
无人机侦察图像目标定位在军事上的应用研究
2016-03-15 06:47孙文邦
红外技术 2016年6期
杨 帅,程 红,李 婷,孙文邦
无人机侦察图像目标定位在军事上的应用研究
杨 帅,程 红,李 婷,孙文邦
(空军航空大学,吉林 长春 130022)
无人机能够通过多种方法定位出目标的精确位置信息,以便实施战场指挥或军事打击。主要整理并分类介绍了无人机侦察图像目标定位的各种技术原理,解析了其在军事领域的应用范围;并以无人机飞行任务为模型,完整详细地用空间量算的无人机侦察图像目标定位技术对无人机实际飞行进行航迹规划的运用,证明了无人机侦察图像目标定位技术的重要军事价值。
无人机;侦察图像;目标定位;军事应用;精确打击;航迹规划
0 引言
无人机(unmanned aerial vehicle)是现代战争中不可或缺的一部分,它与间谍卫星、侦察机、预警机组成了现代侦查网络。无人机以其无人化、造价低、灵活机动的特点,取代大型有人侦察机成为战场前沿最主要的侦查力量[1]。无人机侦察作为先进的遥感数据获取方式,已在军事侦察、目标监视、毁伤效果评估、地图测绘、徒弟利用调查、灾情监测、气象探测等领域广泛应用,产生了巨大的经济、军事和社会效益、展现了广泛的应用前景。
由于无人机的突出优势及其在局部实战中表现出的巨大军事价值,世界各国都在积极地研究发展无人机,而美、英、俄和以在无人机领域处在世界领先地位。
美国是无人机研制和装备的大国,其代表无人机是RQ-4全球鹰(Global Hawk)和MQ-1捕食者(Predator)。全球鹰具有多种高精度的目标定位方法,是美国空军乃至全世界最先进的无人机,不仅可以在大范围内通过雷达搜索目标,还能获取7.4万km2范围内的目标光电/红外图像信息。在20km的高空上,通过合成孔径雷达侦察获得的条幅式照片具有1m的精度,定点侦察照片的精度则高达0.3m,对20~200km/h速度移动的地面目标,也能达到7m的定位精度。定点侦察照片可精确到0.30m,目标定位的圆误差概率最小可达20m;此外,英国的“不死鸟”型中程无人机则是通过红外探测装置进行全天候的照相侦察;俄罗斯的“熊蜂”无人机可利用机载可变焦的摄像机以及可全天候工作的红外照相机对军队的作战部署进行有效侦察;以色列研制出了全世界首架垂直起降的无人机“黑豹”和高空战略长航时无人机“苍鹭”,能执行全天候的战斗侦察任务,并且可以通过机载的光电/红外/雷达等侦察电子设备进行目标定位情报收集等军事任务。
我国在军用无人机领域同样发展迅速,“翔龙”、“翼龙”和“WJ-600”无人机是我军杰出的代表作,他们装载了光电探测侦察设备以完成目标定位、战场侦察和成像制导等作战任务[2]。
1 无人机目标定位
无人机目标定位就是基于摄影测量、图像处理和信息处理等技术,通过对无人机侦察以及与图像处理相关的遥测数据的处理与分析,提取目标精确三维坐标的过程[3-4]。目前,利用无人机进行目标定位的方法主要有3种:
1)基于无人机遥测数据的实时定位。这种方法直接将无人机对目标定位的瞬间的位置信息、姿态信息,以及侦察转台的转角信息、测距信息等输入定位结算模型,从而可以快速结算目标位置坐标。该方法具有实时性好的突出优点,故被所有现役无人机定位系统采用。
2)基于图像配准的非实时定位。这种方法是建立在预先基础图像的条件下,经过数字化处理和几何纠正的无人机视频图像与预先基准图像进行高精度匹配,进而实现所关心目标的精确定位。该方法目标定位精确度高、可多点同时定位等突出优点,但实时性制约应用范围。
3)基于空间交会的目标定位。这种方法本质上是第1种方法的扩展。无人机执行侦察时,发现感兴趣目标,进入跟踪状态,激光测距得到目标距离,采集跟踪后的遥测数据和图像数据,之后进行数据信息综合,利用交会模型对同一目标进行目标定位。
2 军事应用分析
无人机目标定位能过精确测量目标的三维位置坐标,进而可以计算其运动变化规律、分析属性,以及对周围其他对象的相关制约、相互影响的关系,最终能够预判目标的威胁和意图。它可以代替部分卫星的传统测绘定位,获取目标地理空间情报;若将其纳入战术军事地理信息系统(战术MGIS),可为指挥员认识战场地形环境提供现代化的工具和手段。以下是几种具体的无人机定位技术在军事上的应用:
2.1 精确打击
精确打击(precision striking)是无人机目标定位最主要、也是最重要的作用[5-6]。现代的无人机都具有侦察和打击一体化的功能,无人机在执行侦察飞行任务时,地面操作人员通过控制光电系统,可以在昼夜以及不良气候的条件下,克服无人机在飞行过程中的振动或其他外部干扰,测量出目标准确实时的三维位置坐标,对军事情报工作具有非常大的用途。无人机一旦定位出可疑威胁目标,立即可以对目标进行高精度的打击任务。整个过程符合了的新时代军事作战的理念——发现即摧毁。
2.2 导航定位
随着无人机的应用发展,使得参战人员获取视距外远程目标参数的能力大大提高。操作人员获得的无人机目标定位实时三维位置信息,不仅仅可以帮助无人机进行精确打击任务,同时还可以作为其他武器平台导航定位的工具。无人机目标定位信息作为精确制导武器的眼睛,指引远程攻击武器进行打击[7]。例如,作为舰炮上远程导弹武器对岸上超视距目标攻击的导航定位应用。
2.3 航迹规划
航迹规划(path planning)是根据任务目标规划满足约束条件的飞行轨迹,是无人机任务规划的关键技术之一[8]。无人机实际飞行中如果实时定位出突发威胁目标(如防空导弹、扫描雷达等)位置情况,必须进行航迹重规划,以便规避威胁可以快速获得修正航迹段,并替换原突发威胁航迹段。整个飞行过程中,无人机根据实时高效测量定位的威胁信息,不断修正参考航迹,直至达到目标节点。
3 无人机目标定位在飞行任务模型中的运用
无论是对军事情报保障效率性的提高、还是对基础地理空间情报的自动解算及分析能力的增强,无人机目标定位技术都充当着重要角色。
3.1 飞行任务模型介绍
从无人机飞行任务实际出发,主要针对无人机在飞行任务执行过程期间,对无人机目标定位的具体应用进行论述。
本文旨在利用无人机目标定位方法,解决无人机飞行任务中与航迹规划有关的问题。故建立简单实用的模型,将飞机目标简化为点实体,以其质心代替,并假设其他情况一切正常。此飞行任务模型中,无人机目标定位内容的应用主要体现在对空间目标测量坐标信息的获取、以及对信息的分析和表达和航迹规划等方面;而前两者帮助后者,做出相应变化的新航路规划提供依据。
3.2 目标空间量算的具体应用
1)飞行航迹规划
军用无人机航路规划最大的特点是需要应对复杂多变的环境,无人机目标定位是利用强大的机载传感器和处理器进行实时航路规划,进而实现威胁回避、地形跟踪和地形回避等[9]。
通过对部队飞行团的调研工作,发现无人机飞行中并不能仅仅按照预先设定好的航迹飞行;而是应该根据飞行的实际情况来,实时的修正飞行航迹,主要用来应对突发的威胁目标,保证无人机能够安全的飞行。当测量定位到无人机飞行路线上有危险目标时,无人机快速进行航迹调整,即本来按照1®®2路线(线1)飞行(如图1);可是,根据定位到的危险情况,此航迹并非安全航迹。此时就需要制定如下安全的飞行航迹路线,线2方式进行飞行;显然此航线更安全也更接近大地线(线0),安全性更加高于原来的飞行路线。
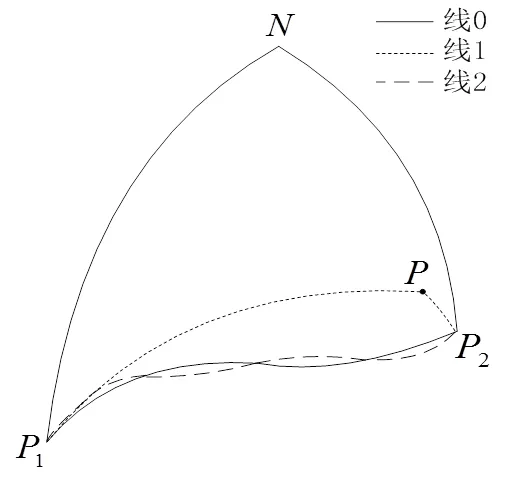
图1 传统飞行航线
2)飞行前的地面航路规划
由于飞机在飞行时不只是按照大地线飞行,有时也会做如图2所示的圆弧运动(如从某一直飞航路到另一直飞航路的掉转弯曲航路)。因此,在设计整个飞行航路前,首先明确飞机圆弧航路飞行时的具体运算方程和点位坐标计算。
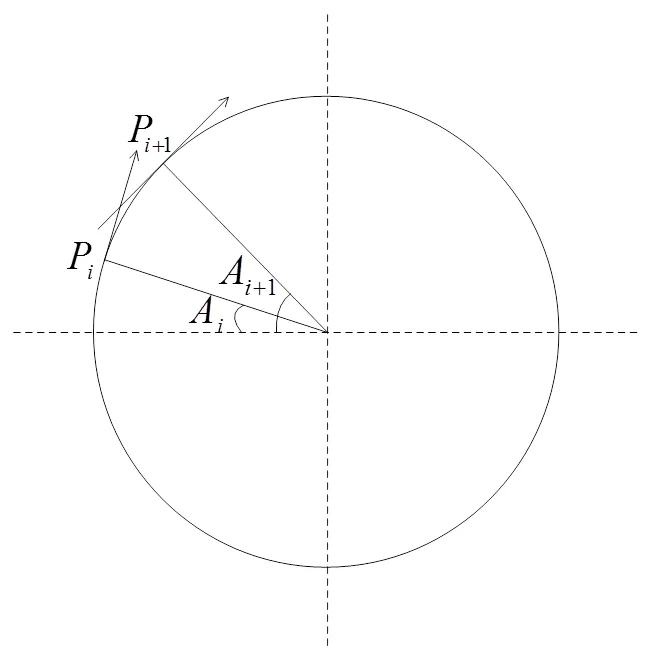
图2 飞机圆弧运动示意图
设飞机进行圆弧航路飞行的初始位置为P(B,L)、结束位置为P+1(B+1,L+1)。其中P为已知条件,P+1为待求参数。具体计算如下:
P与P+1间大地线距离与方位角的计算如下式:
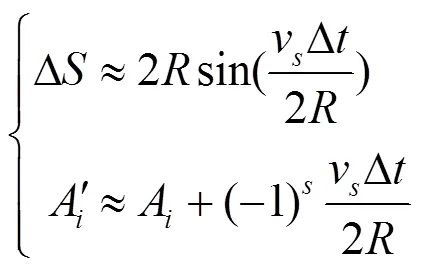
式中:D为P与P+1间大地线距离;为曲率半径;s为飞行速度;表示飞机的航路状态,若是直飞,=0,若是圆弧飞,=1;D为飞行时间;A和A¢分别为P的方位角和P与P+1间的方位角。
利用大地线微分方程计算经纬度和方位角增量:
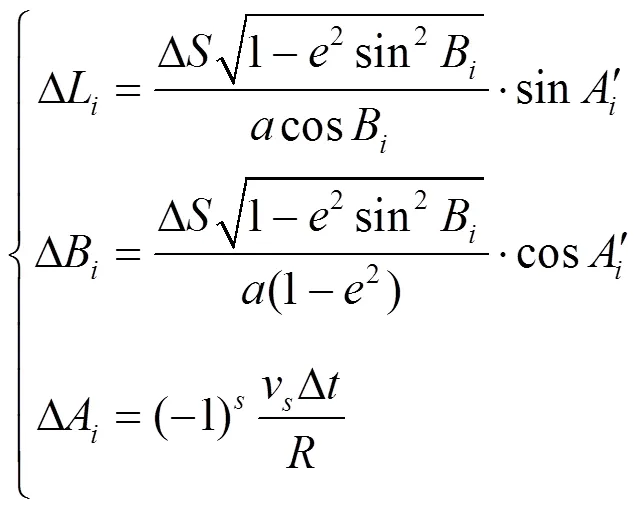
式中:DL为P与P+1的大地经度差;为椭球偏心率;为椭球长半轴;B为P的大地纬度;DB和DA分别为P与P+1的大地纬度差和大地方位角差。
因此,D时间后的经纬度和大地线方位角为:
利用式(1)~(3)迭代计算圆弧各点经纬度,直到经纬度达到预设终点精确范围,航迹线进入下一段,即由该点出发的大地线。
航路的规划的流程如图3所示,具体的步骤阐述如下:
①设定航路的起点与终点。
②判断两点间飞机的航路状态:直飞还是圆弧飞行。
③若是直飞,则调用基础空间量算反解模块计算航线距离和终点处的航线角(起飞点也计算飞机的起点航线角);若圆弧飞行,则调用圆弧运动解算模块计算航线距离和终点航线角。
④调用目标量算信息表达模块,绘制航路线。
⑤循环上述4个步骤,直到任务完成。
⑥最后,输出航路设计模型,无任务圆满完成做好准备。
3)目标定位在飞行期间的态势判断及航路调整
若是作战中的飞行任务,指挥中心必须了解战场态势,即需要直观地了解敌我双方的目标分布,以及对某个目标进行目标属性的识别和对其进行实时定位跟踪等[10]。因此,在飞行期间,无人机操作人员为规避危险,必须做好防护措施,指挥部实时定位跟踪我机的同时,以飞机位置为圆心,以一定长度为半径的区域之内收索是否有敌情发现,进行冲突检测;当发现在点击的范围内同时出现多个敌方目标时,则将距我机最近的敌方目标作为首要攻击规避对象,形象地描述如图4所示。
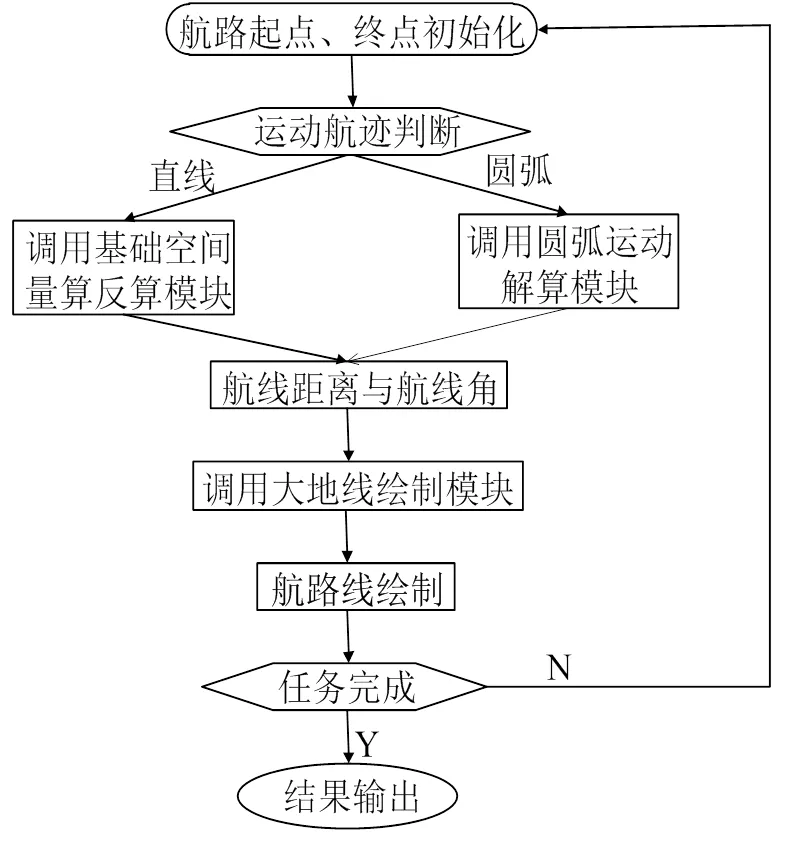
图3 计划飞行任务的地面航路规划流程图
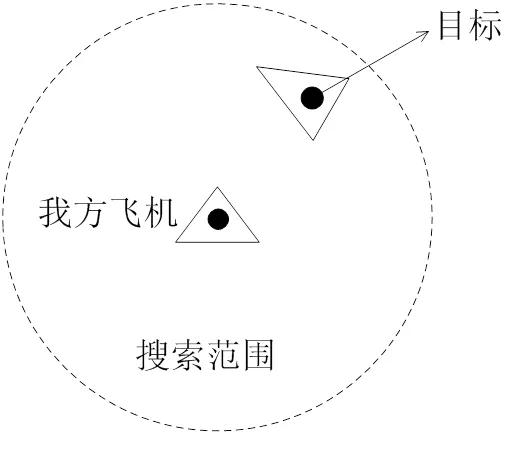
图4 定位对象搜索
无人机目标定位所要完成的任务就是:①利用中继平台与侦察图像目标间的距离和方位,实时定位动态目标;②利用基础空间量算的反算模块,判断我方飞机与目标的空间位置关系;③利用实体空间量算和信息表达方法,对执行任务飞机的威胁区实时监控,做好防护[11]。图5即为飞行期间,无人机目标定位在侦察任务中的具体应用。
3.3 无人机目标定位实现的情报功能与信息展示
1)总结整个飞行任务模型,利用空间量算可实现的情报功能
①飞机动态跟踪:我方无人机在飞行过程中通过数据链向指挥部发送信息、报告飞行状况,包括所处的地理位置、飞行状态等;敌方信息则通过二次雷达、地空数据链等中介平台向地面报告。通过数字地球将敌我飞机的地理位置实时地显示在监控窗口中,做到信息可视化。指挥员在数字地球上掌握所有被监控飞机的地理位置和与监控飞机有关的其他信息。
②航行监视:在动态监控过程中,可针对某一架或某几架飞机利用无人机目标定位量算进行特殊跟踪,在航线设计时充分考虑偏航极限范围内有无不适合的点、线、面,即危险目标;在航路监视时,将其计划航线与实际飞行航线比较,实时计算并显示飞机的实际飞行航线与预计航线的偏差,如果超过偏离误差则向指挥员报告。
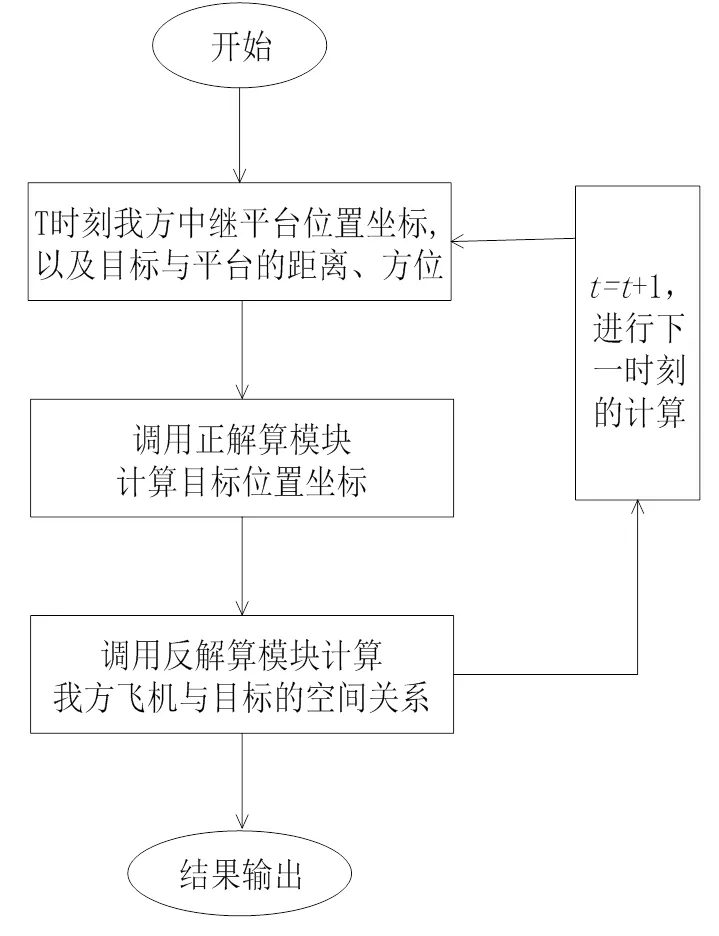
图5 飞行期间关于目标位置的空间测量
③冲突检测和解脱:对于监控的无人飞机,以它的位置为中心、以一定距离为半径实时建立球形缓冲区,实时地(或周期性地)监控有无危险目标进入;当有冲突发生,实时计算威胁目标空间信息,具体地,运动目标的高度、速度、飞行方向、威胁范围等属性信息,静止目标的或长度、或周长与面积、或坡度坡向等属性计算,以及威胁目标与我机的距离与方位等,并根据这些信息制定解脱方案。
④航迹绘制:存储每个定位点信息,为提高程序的效率和便于分析人员观看整个态势效果,目标的航迹信息初始默认为隐藏状态,当需要查看时利用大地线绘制原理插值并连线定位点以进行航迹显示[12]。
2)部分信息的展示
图6为我方遂行任务飞机监控界面,图7为冲突检测图,图8为飞行航迹显示图。
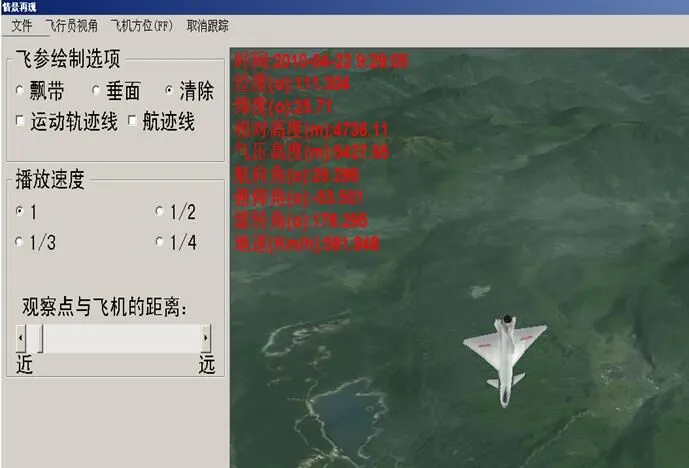
图6 地面操作无人机的飞行属性界面
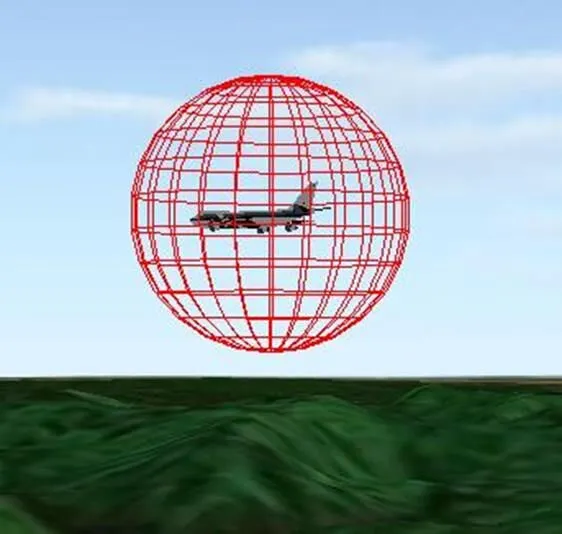
图7 冲突检测区域图

图8 飞行航迹显示
此模型不仅仅适合无人机飞机,也可推广到有人飞机和其他任何执行飞行侦察作战任务的飞行器,或者其他应用领域。
4 结论
随着现代战争的发展变化,无人机侦察图像目标定位技术在军事上的应用非常普遍。目标定位技术有着巨大的情报保障价值和作战指挥作用,决定着战争胜负意义重大。无人机侦察图像目标位置测量技术,是无人机信息处理研究的重点和热点,无人机侦察图像目标定位直接关乎到无人机作战效能和作战保障能力。本文通过无人机战场飞行实际情况,对无人机侦察图像目标定位在航迹规划的应用情况做了具体阐述,证明无人机侦察图像目标定位的重要军事价值。
由于无人机侦察图像目标定位的精确度、时效性和普适性等性能对无人机能否在更加高效地运用到军事上具有决定性的作用,所以需要进一步提高和改善这些定位性能,这是关于无人机侦察目标定位需要一直研究下去的问题;并且不仅仅把这些无人机定位性能运用到军事上,更可以运用到人们的日常生活中。
[1] 邵慧. 无人机高精度目标定位技术研究[D]. 南京: 南京航空航天大学, 2014.
SHAO Hui. Research on high precision target localization technology in UAV[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2014.
[2] 陈小双, 翟为刚, 赵万里. 美国及中国军用无人机的新发展与性能分析[J]. 舰船电子工程, 2011, 31(7): 26-28.
CHEN Xiaoshuang, ZHAI Weigang, ZHAO Wanli. New development and performance analysis of U.S. and Chinese military UAV[J]., 2011, 31(7): 26-28.
[3] 都基焱, 段连飞, 黄国满. 无人机电视侦察目标定位原理[M]. 合肥: 中国科学技术大学出版社, 2013.
DU Jiyan, DUAN Lianfei, HUANG Guoman.[M]. Hefei: University of Science and Technology of China Press, 2013.
[4] 何文涛. 无人机定位技术及其应用[J]. 光电技术应用, 2003, 73(5): 3-6.
HE Wentao. UAV positioning technology and its application[J]., 2003, 73(5): 3-6.
[5] Song L, HUANG C, WU W. Target attack decision-making for cooperating multi-UCAV[J]., 2011, 33(7): 1548-1552.
[6] 金凤来, 李厚朴, 边少锋. 提高航迹计算精度的方法研究[J]. 海洋测绘, 2009, 29(1): 18-20.
JIN Fenglai, LI Houpu, BIAN Shaofeng. A study on the method for improving the accuracy of track calculation[J]., 2009, 29(1): 18-20.
[7] 张楠, 王潇, 王军力. 无人机在陆军精确打击体系中的应用研究[J]. 兵工学报, 2010, 31(S2): 107-111.
ZHANG Nan, WANG Xiao, WANG Junli. Research on unmanned air vehicles applications in precise attack system of army[J]., 2010, 31(S2): 107-111.
[8] 王勤, 叶蕴青. 无人机在海军作战领域应用[J]. 指挥信息系统与技术, 2012, 3(4): 36-40.
WANG Qin, YE Yunqing. UAV Application of unmanned aerial vehicle in navy[J]., 2012, 3(4): 36-40.
[9] 李欣, 王树连. 美军的战斗地形信息系统[J]. 中国测绘, 2008(2): 60-63.
LI Xin, WANG Shulian. American terrain system[J]., 2008(2): 60-63.
[10] 程红, 仇荣超, 孙文邦. 遥感图像目标的定位算法[J]. 红外技术, 2015, 37(7): 831-837.
CHENG Hong,QIU Rongchao,SUN Wenbang. Location algorithm of the target in remote sensing image[J]., 2015, 37(7): 831-837.
[11] 樊邦奎, 段连飞, 赵炳爱. 无人机侦察目标定位技术[M]. 北京: 国防工业出版社, 2014.
FAN Bangkui, DUAN Lianfei, ZHAO bing’ai.[M]. Beijing: National Defense Industry Press, 2014.
[12] 胡中华. 基于智能优化算法的无人机航迹规划若干关键技术研究[D]. 南京: 南京航空航天大学, 2011.
HU Zhonghua. Research on some key techniques of UAV path planning based on intelligent optimization algorithm[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2011.
Military Application of UAV Reconnaissance Target Localization
YANG Shuai,CHENG Hong,LI Ting,SUN Wenbang
(,130022,)
UAVs can locate the precise location information of targets through a variety of methods in order to implement battlefield command or a military strike. The various sorting and classification principles of UAVs reconnaissance targeting technology are described, and its scope of application in the military field is parsed. UAV mission is taken as an example, in which a detailed calculation of the amount of space UAV reconnaissance targeting technique is performed by using the actual flight path planning of UAV reconnaissance,which proves targeting technology has an important military value.
UAV,reconnaissance image,target location,military application,precision striking,path planning
V279
A
1001-8891(2016)06-0467-05
2016-01-04;
2016-03-17.
杨帅(1992-),男(汉族),辽宁锦州市人,硕士研究生,主要研究领域为无人机定位技术。
程红(1969-),女(汉族),吉林长春市人,教授,硕士研究生导师,主要研究领域为成像侦察。
国家自然科学基金(61301233);全军军事类研究生资助课题项目(2013JY514)。
猜你喜欢
环球时报(2022-05-30)2022-05-30
青年歌声(2019年12期)2019-12-17
当代陕西(2019年11期)2019-06-24
北京航空航天大学学报(2017年7期)2017-11-24
作文周刊·小学一年级版(2017年9期)2017-06-20
北京航空航天大学学报(2016年6期)2016-11-16
小学生导刊(低年级)(2016年8期)2016-09-24
哈尔滨商业大学学报(自然科学版)(2016年4期)2016-09-02
海军航空大学学报(2015年3期)2015-11-11
中学历史教学(2015年11期)2015-11-11
