
基于新型压电摩擦阻尼器的大底盘隔震结构智能混合控制研究
2016-03-15 03:36樊禹江樊禹彤苗晓瑜余滨杉
水利与建筑工程学报 2016年1期
樊禹江,樊禹彤,苗晓瑜,余滨杉
(1.长安大学 建筑学院, 陕西 西安 710061; 2.长安大学 建筑工程学院, 陕西 西安 710061;
3.西安理工大学 自动化与信息工程学院, 陕西 西安 710048;
4.西安建筑科技大学 土木工程学院, 陕西 西安 710055)
基于新型压电摩擦阻尼器的大底盘隔震结构智能混合控制研究
樊禹江1,2,樊禹彤3,苗晓瑜2,余滨杉4
(1.长安大学 建筑学院, 陕西 西安 710061; 2.长安大学 建筑工程学院, 陕西 西安 710061;
3.西安理工大学 自动化与信息工程学院, 陕西 西安 710048;
4.西安建筑科技大学 土木工程学院, 陕西 西安 710055)
摘要:利用SAP2000大型有限元软件对某大底盘隔振结构进行了地震响应分析,结果表明橡胶支座能够有效降低结构的地震响应,但在El Centro波罕遇地震作用下,橡胶支座由于相对位移过大而发生受拉破坏,导致隔震效果失效。为解决此类问题,利用所提出的新型压电摩擦阻尼器,结合SIMULINK所编制的模糊控制系统,对该大底盘隔振结构进行了有效的混合控制,其中在El Centro波8度罕遇地震作用下,隔震层处位移最大降幅为0.173 m,满足规范对于隔震层相对位移小于0.150 m的要求,避免了橡胶支座由于受拉而导致破坏的问题,从而有效的提高了此类结构的抗震安全及可靠性。
关键词:大底盘隔振结构;层间位移;压电摩擦阻尼器;模糊控制系统;混合控制
近年来,大型商住两用建筑逐步兴起,但这种结构竖向刚度在大底盘与上部结构之间出现较大变化,而往往结构在地震等荷载作用下亦在此处发生破坏,因而在这些刚度发生突变的位置往往需要进行特殊构造。目前,常用处理方法是在刚度突变处进行结构加强,但这种方法会使刚度突变发生转移,从而使结构其他部位发生破坏;另外一种方法则是采用设置橡胶隔震支座的方法将上部结构与大底盘直接进行隔震处理。
对于此类方法,丘湘泉等[1-2]对汕头市博物馆进行了层间隔震动力分析,研究表明,橡胶隔震支座能够有效延长结构的反应周期,避免结构共振。同时下部结构的层间剪力也减小了近60%。祁皑等[3]则将铅芯橡胶支座分别设置所选模型的1层顶、2层顶、4层顶,并进行了相应的振动台试验,结果表明隔震层越靠近整体结构的下部,隔震效果越好。然而目前市场上橡胶支座普遍抗拉性能较差,当隔震结构在罕遇地震作用下时,橡胶支座可能由于受拉,而超过规范[4]中其变形小于支座有效变形直径的0.55倍以及橡胶总厚度的3.0倍的规定,从而导致隔震层整体失效。Ramallo J C等[5-6]为避免出现此类问题,利用磁流变阻尼器及相应控制系统,针对某常见基础隔震结构进行相应的模拟地震振动台试验,结果表明采用该种系统可有效降低隔震层的相对位移,系统稳定性也较之基础隔震结构有所提高。本文拟采用课题组所提出的新型压电摩擦阻尼器,在考虑其基本动态力学计算模型的基础上,利用SIMULINK编制相应的智能模糊控制系统,将其运用于大底盘隔振结构中,在有效保证层间隔震效果的同时提高了隔振系统的稳定性。
1大底盘抗震、隔震结构地震响应分析
本文针对某实际大底盘结构,结构基本信息如下:大底盘共两层,层高4.5 m,柱截面600 mm×600 mm,梁截面400 mm×900 mm;上部结构共8层,层高3.3 m,柱截面500 mm×500 mm,梁截面300 mm×700 mm;结构为全现浇C30混凝土结构,具体结构布置如图1所示。

图1大底盘底层柱网布置图
本工程中橡胶支座采用型号为LRB500的叠层橡胶隔震支座,其参数见表1(γ=100%),隔震支座平面布置图见图2。其直径与个数满足《建筑抗震设计规范》[4](GB50011-2010)要求。

图2隔震支座平面布置图
利用SAP2000建立相应的大底盘隔震结构有限元模型,所得结果如图3所示。其中橡胶支座采用Rubber Isolator支座单元,在设置刚度等参数时采用LRB-500型隔震支座剪切变形为100%时对应的等效刚度和等效阻尼。

表1 LRB500橡胶垫支座的性能参数
按照《建筑抗震设计规范》[4](GB50011-2010)要求,文中选用了El Centro、Taft两条天然地震波及一条人工地震波经加速度调幅后(70 gal(8度多遇)、400 gal(8度罕遇))进行相应的地震时程响应分析。
1.1周期对比分析
通过分析,可得该模型对应的抗震和隔震结构周期,所得结果如表2所示。
由表2可得:大底盘隔震结构通过所设置的LRB500型橡胶隔震支座,其基本周期大幅增加,相较于抗震结构其基本周期延长了近0.663 s,这使得该结构能够在地震作用时远离其特征周期,从而有效的降低结构的地震响应。
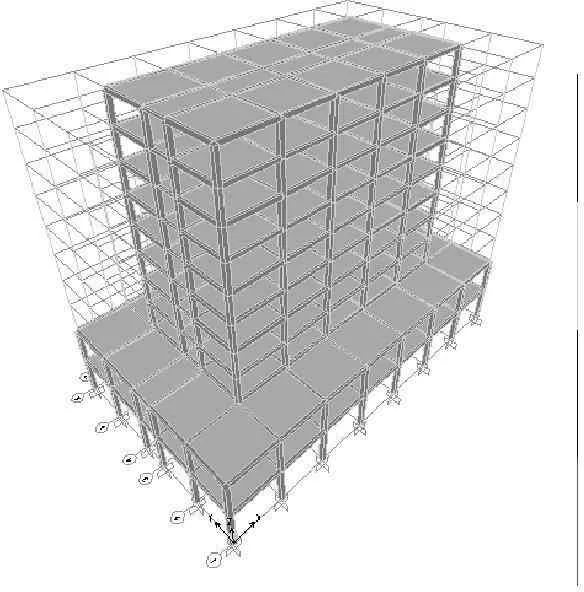

图3 大底盘结构有限元模型
1.2层间位移对比分析
限于篇幅,文中仅列出该模型在El Centro 8度多遇、罕遇水平地震作用下的层间位移幅值,结果如表3所示。

表3 El Centro地震波输入下大底盘抗震结构与隔震
由上述表可得:隔震与非隔振在隔震层处的相对位移有较大变化,该橡胶支座抗拉极限幅值为275 mm,但在El Centro 8度罕遇地震作用下,隔震层相对位移最大值已达295.7 mm,超过了规范[4]限值。因而该橡胶支座可能由于受拉而发生破坏,从而导致隔震层彻底失效。
2新型压电摩擦阻尼器基本构造及动态力学性能
本文所采用的新型压电摩擦阻尼器基本构造(见图4)与基本原理如文献[7]所述,其主要作用即为:压电陶瓷驱动器可根据所采集数据实时调节摩擦阻尼,从而达到对结构的智能控制效果[8]。该新型压电摩擦阻尼器具有响应速度快、摩擦智能可调,并且当控制系统失效时,仍能作为一种被动耗能装置以消耗输入结构中的地震能量,因而也具有抗震可靠性强的特点[9]。经本课题组对其动态力学性能的分析[7],其在简谐荷载作用下的力与位移关系如式(1)及图5所示。


图4 新型压电摩擦阻尼器设计构造图
图5压电摩擦阻尼器的力与位移关系
(1)
其中主要参数,Fd(t)为摩擦片间实时的摩擦力;N0为螺栓预紧固力;t为振动持时;X(t)为阻尼器的相对位移;Umax为阻尼器的最大相对位移。
3模糊控制系统的建立
3.1模糊控制器设计
(1) 模糊论域的确定
对于该大底盘结构模型,常用的方法即利用隔震层相对位移和隔震层相对速度作为压电摩擦模糊智能控制系统的输入量[10],经该控制计算,以输出电流作为模型输出量。
(2) 隶属函数的确定
本文采用三角形隶属函数[10]。利用前述SAP2000对该模型进行分析,从而可确定出速度论域为(-0.8 m/s~0.8 m/s),相对位移论域为(-0.3 m/s2~0.3 m/s2),电流论域为(-2A~2A)。(注:速度及相对位移论域为该实际结构利用SAP2000有限元软件模拟所得允许最大地震反应;电流论域为所设计阻尼器最大控制力时所需的电流值范围)。相对位移、输出电流都采用与相对速度相似的隶属度函数(见图6)。

图6速度隶属度函数
(3) 模糊控制规则
图7是隔震结构在地震动作用下隔震层相对位移响应曲线,对该曲线进行适当的调整,即可得到适用于压电摩擦模糊控制系统的控制规则。相应结果如表4所示。

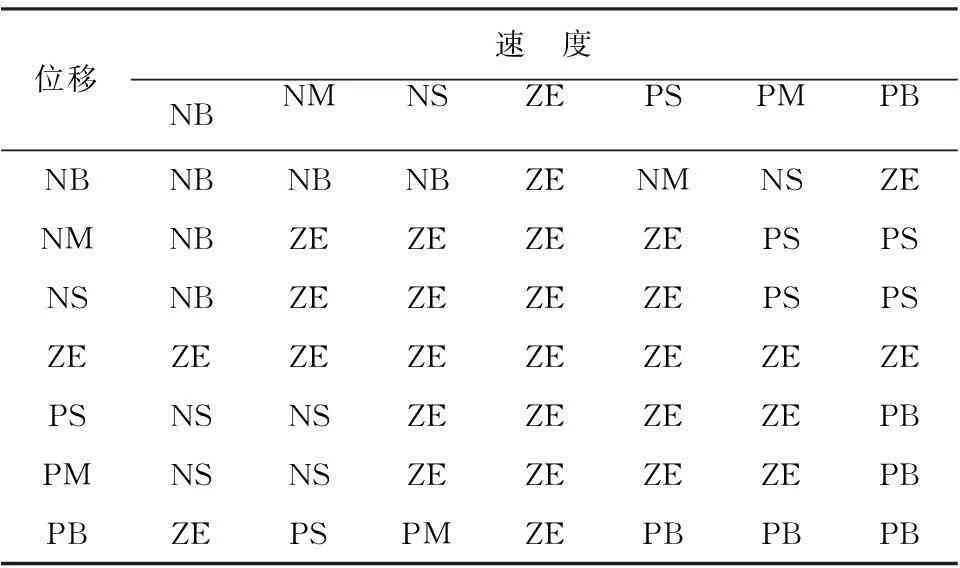
图7 结构位移响应曲线
3.2模糊控制的SIMULINK仿真
本节在SIMULINK工作环境中,建立大底盘隔震结构智能模糊控制系统[12],如图8所示。在地震荷载作用下,经过采集系统,使得模糊控制器实时获得结构隔震层的相对位移和相对速度,经计算可得相应的控制电流,此电流即可实时调整压电摩擦阻尼器的摩擦阻力,从而防止隔震层的位移过大而导致的受拉破坏。
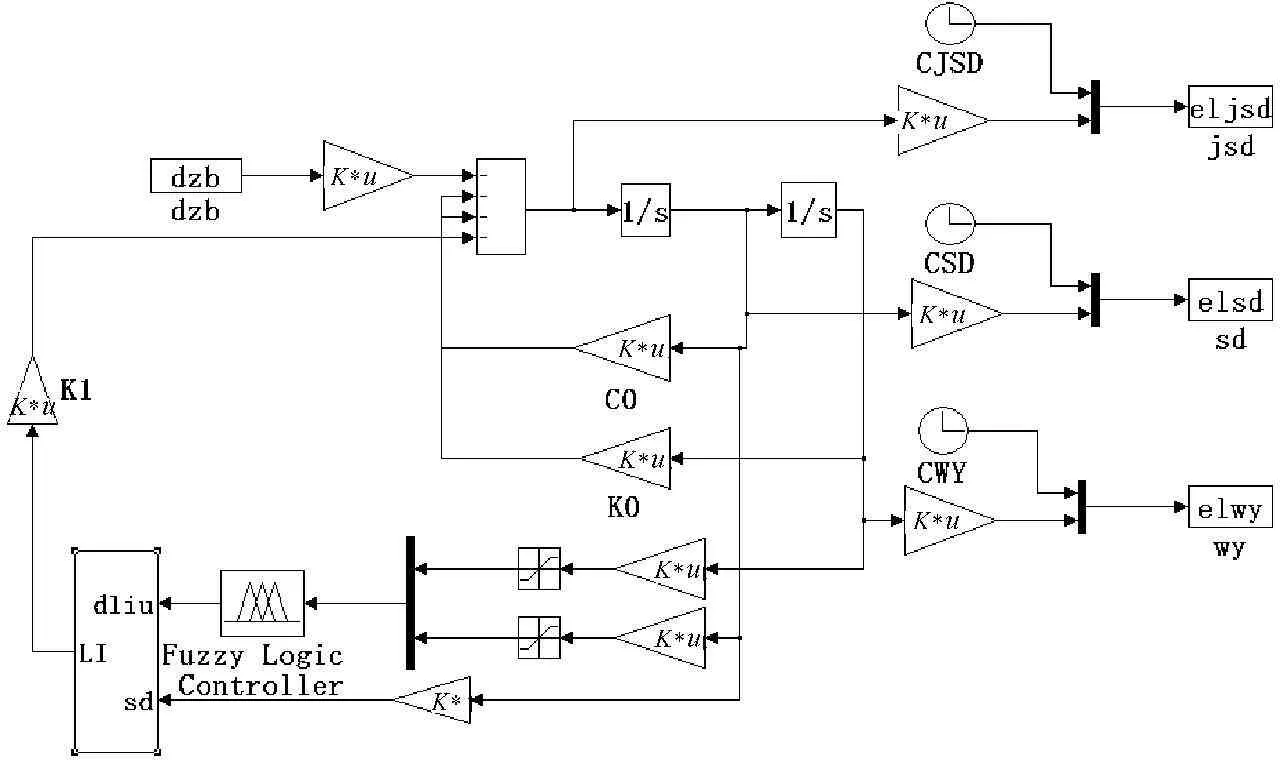
注:dzb:输入受控结构的地震波;jsd:受控结构的加速度反应;sd:受控结构的速度反应;wy:受控结构的位移反应;Fuzzy Logic Controller:模糊控制器。
图8加设控制器的模糊控制系统
4大底盘隔振结构智能模糊控制
将大底盘隔震结构模型在El Centro、Taft及人工地震波作用下,将大底盘隔震结构加设该压电摩擦阻尼器(加设位置如图9)(有控隔震)和大底盘隔震结构(无控隔震)两种状态下的顶层、隔震层、二层层间相对位移进行对比,限于篇幅仅列出El Centro波下各对比图,见图10~图12。


图9 阻尼器布置位置

图10 El Centro顶层相对位移对比

图11 El Centro隔震层相对位移对比
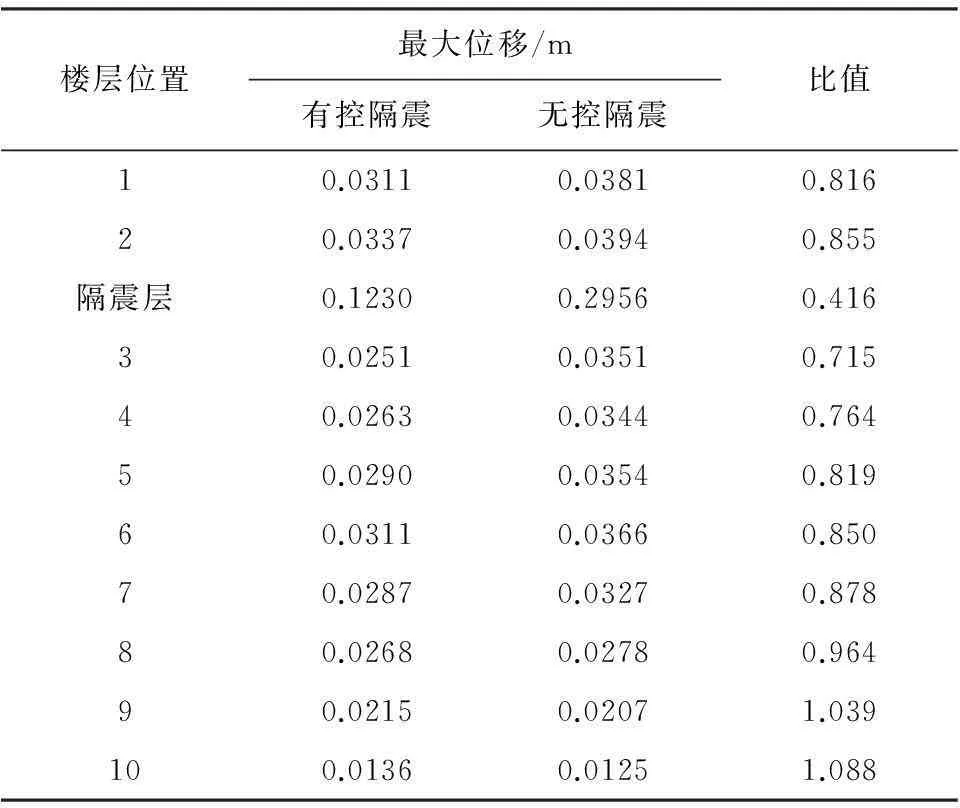
图12 El Centro二层相对位移对比
注:比值=有控隔震/无控隔震。
(1) 由图11及表5可得:在所选压电阻尼器及相应的模糊控制器作用下大底盘隔震结构隔震层相对位移明显减小。在El Centro波作用下最大降幅达0.173 m,表明该套控制系统能够有效降低罕遇地震作用下结构隔震层位移,从而满足相应规范的要求。
(2) 由图10、图12及表5可得:在此模糊控制作用下结构模型顶层相对位移略有增加,最大增幅达0.0011 m;二层相对位移有所减小,El Centro波下最大降幅达0.0057 m。
由上述分析可知:当加设阻尼器后隔震层及以下结构相对位移反应均有所减小,但上部结构反应略有增大。结果表明:橡胶隔震支座在发挥出较好的隔震效果的同时,在罕遇地震作用下亦能够满足规范控制位移要求。
5结论
本文以大底盘隔震结构为核心,首先对该大底盘隔震结构模型运用SAP2000有限元软件进行了模拟分析后发现,在罕遇地震作用下,橡胶支座可能由于受拉而发生破坏,从而导致隔震支座彻底失效。为此在隔振层处加设所提出的新型压电摩擦阻尼器,通过对该阻尼器进行动态力学性能分析,并考虑SAP2000对该大底盘结构的模拟结果,利用SIMULINK建立了相应的智能模糊控制系统,并对该结构进行了相应的混合控制。所得结果如下:
(1) 利用SAP2000有限元软件对所选大底盘隔震结构模型进行分析,该隔震结构能够使得自振周期远离特征周期,从而有效的降低结构的地震响应,但在罕遇地震作用下,橡胶支座可能由于受拉而发生破坏。
(2) 针对所选用的大底盘隔震结构模型,结合所提出的压电摩擦阻尼器并编制了相应的结构模糊控制系统,对所选隔震结构进行了模糊智能混合控制,结果表明该方法能够有效解决在罕遇地震作用下,隔振支座由于受拉而发生破坏,从而导致隔震效果彻底失效这一问题,并且隔震层相对位移越大,智能模糊控制效果越好。
文中所提出半主动压电摩擦阻尼器及编制的智能模糊控制系统,由于时间及试验条件等因素,仅进行了相关阻尼器的研发[7]、控制程序的编制及相应的理论分析,而相应的试验研究未能及时完成。但该方法从理论上证明了该套智能控制系统能够有效提高此类结构的抗震可靠性,并为其抗震设计理论提供了一种新途径。
参考文献:
[1]丘湘泉,周福霖,徐忠根.汕头博物馆隔震设计的几个问题[C]//第三届全国结构减震控制学术讨论会论文集,广州,1995:3-69.
[2]徐忠根,周福霖,丘湘泉.汕头博物馆结构动力分析[J].世界地震工程,1996(2):33-36.
[3]祁皑,郑国琛,阎维明.考虑参数优化的层间隔震结构振动台试验研究[J].建筑结构学报,2009(30):8-16.
[4]中华人民共和国住房和城乡建设部.建筑抗震设计规范:GB50011-2010[S].北京:中国建筑工业出版社,2010.
[5]Ramallo J C, Johnson E A, Asce A M, et al. “Smart” Base Isolation Systems[J]. Journal of Engineering Mechanics, 2002,128(10):1088-1099.
[6]Yoshiok H, Ramallo J C, SPeneer B F. “Smart” Base Isolation strategies Employing Magnetorheological Dampers[J]. Journal of Engineering Mechanics, 2002,128(5):540-551.
[7]王社良,樊禹江,刘苗苗.新型压电摩擦阻尼器动态力学性能的理论分析[J].水利与建筑工程学报,2011,9(4):16-20.
[8]欧进萍.结构振动控制—主动、半主动和智能控制[M].北京:科学出版社,2003.
[9]李宏男.结构振动与控制[M].北京:中国建筑工业出版社,2005.
[10]阎石,李宏男,黎海林.模糊结构振动控制研究的进展[J].沈阳建筑工程学报,2000(16):94-98.
[11]Battaini M, Casciati F, Faravelli L. Fuzzy control of structural vibration-An active mass system driven by a fuzzy controller[J]. Earthquake Engineering and Structural Dynamics, 1998,27(11):1267-1276.
[12]徐赵东,郭迎庆.MATLAB语言在建筑抗震工程中的应用[M].北京:科学出版社,2004.
Intelligent Fuzzy Control of Isolated Structures with Large-chassises Based on Piezoelectric Friction Damper
FAN Yujiang1,2, FAN Yutong3, MIAO Xiaoyu2, YU Binshan4
(1.SchoolofArchitecture,Chang'anUniversity,Xi'an,Shaanxi710061,China;2.SchoolofCivilEngineering,Chang'anUniversity,Xi'an,Shaanxi710061,China;3.SchoolofAutomationandInformationEngineering,Xi'anUniversityofTechnology,Xi'an,Shaanxi710048,China;4.SchoolofCivilEngineering,Xi'anUniversityofArchitectureandTechnology,Xi'an,Shaanxi710055,China)
Abstract:The seismic response analysis was conducted on an isolated structure with large-chassis by using the finite element software SAP2000. The results indicate that under El Centro wave in rare earthquakes, the rubber bearing is prone to tensile failure due to large relative displacement, therefore leads to the failure of the whole isolated structure. In order to solve this problem, a new piezoelectric friction damper was adopted to control this isolated structure with large-chassis in the combination of the fuzzy control system developed using SIMULINK. According to the results, the displacement of the isolation layer reduced up to 0.173 m, which meets the maximum displacement requirement of 0.150 m in the specifications. This method solved the problem of tensile failure and improved the seismic safety and reliabilities of this kind of isolated structures.
Keywords:large-chassis isolated structure; layer displacement; piezoelectric friction damper; fuzzy control system; hybrid control
文章编号:1672—1144(2016)01—0039—06
中图分类号:TU352.1
文献标识码:A
作者简介:樊禹江(1987—),男,陕西西安人,博士,讲师,主要从事再生混凝土结构基本理论,工程结构抗震基本理论等研究工作。
基金项目:国家自然科学基金(51178388,51108035);陕西省自然科学基金(2013JM7030)
收稿日期:2015-08-07修稿日期:2015-09-09
DOI:10.3969/j.issn.1672-1144.2016.01.008
E-mail: fanyujiangchd@163.com
