
基于模糊规则的机床主轴系统驱动策略
2016-03-16 02:20尹洋,王宇,赖啸
西华大学学报(自然科学版) 2016年1期
尹 洋, 王 宇,赖 啸
(1. 西华大学机械工程学院, 四川 成都 610039;2. 宜宾职业技术学院,四川 宜宾 644003)
基于模糊规则的机床主轴系统驱动策略
尹洋,1王宇,1赖啸2
(1. 西华大学机械工程学院, 四川 成都 610039;2. 宜宾职业技术学院,四川 宜宾 644003)
摘要:在使用经验与知识的前提下,依据机床驱动形式选择的主要步骤,应用模糊理论,提出一种基于模糊设计规则的主轴系统驱动方式的选择方法。将设计的驱动策略集成在主轴系统智能设计中,经过某大型机床企业的实际应用,取得了较好效果,从而验证了该系统原理及实现技术的可行性和实用性,提高了产品的设计质量和设计效率。
关键词:智能设计;模糊判决; 隶属函数
智能设计是将计算机与人的决策功能有机结合在一起,利用基础的设计知识进行设计,对设计知识进行获取、表达、提炼、存储、管理、推理等[1]。这种技术一般用于某个零件的设计或包含零件较少、复杂程度较低的设备中;然而,对复杂结构的设备,由于表达知识结构较为复杂,目前应用智能设计还不成熟,很多问题处于探索中[2]。实际上,由于复杂设备的设计过程所需的时间会更长,所以,对比较复杂的设备实现智能设计技术会更具有实际应用价值。主轴系统正是加工中心中重要的较为复杂的功能部件之一,其设计的成熟性与周期很大程度上取决于经验和知识的应用。随着数控机床的高速发展,传统的设计与分析方法已无法满足数控机床发展的要求;因此,开展数控机床主轴系统的智能设计方法的研究,已成为主轴系统研究的主要方向,也是急需解决的课题之一。本文针对加工中心主轴系统提出了智能设计关键技术之一——基于知识的模糊理论的主轴驱动策略,该项技术为主轴系统智能设计增添了新的内容,使主轴系统设计真正实现智能化。
1主轴系统驱动模糊逻辑选择模型
1.1 相关知识
1)论域U,连续的或离散的某些对象的集合,u是U的元素,写作U={u}。
定义[3]模糊集合(fuzzy sets),论域U到[0,1]区间的任意映射μF,即μF:U→[0,1],都确定U的一个模糊子集F,μF称为F的隶属函数或隶属度。也就是说,μF表示u属于模糊子集F的程度或等级。在论域U中,可把模糊子集表示为元素u与其隶属函数μF(u)的序偶集合,记为

(1)
若U为连续,则模糊集F可记为
(2)
若U为离散,则模糊集F可记为
F=μF(u1)/u1+μF(u2)/u2+…+μF(un)/un=

(3)
2)重心法解模糊。
模糊判决(defuzzification)或解模糊:在由推理得到的模糊集合中选取一个最能代表该模糊集合的单值的过程。本文选用重心法得到单值输出。
重心法,取模糊隶属函数曲线与横坐标轴围成面积的中心作为代表点。理论上要计算输出范围内一系列连续点的重心,即

(4)
实际上是计算输出范围内整个采样点的重心。
1.2 驱动类型选择
本设计将模糊理论应用在驱动方式的选择上。
这里采用隶属函数模糊化,利用Mamdani推理,将推理结论的模糊集合中隶属度最大的元素作为输出值。若隶属函数曲线形状呈梯形,则就可能不只有一个最大隶属度的元素,这时要对所有取最大隶属度的元素求其平均值,归并后采用重心法得到模糊判决。主轴驱动模糊判决过程如图1所示。
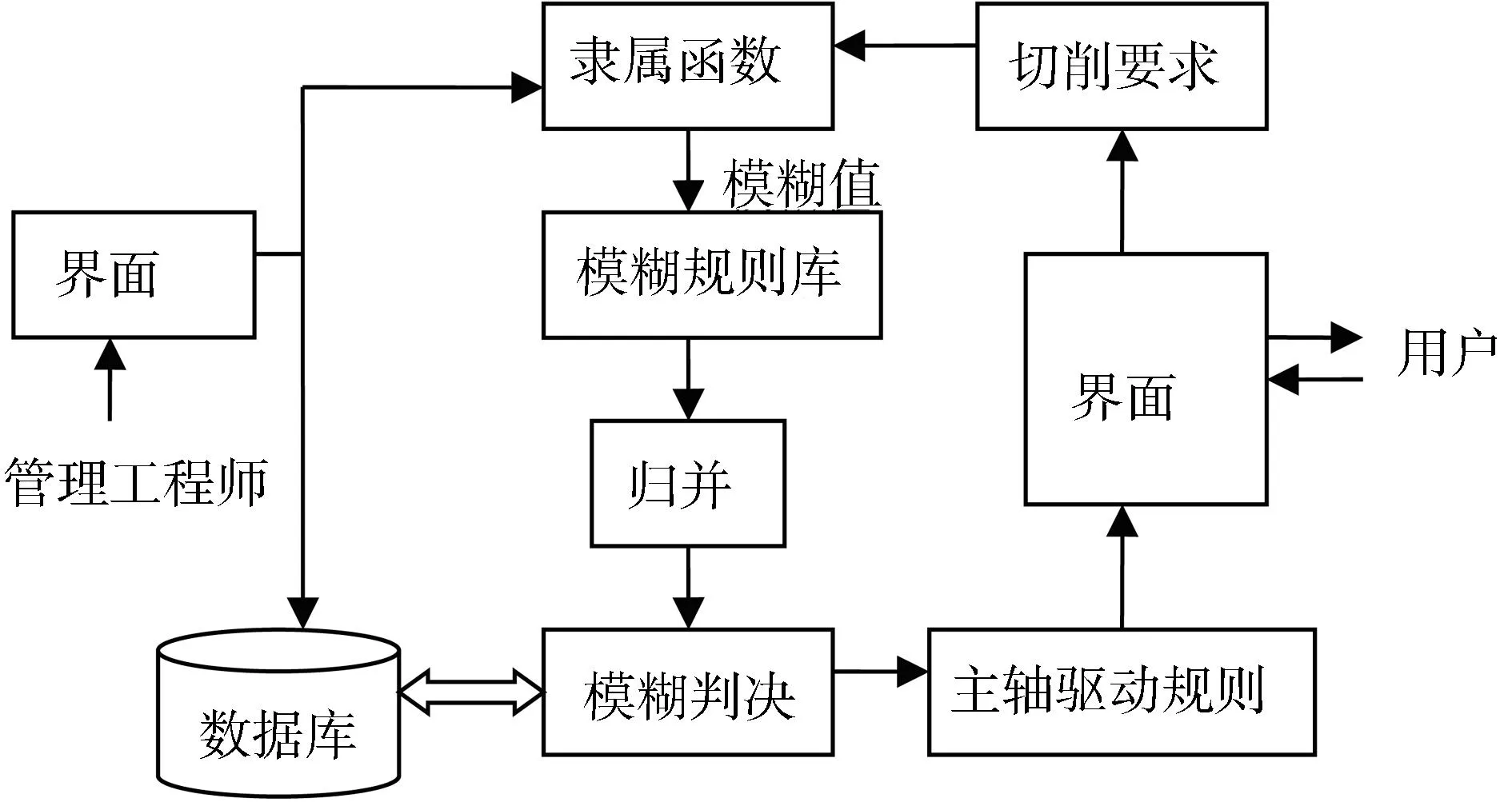
图1 主轴驱动方式模糊判决流程
从实践的观点看,消费者受到心理需求的影响,有着不确定性、概念模糊性,经常以语义的形式表示客户需求[4]。基于模糊集理论的模糊分析在以语义表示的术语上获取不确定性语义有一定的优势,能方便处理来自客户和设计者定性的或者不精确的输入[5]。研究结果表明模糊集分析已经在多目标或多标准的决策问题上成为一个有用的工具[6-7]。转矩可以经电机通过多种方式传递给主轴。常见的主轴驱动形式主要有4种:齿轮驱动、皮带轮驱动、主轴电机直接驱动、内装电动机主轴。这几种驱动特性常用的语义形式陈述如表1所示。

表1 驱动形式与驱动特性的关系

表1(续)
其驱动形式的选择需要经过以下几步。
步骤1:通过给定切削条件估计所需切削力矩和功率。瞬时切削力矩Tc由下式[8]估算得到:

(5)
式中:D为铣刀直径;N为刀具齿数;φj为瞬时切削角度;φst, φex为铣刀切入、切出角度。
切向分力Ftj,为
Ftj(φj)=Ktcah(φj)+Ktea。
(6)
式中:a为轴向切削深度;Ktc、Kte为切削力、边缘力系数;h(φj)为切屑厚度变量。材料可从存储在数据库中的数据得到。切屑厚度变量可表达为
h(φj)=afsinφj。
(7)
其中af是每齿进给量。每齿切削周期内Tmaxc=max(Tc)。切削功率为

(8)
式中:V为切削速度,等于πDn;n为主轴转速。
步骤2:确定主轴电机参数。主轴电动机有关参数确定后才可以进行下一步的驱动形式选定。功率与转矩关系如图2所示。

图2 主轴电机功率转矩特性图
电动机功率Pmo与转矩Tmo关系为
(9)
式中:nmo是电机转速,r/min;nmax是图2中最大电机转速。
步骤3:分类。通过最大切削力矩Tmaxc和对应主轴转速n可以验证主轴电动机规格的合理性,如图2所示。通过选择条件1至5对驱动选择进行分类。其中:Gs、Gmo分别代表主轴、电动机上齿轮尺寸;Tac、nacmax分别为主轴实际转矩和主轴实际最大转速。
选择条件1:若Tmaxc>Tmo且n>nmax(Gs=Gmo),4种驱动形式皆不可行。
选择条件2:若Tmaxc>Tmo且/或n>nacmax(Gs≠Gmo),4种驱动形式皆不可行。
选择条件3:若Tmaxc≤Tmo且/或n≤nacmax(Gs≠Gmo)中,Tmaxc>1.5kW时,4种驱动形式皆不可行。
选择条件4:若Tmaxc≤Tmo且/或n≤nacmax(Gs≠Gmo)中,Tmaxc≤1.5kW时,既可带轮驱动又可进行齿轮驱动。
选择条件5:若Tmaxc≤Tmo且n≤nmax(Gs=Gmo),既可直接联接驱动又可采用电主轴驱动。
步骤4:应用模糊逻辑进一步确定驱动方式是带轮驱动或齿轮驱动,还是直接联接或电主轴。本文主要对带轮驱动、齿轮驱动选择进行讨论。
1.3 齿轮驱动或带轮驱动的选择
参照轴承手册等资料[9-12]得到转矩隶属函数、主轴转速隶属函数、成本/精度隶属函数以及齿轮/带轮隶属函数,应用这些隶属函数可以将给定条件模糊化,再分别应用模糊规则得到是齿轮驱动还是带轮驱动的选择结果,最后经过重心法归并得出模糊解。带轮传递的转矩相对于齿轮传递的转矩要小。
1)转矩隶属函数。其转矩集的隶属函数如图3所示。转矩用模糊术语“小”“中等”“大”等进行分类。

图3 转矩隶属函数
2)主轴转速隶属函数。图4是主轴转速的隶属函数。在高速转动时,离心力会阻碍传递大的力矩。通常当转速高于1.6 kr/min时,带轮驱动和齿轮驱动是不可行的,因此,当选择齿轮或带轮驱动时,使用“中速”和“低速”隶属函数。带轮驱动零件较简单,可以低成本制造出来。相反,齿轮驱动设计与制造的复杂程度较高,其花费更高。成本和高精度隶属函数如图5所示。设计者需要在1至10之间选择一个整数权重值。
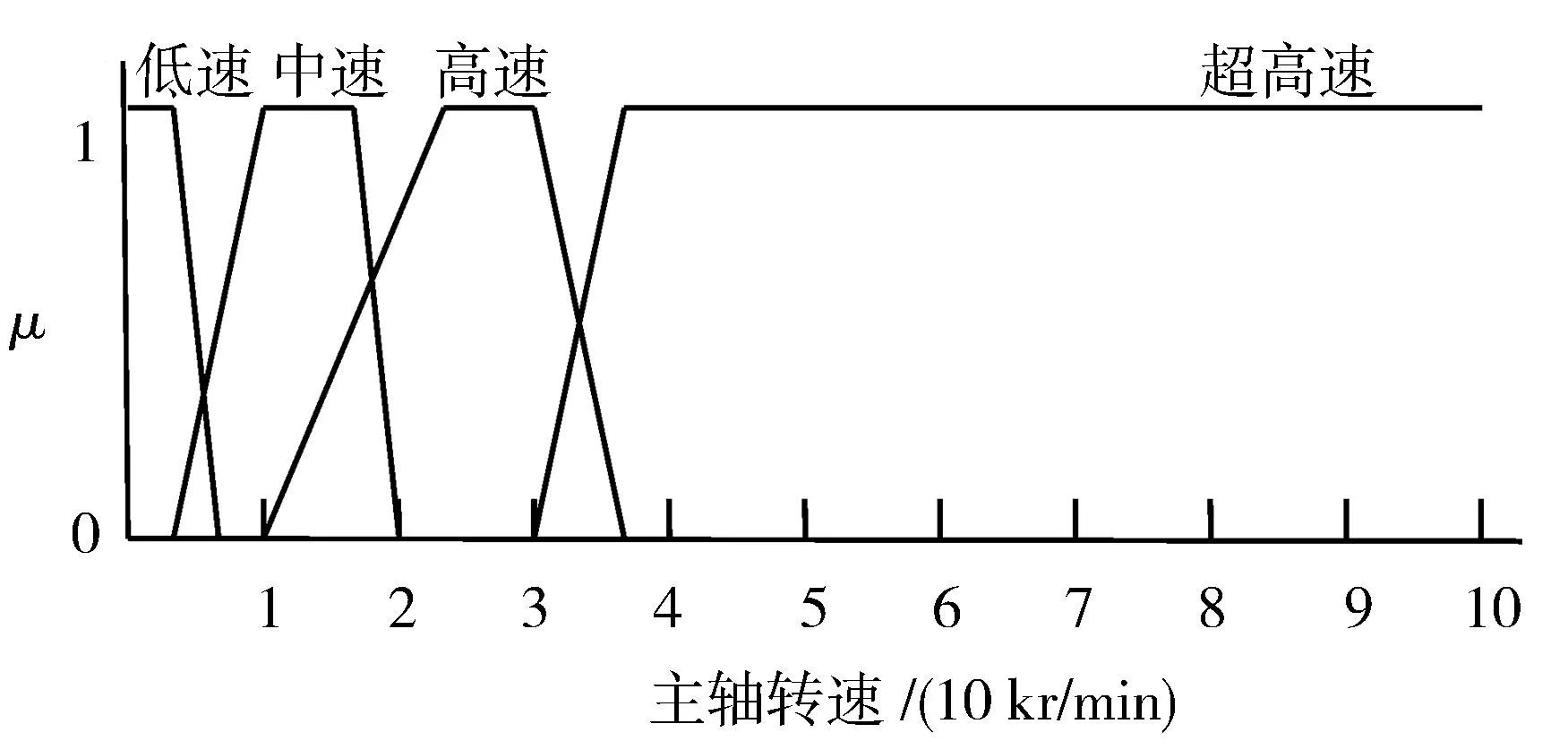
图4 主轴转速隶属函数

图5 成本—精度隶属函数
3)齿轮与带轮隶属函数。驱动类型也必须模糊化。齿轮和带轮的隶属函数如图6所示。这些隶属函数用于推断。
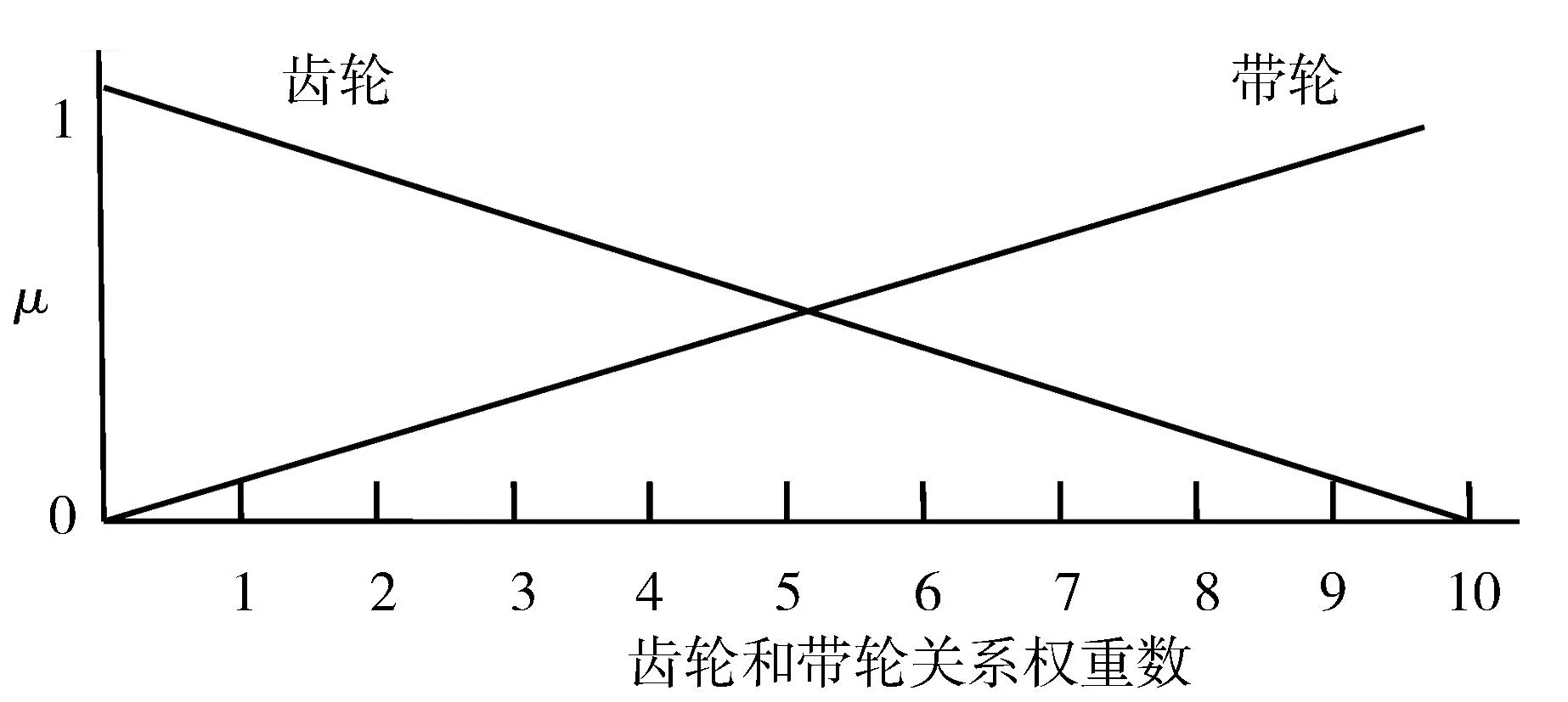
图6 齿轮/带轮隶属函数
通过隶属函数模糊化转矩、转速、成本/精度及齿轮/带轮驱动类型,建立了一系列模糊规则组。规则组1至规则组7是提供驱动形式选择的模糊规则(适用于选择齿轮或带轮)。这些规则由设计原理而来。这样可以通过给定切削力矩、最大主轴转速、成本/精度的权重值以及相应隶属函数决定是选择带轮驱动还是齿轮驱动。
规则组1:IF 转矩大且主轴转速低 THEN 齿轮驱动。
规则组2:IF 转矩小且主轴转速中等 THEN带轮驱动。
规则组3:IF 转矩中等且主轴转速中等THEN带轮驱动。
规则组4: IF 转矩小且主轴转速低且成本低 THEN带轮驱动。
规则组5: IF 转矩小且主轴转速低且精度高 THEN带轮驱动。
规则组6: IF 转矩中等且主轴转速低且成本低 THEN带轮驱动。
规则组7: IF 转矩中等且主轴转速低且精度高 THEN齿轮驱动。
2模型应用
下面以需用切削力矩、最大主轴转速和成本/精度权重值分别为185 N·m、6.2 kr/min、7为例,介绍应用上述模糊理论进行驱动选择的过程。注意:隶属函数中只有低速和中等速度的用于选择齿轮或带轮驱动;上述7个规则组都适用于这些隶属函数。

图7 规则组4的推理过程
通过规则4的推断,转矩、主轴转速和成本/精度分别被模糊化为0.13、0.66和0.3,如图7所示。由于使用最小算子进行推断,所以在齿轮/带轮模糊函数中使用最小模糊数值0.13。图8示出了整个推断过程,通过应用完7个规则后,可以获得图8右边的7个隶属函数,再将它们归并得到右下方的最终隶属函数图。从最终隶属函数计算出重心点,且它在横坐标轴上的值就是解模糊值。从图8可知,最终解模糊值为4.20,再按以下选择原则确定驱动类型:如果解模糊大于等于5,则驱动形式选择带轮驱动;如果解模糊小于5,则驱动形式选择齿轮驱动。由此规则,可以确定选择齿轮驱动。

图8 齿轮/带轮选择模糊逻辑推导过程
根据上述思路,某大型机床企业在高速机床数字化设计选择主轴过程时,在已知机床所需功率前提下,通过参数计算出主轴电动机转矩和最大主轴转速,根据成本/精度权重值以及相应隶属函数初选出驱动方式是齿轮/带轮,再由7个规则组归并出最终隶属函数图,利用重心法算出重心点,得出解的模糊值,将该值与齿轮/带轮隶属函数图对比,最终确定该主轴驱动方式是齿轮驱动。该设计过程符合智能化主轴设计平台建立的原则,经过企业实际应用验证,该方法设计、选择的驱动实际可行。
3结论
本文以加工中心主轴系统的共性为出发点,提出了一个主轴系统智能设计驱动方式选择规则库,该套规则的建立为机床功能模块设计提供了智能化设计方法,为进一步开展其他产品和关键零部件的智能设计提供了可行的技术方案。
参考文献
[1]国家自然科学基金委员会工程与材料科学部. 机械与制造科学[M]. 北京:科学出版社,2006:316.
[2]徐燕申,徐千理,侯亮. 基于CBR的机械产品模块化设计方法的研究[J]. 机械科学与技术, 2002,21(5):833.
[3]蔡自兴. 智能控制导论[M]. 北京:中国水利水电出版社,2007:93.
[4]Tsai Hung-Cheng,Hsiao Shih-Wen.Evaluation of Alternatives for Product Customization Using Fuzzy Logic[J].Inf Sci (Ny),2004,158(1/4):233.
[5]何新贵. 模糊知识处理的理论与技术[M].2版. 北京: 国防工业出版社,2004:82.
[6]SHAO X-Y,WANG Z-H,LI P-G,et al.Integrating Data Mining and Rough Set for Customer Group-based Discovery of Product Configuration Rules[J].International Journal of Production Research,2006,44(14):2789.
[7]ZHA X F,SRIRAM R D,LU W F.Evaluation and Selection in Product Design for Mass Customization: a Knowledge Decision Support Approach[J].Artificial Intelligence for Engineering Design, Analysis and Manufacturing: AIEDAM,2004,18(1):87.
[8]ALTINTAS Y,BER A A. Manufacturing Automation: Metal Cutting Mechanics, Machine Tool Vibrations, and CNC Design[M]. Cambridge :Cambridge University Press,2001:54.
[9]Fukuda Corp. FAG Ultra High Speed and Super Precision Spindle Bearings[EB/OL].[2014-03-12].http://www.docin.com/p-1231420078.html.
[10]Osamu Maeda. Expert Spindle Design System[J]. International Journal of Machine Tools and Manufacture, 2005, 45(4/5): 537.
[11]NSK Ltd. Precision Rolling Bearings for Machine Tool Spindles[EB/OL].[2014-03-12].http://www.docin.com/p-189056950.html.
[12]NSK-RHP. RHP Super Precision Bearings[EB/OL].[2014-03-12]. http://www.docin.com/p-189056950.html.
(编校:饶莉)
The Drive Tactics of Spindle System of Machine Tool Based on Fuzzy Rules
YIN Yang1,WANG Yu1, LAI Xiao2
(1.SchoolofMechanicalEngineering,XihuaUniversity,Chengdu610039China;
2.YibinVocationalandTechnicalCollege,Yibin644003China)
Abstract:Under the premise of using the experience and knowledge, a select method of drive mode of spindle system based on fuzzy design rules is proposed. It involves applying fuzzy theory according to main steps of drive mode selection of machine tools. Integrated drive strategy to the spindle system of intelligent design, better results is achieved through practical application in a large machine tools manufacture, the feasibility and practicability of proposed system principles and implementation techniques is indicated, and the better design quality and higher efficiency is showed.
Keywords:intelligent design; Fuzzy decision; membership function
doi:10.3969/j.issn.1673-159X.2016.01.004
中图分类号:TG502;TG659
文献标志码:A
文章编号:1673-159X(2016)01-0019-05
基金项目:国家自然科学基金项目(51305357);四川省教育厅科研项目(13ZB0018);西华大学重点科研项目( Z1220218)。
收稿日期:2014-05-09
第一作者:尹洋(1971—),女,教授,博士,主要研究方向为计算机辅助设计与分析CAD/CAM/CAE及先进制造技术。E-mail:yinyang@mail.xhu.edu.cn
·机电工程·
