基于语音的移动机器人车体控制系统设计
2016-03-02 06:33:22房爱青李长勇马双峰
现代制造技术与装备 2016年7期
房爱青 李长勇 江 宏 马双峰
(新疆大学 机械工程学院,乌鲁木齐 830047)
基于语音的移动机器人车体控制系统设计
房爱青 李长勇 江 宏 马双峰
(新疆大学 机械工程学院,乌鲁木齐 830047)
考虑到现有移动机器人车体控制方式的优缺点以及发展前景,基于语音的移动机器人车体的控制系统进行了研究设计。通过搭建的移动机器人硬件平台和基于语言识别系统软件的实地测试,可以很好地完成通过语音控制移动机器人车体,具有很好的稳定性和快速响应性。
语音 机器人 车体运动 控制 全向轮
引言
随着我国逐步进入人口老龄化阶段,社会护理压力逐步加大,对家庭服务机器人的研究已经成为刻不容缓的任务。本文提出了一种新的移动机器人控制系统,采用STM32微处理器为核心控制器,对移动机器人轮式结构进行优化,搭建移动机器人硬件平台,并通过对HTK语音识别控制系统进行研究设计。通过对HTK语音识别的研究,对语音识别系统进行设计开发。通过系统软件的实地测试,可以很好地完成通过语音控制移动机器人车体,具有很好的稳定性和快速响应性。
1 移动机器人硬件结构
1.1 移动机器人车体运动结构
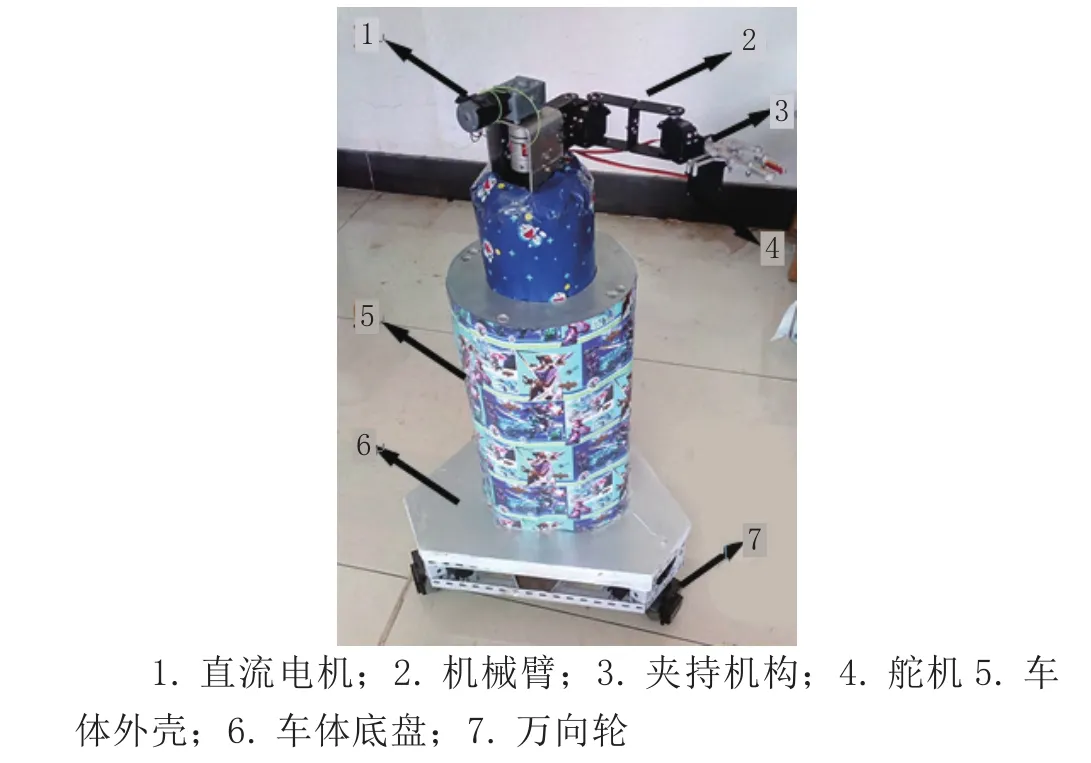
图1 移动机器人车体整体结构
运动机构是移动机器人的重要组成部分。常见的运动方式有腿式移动机器人、轮式移动机器人和履带式移动机器人等,其中轮式运动机构在平坦的环境中具有好的适应性、稳定性以及速度响应,适合室内运行[1]。鉴于此,最终选择适应性、稳定性以及速度响应较好的轮式移动机器人车体作为为控制对象,如图1所示。
1.2 移动机器人硬件控制
移动机器人硬件主要由核心控制器模块、通讯模块、驱动模块、传感器电路模块等模块组成。主要工作流程:使用者通过人机交互语音识别系统录取使用者的语音,将语音识别的内容写入文本,上位机软件通过蓝牙串口模块将语音识别的语意转换成相应的指令发送给下位机的核心控制器,下位机核心控制器根据预先编制的控制策略流程完成指定功能。
2 语音遥控系统设计
2.1 语音识别原理
语音识别,其实是一个模式匹配的过程。首先,话筒将采集到的语音信号变成电信号,经过模数转换后将信号传送到识别系统,识别系统对语音信号经过预处理后,对其进行特征提取,然后将提取到的特征参数与模板库的各模板进行比较,找出相似度最大的参考模板,然后将其作为识别结果输出。
在HMM模型训练过程中,经常遇到对任何一组观察序列要想调整模型参数Λ={π,A, B},使P{ O| Λ}最大的问题。这时,需要进行公式迭代:
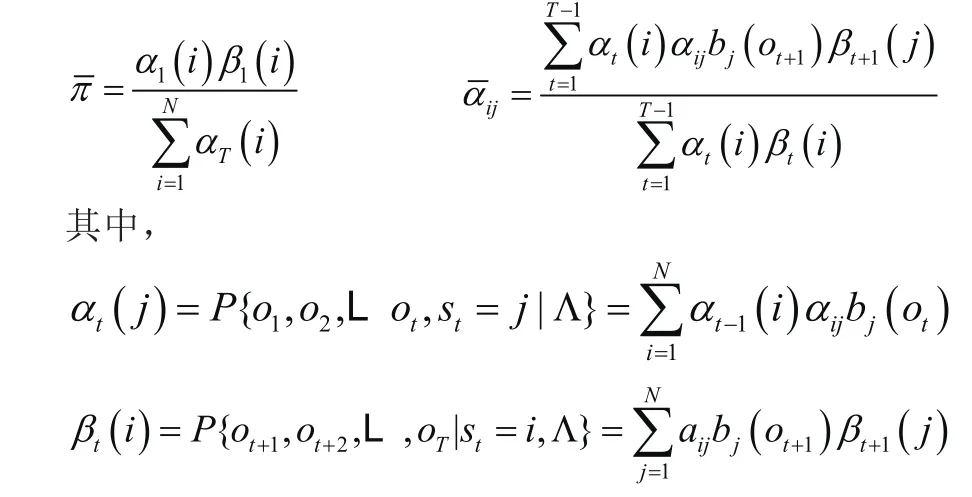
在使用过程中,HMM模型需要利用Viterbi解码算法来进行状态序列{s1, s2,L,sT}的选择。

2.2 语音识别系统的搭建
根据HTK语音识别识别原理,语音识别系统的搭建过程一般分为四步:数据准备阶段、模型训练阶段、识别阶段和识别结果分析四个阶段。
数据准备阶段又包括语料准备、语音标注、字典和语法的创建等主要工作[1-4]。
(1)语料准备。由于时间精力有限,本文所选准备语料均是本人在安静环境下录制,录制了前、后、左、右、停语音各10组。
(2)语音标注。在声学模型训练前,需要对语音波形文件进行标注。将语音信号中静音部分和语音指令部分区分出来。
(3)语法定义。语法定义是以计算机形式语言理论为基础,按照特定的文法结构进行约束语音发音词汇而成。内容如下:$WORD=QIAN|HOU|ZUO|YOU|TING;({START_SIL} [$WORD]{END_SIL})。其中,$WORD表示需识别的词汇,START_SIL、END_SIL分别表示说话人说话前、后的静音部分。
(4)字典定义。本设计所定义的字典内容如下:QIAN[qian]qian、YOU[you]you、HOU[hou]hou、TING[ting]ting、ZUO[zuo]zuo、START_SIL[sil]sil、END_SIL[sil]sil。
通过已训练好的隐马尔可夫模型,按照识别概率的大小,输出相应模型所表示的语句。识别完后,可以对识别结果进行分析。依据基于数理统计理论的算法,通过将识别测试文件与先前已完成的HMM模型标注文件进行配对分析比较,最终得出相应各个级别的识别率。通过实验发现,HTK单字识别率达98%。
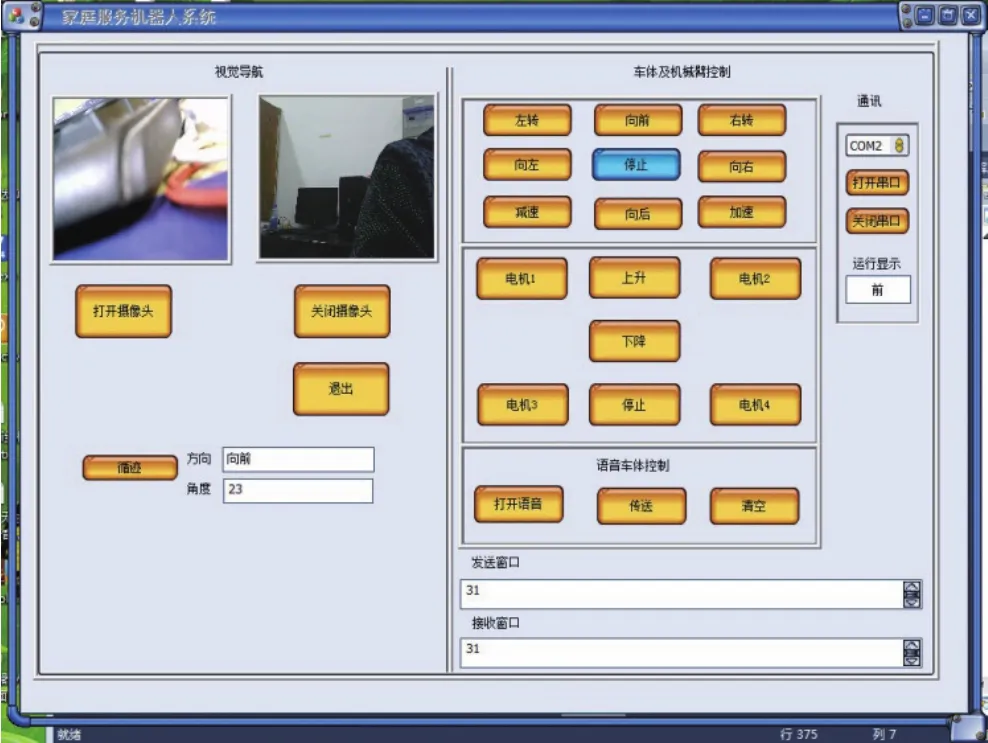
图2 人机界面
2.3 人机交互界面设计
由于HTK在WINDOWS操作系统中只能在DOS环境下以命令形式运行,命令长而复杂容易,大大增加了使用者的负担。因此,本设计编写了如图2所示的人机交互界面。通过该移动机器人系统软件,使用者可以使用手动控制移动机器人。更为重要的是,使用者完全可以通过语音控制车体在各个方向的运动状态,无需进行按钮控制。
3 结论
根据移动机器人功能设计,搭建移动机器人硬件平台,同时基于C++对语音识别系统进行设计开发。实践证明,通过搭建的移动机器人硬件平台和基于语言识别系统软件的实地测试,可以很好地完成通过语音控制移动机器人车体,具有很好的稳定性和快速响应性。
[1]陈旭东.老人服务机器人的移动机构运动控制系统研究[D].合肥:中国科学技术大学,2011.
[2]杨柳青.数字化电机调速平台的网络通信及数据分析系统的研制[D].上海:上海交通大学,2008.
[3]王君君.锂离子动力电池管理系统的设计与实现[D].哈尔滨:哈尔滨工业大学,2010.
[4]张振,陈宏铭,程玉华.非侵入式脉搏血氧检测系统设计[J].中国集成电路,2013,(5):15-20.
Based on the Voice of the Mobile Robot Body Control System Design
FANG Aiqing,LI Changyong,JIANG Hong,MA Shuangfeng
(School of Mechanical Engineering, Xinjiang University, Xinjiang Urumqi 830047, China)
Considering the advantages and disadvantages of existing mobile robot car body control mode as well as the prospects for development, is based on the voice of the car body control system of mobile robot is studied. Through the hardware platform of mobile robot based on speech recognition and field testing of the system software, can very good finish by voice control mobile robot body, has the very good stability and fast response.
Voice,robot,Vehicle,Control,Omni-directional Wheel
大学生创新训练项目(201410755036)。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 01:59:12
制造技术与机床(2017年3期)2017-06-23 08:11:21
海外华文教育(2016年1期)2017-01-20 08:21:58
电力系统及其自动化学报(2016年5期)2016-12-01 03:13:00
当代教育理论与实践(2015年9期)2015-12-16 16:26:05
焊接(2015年1期)2015-07-18 11:07:33
焊接(2015年1期)2015-07-18 11:07:33
民族古籍研究(2014年0期)2014-10-27 08:24:34
外语教学理论与实践(2014年2期)2014-06-21 08:34:20
机械制造与自动化(2014年1期)2014-03-01 04:21:44