基于MATLAB的破碎机液压伺服系统动态特性仿真
2016-02-23 10:33尹跃峰王亚安康新亚闫栋
装备制造技术 2016年12期
尹跃峰,王亚安,康新亚,闫栋
(1.机械工业第六设计研究院有限公司,河南郑州450007;2.兰州兰石能源装备工程研究院有限公司/甘肃省高端铸锻件工程技术研究中心,甘肃兰州730314;3.南阳市天锐机电有限公司,河南南阳473000)
基于MATLAB的破碎机液压伺服系统动态特性仿真
尹跃峰1,王亚安2,康新亚1,闫栋3
(1.机械工业第六设计研究院有限公司,河南郑州450007;2.兰州兰石能源装备工程研究院有限公司/甘肃省高端铸锻件工程技术研究中心,甘肃兰州730314;3.南阳市天锐机电有限公司,河南南阳473000)
以新型PG406盘辊式破碎机液压伺服系统为例,利用MATLAB中的Simulink软件对液压伺服系统进行动态仿真,并以阀控液压缸为例建立了PG406盘辊式破碎机的液压伺服系统的动态理论模型,得出该液压伺服系统的仿真模型。通过仿真结果可知,运用MATLAB分析方法是对破碎机液压伺服系统的动态特性进行仿真的有效途径,同时也为广大读者进一步将MATLAB用于液压控制系统的动态仿真提供了参考。
盘辊式破碎机;MATLAB;动态特性;仿真
破碎机广泛运用于矿山、冶炼、建材、公路、铁路、水利和化学工业等众多行业,其运行环境复杂,工作条件恶劣[1]。PG406型盘辊式破碎机是一种新型的以碾压为主兼有挤压机理的大型单元破碎机,适用于莫氏硬度6度以下的物料,可将40 mm的矿石等物料一次破碎至6 mm以下,破碎比大,生产率,在多种生产场合可以替代传统的鄂式、圆锥、齿辊式和冲击式破碎机[2],具体结构如图1所示。液压伺服系统作为该盘辊式破碎机控制系统中的关键部分,对整机的使用性能、工艺性能及整机成本有重要影响。本文针对液压伺服系统的动态特性进行研究,旨在为后续设备的研发提供理论依据和技术指导。
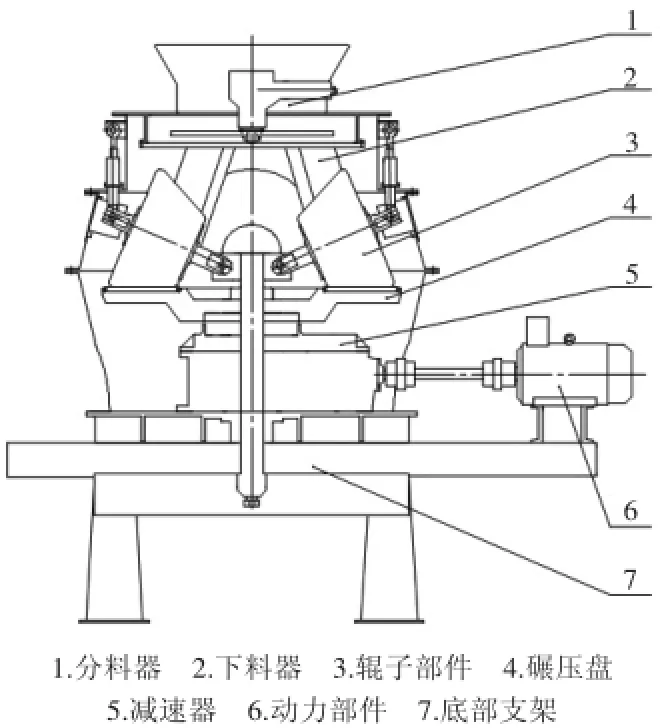
图1 PG406型盘辊式破碎机的结构
2 MATLAB/Simulink简介
MATLAB是目前国际上广泛使用的一种功能强大的数值计算和仿真软件,利用该软件的仿真工具箱,可以方便地实现对机构的动态仿真分析,提高设计及分析效率,从众多的设计方案中寻找出最佳设计方案,提高设计水平和设计效率。
Simulink作为MATLAB软件中的一个可视化、交互式仿真工具,可在MATLAB框图设计环境的基础上,实现动态系统的建模、仿真和分析。它完全支持图形用户界面,无须考虑算法的实现,主要针对创造性算法和模块化的结构设计,被广泛应用于线性系统、非线性系统、数字控制及数字信号处理的建模和仿真中。Simulink工具既可以采用连续采样时间或离散采样时间建模,也能采用两种混合的采样时间进行建模,同时也支持系统中的不同部分的不同的采样速率。采用Simulink工具对模型进行定义后,可通过Simulink的菜单或MATLAB的命令窗口对其进行仿真;使用Scope等图形模块,在进行仿真的同时,就能看到其仿真结果,同时,仿真结果还可以在MATLAB软件的工作空间中进行后处理[3,4]。
3液压系统数学模型的建立
对于如图2所示的新型PG406盘辊式破碎机液压伺服控制系统,以四通滑阀为研究对象,由其阀口流量方程、液压缸的流量连续方程、液压缸和负载的力平衡方程,即可求得系统的仿真数学模型,具体求解过程略去。图中a=0.4b,数学模型的表达式如下:

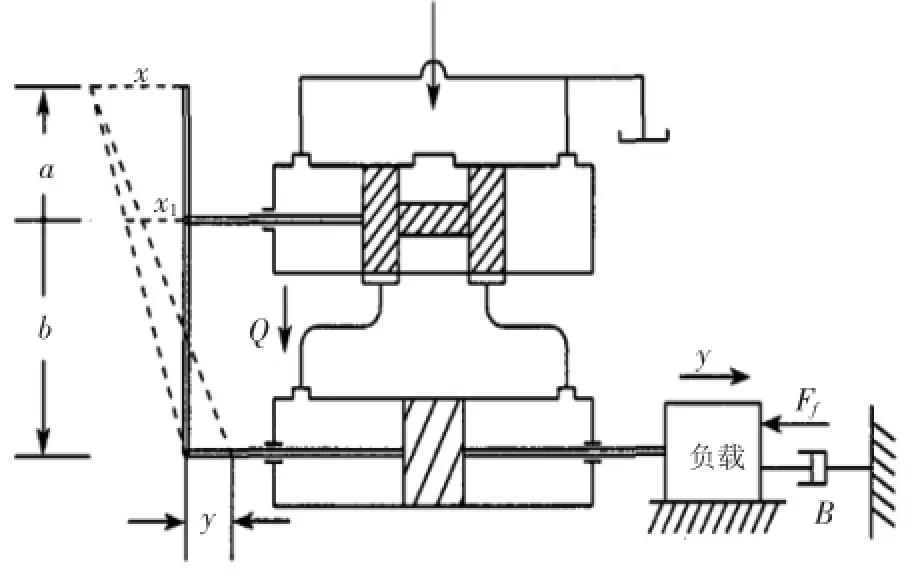
图2 机械阀控液压缸示意图
4仿真模型的建立
MATLAB所提供的Simulink包含很多常用的子模块库,比如Sink(显示输出模块)、Source(输入源模块)、Continuous(线性连续系统模块)、Discrete(线性离散系统模块)和Connections(连接模块),每个子模块库中包含同类型的标准模型,这些模块可直接用于建立系统的Simulink框图模型。为了仿真方便,需要将模型中各参数进行初始化[4]。图2中输入源子模块与图3中的X相对应。在该机械阀控液压缸仿真模型中,将输入源取定为阶跃信号,示波器作为该模型的显示子模块,用于显示模型的仿真结果。
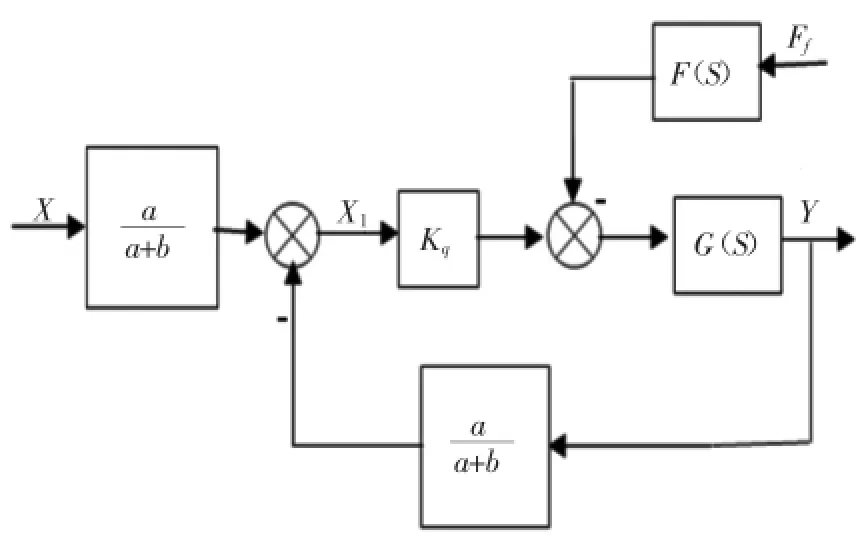
图3 阀控液压系统的方框图
在图4的系统仿真模型的基础上,运用Simulink软件分析系统的ode45s求解器对阀控液压缸的液压伺服系统进行仿真计算。这里,选择Simulink软件界面上的Simulation的Start选项,然后再点击其中的示波器,就可以得到阀控液压缸的液压伺服系统模型的仿真结果,如图4所示。通过对该伺服系统模型的仿真,从图5的Simulink示波器输出图形中可以清楚地看到,阀控液压缸系统模型在阶跃输入下,最初有一个较大的振荡,经过一段时间后该系统达到稳定状态。通过仿真图形,可以获得系统的大致动态时间;还可以设定不同的系统参数,通过观察各个状态下的结果数据得出各参数的最优值。

图4 阀控液压缸系统的仿真模型

图5 Simulink中示波器输出图形
5采用Bode图对系统稳定性的判定
可以采用MATLAB中的Bode图对系统的性能进行判定。图6所示系统的开环传递函数为:


图6 液压伺服系统的Bode图
编写M-文件,内容如下:
num=[29.35];
den=[6.218e-006 1.05e-003 1 0];
G=tf(num,den);
bode(G);
[Cm,pm,Wg,Wp]=margin(G);
运行后可得
幅值裕度Cm=5.7535,相位裕度pm=88.2,
均为正值,可判定系统稳定。
6结束语
(1)通过对破碎机液压系统的动态仿真可以看出,运用MATLAB软件中的Simulink工具,可以直接根据系统的数学模型来构造仿真模型,无需编制复杂的程序,从而极大地提高了编程效率;直接利用数学模型进行仿真,简单而又可靠,直观而又逼真。
(2)对破碎机液压伺服系统进行仿真,可以评价该液压伺服系统的特性,找出影响该液压系统性能的主要参数,从而制定合理的优化方案,提高液压伺服系统的工作性能。
(3)使用MATLAB软件中Bode图的绘制函数命令,能够方便的判定系统的稳定性,求出稳定裕度值。
(4)运用MATLAB软件中的Simulink工具对液压系统进行动态仿真,得出其系统的动态特性,为以后同类型破碎设备伺服控制系统的研发提供了理论基础。
[1]彭光.常用破碎机的发展现状及日常维护[J].中国新技术新产品,2009,22(11):149-150
[2]李大磊,陈广飞.WXP-200型盘辊式破碎机减速器箱体强度的有限元分析[J].矿山机械,2011,39(7):77-80
[3]李新成,樊琳,张振.摆动导杆机构的Matlab运动学仿真[J].机械研究与应用,2008,21(1):94-96
[4]杨国平,杨襄璧,刘中.用MATLAB语言对液压破碎锤冲击过程的仿真研究[J].筑路机械与施工机械化,2002,19(1):5-8.
The Dynam ic Characteristics Simulation of Hydraulic Servo System s for the Crusher Based on MATLAB
YIN Yue-feng1,WANG Ya-an2,KANG Xin-ya1,YAN Dong3
(1.No.6 Institute of Design and Research of Machine Building Industry,Zhengzhou Henan 450007,China;2.Lanzhou LS Energy Equipment Engineering Institute Co.,Ltd./Gansu Engineering&Technology Research Center For Casting and Forging,Lanzhou Gansu 730314,China;3.Nanyang Sunrise Mechanical&Electric Co.,Ltd,Nanyang Henan 473000,China)
With the new PG406 plate-rolling crusher’s hydraulic servo system an an example,this article established the dynamic model for the crusher’s hydraulic servo systems by the case of valve control cylinder with the MATLAB Simulink making the dynamic simulation for the hydraulic servo systems.The results proved that the MATLAB method is an effective means of the study on the dynamic simulation of hydraulic systems,providing a reference for the readers using MATLAB tomake dynamic simulation for the hydraulic servo systems.
plate-rolling crusher;MATLAB;dynamic characteristics;simulation
TD 451
A
1672-545X(2016)12-0044-03
2016-09-16
尹跃峰(1987-),男,河南平顶山人,硕士,工程师,从事工业炉、输送生产线等非标设备的设计研发工作。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
重型机械(2020年2期)2020-07-24
重型机械(2020年2期)2020-07-24
制造技术与机床(2017年5期)2018-01-19
凿岩机械气动工具(2017年3期)2017-11-22
制造技术与机床(2017年3期)2017-06-23
凿岩机械气动工具(2016年2期)2016-11-11
北京航空航天大学学报(2016年4期)2016-02-27
弹箭与制导学报(2015年1期)2015-03-11
凿岩机械气动工具(2014年2期)2014-03-01