Internet环境下遥操作机器人系统的无源控制研究
2016-03-12 18:47李国栋纪磊刘向杰
科技资讯 2015年24期
李国栋++纪磊++刘向杰
摘 要:将Internet作为系统的通信通道以后,遥操作机器人系统的研究实现了非常大的发展。但是遥操作机器人系统的稳定性和透明性问题至今仍没有得到较好的解决。该研究设计了一种最大程度上模拟Internet真实状况的网络仿真模型。除此之外,为了提高系统的稳定性,提出带有滤波器和主从端控制器的无源控制方法。最后,通过实验得到验证。
关键字:遥操作机器人 无源理论 时延 透明性
中图分类号:TP242 文献标识码:A 文章编号:1672-3791(2015)08(c)-0010-03
现今,Internet作为遥操作机器人系统的通讯通道已经很普遍了。这是因为相比起专用传输网络,Internet铺设更加方便,成本更加便宜。然而,Internet中存在可变时延以及数据丢包现象会造成主从端通信障碍,导致整个系统的不稳定[1]。因此,这两个问题亟待解决。
针对网络遥操作机器人系统的传输时延问题,许多学者已经提出了很多控制方法。Ning Xi[2]等人提出基于事件的控制方法来解决遥操作系统中存在的这些问题。然而与时间无关的合适变量很难找到。Akihito Sano[3]利用控制理论实现了系统在面对较大的通讯时延状况下的稳定性。但是这种方法不适用于存在可变时延和丢包的系统中。
和其他控制方法相比,无源控制方法可以应用于线性,非线性以及连续,离散遥操作系统中,应用范围广泛并在保证系统稳定性有很大的优势[4]。为了使描述更加清晰,该研究讨论单自由度线性系统。基于本文设计的网络模型,提出滤波器加控制器的方法来提高遥操作机器人系统的稳定性和透明性。除此之外,该研究的结论也可以延伸至n自由度非线性系统中,这是因为简单的质量块-弹簧-阻尼遥操作模型是唯一的一种可以移植到非线性系统的线性动态力学模型[5]。
第二部分中该研究提出了遥操作系统主从端的动力学模型、网络模型以及透明性量化方法。第三部分通过实验得到仿真的结果,最后第四部分是结论。
1 遥操作系统模型
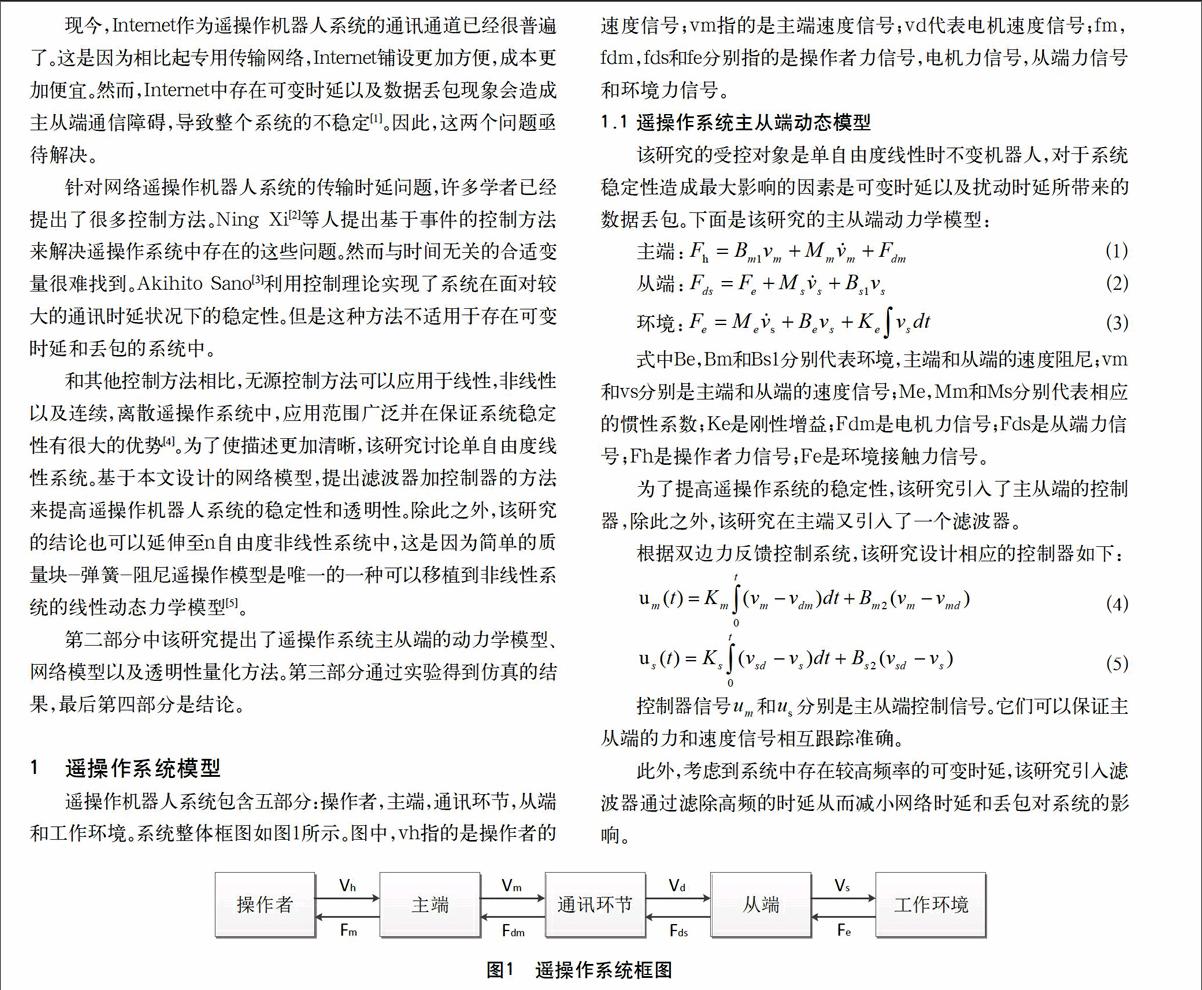
遥操作机器人系统包含五部分:操作者,主端,通讯环节,从端和工作环境。系统整体框图如图1所示。图中,vh指的是操作者的速度信号;vm指的是主端速度信号;vd代表电机速度信号;fm,fdm,fds和fe分别指的是操作者力信号,电机力信号,从端力信号和环境力信号。
1.1 遥操作系统主从端动态模型
该研究的受控对象是单自由度线性时不变机器人,对于系统稳定性造成最大影响的因素是可变时延以及扰动时延所带来的数据丢包。下面是该研究的主从端动力学模型:
主端: (1)
从端: (2)
环境: (3)
式中Be,Bm和Bs1分别代表环境,主端和从端的速度阻尼;vm和vs分别是主端和从端的速度信号;Me,Mm和Ms分别代表相应的惯性系数;Ke是刚性增益;Fdm是电机力信号;Fds是从端力信号;Fh是操作者力信号;Fe是环境接触力信号。
为了提高遥操作系统的稳定性,该研究引入了主从端的控制器,除此之外,该研究在主端又引入了一个滤波器。
根据双边力反馈控制系统,该研究设计相应的控制器如下:
(4)
(5)
控制器信号和分别是主从端控制信号。它们可以保证主从端的力和速度信号相互跟踪准确。
此外,考虑到系统中存在较高频率的可变时延,该研究引入滤波器通过滤除高频的时延从而减小网络时延和丢包对系统的影响。
为了便于对遥操作系统的仿真,该研究利用电路元器件来仿真系统各部分。首先定义电压信号为相应的力信号,电流信号为速度信号。在电路中,电感定义为,所以电感可以代表惯性参数M。同样,速度阻尼B可用通过电阻来替换,刚性增益K可以由电容来代表。
1.2 遥操作系统的网络模型
基于Internet的遥操作系统的时延主要有传输时延Tc,执行时延Tp,扰动时延Tv。为了尽可能方便且使仿真最大化接近真实网络时延,该研究忽略执行时延Tp和扰动时延Tv,因为它非常小。
该研究利用相位改变方法模拟传输时延中的固定时延,这种方法是通过改变前向通道和反向通道的电容和电感大小来改变传输网的相位角。电路中相位角的改变相应地在遥操作系统中就是固定时延大小的变化。该研究利用支路选择法模拟传输时延中的可变时延,这种方法在前向和反向通道上建立不同的相位角,不同的通道有不同的时延。在每条通道上有一个随机数发生器,一个RLC串联电路和一个二极管。随机数发生器可以产生一系列随机数来控制二极管的通断从而改变每条支路上时延的大小。
对于网络丢包,经过多次尝试后,该研究选择使用晶闸管和随机数发生器也叫做丢包发生器来模拟。丢包是由于系统中的扰动误差造成的,例如数据序列混乱和数据丢失。而丢包发生器的工作原理是随机地切断,闭合传输网从而模拟数据的丢包。换句话说,当晶闸管切断电路时,传输网就会断掉而此刻主从端间传输的数据就会丢失,当晶闸管闭合电路时,数据传输又会正常。
1.3 透明性量化分析方法
2001年,Yokokohji等人[6]提出了透明指数的概念,在无时延情况下的多种控制策略的透明性已经能够进行定量分析。该研究根据所设计的电路仿真采用另一种相对简单的透明性定量分析的方法。
在该系统中力信号等效为电压信号,速度信号等效为电流信号,因此
(6)
式中,Ze和Zh是电阻,他们分别被称为从端环境阻抗和操作端阻抗。对透明性定量表示为:
(7)
式中,ρ代表系统的透明度。时,系统的透明性非常好;时系统透明性很差;当时系统完全透明。
2 实验及结果
仿真环节加入了可变时延和丢包并设定控制器信号传输频率为50 Hz,系统时延小于200 ms。
为了得到更有效的数据,该研究解决两个问题。第一是跟踪问题。理想情况下,系统的主端力信号应当跟踪从端力信号并且从端速度信号应当跟踪主端速度信号。如果存在可变时延的影响,那么一端就不能跟踪另一端信号,系统就会不稳定。
第二是透明性问题。透明性指的是系统一端信号跟踪另一端信号的准确度。不完全透明性会导致操作者的感受和系统从端机械手受到的实际情况不同进而造成系统的不可控。在该研究实验中,该研究通过测量几个不同的力信号跟踪情况来测试系统的透明性。
考虑到传输网的可变时延,传输环节公式为
(10)
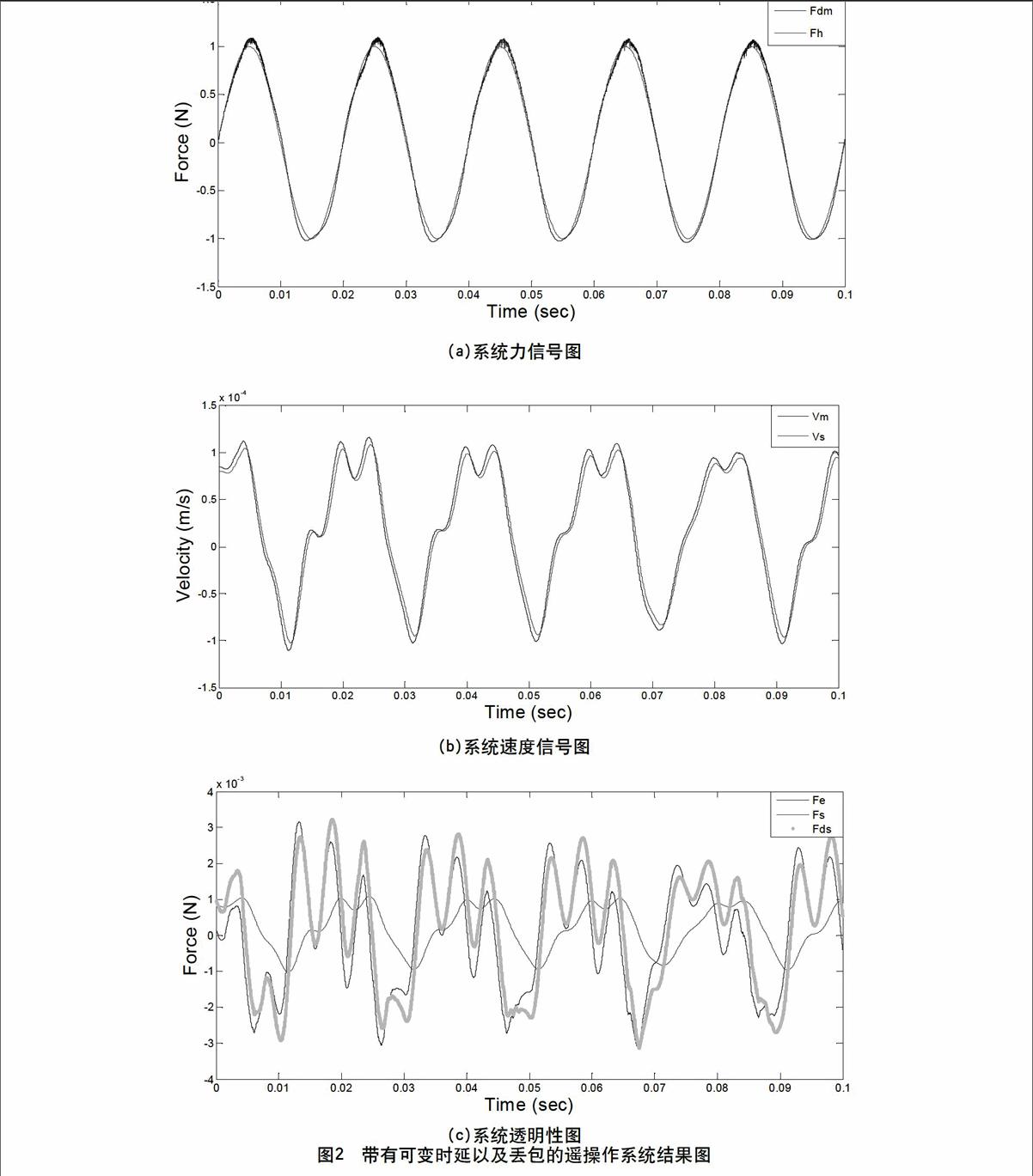
式中,是可变时延并且它们的时延上限小于200ms。实验结果在图2中显示。
图2(a)可以看出主端力信号Fh完全跟踪从端力信号Fdm。系统的输入力信号为正弦信号并且Fdm并没有较大的失真。因此,遥操作系统的仿真是稳定的。
图2(b)可以看出主从端速度信号Vm,Vs的跟踪也是具有较高的保真度并且网络时延对于信号的影响也较明显的减小。
图2(c)可以看出Fe与Fds信号几乎相同,这说明系统的透明性较高。
通过计算公式(7),系统透明性量化值为。
3 结语
该研究设计了一种独特的基于电气元器件的遥操作网络模型,最大程度地模拟了真实网络状况,并在此基础上仿真了遥操作系统的运行。
针对基于Internet的遥操作系统,该研究引入了滤波器以及主该研究本文可以得出滤波器和主从端控制器明显减小了Internet时延对系统的影响。仿真中通过主从端力和速度信号的跟踪情况以及透明性量化值ρ也证明了这一点。
参考文献
[1] TB Sheridan. Space teleoperation through time delay: Review and prognosis [J].IEEE Transactions on Robotics and Automation,1993,9(5):592-606.
[2] Ning Xi, Tarn TJ. Action Synchronization and Control of Internet Based Telerobotic Systems [C].Robotics and Automation,1999 IEEE International Conference,1999:219-224.
[3] Sano Akihito, Fujimot Hideo, Tanaka Masayuki. Gain-Scheduled Compensationfor Time Delay of Bilateral Teleoperation Systems [C].in IEEE International Conference on Robotics & Automation,1998(3):1916-1923.
[4] Ali Jazayeri, Matthew Dyck, Mahdi Tavakoli. Stability Analysis of Teleoperation Systems under Strictly Passive and Non-passive Operator[C].in IEEE World Haptics Conference,2013:695-700.
[5] Zhu WH, Xi YG, Zhang ZJ, et al. Virtual decomposition-based control for generalized high-dimensional robotic systems with complicated structure[J].IEEE Transactions on Robotics and Automation,1997,13(3):411-436.
[6] Yokokohji Y, Yoshikawa T. Maneuverability of Master-Slave Telemanipulation Systems [J].Transactios of the Society,1990(1):107-115.
猜你喜欢
设计(2022年8期)2022-05-25
建材发展导向(2021年9期)2021-07-16
电子制作(2019年23期)2019-02-23
测控技术(2018年6期)2018-11-25
通信技术(2018年4期)2018-05-05
制造技术与机床(2017年6期)2018-01-19
系统工程与电子技术(2016年7期)2016-08-21
电测与仪表(2016年24期)2016-04-12
电测与仪表(2016年17期)2016-04-11
探测与控制学报(2015年4期)2015-12-15