
自抗扰控制器在车载发电控制系统中的应用
2016-03-16 04:27陈路明廖自力刘春光
装甲兵工程学院学报 2016年5期
陈路明, 廖自力, 刘春光, 项 宇
(装甲兵工程学院控制工程系, 北京 100072)
自抗扰控制器在车载发电控制系统中的应用
陈路明, 廖自力, 刘春光, 项 宇
(装甲兵工程学院控制工程系, 北京 100072)
为抑制车载发电控制系统在发电过程中的转速波动、负载变化及参数时变等扰动,提高稳压输出精度,将自抗扰控制器应用到车载发电控制系统,对系统施加干扰条件并进行仿真。与传统PID控制器的仿真对比结果表明:应用自抗扰控制器的车载发电控制系统能够有效补偿外界扰动,具有很高的稳压输出性能。
自抗扰控制器;PID控制器;永磁同步电机;稳压发电
随着车辆电气化程度的不断提高,车载用电设备对电力系统供电能力和品质提出了更高的要求。大力发展电传动车辆成为应对电气化挑战的有效手段[1],车载发电控制系统则是电传动车辆电力系统的核心单元。车载发电控制系统通过控制电机在发动机拖动下发电,实现机电能量的转化,同时尽量保证系统输出电压的相对稳定,为用电设备源源不断地提供高品质电能,保证用电设备工作精度和使用寿命[2]。但车辆工作环境比较复杂,存在较多不确定性扰动因素,如发动机转矩脉振、负载突加突卸以及转速跳变等,会对输出电压稳定性产生不利影响,限制其在大功率电传动系统中的应用。
为解决这个问题,研究者进行了大量研究工作,提出了多种不同的扰动抑制方法,其中:林楠等[3]针对高速永磁同步电机在负载或转速变化时难以稳定输出电压的问题,提出了一种混合励磁的发电机结构方案,并通过一台10 kW混合励磁原理样机进行了试验;程木军等[4]针对船舶发电机在大负荷突变时的端电压稳定问题,提出了一种基于神经网络的PID控制系统,实现了参数的动态调节。但受当前电机制造水平等因素限制,电机固有结构已接近改变极限,改进空间不大;而PID控制系统虽然能够有效处理线性控制系统,但面对非线性系统高质量稳压控制的要求有很大局限性,迫切需要提出高效的扰动抑制方法,以提高发电机稳压输出性能。
自抗扰控制器(Auto Disturbance Rejection Controller, ADRC)是一种非线性控制器,其继承了传统PID控制器对模型精度要求不高、能够有效补偿模型扰动等优点,并与现代控制理论成果紧密结合,在控制对象参数发生变化或存在扰动时具有良好的控制效果,能够有效提高控制系统的稳压输出特性[5-7]。笔者以某型电传动装甲车辆发电控制系统为研究对象,采用自抗扰控制器改进车载发电控制系统,以提高扰动条件下的稳压输出特性。
1 车载发电控制系统特性分析
1.1 系统结构
车载发电控制系统由柴油发动机、永磁同步电机、控制器、整流功率变换器、转子位置检测器和储能元件(主要为动力电池和超级电容复合电源)等组成[8],系统结构如图1所示。

图1 车载发电控制系统结构
控制器接收来自永磁同步电机、动力电池、超级电容和发动机等部件的多路检测信号,根据驾驶意图进行数据处理,输出控制信号到功率变换器以控制电机工作状态;功率变换器接收来自控制器的控制信号,实现三相交流电到直流电的整流变换以及直流电到三相交流电的逆变换;转子位置和转速信号通过内置式旋转变压器进行检测,并将结果反馈给控制器;储能元件由动力电池和超级电容构成,能够满足负载在能量和功率2方面的需求。
1.2 电机数学模型
永磁同步电机是发电过程的主要执行单元,为简化电机模型和便于理论分析,作以下假设: 1)忽略电机铁芯饱和及磁滞损耗; 2)忽略转子和永磁体阻尼作用; 3)转子气隙磁场在气隙空间分布为正弦波; 4)电机三相绕组中感应电动势为正弦波且对称。
永磁同步电机通常采用d-q坐标系下的数学模型,从电压、磁链、转矩和运动方程4个方面描述内部和外部工作特性[9],表达式分别如下:
定子电压方程为

(1)
定子磁链方程为

(2)
电磁转矩方程为

(3)
机械运动方程为
(4)

在车载发电控制系统中,永磁同步电机的主要参数如表1所示。
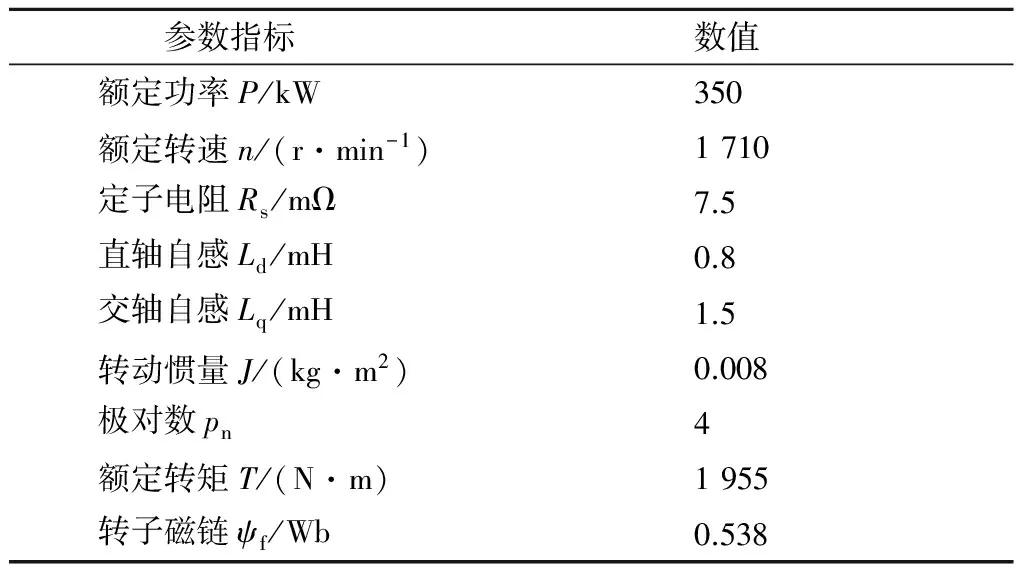
表1 永磁同步电机主要参数
1.3 发电控制策略
为满足系统高效发电的要求,车载发电控制系统通常采用矢量控制来实现定子电流的解耦控制。
从结构上来看,电机输出电压作为被控制量,给定电压与反馈电压的差值作为PID调节量,作用于控制对象。基于PID控制器的车载发电控制系统原理如图2所示。电压调节器中的PID结构如图3所示。

图2 基于PID控制器的车载发电控制系统原理

图3 电压调节器中的PID结构
在发电阶段,电机运行于高速恒功率区域,通常采取弱磁控制来维持输出电压的平衡,此时受逆变器容量以及电机电压额定值限制,电机能输出的最大相电流矢量幅值ismax和最大相电压矢量幅值usmax满足如下约束关系[10]:

(5)

(6)
由式(5)可知:电流约束条件在iq-id平面上形成一个圆,其表达式为

(7)
由式(6)可知:电压约束条件在iq-id平面上形成一个椭圆,其表达式为

(8)
2 自抗扰控制器设计
2.1 自抗扰控制器结构
自抗扰控制器主要包括3个方面[11]:跟踪微分器(Tracking Differentiator,TD)、扩张状态观测器(Extended State Observer,ESO)和非线性状态误差反馈控制律(Nonlinear State Error Feedback,NLSEF)。设受到未知扰动作用的非线性不确定对象为

(9)
式(9)对应的自抗扰控制器结构如图4所示。其中:TD主要用于快速无超调地跟踪系统给定输入,并安排合理的过渡过程,得到给定输入的各阶微分信号;ESO是自抗扰控制器的核心控制部分,主要用于观测系统及其各阶导数的输出,还需要对系统总扰动进行观测预估;NLSEF主要用于对系统的广义误差信号以及ESO预估出的扰动进行非线性组合,从而能够使其得到相应的补偿。

图4 自抗扰控制器结构
2.2 自抗扰控制器数学模型

TD数学模型为

(10)
ESO数学模型为
(11)
NLSEF数学模型为
(12)
式中:v1为输入信号的跟踪值;v为输入信号的给定值;r为速度因子,其决定跟踪的速度;h为滤波因子,其对噪声起滤波作用;e为系统输出量观测值与输出值之间差值;z1、z2分别为系统输出量观测值及其微分估计值;β1、β2、β为表达式的可调参数,需要被整定;α1、α2、α为滤波因子;δ为线性区间的宽度;e1为输入信号的跟踪值与输出值之间差值;u0为非线性组合输出的控制量;fal(·)为非线性滤波函数,其表达式为

(13)
该控制器内部包含较多参数,应用前需要根据系统控制要求和已知的被控对象特点等进行参数整定,得到适应被控对象的自抗扰控制器模型。
2.3 自抗扰控制器仿真模型
传统车载发电控制系统具有双闭环控制结构,控制效果主要依赖外环的电压调节器,因此将其作为主要研究变量,用自抗扰控制器替换基于PID的电压调节器,得到改进后的车载发电控制系统,其原理如图5所示。

图5 基于自抗扰控制器的车载发电控制系统原理
据此,在MATLAB/Simulink中建立基于自抗扰控制器的车载发电控制系统仿真模型[13],其结构如图6所示。

图6 基于自抗扰控制器的车载发电控制系统仿真模型
3 仿真实验结果
传统车载发电系统的PID控制参数包括比例系数、积分系数和微分系数,通过工程整定法得到最优参数组合:若比例系数P设置过大,则容易导致响应超调,反之则会降低稳态误差精度,因此设定P=10;若积分系数I取值过小,则容易导致系统不稳,反之则会降低响应速度,因此设定I=150;微分系数D取值越大,微分作用越强,但在误差快速变化时,响应曲线容易产生“毛刺”,因此设定D=0.8。由此得到PID控制器的实际应用模型。
自抗扰控制器模型包含较多参数,通常按以下规则进行整定:TD中速度因子r初始设计尽量大些,因此设定r=100,考虑滤波效果及安排过渡过程,设定滤波因子h=0.1;ESO中fal(·)中的参数,取α1=0.5,α2=0.25,δ=0.05,控制量扰动补偿参数b=1.5pnψf(JLq)-1作为参考值进行设置,参数β1=120,β2=2 500;NLSEF中取α=0.1,β=80。由此得到自抗扰控制器的实际应用模型。
为验证自抗扰控制器在车载发电控制系统中的作用效果,需要考虑系统在外部扰动下主要参数指标的变化情况,本文以发动机转速突变作为扰动控制量,对比研究自抗扰控制器和传统PID控制器对转速扰动的应对效果,仿真结果如图7所示。从图7(a)、(b)可以看出:车载发电控制系统从开始工作到进入稳压状态,应用不同的控制器得到的结果存在差异,在初始时刻,传统PID控制器电压上升较快,但存在一定超调,0.6 s左右输出电压能够达到 750 V稳定电压输出状态,自抗扰控制器电压上升相对较慢,但不存在超调,0.3 s左右即达到稳定状态;在1.5 s时刻,转速由1 900 r/min突降到1 400 r/min,传统PID控制器电压先降后升,经过0.4 s左右重新达到稳定状态,自抗扰控制器先降后缓升,经过0.2 s左右即达到先前的稳定状态;在3 s时刻,转速由1 400 r/min突升到1 900 r/min,传统PID控制器电压先升后降,经过0.5 s左右重新达到稳定状态,自抗扰控制器先升后缓降,经过0.2 s左右即达到先前的稳定状态。由此可见:在电压控制方面,自抗扰控制器能够有效解决快速性和超调性之间的矛盾,在避免超调的情况下快速稳定输出电压。
由图7(c)可见:车载发电控制系统应用自抗扰控制器后,转矩波动幅值明显小于传统PID控制器,在扰动跟随时,能够以较小的转矩波动代价快速抑制扰动影响。由图7(d)可见:自抗扰控制器电流波动幅值和频率均小于传统PID控制器。整体而言,在车载发电控制系统方面,自抗扰控制器比传统PID控制器具有更好的控制效果,能够有效抑制各种外部扰动,实现高质量的稳压发电过程。
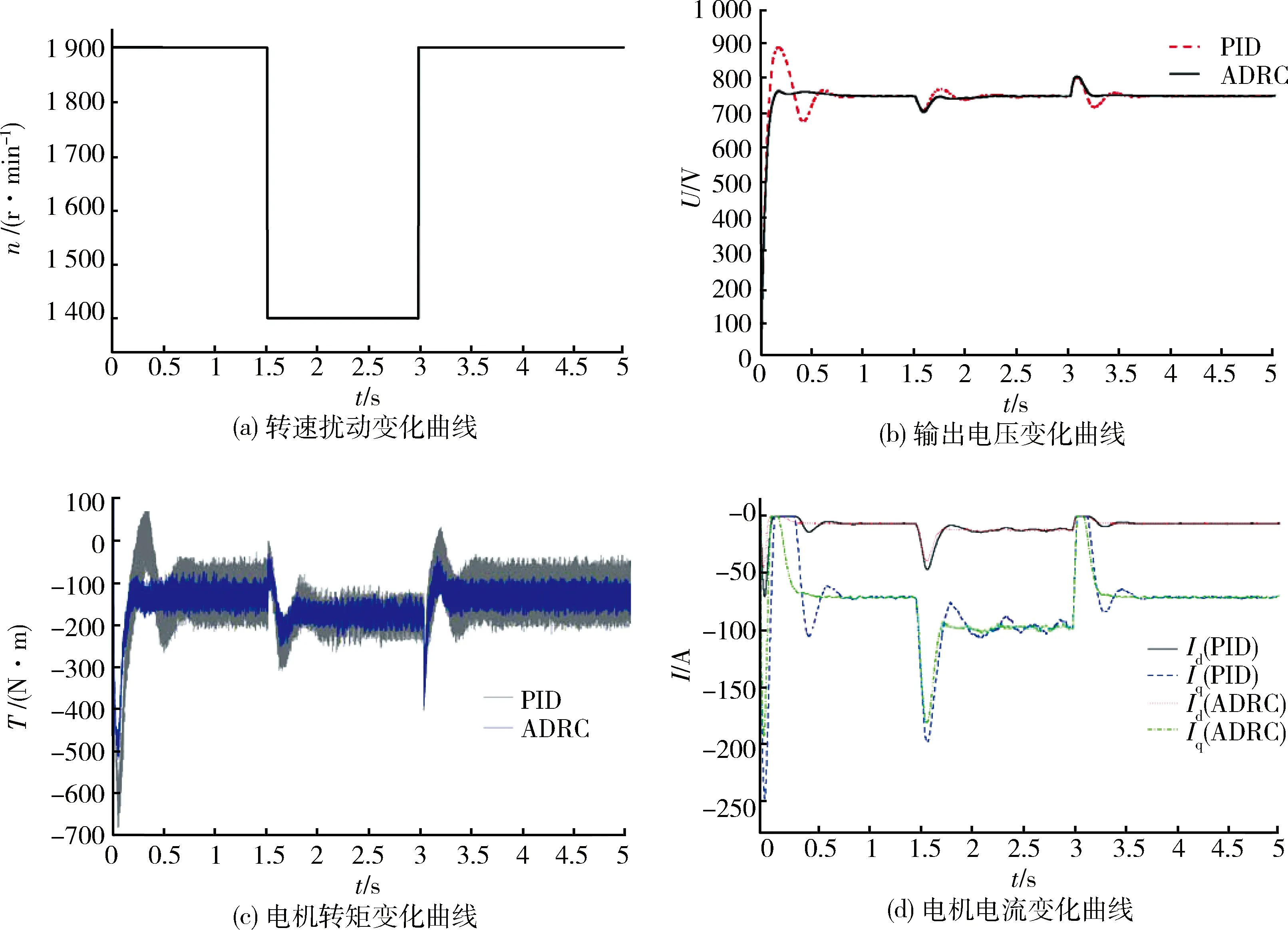
图7 转速扰动下不同控制器效果对比分析
4 结论
笔者针对某型车载发电控制系统,搭建了基于MATLAB/Simulink的系统仿真模型,设计了自抗扰控制器,通过仿真实验研究了外加扰动下的输出电压变化情况,并与传统PID控制器的仿真结果进行了对比,验证了所设计的自抗扰控制器的有效性。然而,本文主要从外部扰动的角度研究了自抗扰控制器的作用效果,尚未将系统内部的扰动因素考虑到控制器设计过程中,下一步将更加全面地评估系统内外扰动因素,优化自抗扰控制器结构和参数,以提升车载发电控制系统的稳压输出特性。
[1] 廖自力, 马晓军, 臧克茂, 等. 全电战斗车辆发展概况及关键技术[J]. 火力与指挥控制, 2008, 33(5): 1-4.
[2] 张希, 米春亭. 车辆能量管理: 建模、控制与优化[M]. 北京: 机械工业出版社, 2013: 127-138.
[3] 林楠, 王东, 魏锟, 等. 高速混合励磁发电机的结构及调压性能[J]. 电工技术学报, 2016, 31(7): 19-25.
[4] 程木军, 孙才勤. 智能PID控制器在船舶发电机电压控制中的应用[J]. 大连海事大学学报, 2006, 32(2): 5-8.
[5] 卢达. 永磁同步电机调速系统控制策略研究[D]. 杭州: 浙江大学, 2013.
[6] 邱晓波, 窦丽华, 韩京清, 等. 自抗扰控制在坦克激动目标状态估计中的应用[J]. 兵工学报, 2009, 30(7): 989-993.
[7] Xia Y Q, Fu M Y. Overview of ADRC[J]. Lecture Notes in Control and Information Sciences, 2013, 438(1): 49-54.
[8] 毛明, 韩政达, 刘翼. 论全电车辆的能量管理和功率管理[C]∥第三届特种车辆全电化技术发展论坛组织委员会. 第三届特种车辆全电化技术发展论坛论文集. 北京: 国防工业出版社, 2014: 162-168.
[9] 刘伟, 殷国栋. 混合动力汽车系统建模与控制[M]. 北京: 机械工业出版社, 2014: 28-31.
[10] 唐任远. 现代永磁电机理论与设计[M]. 北京: 机械工业出版社, 2010: 252-262.
[11] 郑颖, 马大为, 姚建勇, 等. 基于自抗扰技术的火箭炮伺服系统解耦控制[J]. 火炮发射与控制学报, 2014, 35(4): 6-10.
[12] 苏位峰. 异步电机自抗扰矢量控制调速系统[D]. 北京: 清华大学, 2004.
[13] 王正林, 王胜开, 陈国顺, 等. MATLAB/Simulink与控制系统仿真[M]. 北京: 电子工业出版社, 2012: 44-64.
(责任编辑: 尚彩娟)
Application of Auto Disturbance Rejection Controller in Vehicle Power Generation Control System
CHEN Lu-ming, LIAO Zi-li, LIU Chun-guang, XIANG Yu
(Department of Control Engineering, Academy of Armored Force Engineering, Beijing 100072, China)
To reject speed variations, load changes, time-varying parameters and many other perturbations during the power generation process of vehicle power generation control system, an Auto Disturbance Rejection Controller (ADRC) is introduced into vehicle power generation control system to improve the accuracy of stable power generation. Under interference circumstances, the ADRC simulation results are compared with that of traditional PID controller. The results show that vehicle power generation control system with ADRC has a good performance in compensating external disturbance and stabilizing output voltage.
Auto Disturbance Rejection Controller (ADRC); PID controller; permanent magnet synchronous motor; stable power generation
1672-1497(2016)05-0064-05
2016-07-31
军队科研计划项目
陈路明(1991-),男,硕士研究生。
TP214;TM313
A
10.3969/j.issn.1672-1497.2016.05.013
猜你喜欢
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2021年5期)2021-11-04
防爆电机(2021年3期)2021-07-21
防爆电机(2021年2期)2021-06-09
石油和化工设备(2020年11期)2020-01-01
电子制作(2016年21期)2016-05-17
安徽化工(2015年4期)2015-12-12
