改进的灰度预测在列车轮径校正中的研究
2016-03-02 03:33张亚东
铁道标准设计 2016年1期
关键词:轨道交通
崔 超,张亚东,郭 进
(西南交通大学信息科学与技术学院,成都 611756)
改进的灰度预测在列车轮径校正中的研究
崔超,张亚东,郭进
(西南交通大学信息科学与技术学院,成都611756)
摘要:列车测速定位是列控系统中的三大关键技术之一,精确的列车定位将会提高列车运行控制的安全性,缩短列车追踪间隔和提高行车效率。针对目前地铁中主流的脉冲速度传感器和应答器的组合定位技术中存在的轮径损耗问题,提出将改进的灰度预测算法应用于轮径校正中。根据列车通过定位应答器推算出的前面若干组列车轮径值,滚动预测列车下一走行区间定位计算中的轮径值,以此提高列车的定位精度,具有一定的实践意义。
关键词:轨道交通;列车定位;轮径损耗;滚动预测

随着我国城市轨道交通的快速发展,素有“轨道交通中枢神经”的列车运行控制系统正发挥着越来越重要的作用。列车定位是列控系统的三大关键技术之一,精确的列车定位将有效地提高行车效率和安全性[1]。
目前在城市地铁中,通常采用里程计和应答器组合定位方式[2]。里程计计算列车的累计走行距离,但由于列车轮径磨损及空转和打滑等因素的影响,使得列车存在定位误差,且该误差随列车走行会不断累积。虽采用密集布置应答器的方式可以使得列车的定位精度有效提高,但同时也带来建设成本的提高。因此需要采用合适的处理算法来减小轮径磨损以及补偿空转和打滑的影响[3]。
传统的列车定位技术仅依靠轨旁设备来完成列车的辅助定位,增加了系统的维护成本同时也不利于线路配置的更新。将智能算法应用于列车定位中,减小对轨旁设备的依赖并进行精确的列车定位将是未来列控技术的发展趋势。灰度预测智能算法可以借助少量的数据,通过小样本进行预测建模,对未来的发展趋势做科学定量的预测[4]。
本文研究的即是将灰度预测智能算法应用于列车定位中。针对传统的轮径校正中存在的定位误差问题,利用滚动预测进行轮径损耗校正,以此提高列车的定位精度,具有较广的实践意义。
1列车定位技术及发展
IEEE1474标准中将CBTC列控系统定义为“不依赖轨道电路的高精度列车定位,具有连续、大容量、双向的车地通信技术,车载和轨旁设备发挥着关键作用”,足见精确列车定位技术的重要性。列车定位技术深深影响着闭塞制式的发展,在发展初期,采用轨道电路进行列车占用检查,由于定位的精度为轨道区段,因此采用的闭塞方式为固定闭塞。随着列车定位精度的提高,列车借助先进的车地通信技术将位置信息发送给地面控制中心(ZC),后车可以直接追踪到安全列车尾部,使得采用移动闭塞成为可能,有效地缩短了追踪间隔,提高了行车效率。
在列控技术发展过程中,诸多专家学者和技术人员在列车定位技术方面进行了研究,提出了各具特色的列车定位技术。表1总结了常用的列车定位技术以及各自的优缺点[5]。
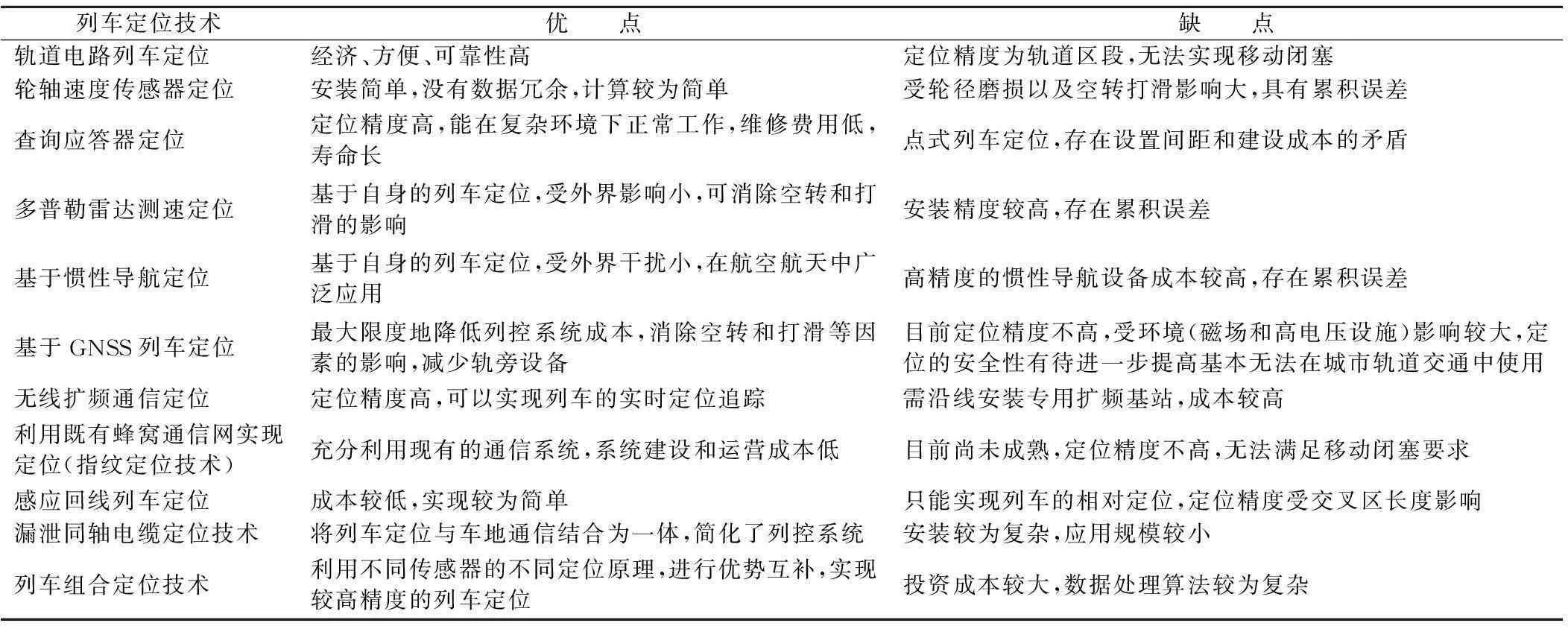
表1 列车定位技术优缺点对比
2城市轨道交通中的列车定位研究
城市轨道交通中,不同信号设备供应商的列车定位技术存在差异,但广泛采用的是脉冲速度传感器 (里程计)和查询应答器并结合加速度计定位技术来消除空转和打滑的组合定位方式[6]。
2.1 基于轮轴速度脉冲传感器的列车定位
该方式是利用安装于轮轴两侧的传感器,当传感器检测到车轮转动时会产生一定比例的脉冲序列,据此可以求得列车的运行速度[7]。由于列车在线路上运行是一维的,因此根据列车的累积走行距离,可确定列车的具体位置。
(1)
式中D——列车车轮直径,m;
nk——k周期的脉冲总数,个;
n——车轮转动一周输出的脉冲数,个;
lk——k周期列车里程计算值,m。
2.2 脉冲速度传感器定位中的误差
采用脉冲速度传感器进行列车定位,不会增加数据处理和额外通信的负担,但是在列车行进过程中,存在空转滑行和轮径磨损两方面的误差。
空转和滑行主要发生于列车启动和制动的过程中。列车启动过程中,若施加的牵引力急剧增大,远大于黏着力时会发生空转现象。反之列车制动时,若施加的制动力过大,黏着力小于制动力,列车发生打滑[8]。
另一方面,列车在行进过程中车轮会不断磨损,根据公式(1)计算时,轮径值的变化也会产生定位误差,列车轮径损耗造成的定位误差如图1所示。
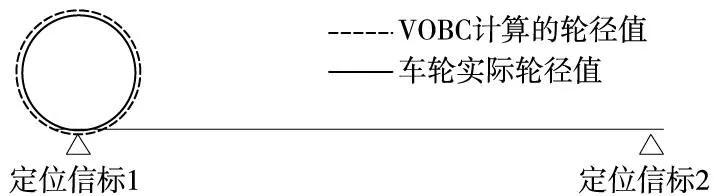
图1 列车轮径损耗产生定位误差
因此列车定位的实际测量值可以由下式表示

(2)

2.3 误差校正
针对上述测速传感器定位中的两类误差,由于两种误差产生的原因有本质的区别,故需要分别进行校正。
2.3.1空转和滑行校正
为减小空转和滑行对列车定位精度的影响,可采用插值法或组合其他定位技术进行补偿[10]。以成都地铁1号线为例,利用的是加速度计对空转和滑行进行检测补偿。
加速度传感器是一种可测量加速度力的电子设备,一般的加速度传感器是根据压电效应实现的,加速度传感器利用其内部由于加速度造成的晶体形变而产生电压,电压与所施加的加速度之间存在有对应关系,根据测量的电压值即可求得列车的加速度。电压值u与加速度a之间可用式(3)来表示。其中φ为二者之间的系数。
(3)
由于加速度传感器的测量值不受空转和滑行的影响,故可以作为辅助定位技术对列车的空转和滑行进行补偿。
车载计算机实时对脉冲速度传感器和加速度计的输入数据进行一致性检测,如利用速度比较法来进行检测。当两种测速传感器测得的速度差值超过了某个设定的阈值则判定为发生空转和滑行[11]。


(4)
式中vc(k)——根据加速度求得的第k个周期列车速度;
a(k)——第k个周期加速度传感器采集的加速度;
v(k-1)——第k-1个周期脉冲速度传感器测得的列车速度;
v(k)——第k个周期脉冲速度传感器测得的列车速度;
vs——判断空转和滑行现象设置的速度差值阈值。
在列车正常运行的情况下,以脉冲速度传感器的测量值为准;当检测到空转和打滑时,车载计算机会根据加速度计的实际加速度或减速度推算的速度值作为列车现有速度进行计算。
2.3.2轮径损耗校正
针对列车行进过程中车轮直径不断减小,传统的轮径磨损校正是列车通过一个定位信标时,利用车载设备计算的两个定位信标之间的距离S1和线路数据库中两个定位信标之间实际距离SB,可以求得车轮的校正参数ψ。也可根据式(1)将定位信标间的实际距离作为准确值反推列车在前一走行区间的轮径值D。
(5)
式中D——车载设备处理中的当前列车轮径值;
RA——列车轮径实际值。
为提高里程计的定位精度,需先对列车的空转滑行进行检测补偿,之后对轮径进行磨损校正。本文研究的是列车已经过空转和滑行补偿后的轮径磨损校正。校正过程如图2所示。
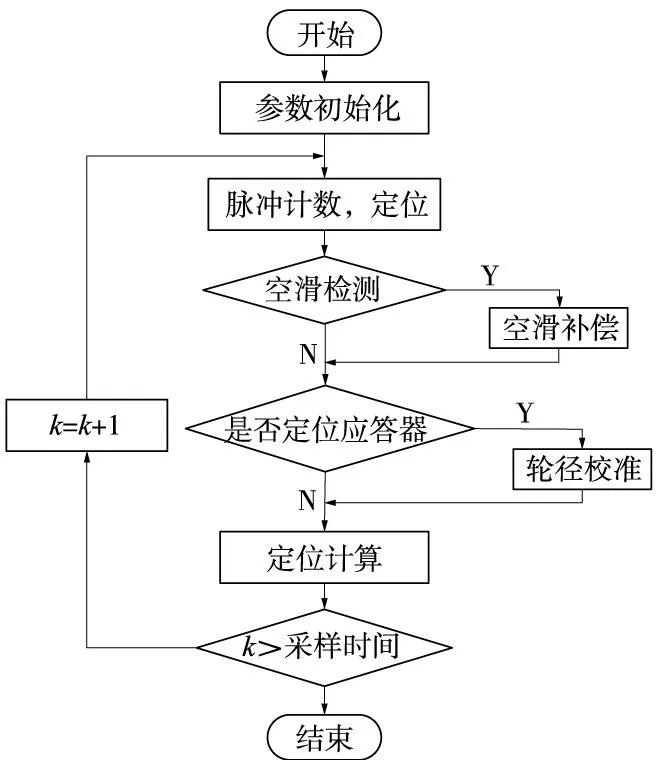
图2 里程计定位校正过程
3灰度预测
传统的轮径校正是列车通过定位信标时,利用式(1)反推列车的轮径[12],但该轮径实为对应于列车已通过的前一区段中的轮径校正值,故将此值用于计算下一运行区间的列车位置是存在偏差的。针对该问题,本文利用前面若干组根据定位信标数据解算的轮径值,进行列车下一走行区间轮径值预测。每当列车通过一次定位信标时,则反推上一走行区间的列车轮径值,同时将原始值序列更新,进行新一轮的轮径预测,以此循环进行,图3为列车通过定位应答器时轮径预测的示意。
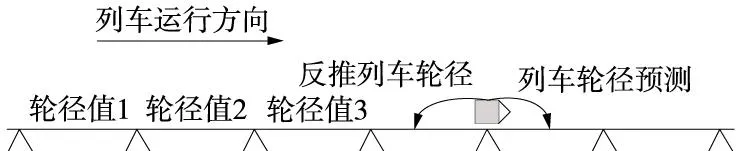
图3 轮径预测示意
目前常用的预测算法有BP神经网络、灰度预测以及统计回归模型等。本文中轮径预测是列车通过定位信标的瞬间计算完成的,因此对于算法的计算速度有一定的要求。神经网络预测的最大弊端是计算速度慢,对于原始数据量要求大;统计回归模型则需要找到一个线性或者非线性的函数来拟合原始序列的变化过程,这个难以实现;灰色预测模型GM(1,1)具有运算简便、原始数据少等优点被广泛应用于单调趋势预测,该模型适用于原始序列具有单调变化的情形,列车轮径随列车运行会不断磨损呈单调减小的趋势变化,因此采用该模型进行轮径值预测符合模型特性要求。
3.1 灰度预测原理
灰色预测模型中,通常的模型为GM(1,1),即一元一阶预测模型。其设计思路如下。
首先构建原始序列:
X(0)=(x(0)(1),x(0)(2),x(0)(3),…,x(0)(n))
X(1)为X(0)的一次累加序列,


Z(1)为X(1)的紧邻均值生成序列,


根据GM(1,1)建立的灰微分方程为:

其中,a为发展系数;b为灰色作业量。
上述微分方程的时间响应序列为


还原值为

根据上述还原值,可以计算逐点的绝对残差、相对残差以及模型的平均残差值来表明预测模型的准确性。
绝对残差为

相对残差为
平均残差为
3.2 改进的灰色预测
在灰色预测模型中,a反映了原始序列和一次累加序列的发展态势,b反映了数据间的变化关系。a和b的准确性直接影响着模型预测的精度。在列车行进中,灰色预测模型会受到一些随机因素的影响。为提高模型的预测精度,可以将a和b作为时间的函数,每预测一次就解算一次a和b的值,利用滚动预测实现列车轮径动态校正。
假设x(0)(n+1)为新加入的原始序列信息,则将其置入x(0)中,同时去掉原信息中的x(0)(1),得到新的预测模型。这样不断随着新信息的加入和旧信息的去除,模型中的a和b可以不断在线校正,提高了模型的精度同时也减小了数据的累积对系统内存的消耗。新陈代谢的过程可以等效为一个窗口的不断向前移动。滚动预测的精度和窗口的长度有关,图4为窗口长度为4的滚动预测示意。
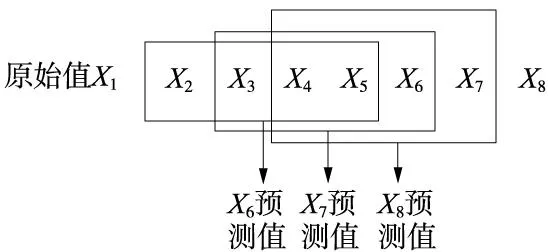
图4 窗口长度为4的滚动预测
根据文献[9]中的实验列车轮径的数据来源,使用MATLAB预测程序,对比一次预测和滚动预测结果如表2所示。

表2 一次预测和滚动预测对比
其中滚动预测的5组数据平均残差为

0.164 5%
一次预测的平均残差

0.718 4%
根据上述结果,可以看出滚动预测较一次预测的精度有所提高,表明该算法较为有效。
4仿真设计
由于获取现场数据较为困难,本文采用仿真方式来验证模型。城市地铁中轮径的初始值一般为840 mm,当列车运行一定的里程后轮径值磨损到770 mm,该轮径将无法继续使用[13]。仿真设计中假设列车已经运行一段时间,取列车的轮径初始值为799.542 1 mm。
在仿真程序中,以列车通过应答器推算出的列车轮径值为列车的真实值,对应于表2中的列车轮径模拟值,该值是根据公式(1)出的列车轮径值,程序中在nk中加入了一个rand()函数生成的随机数,使得结果更加合理。在求得一个列车模拟值的基础上,利用灰度预测算法求得下一区间的轮径值,循环测试100组结果,并求得每组数据的相对残差。仿真结果如图5所示,结果表明采用滚动预测,每一次预测后的轮径值与实际的轮径值的相对残差不超过0.13%,故表明该预测算法是有效的。
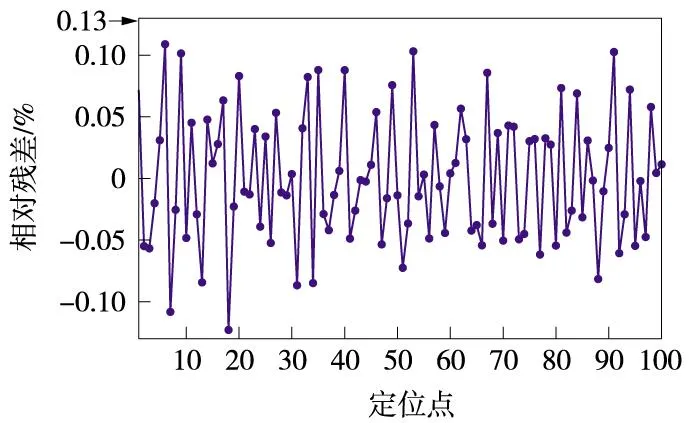
图5 仿真结果
5结论与分析
本文主要是对目前城市地铁中的脉冲速度传感器和定位应答器组合定位中的轮径校正进行分析,根据脉冲速度传感器的定位过程中的空转、滑行以及轮径损耗的两类误差,采用分别校正的方式。所讨论的是列车在进行空转和滑行补偿后进行的轮径损耗校正,针对传统的轮径校正是将列车上一走行区间的轮径值用于下一个运行区间的定位计算的问题,提出利用滚动预测算法来进行轮径值校正。根据文献中的数据及仿真数据结果,表明该算法的轮径校正值达到了较高的精度,具有一定的研究价值。本文的不足之处在于并未讨论滚动预测的窗口的长度为多少时预测精度是最高的,这也是下一步需要研究的问题。
参考文献:
[1]夏青.应答器与测速组合定位在地铁中的应用[J].铁路通信信号工程技术,2012(2):50-53.
[2]段亚鸣.城市轨道交通列车定位设备[J].交通世界,2015(9):50-52.
[3]王灵丽.基于CBTC的地铁列车组合定位技术研究[D].成都:西南交通大学, 2014.
[4]刘思峰,党耀国,方志耕.灰色系统理论及其应用[M].3版.北京:科学出版社,2004.
[5]刘锋.基于通信的列车控制模式下的列车定位新技术[J].城市轨道交通研究,2012(4):48-53.
[6]乔超,唐慧佳.列车里程计定位方法的研究[J].兰州交通大学学报:自然科学版,2003,22(3):116-119.
[7]蔡煊,王长林,林颖.基于多传感器的列车空转及滑行检测与校正方法研究[J].城市轨道交通研究,2015(1):22-27.
[8]林颖,王长林.车载列车自动防护系统对空转及滑行的检测与校正方法研究[J].城市轨道交通研究,2011(3):28-36.
[9]刘江,蔡伯根,王剑,唐涛.基于灰色理论的列车组合定位轮径校准方法研究[J].铁道学报,2011(5):54-59.
[10]刘霞,邓小军.高速列车测速定位系统误差分析及补偿方案[J].机车车辆工艺,2015(2):1-4.
[11]李卫娟,徐烨.城市轨道交通列车打滑对CBTC信号系统的影响[J].2015(4):24-26.
[12]赵磊,张小林.列车测速定位的仿真误差研究[J].城市轨道交通研究,2014(3):35-41.
[13]曾全君.地铁车辆车轮寿命分析[J].电力机车与城轨车辆,2005(2):47-49.
Research on Train Wheel Diameter Calibration with Improved Gray Prediction
CUI Chao, ZHANG Ya-dong, GUO Jin
(School of Information Science and Technology, Southwest Jiaotong University, Chengdu 611756, China)
Abstract:Train velocity measurement and positioning is one of the three key technologies in train control system, and precise train positioning will improve the safety of train operation, shorten inter-train tracking interval and raise traffic efficiency. To address wheel diameter loss resulted from the combination positioning by means of the mainstream technology of pulse speed sensor and balise in subway, the paper proposes a wheel diameter correction method using improved gray prediction algorithm. Wheel diameters in the next train traveling section are predicted in rolling according to some sets of wheel diameters when the train passes the positioning balise such that the train positioning accuracy is improved practically.
Key words:Railway traffic; Train positioning; Wheel diameter loss; Rolling prediction
作者简介:崔超(1991—),男,硕士研究生,E-mail:1280365949@qq.com。
基金项目:中国铁路总公司科研计划重大课题(2014X008-A);中央高校基本科研业务费专项基金资助(2682014BR059)
收稿日期:2015-05-11; 修回日期:2015-06-12
中图分类号:U231
文献标识码:ADOI:10.13238/j.issn.1004-2954.2016.01.031
文章编号:1004-2954(2016)01-0139-05
猜你喜欢
机械工业标准化与质量(2022年3期)2022-08-12
城市轨道交通研究(2022年4期)2022-04-16
城市轨道交通研究(2022年1期)2022-02-18
上海涂料(2021年5期)2022-01-15
装备制造技术(2020年3期)2020-12-25
铁道通信信号(2019年8期)2019-10-10
铁道通信信号(2019年7期)2019-10-08
铁道通信信号(2018年11期)2019-01-19
铁道通信信号(2018年6期)2018-08-29
消费导刊(2018年10期)2018-08-20