
海洋钻井平台动力鼠洞系统的研究
2016-03-08 05:13解文芳陈悦军王维国焦文凯方力平甘肃蓝科石化高新装备股份有限公司甘肃兰州730070
甘肃科技 2016年2期
解文芳,陈悦军,王维国,焦文凯,张 磊,张 铠,方力平(甘肃蓝科石化高新装备股份有限公司,甘肃兰州730070)
海洋钻井平台动力鼠洞系统的研究
解文芳,陈悦军,王维国,焦文凯,张磊,张铠,方力平
(甘肃蓝科石化高新装备股份有限公司,甘肃兰州730070)
摘要:动力鼠洞系统是海洋钻井平台钻杆自动化处理系统的关键设备,与自动猫道及铁钻工等钻杆处理设备配合使用,可起到离线接/卸立根的作用。该装置采用双液缸驱动的滑轮组提升系统,满足了不同长度钻杆的起升下放要求;鼠洞上端采用扶正装置,解决了不同管径钻杆的扶正定心问题;鼠洞下端缓冲装置有效地保护了钻杆端部的螺纹。该系统特别适合海洋钻井平台钻机用于与其他钻杆处理设备配合进行接/卸立根操作,结构简单,便于操作,有效提高了劳动效率,同时降低了作业风险。
关键词:动力鼠洞;钻杆自动化处理;离线接/卸立根;海洋钻井平台
1 背景及意义
传统钻进过程中,当钻井平台在指定位置开始钻井时,需要人工将甲板钻杆排放架上的钻杆水平移至猫道,钻台上的小绞车下放钢丝绳,利用索具等工具将钻杆沿坡道拉上钻台。然后,利用吊卡、旋扣工具、在鼠洞内将钻杆连接成立根,放入立根盒存储以备使用。在钻进过程中随着井深的增加,需要不断地将立根从立根盒移至井口连接到钻杆上;更换钻头或安装测试工具及其他钻杆底部工具时,又要不断地将立根从钻杆上取下移至立根盒或从立根盒将立根移至井口连接到钻杆上,即进行起、下钻操作。当钻完一口井后,又需要将立根从钻杆上逐根取下,利用小绞车挂住立根顶端将立根甩下,然后水平移至甲板的钻杆[1]排放架上。传统的操作方式需要工作人员与钻杆直接接触,在起、下钻过程中需要司钻、钻工、井架工等人的密切配合,稍有不慎便可能造成事故,且工作强度大,生产效率低。
钻杆自动化操作过程是指采用自动化钻杆操作系统代替人工来完成上述的钻杆操作过程。开始钻井时,甲板起重设备将水平放置在甲板钻杆排放架上的钻杆起升、并移送至钻杆传送设备上,经传送后至钻台入口处。然后,位于钻台入口处的水平/垂直钻杆转换系统将钻杆传送设备上的钻杆提起,并将其由水平状态转换至垂直状态,放入动力鼠洞或交给垂直钻杆操作系统进行单根接成立根操作。单根接成立根操作是由垂直钻杆操作系统、水平/垂直钻杆转换系统、动力鼠洞以及铁钻工配合完成的,然后由垂直钻杆操作系统将立根送入立根盒存储以备使用或直接送往井口。当钻完一口井准备移井位时,根据相关要求,可以由上述自动化钻杆操作设备按反向程序,将立根送回至甲板排放架上,至此,完成了整个钻杆的自动化操作循环过程。在自动化钻杆操作系统中,动力鼠洞系统是其中不可或缺的关键设备,是整个系统的重要一环。
在自动化钻杆操作系统中,动力鼠洞系统是其中不可或缺的关键设备,是整个系统的重要一环。动力鼠洞系统与水平/垂直钻杆转换系统、铁钻工配合具备离线单根接/卸立根的功能,可以在钻井作业的同时进行接立根操作,可大幅度提高钻井工作效率。在动力鼠洞工作过程中,须频繁使用动力鼠洞的扶正及升降功能,以便与铁钻工配合完成单根接/卸立根工作。动力鼠洞系统的优劣,直接决定了整个自动化钻杆操作系统的效率,也就决定了钻进工作的效率。鉴于目前这种情况,研制开发的带有扶正装置的滑轮式动力鼠洞系统,解决了当前钻井平台的自动化钻杆操作系统中动力鼠洞在生产作业当中,频繁接/卸立根的难题,极大地提高了自动化钻杆操作系统处理钻杆的效率。
2 主要结构及工作原理
该海洋钻井平台动力鼠洞系统包括动力鼠洞机械部分[2]和自动化控制[3]部分,其中控制部分是通过智能仪表对动力鼠洞的现场数据进行检测,并通过总线将信号传送至可编程序处理器(PLC)上,PLC按照事先编好的程序对数据进行处理和运算,最后由输出控制信号来控制动力鼠洞的动作过程;本文主要介绍机械部分的组成及工作原理。
2.1主要结构组成
如图1~图5所示,图中:1—上部圆管;2—连接法兰;3—喇叭口;4—扶正装置;5—定滑轮装置;6—下部圆管;7—升降液缸;8—钢丝绳9—提升导向装置;10—移动缓冲装置;11—排污管12—导向滚轮;13—导向槽;14—锥形头;15—蝶形弹簧;16—耳环;17—下部圆管法兰盘;18—上扶正板;19—固定轴;20—旋转轴;21—导向轴套22—导向轴;23—往复齿条;24—液缸;25—回转支承内圈;26—回转支承外圈;27—回转支承;28—下扶正板;29—上部圆管法兰盘。
该动力鼠洞系统的主体结构分为上部圆管(1)和下部圆管(6),上部圆管(1)通过与其焊接的连接法兰(2)与钻台面主结构联结[4],上下两部分圆管通过中间夹持扶正装置(4)相连接。扶正装置(4)夹持安装在与上部圆管(1)与下部圆管(6)之间,当液缸(24)活塞杆伸缩带动往复齿条(23)做伸缩往复运动时,往复齿条(23)驱动回转支承外圈(26)转动,安装于回转支承(27)上的上、下扶正板(8)、(18)旋转轴(20)随回转支承外圈(26)(回转圈)沿安装于回转支承内圈(25)(固定圈)上的固定轴(19)做向心转动,带动扶正板做向心回转收缩运动,同步将动力鼠洞圆管中的钻杆向圆管中心回转收缩,可使钻杆准确快速对准圆管中心,并便于安装维护扶正装置(4)。
下部圆管(6)上安装有两个升降液缸(7)、定滑轮装置(5)、提升导向装置(9)。定滑轮装置(5)包括两组四个定滑轮,两组定滑轮对称固定在下部圆管(6)上,两个升降液缸(7)也对称固定在下部圆管(6)上,在平面投影上与定滑轮组成垂直交叉布置。提升导向装置(9)的两组四个动滑轮则对称固定在提升导向装置上,与两组四个定滑轮相对应;两个升降液缸(7)活塞分别与提升导向装置(9)两侧连接,活塞伸缩带动提升导向装置沿下部圆管(6)上导向槽(13)外侧上下移动;钢丝绳(8)一端固定,另一端通过定滑轮组进入下部圆管(6)导向槽(13)内侧与移动缓冲装置(10)上的耳环(16)连接。升降液缸(7)活塞伸出,移动缓冲装置(10)随即上升,即可带动圆管内钻杆升起。

图1 动力鼠洞系统主视图

图2 提升导向装置剖视图

图3 移动缓冲装置示意图
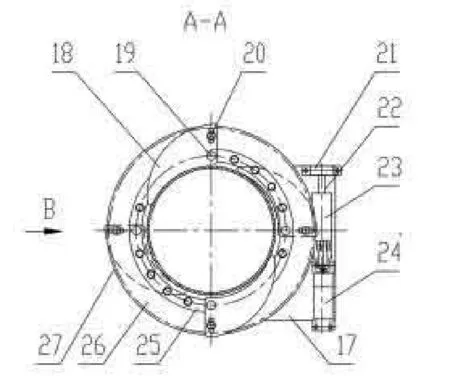
图4 扶正装置示意图

图5 扶正装置中上下扶正板结构图
2.2工作原理
该动力鼠洞系统主要包括扶正装置,滑轮组,圆管,两个液压升降油缸,提升导向装置和移动缓冲装置等部分。钻杆自动化处理系统[5-6]的主要工序为:甲板起重设备将水平放置在甲板钻杆排放架上的钻杆起升、并移送至钻杆传送设备上,传送至钻台入口处。然后,位于钻台入口处的水平/垂直钻杆转换系统将钻杆传送设备上的钻杆提起,并将其由水平状态转换至垂直状态,在第一个鼠洞中放入第一根钻杆。此时移动缓冲装置中的弹簧起缓冲作用,防止放下钻杆时的冲击过大,而锥形头内的橡胶垫可以保护钻杆接头。同时,锥形头可以起到一定的定心的作用,从而可以保证钻杆比较平稳的放在移动缓冲装置上。然后液压升降油缸的活塞缩回,带动动滑轮组向上移动,此时移动缓冲装置向下移动,当到达合适高度时,液压升降油缸的活塞停止回缩。同样方式往第二鼠洞中放入第二根钻杆,并移动到合适高度。水平/垂直钻杆转换系统把第三根钻杆移送至第二个动力鼠洞上方,升降液缸活塞伸出,举升钻杆到适当位置,液压扶正装置工作,液缸(24)活塞杆带动往复齿条(23)做伸缩往复运动,往复齿条(23)驱动回转支承外圈(26)做回转运动,安装于回转支承(27)上的上、下扶正板(18)、(28)随回转支承外圈(回转圈)(26)上的旋转轴(20)绕回转支承内圈(固定圈)(25)上固定轴(19)做向心转动,扶正板可同步向圆管中心回转收缩,保证钻杆定心准确,通过铁钻工与第二根钻杆连接组成双根。然后水平/垂直钻杆转换系统把接好的双根移运至第一个动力鼠洞上方,移动缓冲装置向上移动,举升钻杆到适当位置,液压扶正装置工作,保证钻杆定心准确,用铁钻工与已接好的双根接成立根。至此完成了整个接立根操作。反之亦然。
3 结论
1)该动力鼠洞系统既能满足海洋钻井平台的钻杆自动化操作中离线接/卸立根的特殊要求,又具有结构简单、性能可靠并且自动化程度较高优点。本结构已经取得实用新型专利(专利号:2013204392099)。
2)该动力鼠洞系统中的两个升降液缸与滑轮组在平面投影上成垂直交叉布置,有效解决了钢丝绳与升降油缸产生的干涉问题,同时使得圆管受力更为均衡。
3)扶正装置采用齿条驱动回转支承及其扶正板,设计新颖独特,适合钻杆管径范围大。同时因为安装位置的巧妙设计,方便操作与维修。
参考文献:
[1] API SPE5CT-2011套管和油管规范第9版[M].兵器工业出版社,2011.
[2]成大先.机械设计手册[N].第四版第2卷;化学工业出版社,2007.
[3]程晓梅.石油钻机井口机械化装置的运动控制模拟研究[J].中国石油大学(华东),2007.4.
[4]解文芳,陈悦军.动力鼠洞平台板受力性能有限元分析[J].甘肃科技.2014,30(8):49-51.
[5]董磊.钻井平台钻杆自动控制系统研究[D].中国石油大学(华东):2009.4.
[6]张先余.自动化钻机二层台钻杆排放技术的研究[D].中国石油大学硕士论文,2012,5.
中图分类号:TE951
