智能小车控制技术的实现
2016-02-27 07:18:40余庚汤紫雄吕守向
泰山学院学报 2016年3期
余庚,汤紫雄,吕守向
(1.福建工程学院国脉信息学院,福建福州350014;2福州理工学院信息工程系,福建福州350506)
智能小车控制技术的实现
余庚1,汤紫雄2,吕守向2
(1.福建工程学院国脉信息学院,福建福州350014;2福州理工学院信息工程系,福建福州350506)
目前智能小车的研究与实现多数依托于射频通信技术,其保密性、功能兼容扩展性、大数据实时传输的有效性都相对较弱,达不到智能化的诸多要求,这就限制了其在市场中的推广应用.为此,本文提出一种基于STC89C52控制芯片、嵌入式OpenWrt系统、传感器为主导的控制技术来实现对智能小车的更加自动化的控制.通过加密的无线终端接入到智能小车的AP,来控制小车完成一系列智能化的动作,诸如当前视像实时传输,画面采集,实时探测温度、距离、路障并及时自动调整行进路径等.该智能控制技术的实现使智能小车具备了更强大的安全性和信息处理能力,可运用在多种场合.
AP;智能控制;OpenWrt;单片机;上位机
智能控制可通过无线传感、单片机、嵌入式系统等技术来综合实现.此类智能控制小车可经由无线终端接入其热点来实时精确地控制其运行,状态.既能按照预设模式在指定环境下自动运行也能够在人类无法介入的高危领域中通过在无线终端调整参数来控制其智能地运行.譬如地质勘探、无人机巡逻等领域.
目前智能小车的研究与实现多数依托于射频通信技术,受限于其功能扩展性和智能性使得在市场中的推广应用有限.故本文引入嵌入式OpenWrt[1]系统并结合单片机和传感等技术来实现智能小车自动化地采集现场视频流、音频流、自动捕捉异常画面,适时开启夜视功能检测环境温度、路障并自动调整行动轨迹等技术,以此扩展智能小车的智能性和灵活性.
1 智能小车原理系统
智能小车控制系统由供电模块、数据中心、单片机主控单元、电机驱动电路、传感器等组成.主控板和驱动板均采用排针接口相互咬合形成上下结构并采用12V可控式风扇为驱动板降温.整个小车智能控制系统的结构如下图1所示.
图1中,数据中心(含AP)采用一个嵌入式OpenWrt的WR703N,在获取远程终端的指令后将探针捕捉到的环境视频流、音频流和传感器所采集的现场信号传回到远程无线控制终端.视频流是通过探头采集并在压缩编码后经OpenWrt系统的mjpg-stream程序处理完再利用IEEE 802.11[2]发送到远程无线控制终端进行解码显示.音频流的采集则通过listener程序模块进行处理,其播放是通过OpenWrt系统的madplay程序模块进行MP3音频数据解码输出到音频模块来实现.当数据中心接收到控制终端的指令后通过内部的TCP转串口程序ser2net将接收到的指令通过WR703N串口发送到单片机的串口接收端,单片机接收到这些指令后执行相应的动作,如:小车行进、循迹、舵机运动、避障、传感器信号采集等.数据中心和MCU主控单元通过串口连接进行通信,波特率为9600.主控单元采用STC89C52RC型51单片机[3],其用于统筹各模块、电路的协调工作.传感器单元用于感测环境信息并传送到单片机,再将数据回传给上位机,如温/湿度数据、前方路障数据,以及采集路面信号完成循迹、自动避障等.根据指令安排,电机驱动用于促发电机执行反转、正转,制动进而使小车后退、前进、转弯,停止.舵机云台则控制横向、纵向扭转.供电系统采用LM2596系列开关型稳压器.

图1 智能小车控制系统结构图
2 OpenWrt系统设计
OpenWrt用于处理大数据,比如通信数据包的处理,视像流和音频流的编解码等.硬件结构下如图2所示.
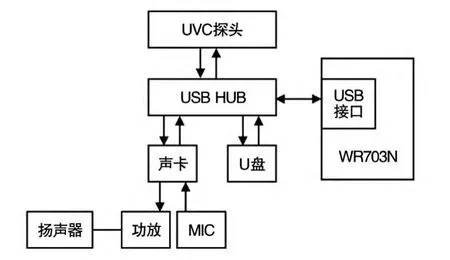
图2 OpenWrt结构
OpenWrt[4]操作系统的编译要运行在Ubuntu环境下,在内核配置单里勾选kmod-usb-storage,kmod-usb2,fdisk,kmod-usb-storage,kmod-usb2,fdisk,swap-utils,e2fsprogs,ser2net,mjpgstreamer,motion,listener,kmod-video-uvc,kmod-usb-core,kmod-nls-base,madplay,kmod-soundcore,kmod-usb-audio,samba-server,luci-app-samba,kmod-input-gpio-keys-polled,kmod-input-gpio-keys-polled,kmod-i2c-core,kmod-video-core,kmod-input-core,kmod-usb-uhci,kmod-usb-ohci,kmod-ath,kmod-ath9k,kmod-ath-common,kmod-ipt-core,kmod-ipt-nat,cfg 80211为模块.其中mjpg-streamer用来处理视频信号,listener用来音频采集,madplay用来音频播放.编译好固件后要下载到WR703n路由器中运行,并进行相关配置.
3 主控单元设计
MCU主控单元的主控芯片为STC89C52RC单片机,采用11.0592M晶振.该单片机控制系统的设计包含了红外夜视电路设计、传感电路设计[4]、电机驱动控制电路设计、超声波模块设计、舵机云台控制模块设计、电量采集模块设计、循线和自动避障控制设计等.其中,红外夜视功能采用恒流源电路驱动大功率红外LED来执行主动式红外夜视功能.现将智能小车工作状态配置为如下表1.

表1 智能小车工作状态信息表
鼠标云台通过上位机来实现智能化地控制舵机,也可在远程无线控制终端的GUI界面上来动态调整舵机角度的大小.控制终端发送到单片机的数据格式见表2:

表2 数据格式
其中,0°≤α≤180°,0°≤β≤180°.主控单元STC89C52RC单片机通过对上位机发送的数据进行解析来控制舵机的转动,X轴部分程序代码如下:

Y轴的控制和X轴原理相同.这里将hight_votage和hight_votage1的取值范围配置为13≤hight_ votage≤37和16≤hight_votage≤56意在将舵机的扭转角度控制在合理范围内.
4 供电设计
本设计采用LM2596-5V开关稳压芯片构成5V稳压电路给智能小车各模块芯片电路供电.电机的供电是把12V电压通过LM2596-adj稳压电路转换成6.77V~12V可调电压便于电机调试及和其它类型电机兼容.其输出电压的公式为:

其中,Vref=1.23V,R2=900Ω~1.9KΩ,R1=140Ω.其中单独为主控单元和WR703N供电的系统设计为如下图3所示.
5 系统流程设计
实现智能[5]小车自动控制的流程是由远程无线终端控制平台(即:上位机)通过socket将相应指令下发给数据中心(即:下位机)的WR703N.WR703N把收到的IEEE 802.11数据通过ser2net转换成串口数据传送到主控单元的STC89C52RC单片机控制器,进而执行相应的操作.整个智能小车控制过程的流程设计如下图4所示.
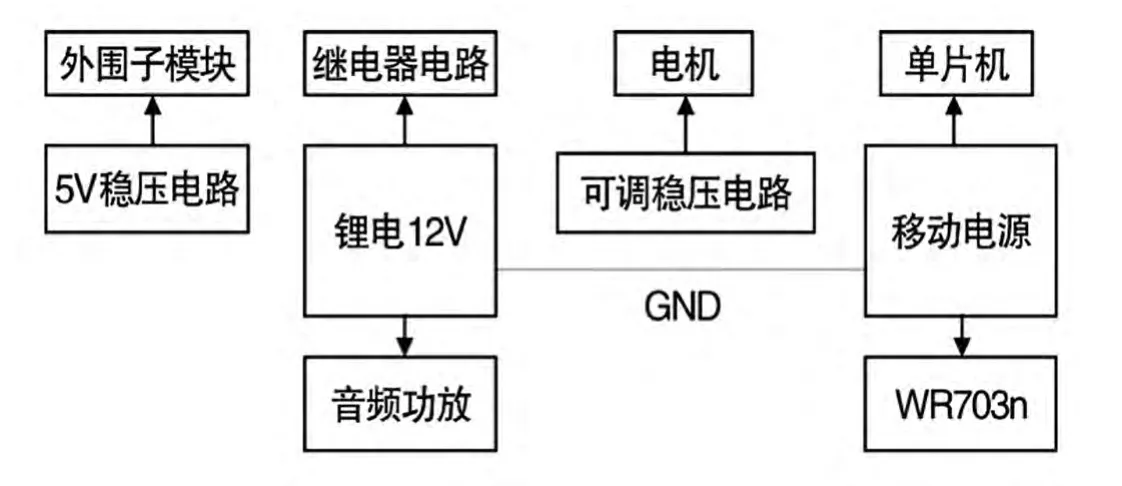
图3 供电系统构造

图4 智能小车控制流程

图5 上位机流程设计图
远程无线控制终端将Visual Studio作为集成开发环境,通过socket编程来实现上位机控制系统[6]的设计.上位机运行流程图如下图5所示.
下位机程序的主要功能是执行控制策略,包括主程序、数据处理、通信以及控制部分.如:信息的采集和数据的处理、控制算法的实现如PWM算法,MCS-51程序的编译及实现等.
6 结束语
本次研究综合应用了单片机、wifi等技术来实现智能小车智能化自动化控制,并深入研究了Open-Wrt系统,将其融入到智能小车主控单元来扩展设计周边电路,使小车具备更好的信息处理能力和环境适应能力.主控芯片选用STC89C52RC单片机,负责对上位机发出的指令进行分析及对各模块电路的控制,包括对超声波传感器,温度传感器,光电传感器等各传感模块的控制.下位机的程控设计囊括了主程序、电机控制、舵机控制、循线、自动避障等诸多模块控制程序的设计.此外,友好的基于C#.net[7]人机界面设计使得本次控制系统的设计趋于人性化和高度智能化.这超越了传统智能小车平台控制系统,有助于扩展智能小车在诸多领域的推广和应用.
[1]陈宏田.基于安卓系统联网智能车的设计和研究[D].南京:南京师范大学电气与自动化工程学院,2015.
[2]连亚波,王宏敏.无线传感网中的数据传输调度研究[J].科技创新与应用,2015(17):85.
[3]杨淦.基于无线网络控制的移动机器人设计[D].天津:河北工业大学控制科学与工程学院,2015.
[4]陈书旺,宋立军,许云峰.传感器原理及应用电路设计[M].北京:人民邮电出版社,2015.
[5]徐元文,张婧婧,陈宁.基于Arduino的无线环境探测小车的设计[J].计算机与现代化,2015(6):119-121.
[6]张金.电子系统设计基础[M].北京:电子工业出版社,2011.
[7]李玲香,罗鹏.智能小车对提高智能居家系统稳定性的应用研究[J].湖南科技学院学报,2014(5):125-128.
Realization of Intelligent Car Control Technology
YU Geng1,TANG Zi-xiong2,LV Shou-xiang2
(1.Guomai Information College,Fujian University of Technology,Fuzhou,350014;
2.Department of Information Engineering,Fuzhou Institute of Technology,Fuzhou,350506,China)
Recently,research and realization of aintelligent car is based on radio frequency communication technology.The security,the compatibility of the function and the real time transmission of large data is relatively weak.This is far away from the requirements of intelligent and limits its application in the market.Hence,a control technology based on STC89C52 control chip,embedded OpenWrt system,sensor is proposed,which can realize the automatic control of intelligent car.Besides,completing intelligent action through accessing to AP in the intelligent car can realize real time video transmission,temperature detection,obstacles detection,automatically adjust the driving path.The technology ensures the intelligent car to be the ability of security and information processing,which can be used in many occasions.
AP;intelligent control;OpenWrt;single chip microcomputer;upper computer
TP242.6
A
1672-2590(2016)03-0055-05
2016-03-15
福建省教育厅中青年教师教育科研项目(JB14229)
余庚(1983-),男,福建福州人,福建工程学院国脉信息学院讲师.
猜你喜欢
快乐语文(2020年36期)2021-01-14 01:10:32
科学大众(2020年17期)2020-10-27 02:49:02
自动化学报(2019年6期)2019-07-23 01:18:36
文苑(2018年22期)2018-11-19 02:54:18
车迷(2018年12期)2018-07-26 00:42:22
电子制作(2018年8期)2018-06-26 06:43:02
电子制作(2018年1期)2018-04-04 01:48:14
制造业自动化(2017年2期)2017-03-20 14:26:08
中国老区建设(2016年3期)2017-01-15 13:53:26
山东工业技术(2016年15期)2016-12-01 05:31:14