旋翼转速监控系统虚警故障研究
2016-02-23 05:20:33潘永生汪智超
直升机技术 2016年4期
潘永生, 汪智超
(1.海军驻哈尔滨地区航空军事代表室,黑龙江 哈尔滨 150066;2.海军驻景德镇地区航空军事代表室,江西 景德镇 333000)
旋翼转速监控系统虚警故障研究
潘永生1, 汪智超2
(1.海军驻哈尔滨地区航空军事代表室,黑龙江 哈尔滨 150066;2.海军驻景德镇地区航空军事代表室,江西 景德镇 333000)
主要论述了旋翼转速监控系统的原理及其在使用过程中频繁出现的输出虚警信号故障,并对故障原因进行详细分析,给出了具体解决方案,从根本上解决了XJZ-6型旋翼最大最小转速探测盒输出虚警信号故障,保证旋翼转速监控系统工作正常。
旋翼转速;监控;故障分析
0 引言
某型机在地面开车及空中试飞过程中,出现虚警现象(未到报警门限),经排查为旋翼转速监控系统输出虚警信号。旋翼转速系统安全级别高,因此旋翼转速监控系统虚警会对空勤造成心理负担,误导空勤操纵直升机,直接影响飞行安全。
1 旋翼转速监控系统原理
当旋翼转速达到预定报警频率范围时,旋翼转速监控系统发出高频或低频音调,提醒空勤立即采取措施[1-2]。通过安装在主减速器机匣上的磁转速传感器测量主减速器旋翼支柱上的音轮转速,根据转速大小,磁传感器输出相应频率信号给XJZ-6最大最小转速探测盒,后者根据频率的大小判断旋翼是否欠速和超速,如有,输出给报警器发出告警声音(图1)。
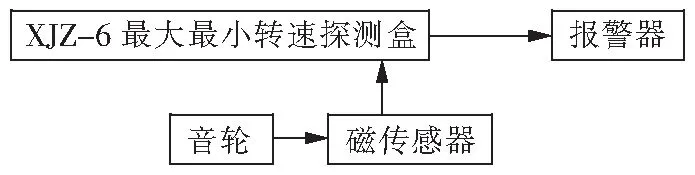
图1 旋翼转速监控系统原理
告警范围如表1所示。

表1 告警范围
2 故障原因分析
2.1 初步确认故障原因
1) 排除电磁干扰
由于XJZ-6探测盒安装在机头设备舱内,而磁传感器安装在主减速器上,两者之间的导线穿过了前机身电缆通道,如果传输导线经过的电磁环境恶劣,可能会对旋翼转速监控系统造成电磁干扰。通过对传输导线的屏蔽以及成品安装搭接情况的测量检查,屏蔽与搭接符合技术要求,并采用机舱内单独飞线的方法,经过试飞,故障依旧,排除了由于线路电磁干扰而导致旋翼转速监控系统虚警的可能。
2) 排除系统其它成品故障
将XJZ-6探测盒从机上拆下,更换为基本型XJZ-1探测盒,重新进行地面开车检查及空中试飞验证,故障现象消失,确认旋翼转速监控系统中的磁传感器和报警器无故障。
通过上述分析,初步判定为XJZ-6探测盒问题导致虚警故障。
2.2 故障原因分析
XJZ-6探测盒与XJZ-1探测盒从外部接口和工作原理上讲,二者没有区别,但是内部器件的选择有不同,报警频率范围也有所不同。
1) XJZ-6与XJZ-1的控制原理
XJZ-6探测盒接收输入的磁传感器采集的脉冲正弦信号fin经整形电路整形后输出矩形波,然后输入光电隔离电路,矩形波进入单片机,矩形波的周期与时间基准经过滤波后,便得到一个与输入脉冲信号的频率成正比(即与旋翼转速成正比)的直流电压,由单片机计算分析后输出一直流电平Vout,当Vout输出相应高电平信号时,探测盒输出低频或高频报警信号,如图2所示。

图2 XJZ-6原理图
同理,XJZ-1探测盒接受输入的正弦信号fin经整形电路整形后输出一矩形波,然后输入脉宽调制电路,在时基电路标准频率调制下产生一个脉宽不变的矩形波,经二阶低通滤波器滤波后输出一直流电压Vout,当Vout小于欠速报警比较器的基准电压VR时,比较器输出一高电平信号,开关三极管导通,输出低频报警信号;当Vout大于超速报警比较器的基准电压VR时,比较器输出一高电平信号,输出高频报警信号。如图3所示。
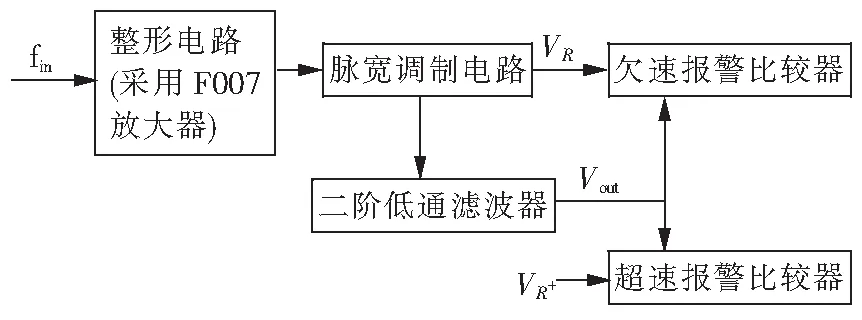
图3 XJZ-1原理图
2)信号比较电路对故障的影响
通过对故障现象的分析,我们在试验室通过连续改变输入信号振幅,模拟传感器在空中的工作状态。试验台原理如图4所示。
图4中的旋翼最大最小转速探测盒接上XJZ-6,将信号频率固定在85Hz后改变其幅值,用示波器跟踪整形电路的输出波形时,发现在整形后的方波信号的上、下沿出现了振荡脉冲(见图5)。欠速指示灯时亮时灭。
按图4换上XJZ-1时,欠速指示灯正常燃亮,符合要求。
通过接XJZ-6试验现象分析:如果传感器输出信号波形中引入了振荡脉冲,单片计算机就会误将该脉冲认为是一个频率比较高的信号,从而输出报警信号。由于脉冲幅值的不稳定性,小幅值的脉冲被光电隔离电路除掉了,而大幅值的脉冲通过光电隔离电路输送给单片机,使得欠速指示灯时亮时灭。
XJZ-6和XJZ-1在试验中出现欠速指示灯产生不同燃亮状态,这主要是由于两个探测盒内部处理频率信号的方式是不一样的,XJZ-1采用通用运算放大器,而XJZ-6是采用电压比较器。比较器工作在非线性区,强调快速翻转。运算放大器的响应时间大于比较器的响应时间(F193比较器TR=1.3nS ;F007放大器TR=0.3μS),比较器比运算放大器更加灵敏,当变化的输入信号接近比较器门限电压时,叠加在信号上面的干扰信号会使比较器产生误翻转。
根据前面分析,我们把XJZ-6由比较器构成的整形电路改为用运算放大器组成整形电路,对2件XJZ-6实施了改进,改进后的产品按图4进行试验后,仍有1件产品仍存在不同程度的虚警。
3)振荡脉冲对故障的影响
通过更改XJZ-6内部比较电路后,并未真正地消除故障,从图6中仍可以看出整形改进后电路输、出的方波信号仍带有振荡脉冲,我们分析认为是传感器输出的信号叠加有干扰信号,从而使整形电路输出信号也不理想。
为进一步排查原因,在地面搭建了模拟机平台,用磁传感器(音轮与磁传感器的安装间隙为0.2mm)与XJZ-6进行联试,测试磁传感器的输出信号,发现在过零点电压处存在有较大的脉冲噪声,联试工作情况见表2。
根据分析和试验结果,我们尝试用将比较参考点抬高0.7V的办法来避开噪声(如图7),改进后的探测盒经过反复试验,发现抑制噪声的能力得到了较好的改善,实验室试验结果见表3。但装机试验却并不理想,4件产品中有2件产品虚警,2件产品不工作。
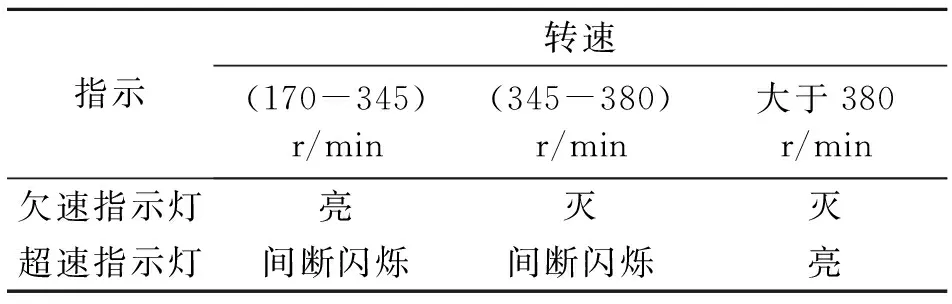
表2 联试工作情况表

表3 实验室试验结果

指示转速(170-345)r/min(345-380)r/min大于380r/min欠速指示灯亮灭灭超速指示灯灭灭亮
4)磁传感器间隙对故障的影响
从可能导致产品工作不正常的多方面原因进行技术分析,均未能解决XJZ-6虚警问题。通过机上排查传感器,发现磁传感器在直升机上与音轮间的安装间隙为1.5mm(此数值固定,机上不可改变)。配套厂家在出厂试验前音轮与磁传感器的安装间隙为0.2mm,为比较差异,在机上对磁传感器的输出电压进行了测试,发现磁传感器在正常工作时的输出电压极低,旋翼转速在250r/min时,传感器输出的峰峰值电压仅为800mV,旋翼转速在300r/min时,传感器输出的峰峰值电压仅为1000mV。为得到更详实数据,在实验室内对磁传感器在不同间隙下的性能进行了测试,其详细数据见表4。从表4可以看出磁传感器安装间隙在0.2mm时,输出电压峰峰值大于间隙在0.8mm时的输出电压峰峰值,且磁传感器与XJZ-6之间的传输导线长约为10m,通过传输导线后信号会有一定程度的衰减。
在磁传感器输出电压极低的情况下,将比较参考点电压抬高0.7V,XJZ-6就更难准确采集比较后的电压信号。
改变磁传感器与音轮间隙,与XJZ-6进行了联试,试验结果见表5。

表4 实验室内磁传感器在不同间隙下的性能测试结果

表5 联试结果
3 解决措施
通过分析,要根本上解决XJZ-6虚警问题,须从提高整形电路克服噪声和干扰的能力方面着手。
要使比较器克服噪声和干扰就要改变比较器的迟滞宽度,使其噪声和干扰在比较器的迟滞宽度内。而迟滞宽度是运算放大器上门限电压和下门限电压的差,提高器件工作电压,可以有效加大迟滞宽度。
于是在将比较器改为运算放大器的基础上,将运算放大器的工作电压由原来的+5V改为±12V并调整相关电阻参数。按此方法改进的产品在试验过程中,在将传感器间隙从0.2mm到2.7mm的范围进行变化时,产品均能正常工作,试验结果见表6。
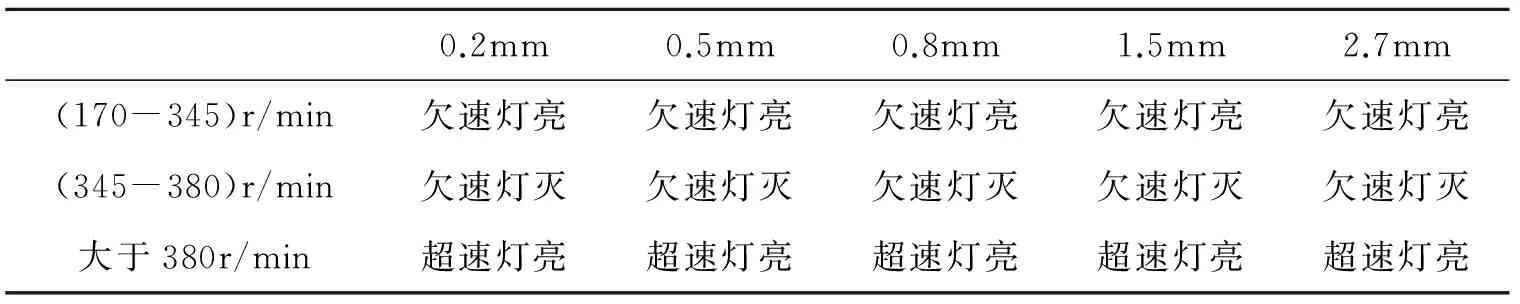
表6 传感器间隙从0.2mm到2.7mm变化试验结果
针对XJZ-6改进后试验的情况,在XJZ-6中贯彻了两条措施:(一)将电压比较器改为运算放大器。因为比较器工作在非线性区,强调快速翻转,比较器的响应时间小于运算放大器的响应时间,比较器比运算放大器更加灵敏,当变化的输入信号接近比较器门限电平时,叠加在信号上面的干扰信号会使比较器产生误翻转。(二)将运算放大器的工作电压由+5V改为±12V。因为比较器克服噪声和干扰就要改变比较器的迟滞宽度,使其噪声和干扰在比较器的迟滞宽度内。而迟滞宽度是运算放大器上门限电压和下门限电压的差,提高器件工作电压,可以有效加大迟滞宽度。
将XJZ-6旋翼最大最小转速探测盒按以上两条进行改进后,在直升机上进行了多次地面开车检查及空中试飞验证,均未出现虚警现象,确认已完全排除故障。
4 结束语
本文通过对XJZ-6虚警故障的分析,找到了虚警故障原因。在保证原功能不受影响的前提下采取的两条措施,从根本上解决了XJZ-6旋翼最大最小转速探测盒输出虚警信号故障,保证了旋翼转速监控系统正常工作,后续的产品都得到贯彻落实,产品状态良好。
[1] 陈显平.传感器技术[M]. 北京:北京航空航天大学出版社,2015.
[2] 吴文明.传感器原理及检测技术[M].北京:航空工业出版社,2015.
Research on False Alarm Fault of Helicopter Blade Speed Monitoring System
PAN Yongsheng1, WANG Zhichao2
(1.Navy's Military Representative Office in Harbin, Harbin 150066, China;2.Navy's Military Representative Office in Jingdezhen, Jingdezhen 333000, China)
This paper mainly discussed the principle of helicopter blade speed monitoring system and false alarm signal fault of helicopter blade speed monitoring system, gave a detailed analysis of the cause of the malfunction and specific solutions. The solution guaranteed XJZ-6 helicopter blade maximum and minimum speed monitoring system working properly.
helicopter blade speed; monitoring; fault analysis
2016-09-19
潘永生 (1978-), 男 ,硕士, 工程师,主要研究方向:直升机使用与维护。
1673-1220(2016)04-069-04
V241.4
A
猜你喜欢
兵工学报(2022年11期)2022-12-01 12:52:12
小资CHIC!ELEGANCE(2022年2期)2022-01-11 12:32:55
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
军民两用技术与产品(2021年9期)2021-03-09 05:45:28
航空发动机(2020年3期)2020-07-24 09:03:18
数学物理学报(2020年2期)2020-06-02 11:28:48
物联网技术(2019年9期)2019-11-06 06:24:49
电子制作(2019年9期)2019-05-30 09:41:48
科学与财富(2017年24期)2017-09-06 09:52:35
设备管理与维修(2017年1期)2017-04-11 03:21:42