有机结合,构建由植物、动物、微生物组成的人工闭合生态系统。人类生活所必需的物质,如氧气、水和食物,可以在系统内循环再生,并为乘员提供类似地球生态环境的生命保障。人进入这个人工生态系统中,便成为生态系统的消费者链环,同时可发挥控制者的功能,构成人工闭合生态系统(MCES)。
该密封系统在实验运行期间,与外界不发生气体交换。它由1个综合舱(42m2)和2个植物舱(每个58m2,三层立体栽培,种植面积69m2)组成,总面积为160m2,总体积500m3,可以为3位志愿者提供生命保障。

“天舟”货运飞船1∶3模型
月宫-1的核心为生物再生生命保障系统(BLSS),这是目前世界上最先进的闭环回路生命保障技术,也是未来人类实现在外太空长期生存的核心技术。其特点是可不再需要或很少需要地面物质支持,氧气、水和食物在系统内通过生物技术实现再生,乘员可长期在站内工作和生活,使得长期载人航天和行星探测成为可能。在105天里,维持3位志愿者生存所必须的氧气和水都是通过系统循环来供给的,而除了试验前舱内存储的一部分熟食外,其余食物也都是通过系统提供的。在封闭试验期间,志愿者进行作物种植和食品加工活动,产生的废弃物则通过生物技术处理转化为用于植物栽培的养分,这次实验实现了系统内循环再生100%的氧气和水以及55%食物,系统的总闭合度达到了97%。
月宫-1是我国建立的第一个、世界上第三个生物再生生命保障地基有人综合密闭实验系统,它使我国在生物再生生命保障领域的研究水平进入国际最先进行列,对保障我国载人登月、月球基地及火星探测等航天计划的顺利进行、保障航天员生命安全和生活质量具有重大意义。

地外天体采样机械臂
5 2015年我国载人航天相关活动
天宫-2空间实验室完成阶段总装标志性节点
据中国航天科技集团公司网站2015年1月3日报道,天宫-2空间实验室空间应用系统载荷设备完成了安装并交付电测,这是空间实验室本阶段总装的标志性节点。与天宫-1目标飞行器相比,天宫-2空间实验室上搭载了全新配套的空间应用系统载荷设备,无论配套设备数量还是安装复杂度均创新高。
2015年3月4日,中国载人航天工程总设计师周建平在接受记者专访时表示,天宫-2空间实验室的发射准备工作进展顺利,将于2016年发射。它将用于验证空间站的技术,也将接受航天员的访问。他表示:“天宫-2入轨并完成在轨测试后,将与之后发射的神舟-11载人飞船完成交会对接。航天员在天宫-2上生活的时间将比在神舟-9、10生活的时间更长。” 在天宫-2发射之前,中国将在海南发射场发射新研制的长征-7运载火箭试验箭。在天宫-2发射后,长征-7运载火箭将被用于发射“天舟”货运飞船。
自主研制机械臂性能优良
2015年11月在北京举行的2015世界机器人大会上,展示了我国研制的大型空间机械臂和地外天体采样机械臂。我国大型空间机械臂长达10余米,有7个关节,具有自主爬行及扩展能力,灵活性高,可达范围广,能同时实现大范围大负载操作以及局部精细化操作;采用机、电、热多技术高度集成的一体化关节,实现了大负载自重比设计;针对复杂的空间环境,突破了高速轻载与低速重载传动机构空间润滑和寿命验证方法;采用组合气浮与悬吊零重力模拟等方法,实现了大型机械臂的地面验证;机械臂可头尾互换,可实现机械臂大范围空间的灵活应用,通过爬行达到每一个角落,大大降低空间机器人及其辅助系统的质量,最大程度地扩大了机械臂的活动范围;承载的范围非常宽,鸿毛能拿,数十吨重的东西也易如反掌;无论高速还是低速,无论负载重还是负载轻,都能保持动作连贯,协调轻盈,适应空间在轨的不同任务。
地外天体采样机械臂不仅能够进行样品采集,还可完成容器转移等一系列样品采集任务;采样范围大,整臂末端操作精度高,样品获取能力强,具有很强的着陆姿态适应性,确保采样的精度和范围;可利用携带的工具,通过铲、挖等多种方式获取地外天体表层样品。
士元/文
猜你喜欢
军民两用技术与产品(2021年10期)2021-03-16
汽车维修与保养(2020年11期)2020-11-23
中学课程辅导·教育科研(2019年3期)2019-09-10
煤矿安全(2019年2期)2019-03-20
太空探索(2016年9期)2016-07-12