
机载双轴旋转调制激光惯导系统误差特性及关键技术分析
2016-03-16 06:36雷宏杰王晓斌
导航定位与授时 2016年4期
雷宏杰,王晓斌,刘 放
(中航工业飞行自动控制研究所,西安 710065)
机载双轴旋转调制激光惯导系统误差特性及关键技术分析
雷宏杰,王晓斌,刘 放
(中航工业飞行自动控制研究所,西安 710065)
在未来作战环境下,长航时远程作战飞机对全自主长航时高精度导航系统提出了迫切的需求,对提高作战能力起着重要作用。对比各种导航手段,其中双轴旋转调制激光惯导系统是目前唯一一种可行的全天候全自主高精度导航手段,从双轴旋转调制惯导系统的原理出发,对双轴旋转调制激光惯导系统机载应用的误差特性及关键技术进行深入分析,结果表明:对于1n mile/12h的导航精度,双轴旋转调制惯导系统较捷联惯导系统对陀螺漂移精度要求降低一个数量级,关键技术实现方案合理可行。
激光惯导系统;双轴旋转调制;误差特性;关键技术;机载
0 引言
在未来作战环境下,长航时远程作战飞机对全自主长航时高精度导航系统提出了迫切的需求,作为远程作战飞机任务及火控系统的核心信息源,在复杂电磁环境下为其提供长航时飞行或武器发射所需的全自主、高精度导航信息,对提高长航时远程作战飞机准确到达、精确打击和有效侦察等作战能力起着重要作用。
目前全自主导航手段有惯性导航系统、惯性/天文组合导航系统、惯性/景象或地形匹配组合导航系统。其中惯性导航系统具有全天候、全自主导航的优点,也是其他导航手段无法比拟的;但惯性导航系统的最大缺点是因惯性器件误差而导致的误差随时间积累特性,即导航精度随时间下降。要在短时间内提高惯性器件精度受工艺水平及成本的限制,而且精度提高是有限的,仍然无法满足长航时远程作战飞机的使用需求。目前,国内外采用旋转调制技术可以自动抵消惯性器件常值误差,是一种有效提高惯导系统长航时导航精度的手段[1]。
惯性/天文组合导航系统也是一种自主导航手段,可达到较高的导航精度,但天文导航受天气情况影响较大,并不能称作是一种全天侯的自主导航手段。
惯性/景象或地形匹配组合导航系统虽然在某些情况下也可达到较高的自主导航精度,但受地形数据库的限制,只能在部分区域达到较高精度,所以也无法满足远程作战飞机高精度导航需求。
另外,对于卫星导航、多普勒雷达等导航方式,虽然可以达到较高的导航精度,但是在战场环境下易受干扰和欺骗,不属于全自主导航手段。
综上,基于现阶段惯性器件技术发展水平,旋转调制惯性导航系统是唯一一种可行的全自主全天候高精度导航手段,近几年在国内外研究较多,本文将从旋转调制惯导系统的原理出发,对其机载应用的关键技术及误差特性进行深入分析。
1 机载旋转调制惯导系统简介
旋转调制惯导系统按旋转轴来分,有双轴旋转调制、单轴旋转调制及三轴旋转调制,其中单轴旋转调制系统只能调制两个陀螺误差,所以精度提高有限。而三轴旋转调制系统,相比双轴旋转调制系统理论极限精度相当,但系统复杂程度、体积、重量、成本提高,可靠性相对降低,综合考虑长航时远程飞机机动特点,双轴旋转调制系统更适宜,所以本文主要讨论双轴旋转调制激光惯导系统[1]。
图1所示为双轴旋转调制式激光惯导结构示意图,惯性测量单元(IMU)固定于双轴旋转机构上,其中内框与IMU的方位轴一致,外框与IMU的横滚轴一致。实际工作过程中,IMU通过双轴转位机构分别绕其方位轴和横滚轴进行180°的定期定序转位运动[2-3]。
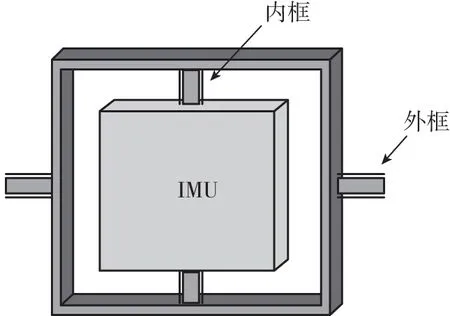
图1 双轴旋转调制式惯导结构示意图Fig.1 Structure diagram of double-axis rotation-modulating INS

图2 系统解算框图Fig.2 Calculation diagram of the system
根据惯导系统模型,陀螺和加速度计的输出可表示为:
(1)

(2)

将式(1)和式(2)分别展开并忽略二次项,得到陀螺和加速度计的输出误差为:
(3)

(4)
经过旋转变换后,双轴旋转调制式激光惯导系统与常规捷联惯导系统的误差传播方程一致,可用如下公式表示:
(5)

(6)

2 系统误差特性分析及误差分配
2.1 机载捷联惯导误差特性
双轴旋转调制惯导系统的实质还是捷联惯导系统,为了比较两者的误差特性,首先对捷联惯导系统的误差特性进行了分析及误差分配。由捷联惯导误差方程可知,造成位置误差发散的只有北向陀螺漂移和天向陀螺漂移,其他因素造成的误差长期来看都是振荡的。以下在1nmile/12h的系统精度前提下,通过误差分析,给出陀螺漂移、加计零偏和初始对准偏角应满足的精度要求。
1) 陀螺漂移
在长时间导航中,若只考虑地球振荡周期,则位置误差与地理系下等效陀螺漂移的关系为[6]:
(7)
由式(7)可以看出,最终引起位置误差发散的仅有北向和天向陀螺漂移,二者的综合作用为εp(εp=εncosφ+εusinφ),实质上代表的是地球极轴方向的漂移。对于1nmile/12h的系统精度要求,由式(7)可得εP=0.0014(°)/h。为了保证εP<0.0014(°)/h,通常εn和εu均应小于0.001(°)/h。
在捷联惯导系统中,机体系X、Y、Z轴的陀螺漂移对于εn和εu都有贡献,为了保证εn和εu都小于0.001(°)/h,则εX、εY应小于0.0007(°)/h,εZ应小于0.001(°)/h。
2)加计零偏
加计零偏不会引起位置误差的发散,但会引起位置误差振荡,其误差传播方程可简化为:
(8)
(9)
若要满足1nmile/12h的系统精度要求,对于加计零偏来讲,也即要求其造成的位置误差振荡的最大值小于1nmile。另外载体静止时,加计零偏和水平平台偏角构成平衡,而在载体机动时,上述平衡被破坏。特别是当载体航向变化180°时,由此造成的影响最大。这种情况下,由式(8)和式(9)可得▽n和▽e应小于7×10-5g和6×10-5g(取纬度φ=34°)方能满足系统精度要求。同陀螺漂移的分析一样,机体系下的加计零偏▽X、▽Y和▽Z均应小于4×10-5g。
3)初始偏角
初始偏角造成的位置误差也是振荡性质的,水平偏角主要引起舒拉振荡,而方位误差主要引起的是地球周期振荡,其误差传播形式为:
(10)
(11)
(12)
单独考虑某一项误差,若要满足1nmile/12h系统精度要求,则水平偏角φE0和φN0应小于10″,方位偏角φU0应小于30″。
以上分析都是基于单项误差,实际系统中上述误差对系统精度都有影响,综合考虑各项误差,作如表1所示误差分配。

表1 长航时惯导系统误差分配
2.2 机载双轴旋转调制激光惯导系统误差特性
1) 误差特性分析
由上述误差仿真结果可以看出,要想实现1n mile/12h的系统精度,陀螺精度要优于0.0007(°)/h,加计零位要优于20μg,同时对初始对准精度也有较高的要求,但目前国内的惯性器件水平难以满足要求,在此情况下,采用双轴旋转调制技术不失为一种有效的系统解决方案,在惯性器件水平不变的前提下,可通过IMU的双轴旋转调制有效提高系统自主导航精度[8]。如下对机载双轴旋转调制激光惯导系统误差特性进行分析并对其误差项进行分配。
通过IMU双轴旋转调制,惯导系统误差项可分为两类:一为可自动抵消的误差项,二为不可自动抵消的误差项。其中可自动抵消的误差项中,部分误差项虽然不会引起发散性误差,但会引起锯齿性误差,需要加以控制。各误差项统计如表2所示,可自动抵消的误差项包括:陀螺常值、陀螺安装偏角误差、陀螺标度因子误差(双轴旋转引起的部分)、加计常值、加计安装偏角误差;不可自动抵消的误差项包括:惯性器件随机误差(主要为陀螺随机游走误差)、陀螺标度因子误差(地球自转引起的部分)、系统初始对准误差、加计标度因子误差、惯性器件磁致误差。

表2 双轴旋转调制激光惯导系统误差项

(13)
2.3 仿真结果



图3 双轴旋转调制惯导系统误差仿真结果Fig.3 Error characteristic simulation of double-axis rotation-modulating INS
3 机载双轴旋转调制激光惯导系统关键技术分析
3.1 双轴转位策略设计及优化
双轴转位策略设计及优化是首先需要解决的关键技术问题,只有通过合理的IMU转位顺序编排与控制,才能使各误差项最大程度的自动抵消,而且可以将IMU双轴旋转激发出惯性器件安装偏角、刻度系数等误差项的影响降到最低;反之,如果双轴旋转方案设计不合理,将产生较大的速度、姿态锯齿振荡误差,甚至会出现较大的调制剩余误差,严重影响导航精度提升。
双轴转位策略设计及优化要根据各误差项的大小进行适应性的调整,没有一种双轴旋转策略针对所有情况都是最优的,而是针对特定误差项情况是相对最优的,所以双轴旋转策略设计的前提是明确惯性器件误差项特性,从而有针对性的进行设计。
针对表2中各误差项进行仿真及试验验证,本文设计了一种相对最优的16位置双轴转位策略(见表3),可使各误差项最大程度的自动抵消,而且可以将IMU双轴旋转激发出惯性器件安装偏角、刻度系数等误差项降到最低。由于篇幅所限,双轴转位策略设计过程不再详述。

表3 16位置旋转方案
3.2 载体角运动隔离
双轴旋转调制技术是基于IMU在地理系转位的平稳性、对称性来实现惯性器件常值误差的自动抵消,由式(5)、式(6)可知,载体角运动势必会影响IMU相对于地理系转位的对称性,甚至破坏预期的转位编排,从而影响惯性器件常值误差的自动抵消效率。针对长航时远程飞机飞行基本剖面,对双轴转位策略影响最大的是飞机的航向转弯运动。要减小载体角运动影响,就必须利用系统自身双轴旋转框架对载体角运动进行隔离,即双轴旋转机构不仅要执行预期的双轴转位顺序,而且还要隔离载体角运动[10]。
系统采取双轴旋转结构,要完全隔离IMU敏感到的载体相对于地理系的角运动显然是不可能的,但是考虑到长航时远程飞机运动特点,可采取方位完全隔离、水平部分隔离的方案[11]。本文提出的载体角运动双轴隔离方案示意图如图4所示,其中ωR为指令角速度,ωs、ωb分别为IMU敏感到的敏感轴向和机体系角速度,经过车载动态验证,此方案可最大程度地隔离载体的角运动,使IMU尽可能地按照设定转位顺序相对于地理系进行有序的转位,有效保证系统动态导航精度。

图4 载体角运动隔离示意图Fig.4 Carrier angular motion isolation scheme
3.3 高精度快速抗扰动初始对准技术
现代战争对飞机的快速反应特性及武器系统的高精度打击能力等提出了更高的要求,尤其提出了惯导系统必须缩短地面对准时间,并且同时可进行发动机开车、飞控自检、挂弹加油等全新作战操作模式。对此,必须对晃动基座条件下如何实现双轴旋转调制惯导系统快速精确对准方案进行设计。
双轴旋转调制惯导系统较捷联惯导系统而言,在对准过程中IMU可进行双轴转位,从而可大幅度提高各误差项的可观测性[6,8],不存在东向陀螺漂移与航向偏角“相抵”、水平加计零位与姿态偏角“相抵”的对准极限精度情况,从而通过基于双轴旋转及卡尔曼滤波器的初始对准,可实现高精度快速对准,如下针对表2误差项进行仿真,从误差收敛曲线可知,姿态对准精度优于2″,航向对准优于30″。对于抗扰动对准,需针对针实际环境调整滤波参数并设计相应的门限,在此就不再详述。

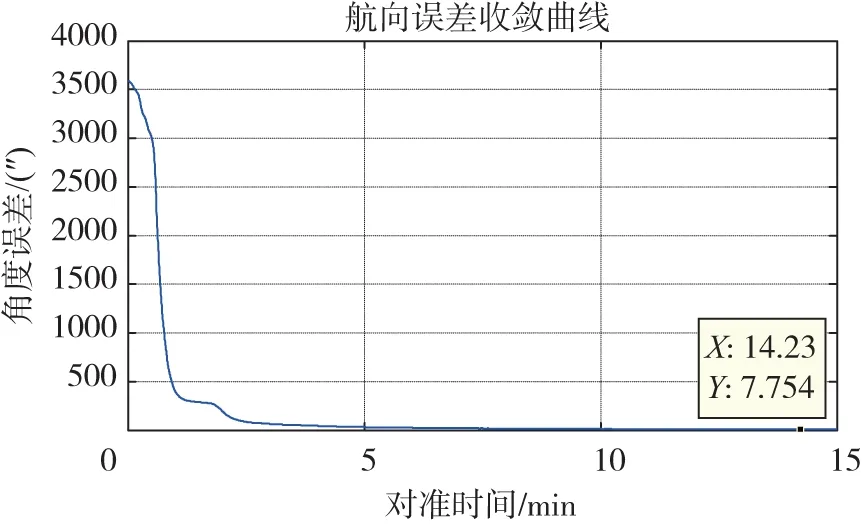
图5 旋转对准过程姿态航向误差收敛曲线Fig.5 Convergence plots of attitude and heading estimation during the rotation alignment
4 结论
综合上述分析,本文论述总结如下:
1)要满足1nmile/12h的机载长航时导航性能,双轴旋转调制激光惯导系统较捷联惯导系统对陀螺漂移精度要求降低一个数量级,实现途径合理可行,是解决机载长航时高精度全自主导航的一种重要技术途径;
2)针对1nmile/12h的导航精度,对双轴旋转调制惯导系统误差项进行了分配,并对各误差项引起的导航误差形式进行了定性定量的分析;
3)分析了双轴旋转调制激光惯导系统关键技术,并提出了相应解决措施。
[1] 陆志东,王晓斌.系统级双轴旋转调制捷联惯导误差分析及标校[J].中国惯性技术学报,2010, 18 (2):135-141.
[2]HibbardR,WylieB,LevisonE.SperryMarineMK-49,theworld’sbestringlasergyroship’sinertialnavigationsystem[J].JSDEProceedings,Orlando,FL,November,1996.
[3]TuckerT,LevisonE.TheAN/WSN-7Bmarinegyrocompassnavigator[C]//IONNTM2000.Anaheim,CA, 26-28January, 2000:348-357.
[4] 袁保伦,饶谷音.光学陀螺旋转惯导系统原理探讨[J].国防科技大学学报,2006, 28 (6):76-80.
[5]IshibashiS,TsukiokaS,YoshidaH.Accuracyimprovementofaninertialnavigationsystembroughtaboutbytherotationalmotion[C].OCEANS2007-Europe,2007.
[6] 于飞,孙骞,张亚,等.双轴旋转式惯导系统自标定技术[J].哈尔滨工业大学学报,2015,47(1):118-123.
[7] 秦永元.惯性导航[M].北京:科学出版社, 2006:69-72.
[8]SunFeng,SunWei,WuLin.CoarsealignmentbasedonIMUrotationalmotionforsurfaceship[C].IEEEPositionLocationandNavigationSymposiumPositionLocationandNavigationSymposium,2010.
[9]ChangGuobin,XuJiangning,LiAn,etal.ErrorAnalysisandSimulationoftheDual-AxisRotation-DwellAuto-CompensatingStrapdownInertialNavigationSystem[C].InternationalConferenceonMeasuringTechnologyandMechatronicsAutomation,2010.
[10] 张伦东,练军想,胡小平.载体角运动对旋转式惯导系统旋转调制效果的影响[J].国防科技大学学报,2011,33(4):152-156.
[11] 常国宾,许江宁,李安,等.载体运动对双轴连续旋转调制式惯导方案误差的影响[J].中国惯性技术学报,2011,19(2):175-179.
Analysis on Error Characteristics and Key Technology of Airborne Double-Axis Rotation-Modulating RLG INS
LEI Hong-jie, WANG Xiao-bin, LIU Fang
(Flight Automatic Control Research Institute FACRI Xi’an, Xi’an 710065, China)
In the coming combat circumstance, the long-range combat aircraft puts forward urgent requirement to full-autonomous, long-duration and high-accuracy navigation system, which plays an important role in improving the combat capability.Through contrast and analysis, the double-axis rotation-modulating RLG INS is the only all weather, full-autonomous and high-accuracy navigation system at present.The paper proceeds from the principle of double-axis rotation-modulating INS, then, analyses in depth the error characteristics and key technology of airborne double-axis rotation-modulating RLG INS.The results show that, for navigation accuracy achievement of 1.0n mile per 12hours, the accuracy requirements to RLG drift are deceased one order of magnitudes by using double-axis rotation-modulating RLG INS comparing with strapdown INS.Furthermore, the implementation scheme of the key technology is reasonable.
RLG INS;Double-axis rotation-modulating;Error characteristics;Key technology;Airborne
10.19306/j.cnki.2095-8110.2016.04.003
2016-04-05;
2016-05-15。
雷宏杰(1970-),男,研究员,主要从事惯性技术工程应用的研究。E-mail:618gdb104@facri.com
U666.12
A
2095-8110(2016)04-0013-06
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
舰船科学技术(2022年10期)2022-06-17
数字海洋与水下攻防(2020年5期)2021-01-04
文教资料(2018年32期)2018-12-24
北京航空航天大学学报(2018年1期)2018-04-20
山东工业技术(2018年4期)2018-02-07
北京航空航天大学学报(2017年4期)2017-11-23
中学生理科应试(2017年2期)2017-04-01
科技创新与应用(2016年34期)2016-12-23
计算技术与自动化(2014年1期)2014-12-12
