基于混沌蚁群优化算法的PMSM参数优化控制
2016-03-12 05:59太原重工技术中心李超峰
电子世界 2016年23期
太原重工技术中心 李超峰
湖南世优电气股份有限公司 王志琛
基于混沌蚁群优化算法的PMSM参数优化控制
太原重工技术中心 李超峰
湖南世优电气股份有限公司 王志琛
针对永磁同步电机直接转矩控制中PI控制器参数直接影响系统控制性能好坏的问题,本文采用混沌蚁群算法优化直接转矩控制系统中PI控制器的参数。在蚁群初始化过程中进行混沌操作,改善个体质量,当搜索过程陷入局部最优时,可以利用混沌扰动跳出;兼顾蚁群算法的全局搜索能力和混沌算法的快速性,对PI参数进行寻优。仿真结果表明,将改进的控制策略进行PI参数优化后,可有效降低定子磁链脉动,提高系统动态响应能力。
永磁同步电机;直接转矩控制;混沌蚁群算法;PI控制器
永磁同步电机(PMSM)具有结构简单、体积小、高扭矩惯量比、动态响应速度快和高可靠性等优良性能,由于近年磁性材料成本不断下降,使基于永磁同步电机的变频驱动更具竞争力,已经广泛应用于各种工业产品中。
直接转矩控制(DTC)最早由TAKAHASHI Depenbroc提出,主要应用于感应电机的控制中[1]。由于矢量控制计算复杂度大,工业应用中大多采用直接转矩控制。电机在直接转矩控制下低速运行时,转矩和磁链脉动较大,需要进行控制。PI控制是一种经典的工业控制算法,其参数的优劣直接影响到系统的性能[2],参数的整定需要对系统有深刻的了解,反复进行调节。目前人工智能算法已经应用到PI参数的整定中,如粒子群、蚁群和遗传等智能优化算法。由于优化算法本身的局限,在运用中出现易陷入局部最优、计算复杂度大、收敛速度慢等问题,需加以改进。本文采用由混沌算法和蚁群算法结合的混沌蚁群优化算法(Chaotic Ants Swarm Optimization,CASO)对永磁同步电机直接转矩控制进行参数整定,并对蚁群算法与混沌蚁群算法的控制性能进行比较。
1 永磁同步电机DTC控制
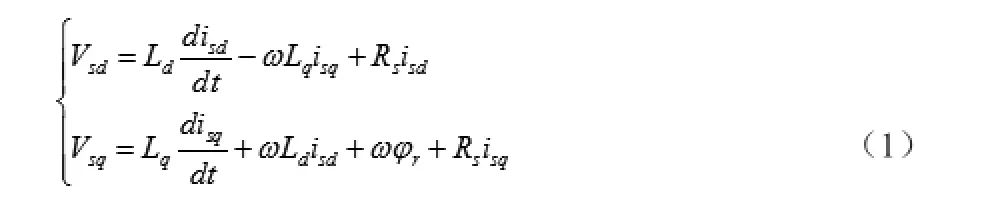
对永磁同步电机进行数学建模,忽略电机的铁心饱和、涡流及磁滞损耗,采用dq旋转坐标系对电机进行直接转矩控制[3-4],其中转子磁链的方向为d轴方向,定子磁链的方向为x轴方向,其电压方程为:
磁链方程为:

其中,Vsd、Vsq分别为d轴电压和q轴电压;Ld、Lq为d轴和q轴电感;φr为转子磁链;isd、isq分别为定子d轴电流和q轴电流;ω为转子电磁角速度;Rs为定子电枢电阻。
电磁转矩方程为:

机械平衡方程为:

其中,Tload、J、ωr分别为电动机的输入转矩、转动惯量系数和机械角速度;B为阻尼系数;P为电机的磁极对数。
永磁同步电机直接转矩控制通过电压矢量的合理选择提供定子电压矢量,逆变器输出8组电压矢量,包括六组非零电压矢量U7(100)、U2(110)、U3(010)、U4(011)、U5(001)、U6(101)和两组零电压矢量U0(000) 、U7(111),各非零电压矢量相位差为60°。如图(1)所示,将空间电压矢量平面分为θ1、θ2、θ3、θ4、θ5、θ6六个区间,在各个区间中选择相邻两个电压矢量控制定子磁链φs的大小。
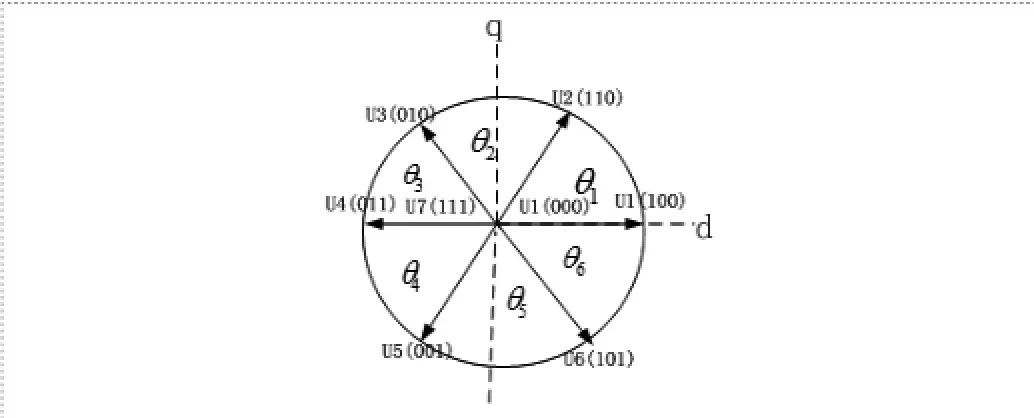
图1 空间电压矢量
根据PMSM简化模型可知,经过逆变器的供电电压为:

定子磁链定义为:

其中,Vs、is为电机的定子电压、电流。
电机转速不是非常低时,定子电阻的电压降落可以忽略不计,则:

采样间隔内,电机的电压矢量保持不变,则有:
空间电压矢量变换和式(2),可得电机电磁转矩输出为:


其中,δ为忽略定子电阻时,定子磁链和转子磁链之间的夹角。转矩角δ可以通过改变定子磁链矢量与PWM逆变器提供的实际电压矢量之间的位置控制。上述公式包含了两部分,第一项代表永磁体产生的励磁转矩,第二项代表磁阻转矩。
当d轴电感与q轴电感相等时,电磁转矩的表达式为:

由式(10)可知,当定子磁链幅值恒定时,可以通过改变转矩角控制电磁转矩输出。永磁同步电机直接转矩控制系统如图(2)所示,通过给定的速度值和测量的速度值经PI控制器得到给定值转矩,可知PI控制器参数的好坏对控制系统的性能影响很大。
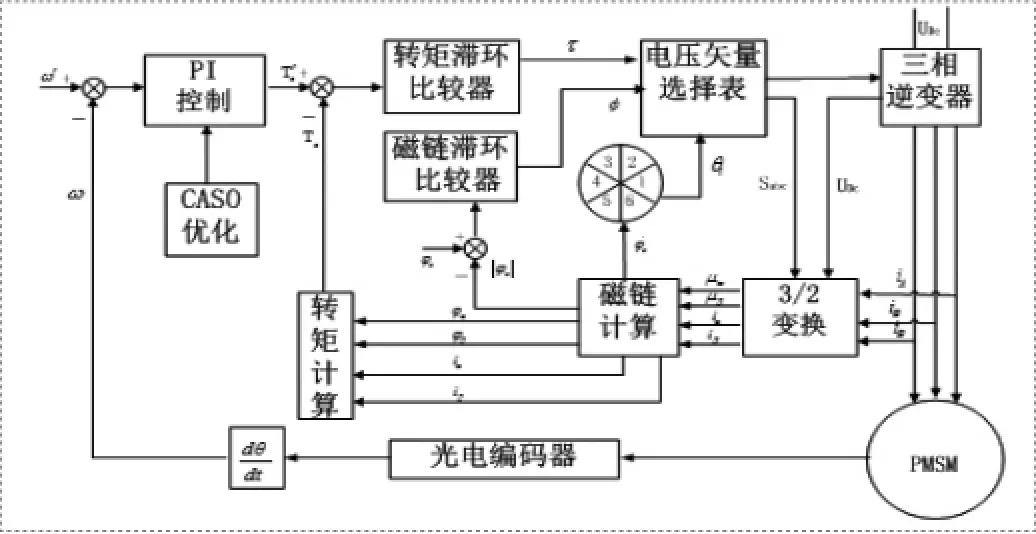
图2 永磁同步电机直接转矩控制系统
2 混沌蚁群优化控制
2.1 混沌蚁群优化算法
1997年,M. Dorigo根据蚂蚁的群体行为提出了AS(Ant System)优化算法,其在求解旅行商问题(TSP)等离散优化问题[5-7]上取得了较好的效果。从动力学方面来思考,结合混沌算法,可知将单个蚂蚁的混沌运动和整个蚁群的有组织规律性运动结合更能适应环境的变化。混沌蚁群优化算法(CASO)的方程如下:


混沌蚁群算法结合了混沌的随机性、规律性和遍历性及蚁群算法的全局搜索能力,在搜索过程中,组织变量yi(k)对蚁群的混沌运动产生影响,搜索早期,蚂蚁个体单独行动,个体之间的合作影响较小;搜索后期yi(k)对蚁群整体行为的影响不断增强,个体之间的合作越来越紧密,使系统搜索到稳定的最优解或者次优解。整个过程中,蚂蚁通过在邻居间保持信息交换,不断对搜索空间进行信息寻优。与蚁群算法相比,CASO提高了全局优化搜索能力,对控制系统的PI参数更具优势。
在对PI控制器参数寻优的过程中,混沌蚁群算法依靠搜索信息空间的方式调整PI控制器的参数[8],其搜索性能的好坏需要一个恰当的适应度函数进行判断。当混沌蚁群算法寻找到PI控制器的参数后,可由下面的函数评估性能优劣。
积分时间乘绝对值误差为:

目标函数取为:

2.2 优化控制流程
本文采用混沌蚁群算法对永磁同步电机直接转矩控制系统的PI控制器进行参数整定,其优化过程如下:
步骤1:将比例系数kp、积分系数ki作为各蚂蚁的位置向量的两个维度,并限定其上下边界;
步骤2:初始化操作,给参数a、b、Vi、ψd和ri赋初值,并确定群体数量的大小N和优化过程中的最大迭代次数K,对各蚂蚁的位置和组织变量yi(0)进行混沌初始化;
步骤3:计算每个蚂蚁的当前目标函数值F(xi),记录当前的最好结果;
步骤4:一轮计算结束后,对每只蚂蚁的当前最好结果按降序进行排序,得出当前群体最佳位置Pid;
步骤5:通过式(11)对每只蚂蚁的位置xi以及组织变量yi进行更新;
步骤6:若没有达到最大迭代次数,转至步骤(3)。
步骤7:输出结果。
3 仿真结果
本文通过Matlab/Simulink对系统进行仿真,设定混沌蚁群算法的主要参数:kp、ki的搜索区域为[0,3];设总体的大小N=30,a=200,yi(0) = 0.999,b = 0.5,Vi= 0,ψd= 3,组织因子ri=0.2+0.1×rand(rand为0到1之间的随机数),迭代次数k=30;目标函数中取λ=0.5。仿真中所用永磁同步电机参数如表(1)所示:
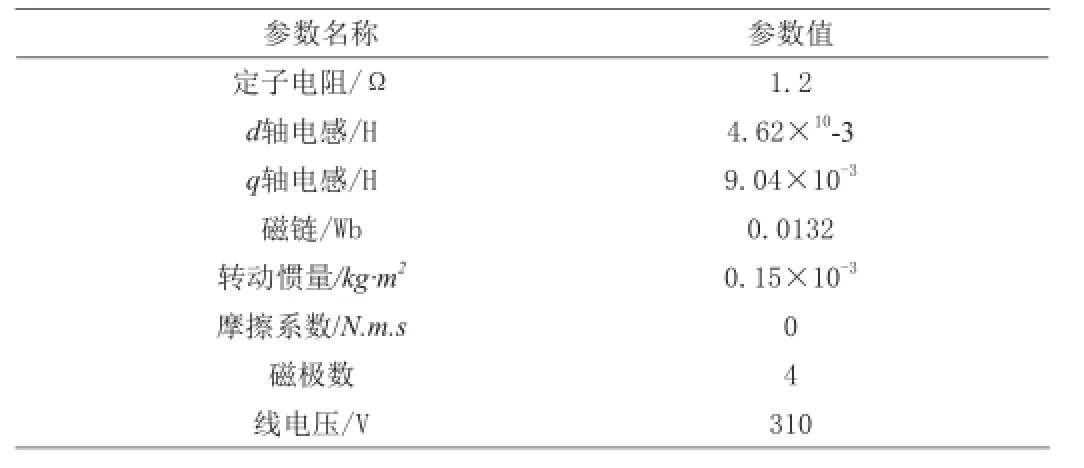
表1 永磁同步电机参数

图3 改进算法寻优效果
在相同的控制条件下对改进算法与蚁群算法进行性能仿真比较,包括:参数寻优能力、定子磁链轨迹及速度响应。参数寻优通过两种算法对适应度函数的收敛速度快慢,适应度值的大小进行判断;定子磁链轨迹通过磁链波动比较;速度响应根据转速的上升时间来判断,上升时间越短,则迭代次数越少,收敛速度越快,从而速度响应越快。
混沌蚁群算法通过混沌初始化改善个体质量,当搜索过程陷入局部最优时,可以利用混沌扰动跳出。图3中,改进的算法收敛速度快,在第10次迭代时就找到了比较好的结果,而蚁群则在第13次迭代时才找到较好的结果且寻优效果没有改进的算法好。图4中,采用混沌蚁群算法的控制器定子磁链的波动更小。图5为转速响应曲线,电机给定转速为1500r/min。从图中可以看出,采用混沌蚁群算法整定PI参数控制的电机具有更快的动态响应,达到稳态值所需时间更短,系统无超调;而蚁群优化整定的系统超调较严重。

图4 定子磁链轨迹

图5 速度响应曲线
4 结语
本文通过混沌蚁群算法对PI控制器参数整定进行优化,结合混沌的随机性和蚁群算法的群集性,与蚁群算法相比,避免陷入局部极值的危险,加快了收敛速度、增强了全局搜索能力,大大减小了电机定子磁链脉动,提高了系统的动态响应速度。
[1]徐惠明.永磁电机的发展[J].船电技术,2002,2:19-23.
[2]李浩,蒋雪峰,黄文新.基于遗传算法的永磁同步电动机PI参数自整定[J].微特电机,2015,01:58-61.
[3]田淳,胡育文.永磁同步电机直接转矩控制系统理论及控制方案的研究[J].电工技术学报,2002.17(1):7-11.
[4]M. Dorigo;L.M.Gambardella.Ant colony system: a cooperative learning approach to the traveling salesman problem[J].IEEE Transactions on Evolutionary Computation,1997,Vols.1:53-66.
[5]孙昌志,曲春雨,杨红敏等.混沌蚁群算法及其在电机设计中的应用[J].自动化技术与应用,2007,03:11-14+29.
[6]R.Senthil Rama,P.Latha.An Effective Torque Ripple Reduction for Permanent Magnet Synchronous Motor Using Ant Colony Optimization[J].International Journal of Fuzzy Systems,2015,17:577-584.
[7]La Wu Zhou,Shu Qi Shi.Direct Torque Control of PMSM Based on Variable Parameter PI and Fuzzy Control[J].Applied Mechanics and Materials,2012,Vols.130-134:2530-2534.
Optimal Control of PMSM Parameters based on Chaotic Ant Swarm
LI Chao-feng1WANG Zhi-chen2
(1.Taiyuan heavy industry technology center1,Taiyuan 030024,P.R. China;2.Hunan shiyou electric Co.,LTD2,Xiangtan 411101,P.R.China)
PI controller parameters directly affect the performance of permanent magnet synchronous motor(PMSM)system.Chaotic ant colony algorithm was proposed to optimize the PI controller parameters of direct torque control(DTC)system of PMSM. Taking chaotic dynamics of individual ant colony and the self-organization of the whole into account to ensure the algorithm fast and accurate.Simulation results show that the improved control strategy can effectively reduce the fluctuation of the motor torque and improve the dynamic performance of the system.
pmsm;direct torque control;chaotic ant swarm;pi controller
李超峰(1972—),男,太原重工技术中心工程师,研究方向:风力发电机组控制技术。
猜你喜欢
微电机(2022年8期)2022-10-12
电机与控制应用(2022年1期)2022-09-01
电机与控制应用(2022年4期)2022-06-27
防爆电机(2022年3期)2022-06-17
上海大中型电机(2021年2期)2021-07-21
微特电机(2021年6期)2021-06-22
防爆电机(2021年2期)2021-06-09
防爆电机(2020年6期)2020-12-14
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28