捷联寻的弹药惯性视线重构及制导系统设计*
2016-03-02 06:24金国强马清华赵阳阳
弹箭与制导学报 2016年5期
金国强,马清华,王 萧,赵阳阳,王 龙
(1 清华大学自动化系,北京 100084;2 中国兵器工业第203研究所,西安 710065)
捷联寻的弹药惯性视线重构及制导系统设计*
金国强1,2,马清华2,王 萧2,赵阳阳2,王 龙2
(1 清华大学自动化系,北京 100084;2 中国兵器工业第203研究所,西安 710065)
捷联导引头测量信息中耦合了弹体姿态信息,无法直接运用于制导指令解算。基于下视的捷联寻的方案,建立了从探测视线信息和弹体姿态信息中提取惯性视线角的理论解耦模型以及在倾斜稳定情况下的简化形式。通过非线性微分滤波器——跟踪微分器获得平滑的惯性视线角速率,设计了捷联寻的弹药制导综合系统。弹道仿真结果表明:基于下视的捷联寻的方案能够有效实现近程制导弹药的精确制导,具有一定的工程价值。
捷联导引头;下视;惯性视线角速率;跟踪微分器
0 引言
近些年来的多场局部战争和地区性反恐战争表明,精确制导武器已经成为现代局部战争战场上至关重要的攻防手段,用精确制导武器实现在城市、山区等复杂作战环境下的精确打击,从而夺取战争的主动权形成战场威慑也是未来战争模式的发展方向。随着光学、雷达等探测器的视场角范围的提高和寻的跟踪技术的发展,捷联寻的导引头越来越多的成功应用于小型制导弹药上,捷联寻的制导体制也成为精确制导武器未来发展的主要方向之一。
与传统平台稳定式导引头相比,捷联导引头结构简单、成本低、抗高过载,易于小型化和系统共型设计[1]。但是捷联导引头将探测装置与弹体进行固联,只能测量探测装置中轴与目标视线的角偏差,无法精确获得用于制导的惯性视线角速率,同时直接测量的角偏差在惯性视线角上耦合了弹体姿态角扰动信息,故捷联寻的制导弹药惯性视线重构成为捷联制导体制研究的重点[2-3]。
文中基于捷联导引头在近程制导火箭上的应用,采用导引头下视方案,首先推导出了捷联寻的惯性视线角速率的理论解耦公式及倾斜稳定条件下的简化形式,进而引入非线性微分滤波器对直接参与制导的惯性视线角速率进行提取,并设计了捷联制导控制系统,通过六自由度弹道数字仿真对上述工作进行验证与分析。
1 下视捷联导引头弹目视线模型
捷联导引头测量信息是目标相对于探测装置中轴的角偏差,由于探测装置弹体固联,因此弹体在惯性空间中的运动必然会耦合到测量信息中,要想得到惯性空间下弹目视线信息用于制导,必须去除导引头直接测量信息中耦合的弹体运动。
文中所研究的弹体在扰动条件下姿态变化较大,由于导引头视场大小限制,在飞行过程中弹目视线会出现超出视场范围或处于视场边缘非线性区域的情形,严重影响制导过程。而在攻击地面目标时,导引头高低视线只处于单向视场中,为此采用高低方向下视方案,令导引头探测装置中轴在弹体纵向对称面中基于弹体纵轴向下偏离λ角度,为下视角(λ>0)。
为研究下视捷联导引头弹目视线模型,引入3个新的坐标系(见图1):1)探测坐标系Oxdydzd原点O为探测装置中心,Oxd与探测装置中轴重合,指向导弹头部为正,Ozd与Ozb重合,Oyd与Oxd、Ozd构成右手坐标系;2)探测视线坐标系Oxkykzk原O点为探测装置中心,Oxk与弹目连线重合,指向导弹为正,Ozk处于Oxdzd平面中且与Oxk垂直,Oyk与Oxk、Ozk构成右手坐标系;3)视线坐标系Oxsyszs原点O为探测装置中心,Oxs与Oxk重合,Ozs处于Oxz平面中且与Oxs垂直,Oys与Oxs、Ozs构成右手坐标系。各坐标系之间的转换关系见图2,其中探测视线俯仰角ϑk为Oxk轴与平面Oxdzd之间夹角,探测视线方位角ψk为Oxk轴在平面Oxdzd内的投影与Oxd轴的夹角;视线俯仰角qv为Oxs轴与平面Oxz之间夹角,视线方位角qh为Oxs轴在平面Oxz内的投影与Ox轴的夹角;视线转换角qc为Oyk轴与Oys轴之间的夹角。
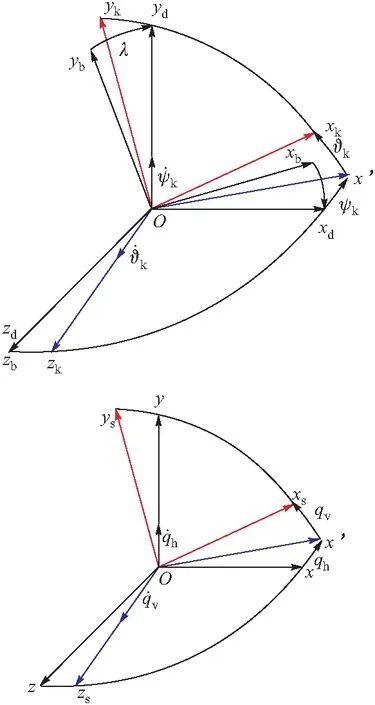
图1 坐标系及角度定义
在导弹实际飞行过程中,捷联导引头只能获得探测视线角ϑk、ψk,而参与制导的惯性视线角qv、qh对应的角速率信息只能通过解耦计算间接获得,解耦理论计算公式推导如下。

图2 各坐标系之间转换关系
由于Oxs轴与Oxk轴重合,故视线坐标系中的单位向量R=(1,0,0)′在探测视线坐标系下的坐标亦为(1,0,0)′,通过图2可知在惯性坐标系下R的坐标Ri可由两种方法计算[4]:
(1)
(2)
得:

(3)
由式(3)可求得:
qv=arcsin(Q)
(4)
(5)
Q=sinϑk·(sinϑsinλ+cosϑcosγcosλ)+cosϑkcosψk· (sinϑcosλ-cosϑcosγsinλ)+cosϑsinγcosϑksinψk
M=sinϑk·(cosλ·(cosψsinγ+sinϑsinψcosγ)- cosϑsinψsinλ)-cosϑksinψk·(cosψcosγ- sinϑsinψsinγ)-cosϑkcosψk·(sinλ· (cosψsinγ+sinϑsinψcosγ)+cosϑsinψcosλ)
N=sinϑk·(cosλ·(sinψsinγ-sinϑcosψcosγ)+ cosϑcosψsinλ)-cosϑksinψk·(sinψcosγ+ sinϑcosψsinγ)-cosϑkcosψk·(sinλ· (sinψsinγ-sinϑcosψcosγ)-cosϑcosψcosλ)
根据式(4)、式(5)便得到了根据惯性测量组件得到的弹体姿态角以及捷联探测器得到的探测视线角解耦计算惯性系下弹目视线信息的方法。在实际应用中,考虑到倾斜稳定有利于探测器锁定目标、导弹稳定飞行以及制导方案实施,故一般在倾斜稳定γ=0的条件下对式(4)、式(5)进行化简得:
从上式可以看出倾斜稳定对于惯性视线角解耦计算而言大大简化,有利于导弹飞行过程中实时在线解耦计算以提高弹目视线制导信息精度。
高低方向下视方案保证了目标在探测装置视场中的线性区,有利于提高弹目视线测量精度保证精确制导过程。图3是探测器俯仰视场±10°时非下视方案与下视角λ=3°在某干扰条件飞行下探测视线俯仰角对比,可以看出非下视方案中已经出现出视场的情况,同时有一段时间靠近视场边缘,而下视方案则有效的避免了上述问题,充分利用了探测器视场范围。
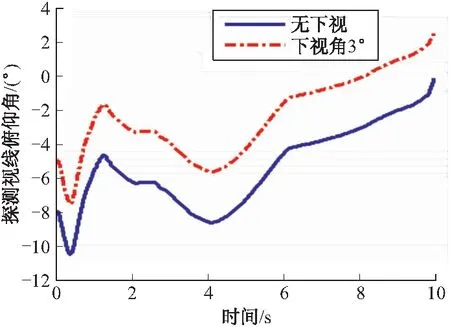
图3 探测视线俯仰角对比
2 基于跟踪微分器的视线角速率提取
由一般情况及倾斜稳定条件下式(4)、式(5)已可得到通过探测器测量的视线信息以及惯性器件测量的弹体角运动信息解算出来的惯性视线角;在制导系统设计的比例导引中,直接用到的信息为惯性视线角速率,故需要从由上述解算信号中合理提取微分信号。
传统的直接差分微分器如下:
n(t)为原始信号中的噪声信号。微分步长τ越小时,微分信号中噪声影响越大。由于捷联制导探测器及惯性器件存在测量噪声,故通过传统差分微分器提取的惯性视线角速率无法应用于比例导引制导律之中,必须设计出合适有效的微分滤波器。
为从耦合测量噪声的原始信号中提取连续的滤波信号和微分信号,韩京清[5]提出了非线性跟踪微分器。非线性跟踪微分器的输出x1(t)与x2(t)可分别看作是原始信号v(t)及其微分信号v′(t)的光滑逼近,基于快速最优控制的离散形式下的非线性跟踪微分器可取为[6]:
(6)
式中fst函数为最速控制综合函数,计算如下:
fst(x1(k)-v(k),x2(k),r,h1)=-r·sat(g(k),δ)
h为跟踪步长,h1为滤波因子,r为跟踪因子。当r越大,输出信号就能越快跟随原始信号但同时会放大耦合噪声影响;当h1越大,输出信号的抗干扰特性越好但同时会增大相位延迟。为了既取得良好的实时跟踪效果,同时尽量消除测量噪声影响,需要对h1和r进行权衡综合考虑。
仿真中在理想惯性视线角度上加入3σ=0.2°的白噪声,跟踪微分器中滤波因子h1=5h,跟踪因子r=20,计算结果如图4所示。在没有滤波的情况下,测量噪声被差分器微分放大使得有效惯性视线角速率信号完全湮没在误差信息中,无法用于制导指令解算;而跟踪微分器则能获得惯性视线角速率的平滑逼近信号,具有较好的跟踪和滤波特性。
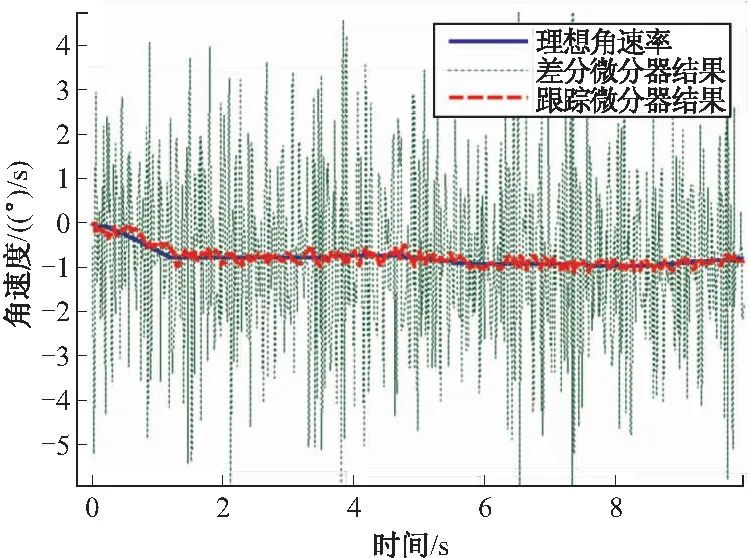
图4 惯性视线角速率
3 制导系统设计
捷联制导弹药的制导系统设计中,一般采用弹上捷联低成本的惯性测量装置——微机电陀螺仪测量弹体三轴姿态角速率,不仅为稳定弹体的控制内回路提供输入信息,同时也用于在线解耦计算惯性视线角速率为制导回路提供制导信息。故捷联探测器与弹上惯性测量装置以及信息计算处理中心形成基于比例导引的制导和控制弹体姿态平稳的自动驾驶仪综合系统,不仅对弹体姿态进行稳定控制保证其摆动不超出捷联探测器的瞬时视场以实现对目标的有效跟踪,同时生成制导指令使得导弹速度矢量按照导引律进行变化实现对目标的精确攻击。制导综合系统如图5所示。

图5 制导综合系统
图中虚线框中各部件及信息处理计算单元可以用一体化的捷联制导控制组件替代,除了实现图中目标信号采集、探测信号处理、陀螺信号采集及姿态解算、制导控制指令生成外,还可完成电源管理、时序控制、舵机驱动等其他功能,进一步加强捷联制导弹药部件的模块化、小型化、集成化和低成本。
值得一提的是,在惯性视线重构的过程中同时用到捷联探测器测量的探测视线信息以及惯性装置测量的弹体姿态信息,两个传感器同时存在测量误差且刻度尺和动态模型不一致会带来导引头隔离度,从而在制导回路中会引起“弹体运动→惯性测量装置→惯性视线重构→制导指令解算→自动驾驶仪→弹体运动”的寄生回路[7],即在各种误差干扰的作用之下,从耦合了弹体运动信息的探测视线信息中解算出的惯性视线角,经过非线性微分滤波器之后产生的惯性视线角速率存在一定的偏差,通过比例导引制导律生成制导指令经自动驾驶仪驱动弹上舵面偏转控制导弹运动带来的弹体姿态改变,经隔离度后通过探测器和惯性装置测量信息重构惯性视线,从而形成了闭环。寄生回路不仅会影响探测器对目标的稳定跟踪,同时会带来相应的制导误差,故需要采取措施抑制捷联制导弹药寄生回路的影响。相关的讨论不在文中考虑范围之内。
4 数字仿真
在数字仿真中设置静止地面目标,位置为Pi0=(1.8 km,0,0)。近程制导火箭在地面发射,初始飞行段通过MEMS惯性器件测姿进行姿态闭环控制;当姿态稳定后在某一时间开始进入制导段,采用经典的比例导引制导率,主要输入信息为按前文方法提取的惯性视线角速率。仿真结果如图6、图7所示。结果表明文中所述惯性视线重构算法能够获得制导所需的惯性视线角速率,基于此方案的捷联寻的弹药能够精确打击近程目标,满足命中精度要求和战术使用需求。

图6 纵向弹道
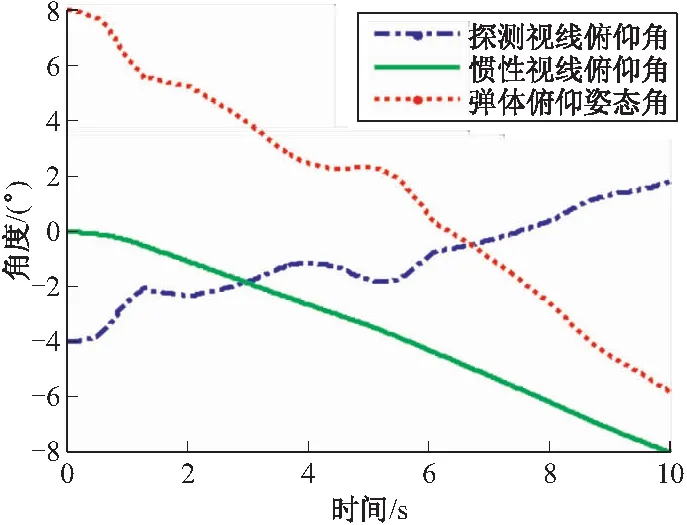
图7 弹体俯仰角与视线俯仰角
5 结论
捷联制导方案对于寻的制导弹药的低成本、小型化、高可靠性发展方向具有重要意义,但捷联导引头无法直接给出制导所需的惯性视线角速率。文中基于捷联导引头下视安装方案,建立了结合弹体姿态信息从探测信息中提取惯性视线角的解耦模型及其在倾斜稳定情况下的简化形式,并通过跟踪微分器获得惯性视线角速率用于制导综合系统设计。结果表明:下视的捷联制导方案能够保证弹道全程目标始终处于导引头线性区中,非线性跟踪微分器提取的惯性视线角速率能够运用于制导综合系统中指令解算,制导精度满足寻的弹药总体设计需求,为工程应用提供了理论支撑。对于由导引头隔离度带来的寄生回路,需要进一步研究相关的信号处理修正方法以减小其对弹体姿态稳定和制导精度的影响。
[1] 祁载康. 制导弹药技术 [M]. 北京: 北京理工大学出版社, 2002: 99-100.
[2] 姚郁, 章国江. 捷联成像制导系统的若干问题探讨 [J]. 红外与激光工程, 2006, 35(1): 1-6.
[3] VERGEZ P L, MCCLENDON J R. Optimal control and estimation for strapdown seeker guidance of tactical missiles [J]. Journal of Guidance Control and Dynamics, 2012, 5(3): 225-226.
[4] 李璟璟. 捷联成像导引头视线角速率估计方法研究 [D]. 哈尔滨: 哈尔滨工业大学, 2008.
[5] 韩京清, 王伟. 非线性跟踪-微分器 [J]. 系统科学与数学, 1994, 14(2): 177-183.
[6] 武利强, 林浩, 韩京清. 跟踪微分器滤波性能研究 [J]. 系统仿真学报, 2004, 16(4): 651-652.
[7] KIM D, RYOO C K, KIM Y, et al. Guidance and control for missiles with a strapdown seeker [C]∥Proc. of the American Institute of Aeronautics and Astronautics Guidance, Navigation, and Control Conference, 2010: 2-5.
LOS Angle Reconstruction and Guidance System Design of Strapdown Seeker Homing Munitions
JIN Guoqiang1,2,MA Qinghua2,WANG Xiao2,ZHAO Yangyang2,WANG Long2
(1 Department of Automation, Tsinghua University, Beijing 100084, China; 2 No.203 Research Institute of China Ordnance Industries, Xi’an 710065, China)
Detecting information of strapdown seeker was coupled with missile attitude information, so it can’t be used for calculating guidance command directly. Based on the downward-looking strapdown homing scheme, the theoretical decoupling model of LOS(line-of-sight) angle from detecting LOS information and missile attitude information was established, as well as its simplified form under rolling stabilizing circumstance. By means of a nonlinear differential filter-tracking differentiator, smooth inertial LOS rate was acquired and a guidance synthetic system of strapdown seeker homing munitions was designed. Trajectory simulation results show that, based on downward-looking strapdown homing scheme, precise guidance of short-range guided munitions can be accomplished effectively, which has definite value in engineering.
strapdown seeker; downward-looking; initial LOS rate; tracking differentiator
2015-12-29
金国强(1991-),男,湖北荆门人,硕士研究生,研究方向:导弹导航、制导与控制。
TJ765.3
A
猜你喜欢
数学物理学报(2022年5期)2022-10-09
黑龙江大学自然科学学报(2022年1期)2022-03-29
北京航空航天大学学报(2017年5期)2017-11-23
北京航空航天大学学报(2017年12期)2017-04-23
北京航空航天大学学报(2017年10期)2017-04-20
制导与引信(2016年3期)2016-03-20
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
火控雷达技术(2016年3期)2016-02-06
火控雷达技术(2016年1期)2016-02-06
火控雷达技术(2016年1期)2016-02-06