
基于轨迹预测的二阶DPA扩散抑制方法*
2016-02-24 08:55孙承钢张奕群
现代防御技术 2016年6期
孙承钢,张奕群,2
(1.北京电子工程总体研究所,北京 100854; 2. 北京仿真中心 航天系统仿真重点实验室,北京 100854)
探测跟踪技术
基于轨迹预测的二阶DPA扩散抑制方法*
孙承钢1,张奕群1,2
(1.北京电子工程总体研究所,北京 100854; 2. 北京仿真中心 航天系统仿真重点实验室,北京 100854)
二阶动态规划算法(DPA)是一种有效的点目标检测算法,能够在低信噪比条件下检测目标,但也存在着评价函数扩散等缺点。针对二阶DPA的这一不足,提出了抑制二阶DPA评价函数扩散的方法。与其他抑制方法相比,提出的方法既有效地降低了噪声对检测过程的影响、抑制了评价函数扩散的现象、提高了对目标的检测能力,又更适合于硬件实现。
目标检测;Markov过程;动态规划;轨迹预测;卡尔曼滤波;评价函数扩散
0 引言
点目标检测与跟踪,特别是低信噪比条件下的点目标检测与跟踪,一直是一个困难的问题,这是由于点目标没有形状和纹理特征,而且信噪比比较低时,目标的灰度与噪声相仿,所以很难将目标与噪声区分开来,以致对点目标的检测和跟踪十分困难。
从20世纪六七十年代起,人们开始系统地研究点目标跟踪问题,并提出全局最近邻(GNN)算法[1]、概率数据关联(PDA)算法[2]、联合概率数据关联(JPDA)算法[3-4]、多假设跟踪(MHT)算法[5-7]、动态规划算法(DPA)[8-9]等多种算法,其中DPA是一种重要的先跟踪后检测算法,也是目前最有效的低信噪比跟踪算法,它通过逆向分步寻优实现在跟踪过程中检测目标,取得了检测效果和计算量上的平衡。然而DPA也存在着一些不足[10],例如检测过程容易受到噪声干扰、由于评价函数扩散导致的目标覆盖等。
由于DPA存在上述不足,有人提出了基于二阶Markov过程的DPA[10](简称二阶DPA),该算法改善了对低信噪比运动目标的检测能力,缩短了所需的检测帧数,但是对评价函数扩散的抑制并不理想,所以文献[10]中专门提出了一种抑制评价函数的方法,但该方法不适合于硬件实现。为了解决上述问题,本文提出了一种方法,该方法既能有效抑制评价函数的扩散,又比较适合于硬件实现。
1 基于二阶Markov过程的DPA[10]
二阶DPA是文献[10]首次提出的,其基本内容介绍如下。在基于二阶Markov过程的DPA中采用的评价函数[11]为
s(θ(k),θ(k-1),…,θ(1)) =
(1)

由于式(1)的计算量很大,为简化寻优过程,将式(1)中的分式部分整理为递推形式:
P(θ(k)|θ(k-1),θ(k-2),…,θ(1))·
(2)
假设目标满足二阶Markov模型,则式(2)等号右侧的状态转移概率P(θ(k)|θ(k-1),θ(k-2),…,θ(1))可简化为
P(θ(k)|θ(k-1),θ(k-2),…,θ(1))=
P(θ(k)|θ(k-1),θ(k-2)),
k≥3.(3)
定义:
Θk
并令
lnP(θ(k)|θ(k-1),θ(k-2)),k=3,
lnP(θ(2)|θ(1)),
结合式(1)及(2),(3),得到递推形式的评价函数:
s(θ(k),θ(k-1)…,θ(1))=a(k)+s(θ(k-1),
…,θ(1)),k≥3,
s(θ(2))=a(2)+s(θ(1)).
(4)
在DPA中,评价函数最大的轨迹认为是目标的真实轨迹,因此


(5)




s(θ(2),θ(1))=a(2)+s(θ(1)).
(6)

根据位置的估计误差,就可以确定搜索范围。由于搜索范围减小,二阶DPA中评价函数扩散范围与传统DPA相比要小。为了进一步抑制评价函数扩散,文献[10]提出了一种抑制评价函数扩散的方法。该方法将整幅图像分成了2部分,一部分是包含目标的关联区域;另一部分则是未检测出目标的区域。通过将目标轨迹的关联始终限制在关联区域内,减小关联到目标轨迹上的噪声数量,从而达到抑制评价函数扩散的目的。该方法在软件仿真时有着良好的抑制效果,但在实际应用中会遇到以下问题:第一,在对图像进行处理时,该方法首先对搜索区域内的轨迹进行关联。由于搜索区域可能在图像的任意位置,所以在实际处理前必须获取到整幅图像的数据信息,这会浪费大量的时钟周期。第二,目标搜索区域的个数和大小不固定,导致在硬件设计时必须预先留出足够的资源,而这极易导致硬件资源的浪费。
由于上述缺点的存在,导致该算法的实时性较差、硬件资源的消耗也比较大。鉴于以上原因,提出了一种基于轨迹预测的扩散抑制方法,该方法既能够很好的抑制评价函数扩散,又更适合于硬件实现。
2 基于轨迹预测的扩散抑制方法
文献[10]的扩散抑制方法的关键就是划定目标关联区域,将能够与目标轨迹关联的像元限制在该区域内,从而实现对扩散的抑制。但这样做就会产生上一节中所述的2个缺点。所以提出利用轨迹预测来抑制评价函数扩散的方法,因为在此方法中不再需要划定目标关联区域,从而避免了划定目标关联区域所带来的问题。
2.1 原理分析
对于一幅分辨率为M×M的图像,其像素点的测量值z(k)通常有如下定义:
式中:1≤i,j≤M,zij(k)为像素点(i,j)的观测值并满足如下关系[12]:
式中:μ>0。从上式可以看出,目标所在观测数据的均值一定比噪声的均值大。因此,所有通过DPA检测到的轨迹中,目标轨迹的评价函数是最大的。
根据DPA中的寻优关系,所有像素点都是关联到其附近的评价函数最大的轨迹上,这就使得会有多个像素点关联到目标轨迹上,如图1所示,导致目标周围像素点的评价函数增大,出现评价函数扩散现象。因此如果能够减少与目标轨迹关联的像素数量,就能够有效降低评价函数的扩散程度。
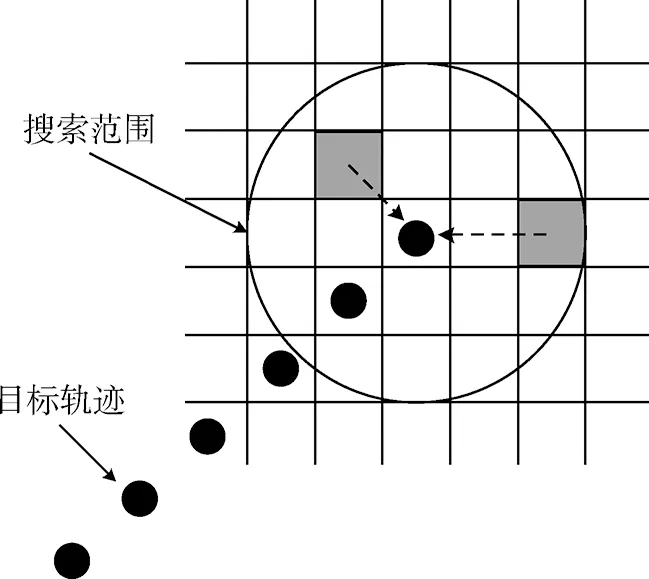
图1 评价函数扩散的原因Fig.1 Reason of merit function scattering
2.2 基于轨迹预测的扩散抑制方法
根据上述分析,在式(6)中引入权重ω:

s(θ(2),θ(1))=a(2)+s(θ(1)),
(7)

扩散抑制方法的具体实现,如图2所示。可分为以下几个步骤:
(1) 根据二阶DPA确定搜索范围Rs;
(2) 根据式(6)计算评价函数;

从实现步骤中可以看出,扩散抑制方法不需要划定关联区域,可以对获取到的像元信息进行实时处理,从而节约大量的时钟周期。同时扩散抑制方法的算法结构固定,其实现过程中其所需的硬件资源固定,不会出现硬件资源的浪费。由此可以看出,此方法很好的克服了文献[10]中方法所存在的2个缺点。
2.3 状态估计
在估计目标状态前,先要建立目标运动模型。设在第k帧时,目标的运动状态为
假设目标不机动,即目标的运动轨迹基本上是一条直线,其运动状态模型[13-14]为
θ(k+1)=Fkθ(k)+Gkv(k),
式中:
式中:Tk+1是第k+1帧图像与第k帧图像间的时间间隔;v(k)为0均值的白噪声;状态误差满足:
第k帧图像的观测模型为


Rk
为了方便,假设图像中的噪声为0均值的白噪声。


图2 扩散抑制方法的实现过程Fig.2 Realization of method for restraining merit function scattering




3 仿真验证
下面通过仿真来说明扩散抑制方法对评价函数扩散的抑制效果。实验的详细参数如表1所示。

表1 实验参数Table 1 Parameter of test
其中,信噪比定义为目标灰度和噪声方差之比。
通过比较图3和图4可以看出,文中提出的扩散抑制方法能够有效地抑制评价函数扩散,其抑制效果与文献[10]中方法的抑制效果相差不多。在图4中,目标位于评价函数最大的2个像素点处,评价函数的扩散已经被抑制掉,只要给定合适的阈值,就可以直接将目标确定出来。
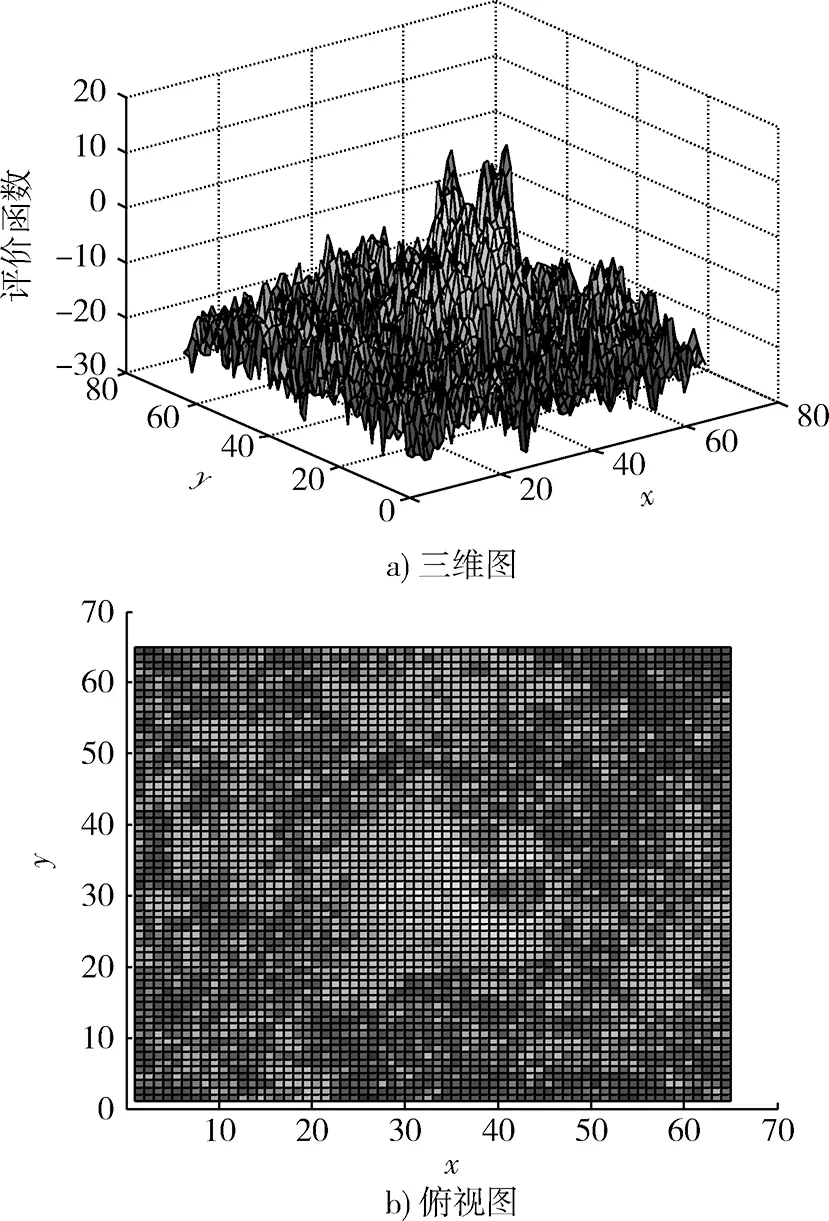
图3 二阶DPA的评价函数Fig.3 Merit function of second-order DPA
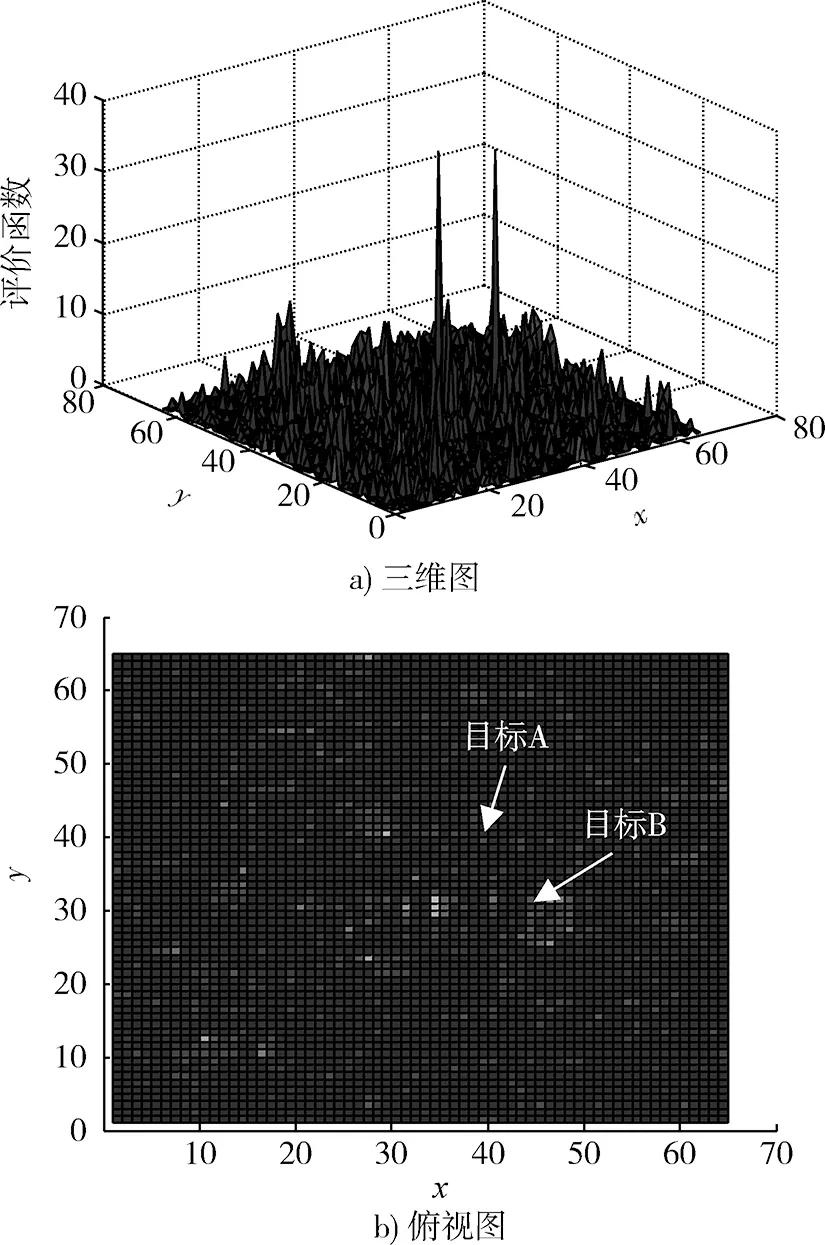
图4 扩散抑制方法的评价函数Fig.4 Merit function of method for restraining merit function scattering
4 结束语
本文提出了一种抑制二阶DPA评价函数扩散的方法。通过引入目标运动状态,减小搜索范围大小,进而抑制评价函数的扩散。仿真结果表明,该方法能够有效的抑制评价函数扩散。从表面上看由于引入卡尔曼轨迹预测使得算法的计算变得极为复杂,实际上由于目标运动模型中的矩阵都是稀疏矩阵,使得卡尔曼递推计算过程变得非常简单,很容易硬件实现。但是因为目标在搜索范围R′内的概率小于1,导致算法的检测概率有一定程度的减小,如何克服这一缺点还有待于进一步研究。
[1] BLACKMAN S, POPOLI R. Design and Analysis of Modern Tracking Systems[M].Country Norwood,United States: Artech House, 1999.
[2] BAR-SHALOM Y, KIRUBARAJAN T, LIN X. Probabilistic Data Association Techniques for Target Tracking with Application to Sonar, Radar and EO Sensors[J]. IEEE Aerospace and Electronic Systems Magazine, 2005, 20(8): 37-56.
[3] FORTMANN T E, THOMAS E, BAR-SHALOM Y, et al. Sonar Tracking of Multiple Targets Using Joint Probabilistic Data Association[J]. IEEE Journal of Oceanic Engineering, 1983, 8(3): 173-184.
[4] BAR-SHALOM Y, FORTMANN E T. Tracking and Data Association[M].New York:Academic Press, 1988
[5] REID D B. An Algorithm for Tracking Multiple Targets[J]. IEEE Trans. on Automatic Control,1979, 24(6):843-854.
[6] REID D B.A Multiple Hypothesis Filter for Tracking Multiple Targets in a Cluttered Environment[R]. Lockheed Missiles and Space Company Report, 1977.
[7] BLACKMAN S S. Multiple Hypothesis Tracking for Multiple Target Tracking[J]. IEEE Aerospace and Electronic Systems Magazine, 2004, 19(1): 5-18.
[8] BARNIV Y. Dynamic Programming Solution for Detecting Dim Moving Targets[J]. IEEE Trans. on Aerospace and Electronic Systems,1985, 21(1): 144-156.
[9] BARNIV Y,KELLA O. Dynamic Programming Solution for Detecting Dim Moving Targets Part II: Analysis[J]. IEEE Trans. on Aerospace and Electronic Systems, 1987,23(6):776-788.
[10] 王硕. 基于二阶Markov过程的动态规划法及其在点目标检测中的应用[D].北京:中国航天科工第二研究院,2015. WANG Shuo. Dynamic Programming Algorithm Based on Second-Order Markov Process and Its Application on Point Target[D].Beijing: The Second Research Academy of CASIC,2015.
[11] ARNOLD J, SHAW S, PASTERNACK H. Efficient Target Tracking Using Dynamic Programming[J]. IEEE Trans. on Aerospace and Electronic Systems,1993, 29(1): 44-56.
[12] TONISSEN S M, EVANS R J. Performance of Dynamic Programming Techniques for Track-Before-Detect[J]. IEEE Trans. on Aerospace and Electronic Systems,1996, 32(4): 1440-1451.
[13] PULFORD G W, LA SCALA B F, Over-the-Horizon Radar Tracking Using the Viterbi Algorithm-Second Report to High Frequency Radar Division[R]. University of Melbourne, Technical Report CSSIP 16/95, Aug. 1995.http://web.ukonline.co.uk/gpulford/Pdf doc/vda-rep2.pdf.
[14] PULFORD G W, LA SCALA B F. Over-the-Horizon Radar Tracking Using the Viterbi Algorithm-Third Report to High Frequency Radar Division[R]. University of Melbourne, Technical Report CSSIP 27/95, Dec. 1995. http://web.ukonline.co.uk/gpulford/Pdf doc/vda-rep3.pdf.
[15] PULFORD G W, LA SCALA B F. Multihypothesis Viterbi Data Association: Algorithm Development and Assessment[J]. IEEE Trans. on Aerospace and Electronic Systems, 2010, 46(2): 583-609.
Restraint Method for Merit Function Scattering of Second-Order DP Algorithm Based on Trace Prediction
SUN Cheng-gang1, ZHANG Yi-qun1,2
(1.Beijing Institute of Electronic System Engineering,Beijing 100854, China;2.Science and Technology on Special System Simulation Laboratory,Beijing 100854,China)
The second-order dynamic programming algorithm (DPA) is effective on target detection. The low SNR target can be detected with this algorithm. But the algorithm still has some shortages like merit function scattering. Aiming at the shortage of the second-order DPA, a method is put forward to restrain the merit function scattering. With the method, the impact of noise on the detection process can be reduced, and the merit function scattering can be restrained. The method hasbetter detection ability,and can be implemented on hardware much more easily.
target detection; Markov process; dynamic programming; trace prediction; Kalman filter; assessment function scattering
2016-03-08;
2016-05-15
有
孙承钢(1990-),男,辽宁大连人。硕士生,主要研究方向为导航、制导与控制。
10.3969/j.issn.1009-086x.2016.06.015
TN953;N945.13
A
1009-086X(2016)-06-0085-06
通信地址:100854 北京142信箱30分箱
E-mail:15311449734@189.cn
猜你喜欢
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
新世纪智能(数学备考)(2021年9期)2021-11-24
中等数学(2021年9期)2021-11-22
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
当代陕西(2019年15期)2019-09-02
学苑创造·A版(2018年11期)2018-02-01
读者(2017年5期)2017-02-15
北京航空航天大学学报(2016年7期)2016-11-16
